Gruppe L4-AAL04. Detaljeret opmåling af område 5. Gruppe 4: Peter Bisgaard Jensen og Esben Dalsgaard Johansen
|
|
|
- Maja Mikkelsen
- 7 år siden
- Visninger:
Transkript

1 Gruppe L4-AAL04 Detaljeret opmåling af område 5 Gruppe 4: Peter Bisgaard Jensen og Esben Dalsgaard Johansen 27. maj til 22. juni
2 Gruppe L4-AAL04 1
3 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Titel Detaljeret opmåling på Himmerlandsgade Tema Detaljeret opmåling Projektperiode 27. maj juni 2011 Projektgruppe L4-AAL04 Medlemmer Titelblad Synopsis Projektet omhandler detaljeret opmåling på hjørnet af Himmerlandsgade og Sjællandsgade, samt den dertilhørende baggård. Konstruktion af en 3D model af bygningen Himmerlandsgade 3, til brug i Google Earth. Esben Dalsgaard Johansen Under arbejdet med det tekniske Peter Bisgård Jensen Vejledere Carsten Bech Karsten Jensen Oplagsantal 4 Sideantal 29 Bilagsantal og art 9 bilag heraf 1 CD samt 1 Teknisk kort, vedlagt sidst i rapporten. Afsluttet den 22. juni 2011 kort er der konstrueret et net for en polygon, der bl.a giver adgang til baggården. Der er foretaget et nivellement for højdebestemmelser i nettet, og herfra er der foretaget detailmålinger til brug i kortet. I forbindelse med samtlige målinger er fejlgrænser blevet beregnet og vurderet. Det endelige korts nøjagtighed er også blevet beregnet og vurderet. Rapportens indhold er frit tilgængeligt, men offentliggørelse (med kildeangivelse) må kun ske efter aftale med forfatterne 2
4 Gruppe L4-AAL04 3
5 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Indholdsfortegnelse INDHOLDSFORTEGNELSE 4 Bilagsoversigt 4 INDLEDNING 5 PROJEKTETS FORUDSÆTNINGER OG KONTROL AF INSTRUMENTER OG REDSKABER 6 Forudsætninger for beregninger 6 NIVELLEMENT NETSKITSE 7 NIVELLEMENT 8 Geometrisk nivellement 8 Fejlgrænser 9 Trigonometrisk nivellement 10 Fejlgrænser 10 Vurdering 11 POLYGONBEREGNING - NETSKITSE 13 POLYGONBEREGNING 14 Polygonberegning i lokalt system 14 Polygonberegning i landsdækkende system 16 DETAILPUNKTSBEREGNING 17 Vurdering af detailpunkterne 17 Målestoksfaktoren 18 Residualer 19 3 eller flere kendte punkter 19 2 kendte punkter 20 Bueskæring 20 Kontrolpunkter 21 SUPPLERENDE MÅLINGER 22 KONTROL AF KORTETS NØJAGTIGHED 23 Bygningsdimensioner 23 Kontrollinjer 25 3D MODELLERING 26 KONKLUSION 27 LITTERATURLISTE 29 Bilagsoversigt Målebog Bilag A CD Bilag B Dokumentationsfiler Bilag C Teknisk kort Bilag D 3Dmodel Bilag E Kortets nøjagtighed Bilag F Kat_obs Bilag G Kontrol af instrumenter og udstyr Bilag H Spred.pol Bilag I 4
6 Gruppe L4-AAL04 Indledning Projektet beskriver udarbejdelsen af et teknisk kort over område 5, som er beliggende omkring hjørnet, samt tilhørende baggård af Sjællandsgade og Himmerlandsgade. Derudover beskriver projektet udarbejdelsen af en 3D model af en tildelt bygningsdel i område 5. Projektet er gennemført i forbindelse med anden del af landinspektørstudiets 4. semester ved Aalborg Universitets Institut for Samfundsudvikling og Planlægning, i tidsperioden 27. maj juni Temaet for projektet er Detaljeret opmåling, og har til formål at give de studerende et grundlæggende kendskab til: - Anvendelse af landmålingsmetoder og -instrumenter - Anvendelse af automatiseret kortlægning i forbindelse med fremstilling af tekniske kort - Anvendelse af landmålingens fejlteori i forbindelse med valg af målemetoder og instrumenter samt ved vurdering af udført målingers kvalitet. I forbindelse med den detaljerede opmåling har projektgruppen benyttet sig af totalstation: Leica TCR1205+ (AAU-ID 62866), samt et digitalt nivellerinstrument: Leica Sprinter 100M (AAU- ID 62845). Tilhørende udstyr, heriblandt prismer og stadie er også benyttet til opmålingen. Følgende planfikspunkter er tildelt til projektgruppen; 5001, 5005, 5012 og 5028 til polygonberegning i net. Følgende højdefikspunkter er benyttet 9249, 9252 og 9348 til bestemmelsen af koten på egne punkter i net. Under bearbejdning og vurdering af data indsamlet på instrumenterne er MATLAB, samt MATLAB-programmet TMK blevet benyttet. Under udfærdigelsen af det tekniske kort og 3D modellen, samt ved opmålinger af dimensioner er CAD-softwaren AutoCAD Map 2011 anvendt. Til 3D-model er også anvendt Google Earth I situationer, hvor det er nødvendigt at afrunde tal, bliver der konsekvent ved manuel indsamling af data afrundet på sidste decimal. Eksempel: Hvis denne er 5 er afrundingsproceduren sådan, at der er rundes op fra 5-9 og ned fra 0-5. I forbindelse med opmålingen er projektgruppens punkter inddelt efter følgende skala: Detailpunkter Hjælpepunkt Fri opstilling D modelpunkt Kilder er skrevet med Chicago-metoden. Dog er alle kilder ikke angivet med sildetal, men derimod med angivelse af formelnummer. 5
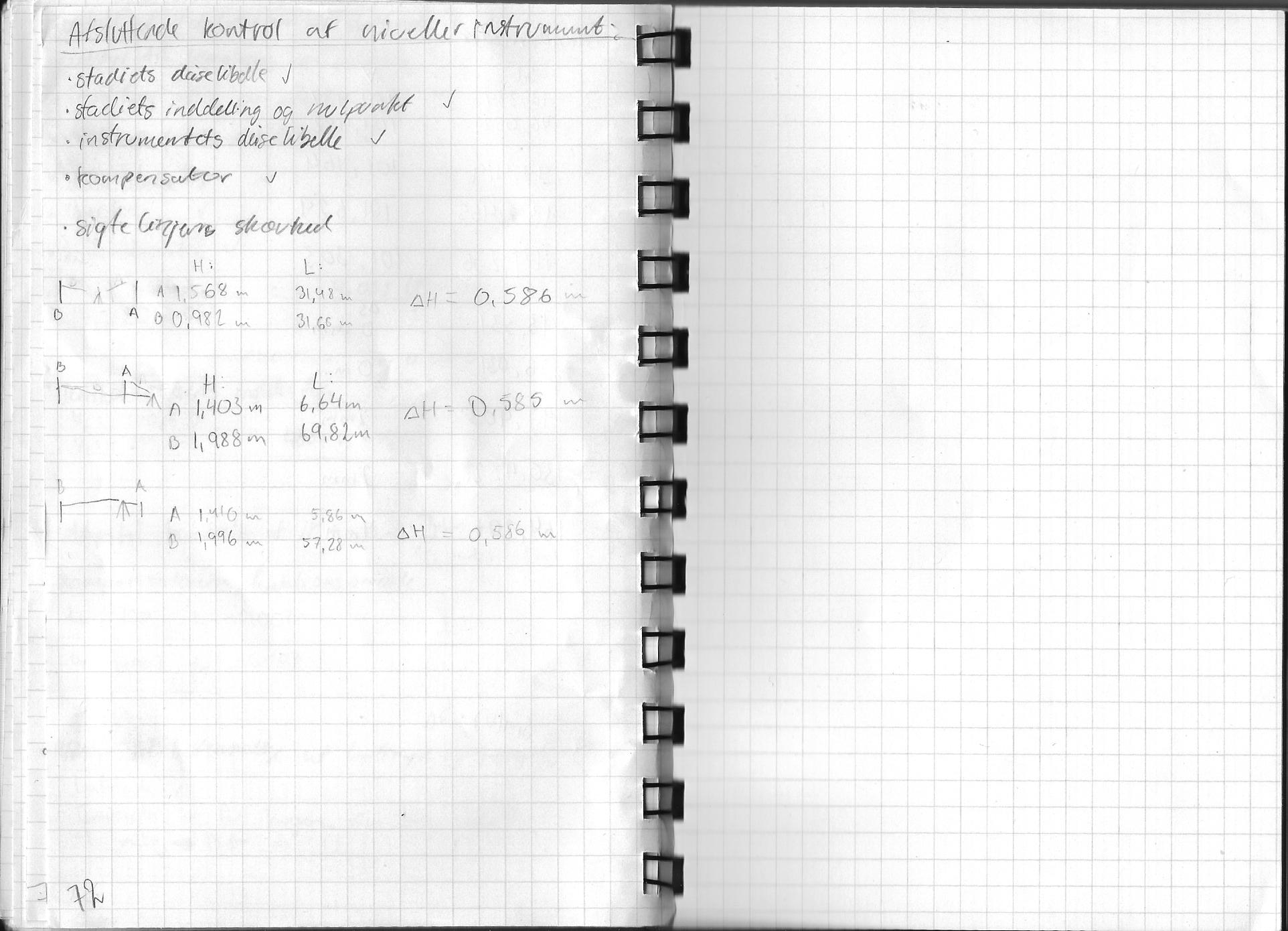
7 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Projektets forudsætninger og kontrol af instrumenter og redskaber Det udleverede udstyr, herunder bl.a. totalstation, nivelleringsinstrument, stadie og prismestok er inden opmålingens påbegyndelse kontrolleret for fejl jf. Appendiks A og B i Øvelser i Landmåling (Jensen, Karsten, 2010) Nivelleringsinstrumentet blev i forbindelse med kontrollen kalibreret til at måle korrekt. Derudover viste kontrollen ikke fejl på instrumenter og redskaber. Oversigt over kontrol af instrumenter og redskaber er at finde i bilag H Forudsætninger for beregninger Til beregning af fejlgrænser er følgende konstanter benyttet: Geometrisk nivellement Kilometerspredning (σ k ) = 0,005 m/ km Polygonmåling (afstandsmåling og horisontalretningsmåling) Grundfejl (σ g ) = 0,001 m Afstandsafhængig fejl (σ a ) = 0,0015 m/km Centreringsspredning (σ c ) = 0,005 m Spredning på en horisontalretning målt ved en sats (σ r ) = 0,001 g Trigonometrisk nivellement Spredning på en zenitdistance målt ved en sats (σ V ) = 0,001 g Spredning på refraktionskoefficient (σ k ref ) = 0,15 Spredning på instrumenthøjden (σ ih ) = 0,005 m Spredning på sigteskivehøjden (σ sh ) = 0,005 m Refraktionskoefficient (k ref ) = 0,13 Jordens radius (R) = m 6
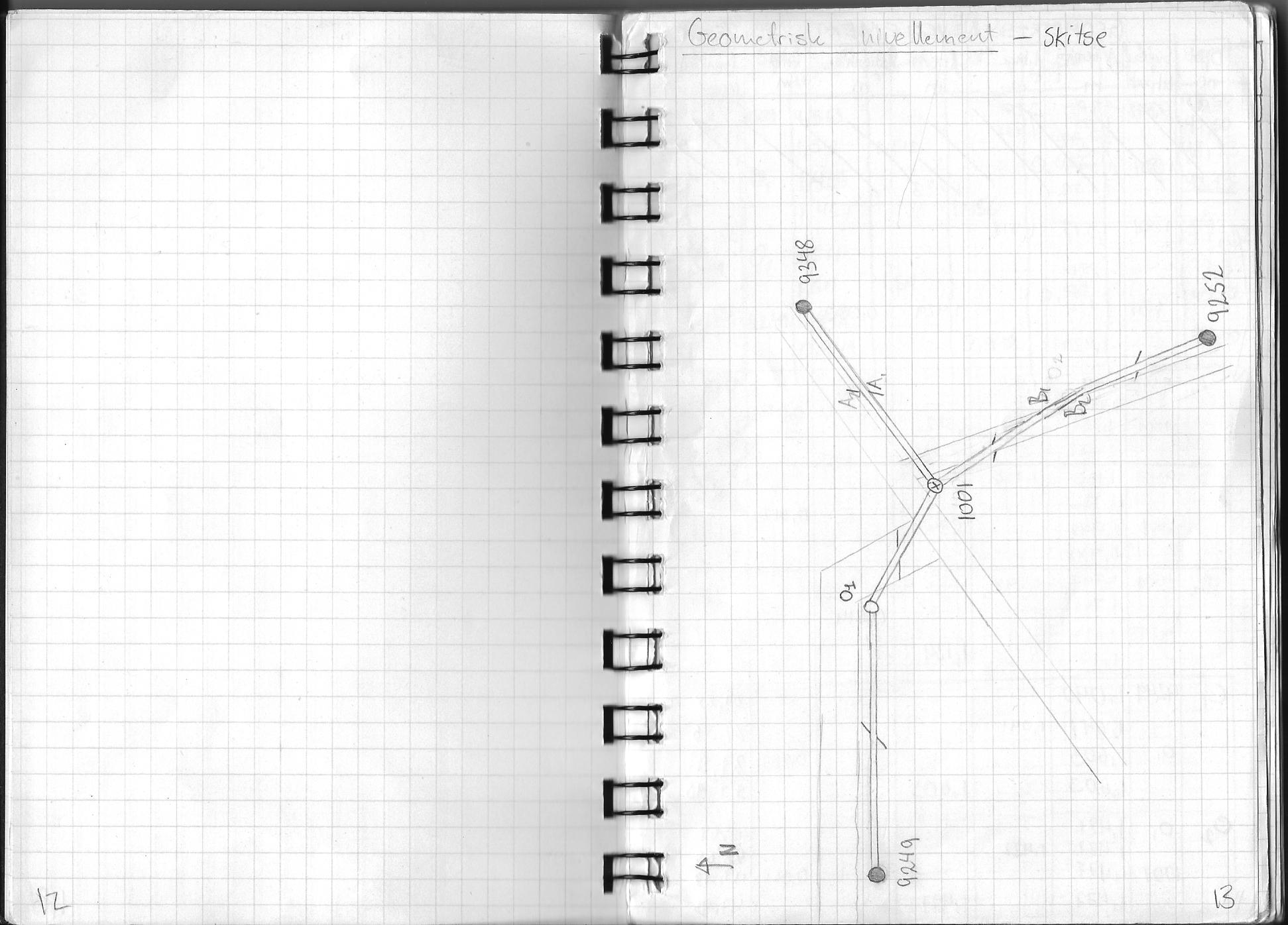
8 Gruppe L4-AAL04 Nivellement Netskitse 7
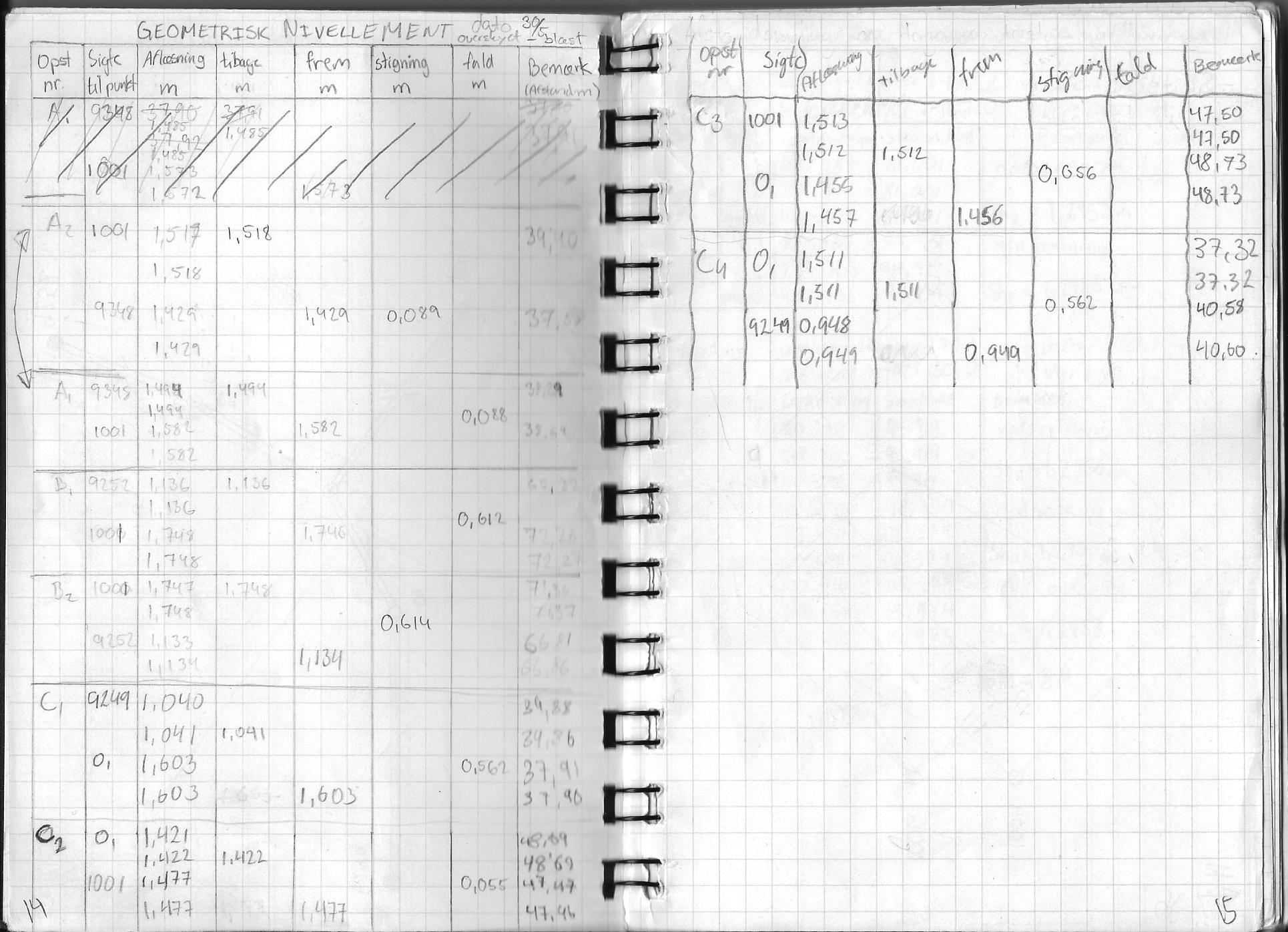
9 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Nivellement I forbindelse med udarbejdelsen af koterne til nettet er der foretaget to forskellige nivelleringsmetoder. Først er der foretaget et geometrisk nivellement fra 3 kendte højdefikspunkter ind til projektgruppens hjælpepunkt nr for at fastlægge koten til hjælpepunktet. Derefter er der foretaget et trigonometrisk nivellement til resten af projektgruppens hjælpepunkter, så koten til disse kan bestemmes. Der følgende afsnit omhandler beregninger vedrørende fastlæggelsen af hjælpepunkternes kote, og de i den forbindelse tilknyttede fejlgrænser. Geometrisk nivellement I forbindelse med nivellementet ind til 1001 er der foretaget 3 dobbeltnivellementer, et fra hvert af de kendte højdefikspunkter, hvor informationerne om højdefikspunkterne er hentet via KMS webservice Valdemar. Højdefikspunkt Beskrivelse Kote 9249 Plade mærket G.I. 4,157 m 9252 Plade mærket G.I. 4,151 m 9348 Bolt mærket A.K m Tabel 1 - Højdefikspunkter fra Valdemar Data indsamlet i forbindelse med nivellementer er at finde i målebogen 1. Efter de 3 nivellementer var foretaget blev der fundet 3 forskellige koter for punkt Disse er beregnet efter følgende formel. t = stadieaflæsningen ved tilbagesigtet i meter f = stadieaflæsningen ved fremsigtet i meter n = betegner der samlede antal opstillinger (Jensen, Karsten, 2005 [5.1]) Beregningerne er foretaget i TMK, og har givet os følgende foreløbige højder til punkt 1001 Nivellement ΔH ΔH middel Afstand Foreløbig Filnavn højde ,617 0,618-0,617 m 0,17 km 0,17 km 3,540 m NivGeom- 1.dok ,612 0,614-0,613 m 0,14 km 0,14 km 3,538 m NivGeom- 3.dok ,088 0,089-0,088 m 0,08 km 0,08 km 3,540 m NivGeom- 2.dok Tabel 2 - Tabel over foreløbige højder til Se bilag A 8
10 Gruppe L4-AAL04 For at bestemme den endelige højde til hjælpepunkt 1001 vægtes de foreløbige højder i forhold til længden af nivellementet, idet kortere sigter vægtes højere, da der er mindre risiko for fejl i dem. Dette gøres ved hjælp af en formel som ser således ud: K n = den foreløbige højde L n = den nivellerede strækning (Winding og Møller [s.19]) For vores tal ser beregningen således ud: Hjælpepunkt Kote ,539 m Tabel 3 - Beregnet kote Fejlgrænser For at kontrollere det geometriske nivellement beregnes i følgende fejlgrænser for henholdsvis afvigelserne, summen af afvigelserne og gabet. Den maksimalt tilladte afvigelse d mellem to lige gode højdemålinger d MAX beregnes ud fra følgende formel Summen af afvigelserne over n strækninger må ikke overstige: (Jensen, Karsten, 2005 [10.2]) Hvor (Jensen, Karsten, 2005 [10.3]) n = antallet af delstrækninger L i = Længden af den i te strækning i km Derudover har projektgruppen også beregnet den maksimalt tilladte afvigelse mellem den målte middelhøjdeforskel og den beregnede højdeforskel fra de givne koordinater. Dette er gjort ved hjælp af følgende formel: (Jensen, Karsten, 2005 [10.4]) L = længden af den nivellerede strækning i km K H = nøjagtigheden på de kendte punkter 9
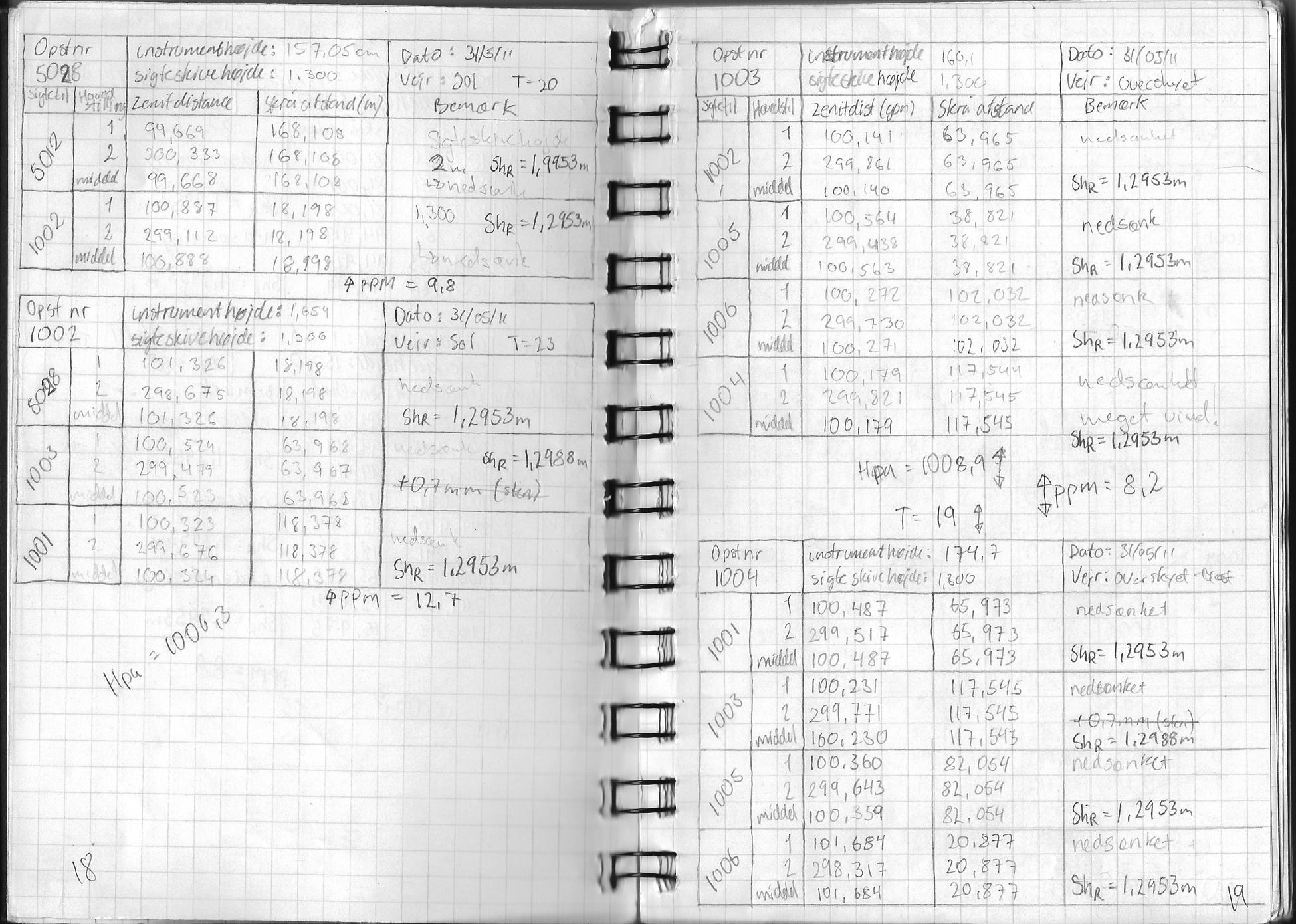
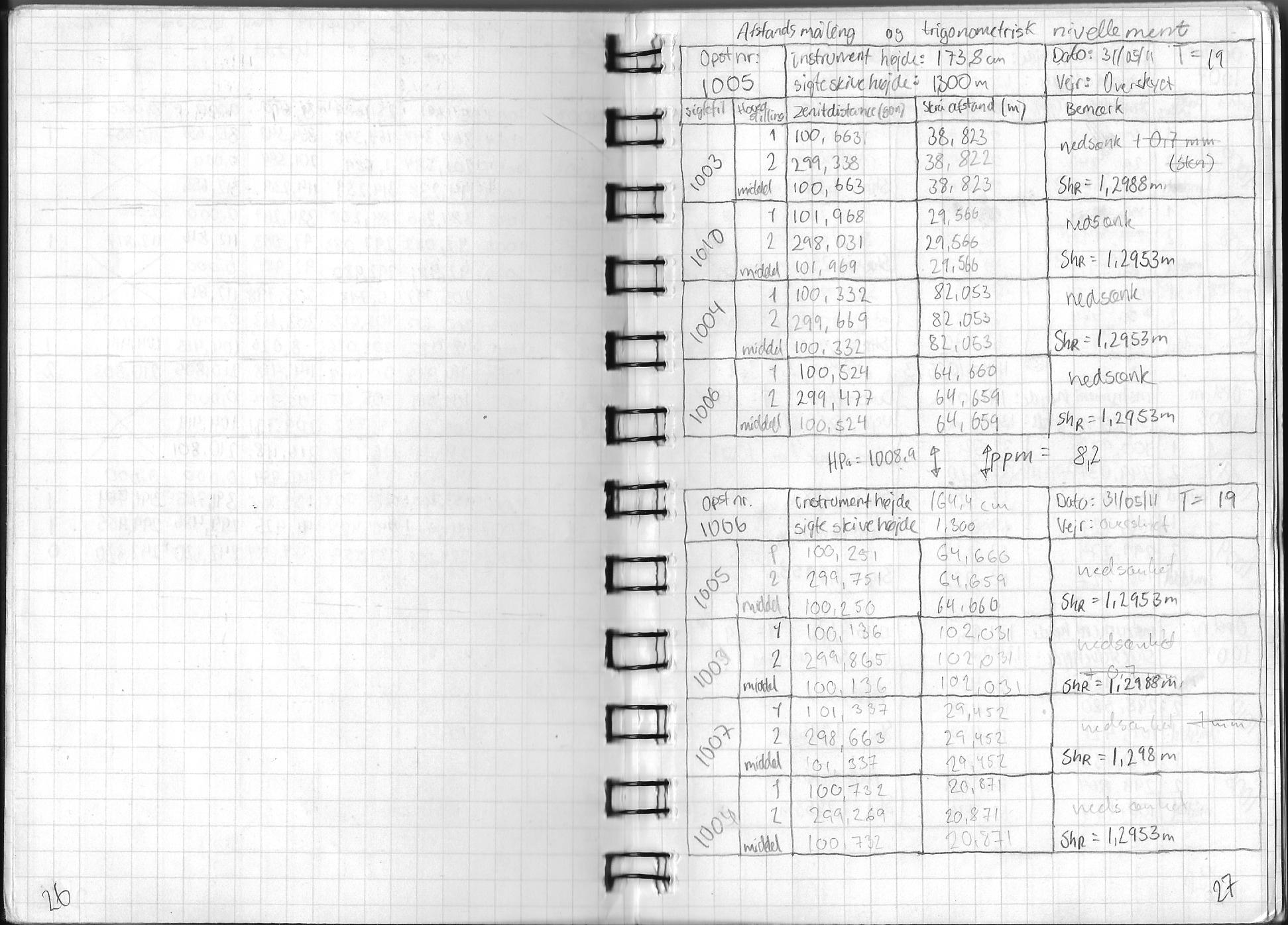
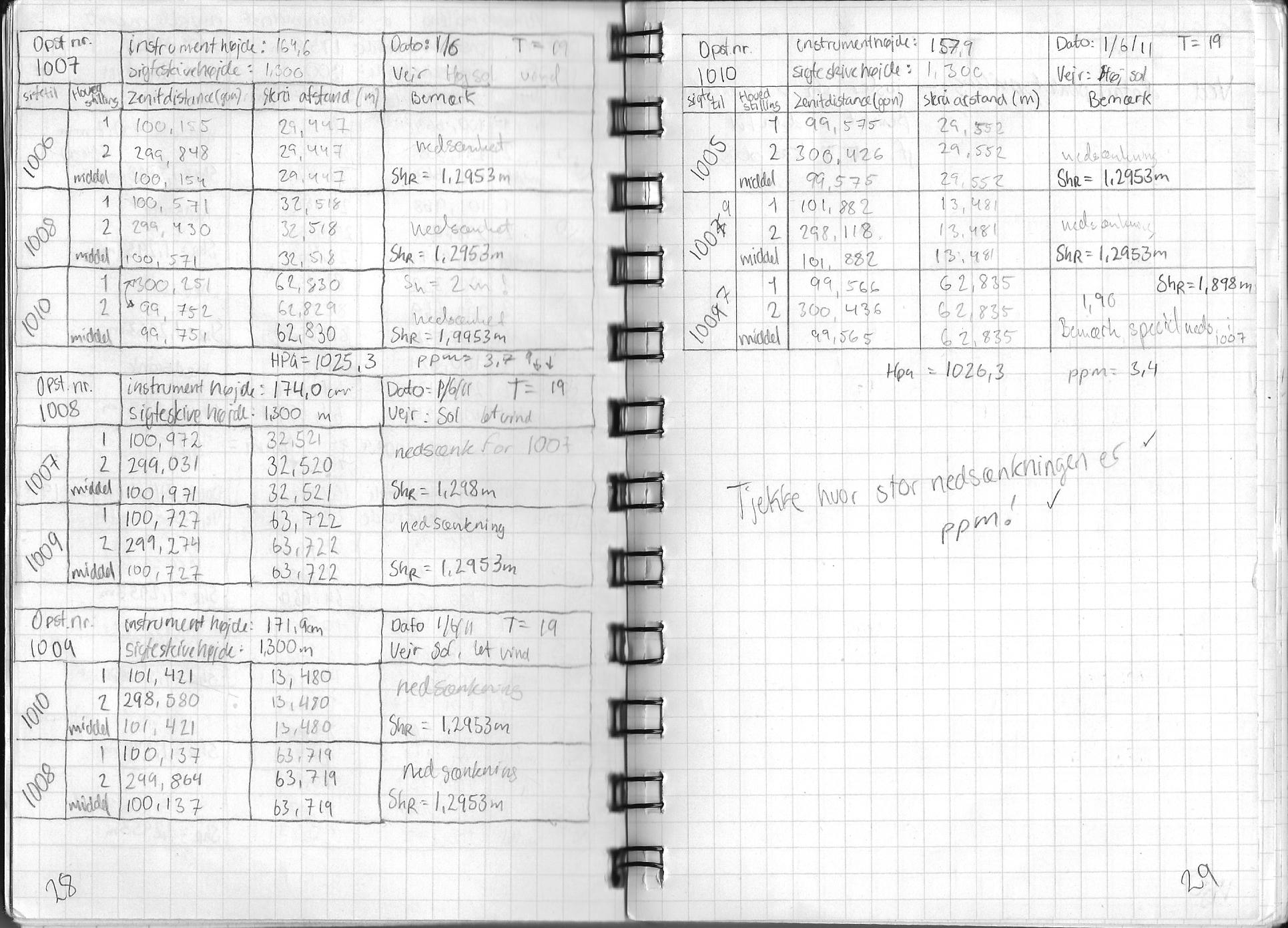
11 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Da der i forbindelsen med opmålingen ikke er opnået indsigt i, hvor nøjagtige de kendte punkter er, sættes variablen til værdien 0 for at give de højeste krav til målingerne, idet herved bliver så lille som muligt. Følgende skema skema viser fejlgrænser og fejl i det geometriske nivellement: Nivellement d d MAX D D MAX Filnavn ,001 ±0,009 0,001 ±0,004 NivGeom-1.dok ,002 ±0,008 0,002 ±0,004 NivGeom-3.dok ,001 ±0,006 0,001 ±0,003 NivGeom-2.dok Tabel 4 - Fejlgrænser ved geometrisk nivellement Det ses af ovenstående, at målingerne overholder fejlgrænserne, og derfor fortsættes med det trigonometriske nivellement ud fra hjælpepunkt 1001, der nu har en kendt kote. Trigonometrisk nivellement Det geometriske nivellement fik placeret punktet 1001 i højdesystemet DVR90. For videre at bestemme koterne til punkterne fra 1002 til 1010 er udført et trigonometrisk nivellement. Der er udført dobbeltmålinger, idet der er foretaget en opstilling i alle kendte punkter og målt til alle de punkter, der var tilgængelige fra pågældende opstilling. Herved er højdeforskellene mellem de forskellige punkter blevet dobbeltbestemt. Ud fra observationer om skråafstanden S d og Zenitdistancen V er højdeforskellene mellem punkterne beregnet i følgende trinrækkefølge i TMK: Trin Nivellement over punkt Nivellementstype NivTrig Lukket polygon NivTrig Lukket polygon NivTrig Lukket polygon NivTrig Lukket polygon NivTrig Lukket polygon Tabel 5 - Beregnede trigonometriske nivellementer Fejlgrænser For at kunne vurdere resultaterne af målingerne er det nødvendigt at beregne fejlgrænser for henholdsvis forskellene mellem dobbeltmålingerne (d), den samlede forskel mellem dobbeltmålingerne (d SUM ) og afvigelsen/gabet mellem målte højdeforskel og beregnede højdeforskel (D). For at beregne fejlgrænsen for d (d MAX ) skal størrelsen inddrages. Varians for højdeforskellen beregnes ved sigter nær vandret vha. følgende formel: ( ) (Jensen, Karsten, 2005 [6.4]) 10
12 Gruppe L4-AAL04 Udregningen er udført med programmet kat_obs2. Udskrift er at finde i bilag G. Når selve fejlgrænsen (d MAX ) skal beregnes, forudsættes det igen, at der er foretaget to lige gode målinger mellem samme højdeforskel. Herved er følgende formel for d MAX gældende: (Jensen, Karsten, 2005 [10.5]) For trigonometriske nivellementer, hvor sigtelængden er nogenlunde konstant, kan følgende formel benyttes for at beregne den samlede maksværdi for forskellen mellem dobbelmålingerne ( (Jensen, Karsten, 2005 [10.6]) Gabet kan beregnes vha. følgende formel da sigtelængden er nogenlunde konstant. (Jensen, Karsten, 2005 [10.8]) n er antallet af nivellerede delstrækninger er de givne højders nøjagtighed Da der i forbindelsen med opmålingen ikke er opnået indsigt i hvor nøjagtige de kendte punkter er, sættes variablen til værdien 0 for at give de højeste krav til målingerne, idet herved bliver så lille som muligt. Ud fra ovenstående teori om fejlgrænserne ved trigonometrisk nivellement er følgende observeret og beregnet i de forskellige trin: Trin Punkter d m NivTrig , , , ,005 NivTrig , ,002 NivTrig , ,000 NivTrig NivTrig d MAX m d SUM m d SUMMAX m Strækninger D m D MAX m ±0,030 0,004 ±0, ,002 ±0,030 ±0,030 ±0,030 0,004 ±0, ,000 ±0,021 0,009 ±0, ,001 ±0,021 0,008 ±0,030 0,008 0,026 ±0, ,001 ±0,026 0,010 0,005 ±0,030 0,005 0,019 ±0, ,001 ±0,026 0,009 Tabel 6 - Fejlgrænser ved trigonometriske nivellementer 11
13 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Vurdering Det ses i ovenstående, at grænserne er overholdt med stor margin. De endelige koter for hjælpepunkterne i nettet er derfor som følger: Hjælpepunkt Kote i DVR , , , , , , , , , ,104 Tabel 7 - Koter til hjælpepunkter 12
14 Gruppe L4-AAL04 Polygonberegning - Netskitse 13
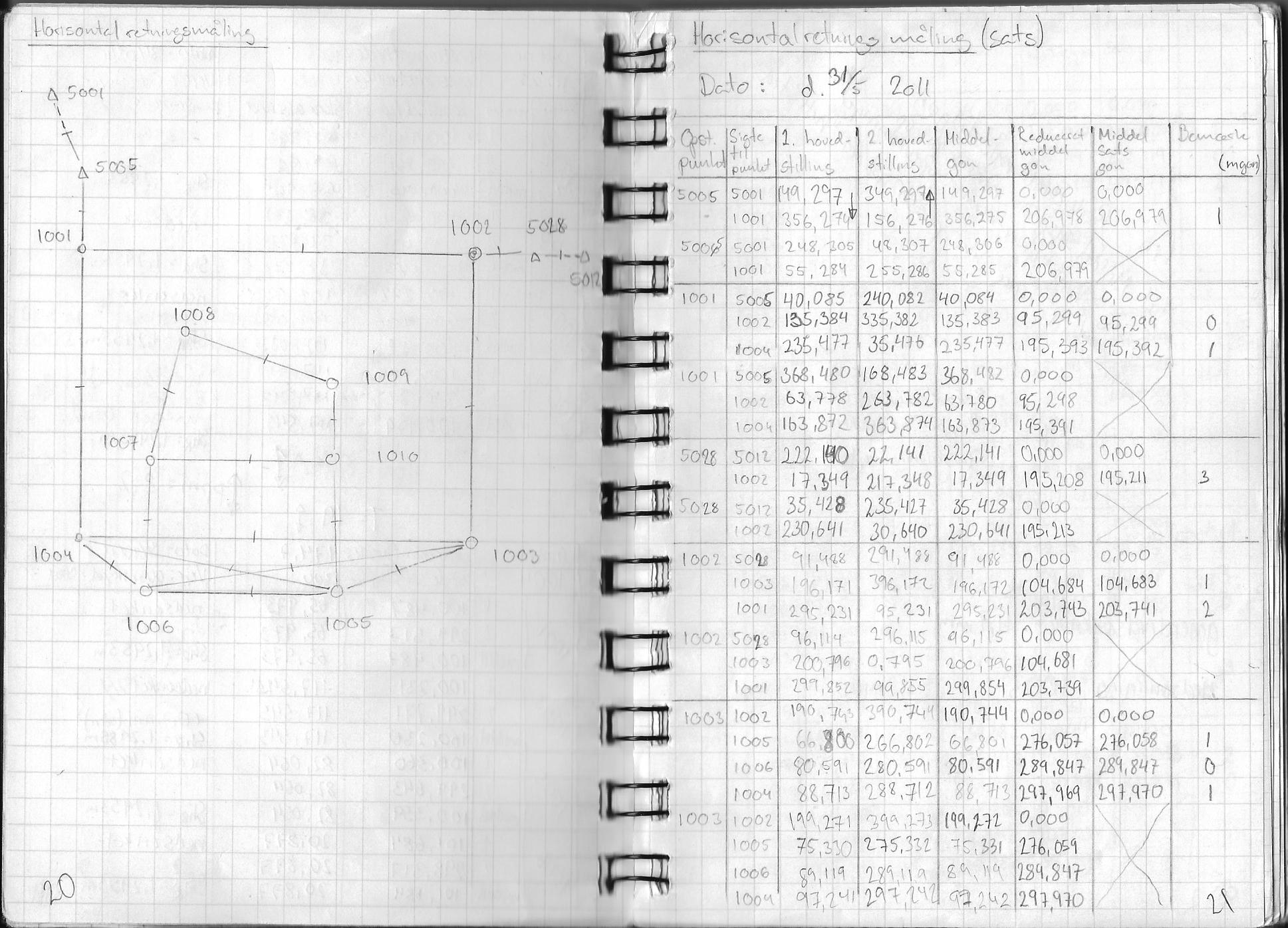
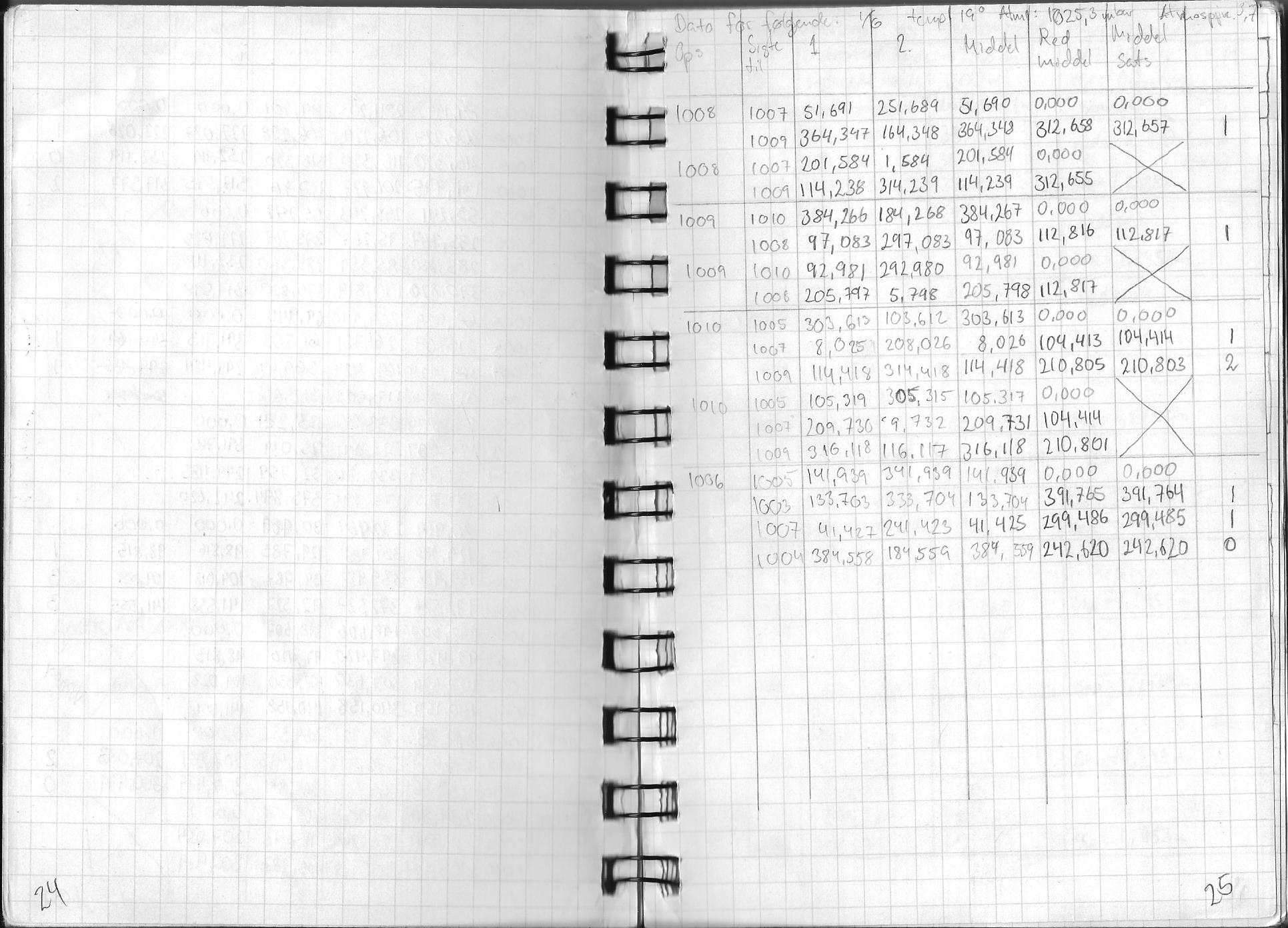
15 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Polygonberegning Alle højderne til punkterne i nettet er nu kendte, og derfor fortsætter projektgruppen med beregning af polygonerne i nettet. Dette gøres for at bestemme de plane koordinater til hjælpepunkterne. Først vil koordinaterne blive beregnet i et lokalt system for at kontrollere om fejlgrænserne indenfor polygonberegningen bliver overholdt. På betingelse af, at koordinaterne i det lokale net er acceptable foretages beregningerne igen i det landsdækkende koordinatsystem DKTM2 Til bestemmelse af hjælpepunkterne er der foretaget måling af horisontalretning, zenitdistance og skrå afstand, som alle kan findes i bilag A. Derudover er planfikspunkterne 5001, 5005, 5012 og Dog skal det bemærkes, at disse ikke er anerkendte af Kort og Matrikelstyrelsen, men er udleveret af vejleder. Planfikspunkt E N Tabel 8 - Planfikspunkters koordinater Polygonberegning i lokalt system I forbindelse med konstruktionen af net skitsen bliver projektgruppens målte punkter først udregnet i et lokalt system for at kontrollere punkternes indbyrdes nøjagtighed ved vurdering af vinkelsums fejl og gab. Derfor bliver planfikspunkterne ikke benyttet her, og beregningerne foretages kun på baggrund af hjælpepunkterne. Det gøres ved at udregne koordinaterne i polygoner, som er konstrueret med færrest mulige ukendte punkter. De regnes ud fra hjælpepunkt 1001, hvis koordinater sættes til (E, N) = (1000, 1000). Data, der ligger til grund for polygonberegningerne, er at finde i bilag A. Et skema over de beregnede polygoner ses herunder. # Polygon Type Filnavn Lukket Polygon-1.dok Almindelig Polygon I Polygon-2.dok Almindelig Polygon I Polygon-3.dok Almindelig Polygon I Polygon-4.dok Almindelig Polygon I Polygon-5.dok Tabel 9 - Polygoner i lokalt system Overordnet er polygonerne beregnet ved, at der ud fra et punkt til næste punkt laves en linje hvis retning bestemmes ved at lægge horisontalretningen til retningen i udgangspunktet. Hvis denne kommer over 400 gon, subtraheres 400 gon fra. Dernæst regnes den vandrette afstand ud, og punktet afmærkes i den beregnede vandrette afstand i den målte horisontalretning. I beregningerne af nettet er programmet TMK benyttet til at foretage disse beregninger. 14
16 Gruppe L4-AAL04 I forbindelse med beregning af fejlgrænser startede projektgruppen med at beregne den maksimalt tilladte vinkelsumsfejl. Følgende er til at beregne almindelige polygoner: (Jensen, Karsten, 2005 [9.28]) n β = antal målte vinkler σ α 2 = kendte punkters nøjagtighed [( ) ( ) ] n hz = antal satser ω = 200/π S g = den gennemsnitlige sigtelængde af de 2n β sigter i meter σ α 2 er ukendt, og derfor sættes denne til 0 for at beregningen af vinkelsumsfejlen bliver foretaget med de skrappeste krav. Derefter blev det maksimale tilladte gab beregnet efter nedenstående udtryk. Gabet er et udtryk for afstanden mellem det beregnede koordinat og det kendte koordinat. (Jensen, Karsten, 2005 [9.32]) n S = antal målte sider S = den gennemsnitlige længde af de n S sider K P = kendte punkters nøjagtighed Endnu engang sættes de kendte punkters nøjagtighed til 0 af fornævnte grunde. Ovenstående udtryk er som nævnt gældende for almindelige polygoner. Udtrykkene ser anderledes ud for lukkede polygoner. σ α 2 og K P udelades, idet disse ingen indflydelse har. Idet σ α 2 og K P alligevel sættes til nul er formlerne ikke forklaret separat for lukkede polygoner. # Type VSF VSF MAX GAB GAB MAX Filnavn 1 Lukket -0,004 0,030-0,002 0,031 Polygon-1.dok 2 Alm Polygon I 0,004 0,038 0,001 0,022 Polygon-2.dok 3 Alm Polygon I -0,004 0,038 0,003 0,022 Polygon-3.dok 4 Alm Polygon I 0,001 0,071 0,003 0,026 Polygon-4.dok 5 Alm Polygon I -0,008 0,077 0,002 0,026 Polygon-5.dok Tabel 10 - Fejlgrænser i lokalt system Det ses i tabellen, at fejlgrænserne overholdt med en stor margin, derfor vil projektgruppen nu fortsætte med at beregne polygonerne i det landsdækkende system. 15
17 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Polygonberegning i landsdækkende system I det landsdækkende system er nettet beregnet efter følgende trin i TMK # Polygon Type Filnavn Almindelig polygon Polygon-11.dok Almindelig polygon Polygon-12.dok Almindelig polygon Polygon-13.dok Almindelig polygon Polygon-14.dok Almindelig polygon Polygon-15.dok Almindelig polygon Polygon-16.dok Tabel 11 - Polygoner til beregning Fejlgrænserne beregnes på samme måde som ved det lokale system. Fejl og fejlgrænser for nettet i det landsdækkende system er som følger: # Type VSF VSF MAX GAB GAB MAX Filnavn 11 Alm Polygon I -0,006 0,031 0,008 0,026 Polygon-11.dok 12 Alm Polygon I -0,004 0,036 0,007 0,026 Polygon-12.dok 13 Alm Polygon I 0,002 0,038 0,004 0,022 Polygon-13.dok 14 Alm Polygon I -0,006 0,038 0,004 0,022 Polygon-14.dok 15 Alm Polygon I 0,004 0,072 0,003 0,026 Polygon-15.dok 16 Alm Polygon I -0,008 0,077 0,003 0,026 Polygon-16.dok Tabel 12 - Fejlgrænser ved polygonberegning i landdækkende koordinatsystem Som det ses på tabellen overholder målingerne fejlgrænserne med stor margin. Derfor er de endelig koordinater for punkter i DKTM2 som følger: Planfikspunkt E N Tabel 13 - Endelige koordinater i DKTM2 til punkterne 16
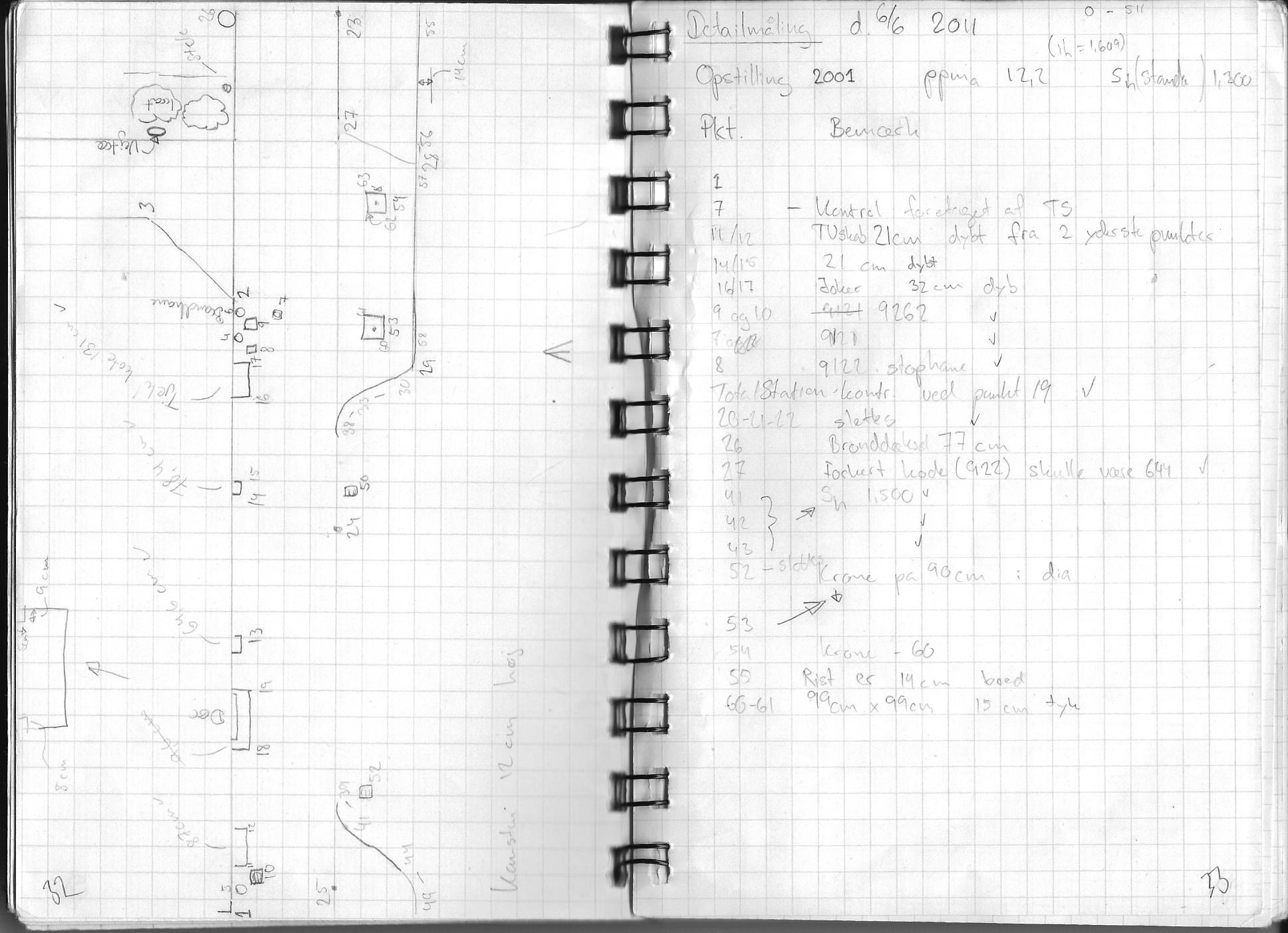
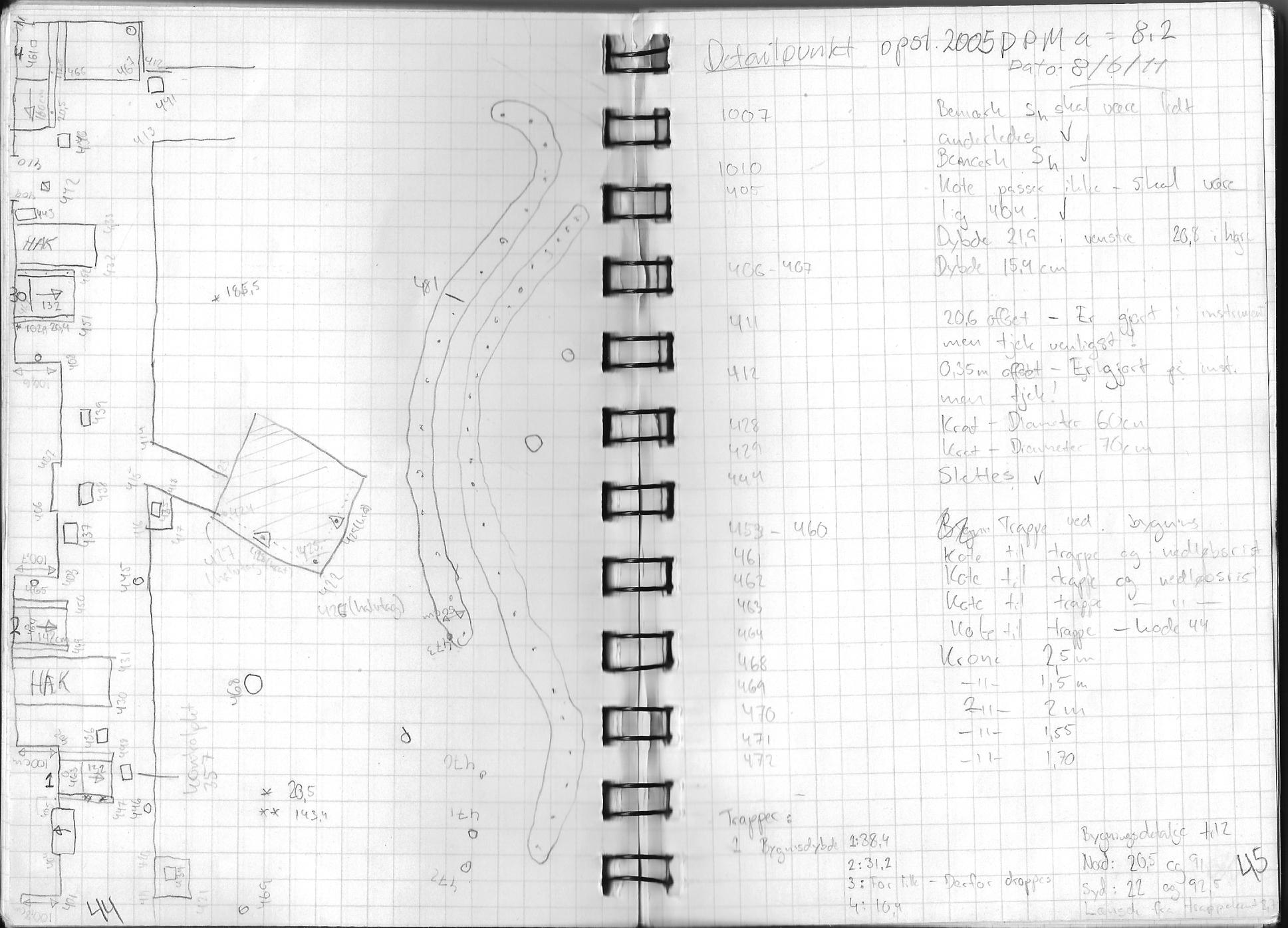
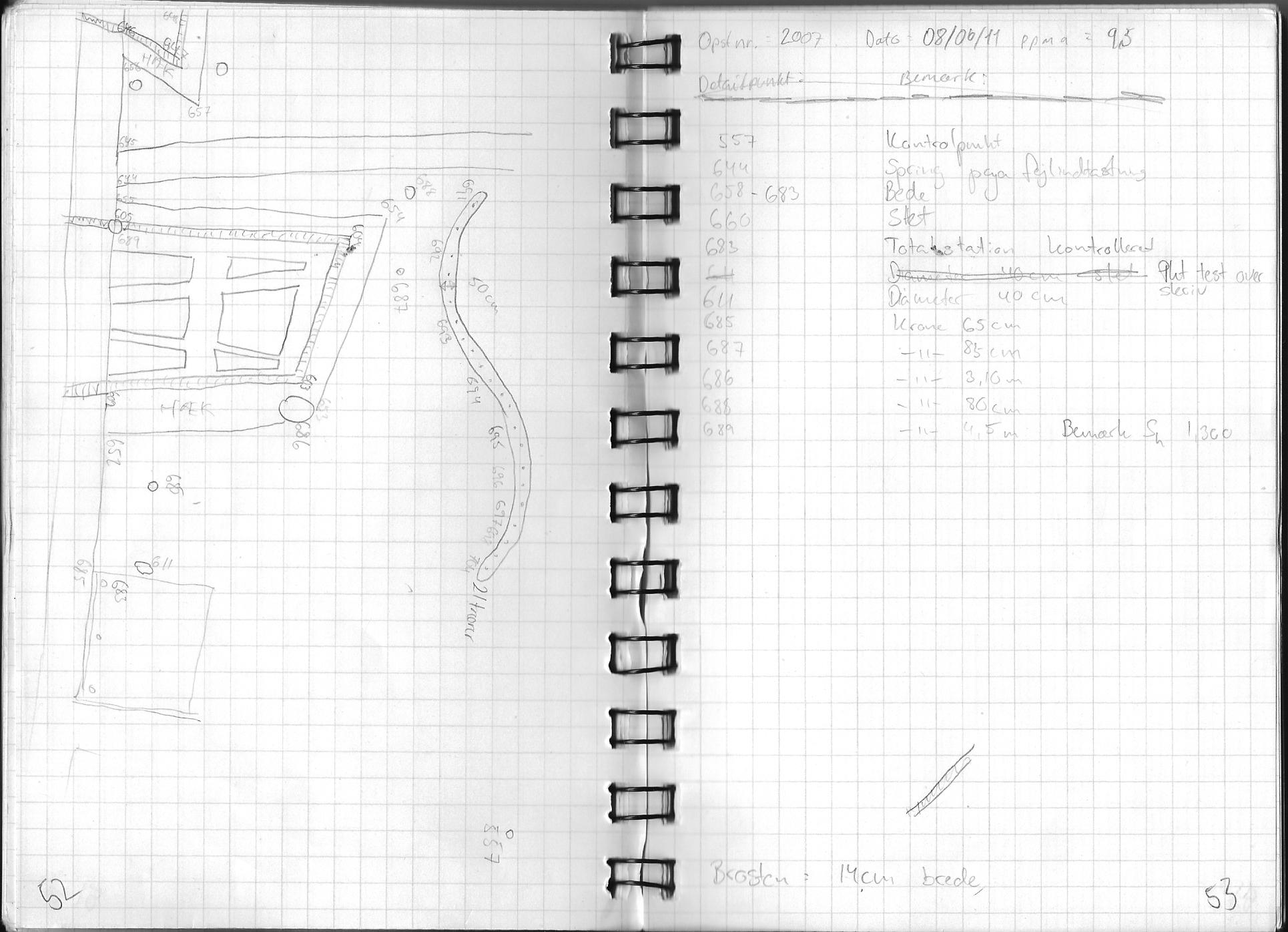
18 Gruppe L4-AAL04 Detailpunktsberegning I nærværende afsnit behandles den udførte detailmåling. Projektgruppen har kun foretaget frie opstillinger med sigte til mellem 2 og 4 kendte punkter. I afsnittet vurderes først detailpunkterne for at give værdier for spredningen af disse til de videre beregninger. Derefter vurderes henholdsvis målestoksfaktoren og residualerne for at give et grundlag for en endelig vurdering af de frie opstillinger. Dernæst vurderes punktspredningen på et bueskåret punkt. Slutteligt vurderes de kontrolpunkter, der er målt i forbindelse med opmålingen. De giver et indblik i de frie opstillingers brugbarhed. Vurdering af detailpunkterne For at vurdere hvor godt detailpunkterne er målt ind har projektgruppen beregnet punktspredningen. Denne giver et interval, som detailpunkterne ligger indenfor i forhold til det beregnede koordinat. Til vurderingen af detailpunkterne benyttes nedestående formler: Hvor (Jensen, Karsten, 2005 [11.3]) ( ) ( ) ( ) ( ) Spredningen på højdeforskellene beregnes ud fra følgende formel: Hvor ( ) (Jensen, Karsten, 2005 [6.4]) MatLAB-scriptet spred.pol er benyttet til at beregne værdien for σ P, σ S og σ β. Udskrift af dokumentationsfilerne er at finde i bilag I. Det giver følgende: Opstilling ,005 m 0,006 m 0,007 m ,005 m 0,006 m 0,007 m ,005 m 0,005 m 0,007 m ,005 m 0,005 m 0,007 m 17
19 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade ,005 m 0,006 m 0,007 m ,005 m 0,006 m 0,007 m ,005 m 0,006 m 0,007 m ,006 m 0,007 m 0,007 m ,005 m 0,006 m 0,007 m ,005 m 0,005 m 0,007 m Tabel 14 Detailpunktspredning og spredning på højden Det fremgår af ovenstående tabel, at projektgruppen kan forvente at punktspredningen ligger i intervallet 0,005 m til 0,007 m. For at give de skrappeste krav vil punktspredningen vil denne blive sat til 0,005 m for beregninger senere i rapporten. Målestoksfaktoren Målestoksfaktoren, benævnt k, er et udtryk for forholdet mellem den målte afstand i marken mellem to punkter og den beregnede afstand ud fra koordinaterne til punkterne. Projektgruppens opstillinger bliver vurderet i forhold til afvigelsen af målestoksfaktoren, hvor afvigelsen betegnes d k, og denne beregnes efter følgende formler: (Jensen, Karsten, 2005 [13.10]) Hvor (Jensen, Karsten, 2005 [13.11]) Variablen for S er sat til den samme værdi som S B, idet det giver en skrappere fejlgrænse. S B er ved vore frie opstillinger udtryk for den længste side i den polygon, som udspændes mellem de kendte punkter, der er sigtet til i opstillingen. Udtrykket for d k er beregnet i TMK I nedenstående skema ses projektgruppens frie opstillinger, samt hvilke og hvor mange kendte punkter der er sigtet til. Derudover er fejlgrænsen i forbindelse med målestoksfaktoren vurderet efter ovenstående formler: Opstilling Kendte punkter S B d k d kmax , 1004, ,375 m 51 ppm ±190 ppm , 1004, 1005, ,718 m 37 ppm ±114 ppm , 1004, 1005, ,718 m 4 ppm ±114 ppm , ,831 m 16 ppm ±243 ppm , ,831 m 34 ppm ±243 ppm , ,515 m -58 ppm ±470 ppm , 1008, ,566 m 13 ppm ±233 ppm , ,479 m -24 ppm ±470 ppm , 1004, 1005, ,718 m 6 ppm ±114 ppm Tabel 15 - Skema over opstillinger og fejlgrænser ved målestoksfaktorafvigelse 18
20 Gruppe L4-AAL04 Det ses af tabellen, at for hver opstilling er afvigelsen i målestoksfaktoren overholdt i forhold til fejlgrænsen. Derfor godkendes disse i forhold til målestoksfaktoren. Residualer 3 eller flere kendte punkter Under beregningen af fejlgrænserne for frie opstillinger med 3 eller flere kendte sigter er det muligt at beregne fejlgrænser for residualerne i E, N og Z koordinaten, hvor Z er udtryk for højden. Residualerne er beregnet i TMK. Fejlgrænserne er beregnet og sat ind i nedenstående skema efter følgende formler, (Jensen, Karsten, 2005 [13.15]) Hvor ( ) ( ) ( ) ( ) Projektgruppen har endvidere beregnet en fejlgrænse i forbindelse med 1D translation, dette er gjort på ved hjælp af førnævnte MatLAB script, på baggrund af følgende formel: Hvor ( ) (Jensen, Karsten, 2005 [13.16]) Resultatet fra arbejdet med residualerne ses i skemaet herunder: Opstilling Kendte punkter r Ei r EiMAX r Ni r NiMAX r Zi r ZiMAX ,000 0,000 0, ,001 ±0,018-0,001 ±0,018-0,000 ±0, ,001 0,000-0, ,000 0,001 0, ,000 0,000-0,000 ±0,018 ±0, ,001-0,001-0,000 ±0, ,000 0,000-0, ,000 0,000 0, ,001 0,000-0,001 ±0,018 ±0, ,000-0,000-0,001 ±0, ,001 0,000-0, ,001 ±0,018-0,000 ±0,018 0,000 ±0,021 19
21 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade ,001-0,000-0, ,000 0,001 0, ,000-0,000 0, ,001-0,001 0,001 ±0,018 ±0, ,000 0,000-0,000 ±0, ,001 0,001-0,001 Tabel 16 - Fejlgrænser ved residualer for opstilling med sigte til 3 eller flere kendte punkter Af skemaet ses det at fejlgrænserne er overholdt. 2 kendte punkter Det er ikke muligt at beregne residualer for E og N, og derfor er der kun beregnet på fejlgrænsen vedrørende 1D translation. Denne svarer til r Zi og r ZiMAX, men er i følgende benævnt d ΔH og d ΔHMAX. Proceduren for beregningen er den samme som ovenfor. Resultatet ses herunder. Opstilling Kendte punkter d ΔH d ΔHMAX , ,001 ±0, , ,001 ±0, , ,000 ±0, , ,000 ±0,021 Tabel 17 - Fejlgrænser ved 1D translation for opstilling med sigte til 2 kendte punkter Det ses at opmålingerne ligger indenfor den tilladelige fejlgrænse. Bueskæring Der er benyttet bueskæring for at bestemme enkelte punkter i bygningsdimensionerne. I følgende beskrives et eksempel på beregning af punktspredning i et tilfælde, hvor der er benyttet bueskæring Punktspredningen for et punkt der er bueskåret regnes ud fra følgende: (Jensen, Karsten, 2011 [Samtale i Hvor grupperum]) (Jensen, Karsten, 2011 [20.8]) (Jensen, Karsten, 2005 [4.8]) 20

22 Gruppe L4-AAL04 Udregningen giver følgende: Figur 1 - Eksempel på bueskæring Længdeobservationer L 1P =5,5155 m L 2P =1,093 m Vinklen P 100,3416 g L 3,124 m 0,005 m Tabel 18 - Observationer ved bueskæring Tabel 19 - Punktspredning ved bueskæring 2,11*10-5 0,005 m 0,007 m Spredningen på den endelige bueskæring i dette eksempel giver et skøn på nøjagtigheden på det punkt, der er bueskåret til. Der ses i tabellen ovenfor, at spredningen er højere end ved den polære måling. Bueskæringen resulterer altså i en lavere nøjagtighed end, hvis punktet var målt polært i dette eksempel. Kontrolpunkter På tværs af opstillingerne har projektgruppen lavet forskellige kontrolpunkter. Da baggården var stærkt bevokset, har det ikke været muligt at etablere et kontrolpunkt, der var muligt at se fra flere end to opstillinger. De etablerede kontrolpunkter er kontrolleret i forhold til den relevante fejlteori, som ses herunder: Hvor, (Jensen, Karsten, 2005 [13.17]) Hvor dette er udtryk for middelværdien for koordinaten. Ud fra denne beregnes afvigelsen fra de målte koordinater. Denne vurderes efter samme princip som punktspredningen (σ P ) i de frie opstillinger. Afvigelsen og fejlgrænsen er beregnet efter følgende procedure., (Jensen, Karsten, 2005 [13.18]) 21
23 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade Hvor Hvor, (Jensen, Karsten, 2005 [13.19]) I skemaet herunder ses at resultat af beregningerne: Ktrl. Opst E N E P N P V Ei V Ni V Ei_MAX V Ni_MAX pkt ,000 0,001 ±0,015 ±0, ,001-0,002 ±0,015 ±0, ,001 0,000 ±0,015 ±0, ,001 0,000 ±0,015 ±0, ,000 0,000 ±0,015 ±0, ,000 0,000 ±0,015 ±0, ,000 0,000 ±0,015 ±0, ,001 0,000 ±0,015 ±0,015 Tabel 20 - Fejlgrænser i forbindelse med kontrolpunkter Det ses, at projektgruppens kontrolpunkter ligger inden for fejlgrænsens interval, og er derfor godkendte. Supplerende ma linger På baggrund af mangelfuld informationsindsamling har projektgruppen været nødsaget til at foretage enkelte supplerende målinger. Disses fejlgrænser er vurderet jf. samme princip som de andre opstillinger. Resultatet ses herunder. Opstilling S B d k d kmax , ppm 243 ppm Tabel 21 - Kontrol af opstillingen Opstilling Kendte punkter d ΔH d ΔHMAX ,001 m ±0,021 m ,001 m ±0,021 m Tabel 22 - Kontrol af residualer Opstilling min. maks ,005 m 0,005 m 0,007 m Tabel 23 Detailpunktspredning og spredning på højden Det vurderes ud fra ovenstående tabeller, at de supplerende målinger er acceptable, da de ligger indenfor fejlgrænserne. I forbindelse med de supplerende målinger opstod en konflikt, idet punkterne allerede var målt ind tidligere. For at undgå at have flere punkter med samme punktnumre er de 5 første målte punkter, (5 løvtræer i række) blevet ændret til andre punktnumre i AutoCAD og i koordinatfilen. Det vurderes, at de supplerende punkter er mere pålidelige, da disse er målt ind med henblik på at bestemme bygningsdimensionerne. 22
24 Gruppe L4-AAL04 Kontrol af kortets nøjagtighed For at kontrollere kortets nøjagtighed er henholdsvis bygningsdimensionerne og 20 kontrollinjer opmålt i henholdsvis AutoCAD og med stålbånd i marken. Forskellene i afstandene må ikke overstige følgende fejlgrænse: [13.21]) (Jensen, Karsten, 2005, Hvor er den forventede punktspredning i meter. Her er benyttet den værdi fra punktspredningerne til detailmålingerne, som er mindst. Den er på 0,005. Denne værdi er benyttet, da den giver de skrappeste krav til fejlgrænsen. Derfor er som følger for kontrollen er bygningsdimensionerne og kontrollinjerne: d MAX ±0,021 m Spredningen for et stort antal bygningsdimensioner beregnes vha. følgende formel: (Jensen, Karsten, 2005, [13.22]) Hvor d i er afvigelsen vedrørende den i te bygningsdimensionerne i meter n er antallet af kontrollerede bygningsdimensioner. Spredningen må ikke afvige væsentligt fra Denne spredning kan tilsvarende benyttes til at vurdere dimensioner og kontrollinjerne. Bygningsdimensioner Bygningsdimensionerne er målt med stålbånd og i selve kortet med AutoCAD. Bygningslinje Målt med stålbånd Målt i AutoCAD Afvigelse (d i ) 1 24,000 m 24,021 m -0,021 m 2 2,495 m 2,502 m -0,007 m 3 12,619 m 12,632 m -0,013 m 4 1,408 m 1,401 m 0,007 m 5 39,406 m 39,405 m 0,001 m 6 0,995 m 0,999m -0,004 m 7 6,745 m 6,762 m -0,017 m 8 1,103 m 1,104 m -0,001 m 9 7,685 m 7,676 m 0,009 m 10 1,093 m 1,093 m 0,000 m 23
25 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade 11 5,155 m 5,155 m 0,000 m 12 5,190 m 5,183 m 0,007 m 13 1,387 m 1,358 m 0,029 m 14 3,550 m 3,554 m -0,004 m 15 1,007 m 1,007 m 0,000 m 16 6,865 m 6,880 m 0,015 m 17 1,006 m 1,008 m 0,002 m 18 6,460 m 6,465 m -0,005 m 19 0,999 m 1,000 m -0,001 m 20 6,575 m 6,580 m -0,005 m 21 1,007 m 1,014 m -0,007 m 22 6,076 m 6,076 m 0,000 m 23 0,994 m 0,994 m 0,000 m 24 6,616 m 6,648 m -0,032 m 25 1,013 m 1,013 m 0,000 m 26 2,935 m 2,935 m 0,000 m 27 0,648 m 0,656 m -0,008 m Tabel 24 - Bygningsdimensioner For bygningslinje 1 ses, at målingen kun lige når under fejlgrænsen. Det kan skyldes, at målingen med stålbånd var meget vanskelig pga. forskellige forhold på linjens strækning. Derudover var afgrænsningen på bygningen ved grænsen til projektets opmålingsområde svært definerbar. Det kan også bidrage til afvigelsen. For bygningslinje 13 er afvigelsen over det tilladelige. Bygningslinjen er en portåbning, hvor hjørnerne er svære at definere pga. uregelmæssigheder i murkanten på begge sider. Afvigelsen kan derfor godt skyldes dette forhold. Derfor vurderes afvigelsen ikke at være problematisk. For bygningslinje 24 ses, at afvigelsen er på 3,2 cm, hvilket også er over fejlgrænsen. Linjen går mellem to veldefinerede punkter, men murens to hjørner er målt fra to forskellige opstillinger. Det ene hjørne er målt fra en opstilling, hvor de supplerende detailpunkter er målt (punkt 701 til 707), mens det andet hjørne er målt fra en opstilling, hvor mange andre bygningsdetaljer, heriblandt teknik også er indmålt. I følgende vurderes fejlen i forhold til de to opstillinger og i forhold til målingen med stålbånd. Ved den opstilling, der relaterer sig til den supplerende måling, er der skiftet mellem brug af prisme og reflektorløs, hvilket kunne resultere i brugerfejl på totalstationen. Derfor er dokumentationsfilen for opstillingen kontrolleret efter om totalstationen har været indstillet korrekt for det implicerede punkt. Dette er ikke tilfældet, og derfor tilskrives fejlen ikke at have forbindelse med denne opstilling. For opstillingen, der relaterer sig til opmåling af mange forskellige punkter, kan brugen af prismet have været upræcis i forbindelse med målingen af punktet. Opmålingen med stålbånd kan være problematisk, idet muren muligvis har forskellige længder alt efter, hvor højt der måles på vægkanten. Fejlen kan muligvis tilskrives dette problem. Slutteligt i afsnittet vurderes fejlgrænsen for d MAX 24
26 Gruppe L4-AAL04 Spredning for bygningsdimensionerne er som følger jf. (Jensen, Karsten, 2005, [13.22]), der er illustreret i starten af afsnittet: 0,011 m Spredningen afviger lidt fra. Men for forudsættes det, at der er tale om veldefinerede punkter. I projektets opmålingsområde er punkterne i mange tilfælde ikke veldefinerede, og derfor vurderes afvigelsen til at være acceptabel. Kontrollinjer Skema og bemærkninger for de målte kontrollinjer er at finde i bilag F Den samlede spredning for kontrollinjerne er beregnet efter samme princip som ved bygningsdimensionerne. Den er beregnet til følgende: m Spredningen afviger igen lidt fra, men ligesom ved kontrollen af bygningsdimensionerne er der for beregningen af detailpunkterne forudsat at punkterne er veldefinerede. Derfor vurderes det endeligt, at afvigelserne for bygningslinjerne og kontrollinjerne, der er konstateret i ovenstående er acceptable. 25
27 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade 3D modellering I forbindelse med detailpunktsopmålingen er der foretaget målinger af en bygning, så der kan foretages en 3Dkonstruktion i AutoCAD. Konstruktionen i AutoCAD er foregået ved at forbinde detailpunkterne og konstruere skæringer. Tagrygningen blev målt ind fra 2 opstillinger, hvor projektgruppen ikke kunne måle til det samme punkt på hver side. Derfor er tagrygningen placeret midt imellem detailpunkterne i tagrygningen. Dernæst er bygningen konstrueret i kmlformatet, der kan implementeres i Google Earth. Her er udfærdiget en koordinatfil med de brugte punkter, hvor X, Y, Z koordinaten for de konstruerede punkter blev noteret samme sted, som de resterende punkter, der ikke var at finde i gadeplan. Efter at de nødvendige koordinater var indsamlet, blev disse ved hjælp af TMK konverteret fra DKTM2- og DVR90-koordinater til geografiske koordinater(geohetrs89-dvr90). Dernæst udfyldtes den udleverede kml-skabelon for en bygning, hvor følgende polygoner blev anvendt. Polygon Beskrivelse Tabel 25 - Polygoner ved Google Earth model Skabelonen sørger selv for at trække fladerne ned til gadeplan. Trådmodellen fra AutoCAD og 3D-modellen i Google Earth er at finde i bilag E. Højden er ikke er den rigtige i Google Earth, da dette stykke software definerer gadeplanet til at være i 8m, hvor gadeplanet jf. projektgruppens opmålinger ligger i en højde på ca. 3,5m. Projektgruppen har valgt at vise bygningens højde fra et gadeplan, der svarer til 0m. 26
28 Gruppe L4-AAL04 Konklusion For at opfylde formålet som er nævnt i indledningen, har projektgruppen for at kunne fremstille et teknisk kort foretaget et geometrisk nivellement, trigonometrisk nivellement, opmålt net i først lokalt system og herefter i landsdækkende koordinater og til sidst foretaget polære målinger af detailpunkter til det tekniske kort. For at kunne gøre dette har projektgruppen anvendt og tilegnet sig lærdom i anvendelse af landinspektørfaglige instrumenter i form af totalstation og nivellerinstrument, samt de dertilhørende redskaber. Endvidere har projektgruppen lært at anvende datastakken på totalstationen og fortage beregninger vedrørende opmålingen. Efter opmålingen af punkterne til nettet blev disse beregnet ad to omgange, først i et lokalt koordinatsystem for at tjekke for fejl, og derefter blev der beregnet i DKTM2. Højden i punkterne blev beregnet ved at foretage et geometrisk nivellement til et punkt i nettet fra 3 kendte højdefikspunkter i DVR90, som er hentet fra KMS-tjenesten Valdemar. I forbindelse med konstruktionen af nettet foretog projektgruppen en kombineret afstandsmåling og trigonometrisk nivellement, samt måling af horisontalretningen. Dette blev udført med 2 satser. Efter endt opmåling og konstruktion af punkterne i nettet, blev detailpunkterne målt ind og konstruktionen af det tekniske kort påbegyndt. Efter hvert endt opmålingssegment er der blevet beregnet og vurderet på relevante fejl og fejlgrænser for opmålingerne. Til sidst er nøjagtigheden af projektgruppens tekniske kort blevet vurderet på baggrund af 20 kontrolmålinger. Projektgruppen vurderer at kortet er nøjagtigt, selvom enkelte målinger ligger over fejlgrænsen, da der som nævnt i afsnittet om kontrolmålinger er nogle af afstandenes endepunkter, som er svære at definere præcist. Der er i forbindelse med opmålingen konstateret en gruppe af dårligt definerede punkter. De ovennævnte afstande som rammer over fejlgrænsen er til eller fra punkter, som ligger indenfor denne gruppe af punkter, der er svære at definere præcist. Det kunne have været relevant at have foretaget beregningerne for spredningen for henholdsvis bygningsdimensionerne og kontrollinjerne igen, hvor de målinger projektgruppen ved er behæftet med væsentlige fejl var forkastet. Det ville muligvis have givet et bedre bud på spredningen og dermed kortets nøjagtighed. Der er i forbindelse med opmålingen målt til kontrolpunkter, som efterfølgende kunne sammenlignes imellem opstillingerne. Men da nettet ikke har blinde polygoner kan det overvejes, om det er spild ressourcer at benytte sig af kontrolpunkter i projektgruppens tilfælde. De kunne dog have været brugbare f.eks. i forbindelse med grove fejl i opmålingerne. Da mange af projektgruppens fejlgrænser er overholdt med en stormargin, er det muligt at justere parametrene i beregningerne. Her vil det specielt være interessant at justere på σ ih, σ sh og σ c. Spredningen på sigteskivehøjden er let at aflæse, da den kan indstilles indenfor en millimeter. Derfor er en spredning på 5 mm i overkanten. Spredningen på instrumenthøjden er også mulig at justere. Denne er dog sværere at måle præcist, da den lodrette afstand ikke kan måles. Der bliver derfor målt skråt op fra punktet til totalstationen. Centringsspredningen kan 27
29 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade også justeres, da totalstation altid har stået i lod. Tilbage er centreringen af prisme- og landmålerstok, hvor projektgruppen har anstrengt sig for at måle så præcist som muligt. Hvis disse faktorer justeres kan man tilnærme sig, hvor godt projektgruppen har målt punkterne ind. Specielt hvis centreringsspredningen justeres så den passer til de beregnede fejl, vil punktspredningen kunne beregnes til at være lavere og mere realistisk i forhold til projektgruppens målinger. Herved vil man kunne få et matematisk bevis for at kortet er mere præcist. 28
30 Gruppe L4-AAL04 Litteraturliste Jensen, K. (2005). Landmåling i Teori og Praksis. Aalborg: Institut for Samfundsudvikling og Planlægning ISBN: Jensen, K. (2011). Tillæg til Landmåling i Teori og Praksis. Aalborg: Institut for Samfundsudvikling og Planlægning. ISBN: Jensen, K. (2010). Øvelser i Landmåling. Aalborg: Institut for Samfundsudvikling og Planlægning. ISSN: Poul Winding & Jens Møller Pedersen, Noter i Fejlteori 29
31

32

33
34

35
36
37
38

39
40
41

42
43
44
45
46
47
48
49
50
51
52
53

54

55
56
57

58

59
60
61

62
63
64
65

66
67
68 Dokumentationsfiler Bilag C NivGeom-1 Dokumentationsfil TMK Netberegning :30:58 GEOMETRISK NIVELLEMENT A-... (blindt) Trin: Koordinatfil med højder til referencepunkter: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dvr.koo Højdesystem: DVR 90 Observationsfil (1): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Geo.obs Observationer vedr. højdeforskelle (dh): Linie Fra Til dh Længde m km Endelige højder: Hvis en strækning er nivelleret flere gange i samme retning gennemføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr middel højde telse højde m m m m km m m m Sum Resultat: Trin Nivellement Antal Længde d D stræk- sum sum ninger km m m Geometrisk A-... dobbelt ******* NivGeom-2 Dokumentationsfil TMK Netberegning :36: 3 GEOMETRISK NIVELLEMENT A-... (blindt) Trin:
69 Dokumentationsfiler Bilag C Koordinatfil med højder til referencepunkter: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dvr.koo Højdesystem: DVR 90 Observationsfil (1): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Geo.obs Observationer vedr. højdeforskelle (dh): Linie Fra Til dh Længde m km Endelige højder: Hvis en strækning er nivelleret flere gange i samme retning gennemføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr middel højde telse højde m m m m km m m m Sum Resultat: Trin Nivellement Antal Længde d D stræk- sum sum ninger km m m Geometrisk A-... dobbelt ******* NivGeom-3 Dokumentationsfil TMK Netberegning :36:22 GEOMETRISK NIVELLEMENT A-... (blindt) Trin: Koordinatfil med højder til referencepunkter: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dvr.koo Højdesystem: DVR 90
70 Dokumentationsfiler Bilag C Observationsfil (1): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Geo.obs Observationer vedr. højdeforskelle (dh): Linie Fra Til dh Længde m km Endelige højder: Hvis en strækning er nivelleret flere gange i samme retning gennemføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr middel højde telse højde m m m m km m m m Sum Resultat: Trin Nivellement Antal Længde d D stræk- sum sum ninger km m m Geometrisk A-... dobbelt ******* NivTrig-1 Dokumentationsfil TMK Netberegning :43:13 TRIGONOMETRISK NIVELLEMENT A-...-B (lukket) Trin: Koordinatfil med højder til referencepunkter: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dvr.koo Højdesystem: DVR 90 Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkrumning og refraktion (k_j&r_dh) er beregnet jf. R = m, kref = 0.13
71 Dokumentationsfiler Bilag C Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m Endelige højder: Hvis en strækning er nivelleret flere gange i samme retning gennemføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr middel højde telse højde m m m m km m m m Sum Resultat: Trin Nivellement Antal Længde d D stræk- sum sum ninger km m m Trigonometrisk A-...-B dobbelt NivTrig-2 Dokumentationsfil TMK Netberegning :44:22 TRIGONOMETRISK NIVELLEMENT A-...-B (lukket) Trin: Koordinatfil med højder til referencepunkter: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dvr.koo Højdesystem: DVR 90
72 Dokumentationsfiler Bilag C Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkrumning og refraktion (k_j&r_dh) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m Endelige højder: Hvis en strækning er nivelleret flere gange i samme retning gennemføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr middel højde telse højde m m m m km m m m Sum Resultat: Trin Nivellement Antal Længde d D stræk- sum sum ninger km m m Trigonometrisk A-...-B dobbelt NivTrig-3 Dokumentationsfil TMK Netberegning :44:42 TRIGONOMETRISK NIVELLEMENT A-...-B (lukket) Trin: Koordinatfil med højder til referencepunkter: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dvr.koo Højdesystem: DVR 90
73 Dokumentationsfiler Bilag C Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkrumning og refraktion (k_j&r_dh) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m Endelige højder: Hvis en strækning er nivelleret flere gange i samme retning gennemføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr middel højde telse højde m m m m km m m m Sum Resultat: Trin Nivellement Antal Længde d D stræk- sum sum ninger km m m Trigonometrisk A-...-B dobbelt NivTrig-4 Dokumentationsfil TMK Netberegning :45: 6 TRIGONOMETRISK NIVELLEMENT A-...-B (lukket) Trin: Koordinatfil med højder til referencepunkter: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dvr.koo Højdesystem: DVR 90
74 Dokumentationsfiler Bilag C Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkrumning og refraktion (k_j&r_dh) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m Endelige højder: Hvis en strækning er nivelleret flere gange i samme retning gennemføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr middel højde telse højde m m m m km m m m Sum Resultat: Trin Nivellement Antal Længde d D stræk- sum sum ninger km m m Trigonometrisk A-...-B dobbelt NivTrig-5 Dokumentationsfil TMK Netberegning :45:52 TRIGONOMETRISK NIVELLEMENT A-...-B (lukket) Trin:
75 Dokumentationsfiler Bilag C Koordinatfil med højder til referencepunkter: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dvr.koo Højdesystem: DVR 90 Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkrumning og refraktion (k_j&r_dh) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m Endelige højder: Hvis en strækning er nivelleret flere gange i samme retning gennemføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr middel højde telse højde m m m m km m m m Sum Resultat: Trin Nivellement Antal Længde d D stræk- sum sum ninger km m m Trigonometrisk A-...-B dobbelt Polygon-1 Dokumentationsfil TMK Netberegning :57:17
76 Dokumentationsfiler Bilag C POLYGON A-...-A (lukket) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\lok.koo Afbildning: Lokal 1. og 2. akse: E og N Informationer vedr. orientering: Retningsvinkel fra punkt 1001 til punkt 1002: gon Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion for jordkrumning og refraktion (k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N
77 Dokumentationsfiler Bilag C gon m --> <-- m m Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Lukket / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-2 Dokumentationsfil TMK Netberegning :58:24 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\lok.koo Afbildning: Lokal 1. og 2. akse: E og N Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs
78 Dokumentationsfiler Bilag C Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion for jordkrumning og refraktion (k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m
79 Dokumentationsfiler Bilag C Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-3 Dokumentationsfil TMK Netberegning :59: 8 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\lok.koo Afbildning: Lokal 1. og 2. akse: E og N Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion for jordkrumning og refraktion (k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon m m m Endelige koordinater:
80 Dokumentationsfiler Bilag C Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-4 Dokumentationsfil TMK Netberegning :59:40 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\lok.koo Afbildning: Lokal 1. og 2. akse: E og N Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta
81 Dokumentationsfiler Bilag C gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion for jordkrumning og refraktion (k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m
82 Dokumentationsfiler Bilag C Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-5 Dokumentationsfil TMK Netberegning : 0:30 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\lok.koo Afbildning: Lokal 1. og 2. akse: E og N Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion for jordkrumning og refraktion (k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon m m m
83 Dokumentationsfiler Bilag C Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-11 Dokumentationsfil TMK Netberegning :55:41 POLYGON A-B-...C-D (almindelig) Trin:
84 Dokumentationsfiler Bilag C Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm.koo Afbildning: DKT2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Informationer vedr. beregning af ppm_n: Ortometrisk højde (H) til punkt 5001: m Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. m0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon m m m m gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion vedr. referensellipsoide (ppm_n) er beregnet jf. Nm, Rm og HF - Korrektion vedr. afbildning (ppm_sys) er beregnet jf. m0, E0, Rm, EF og ET - Korrektioner for jordkrumning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m
85 Dokumentationsfiler Bilag C Linie Fra Til HF ppm_n EF ET ppm_sys k_j&r_s S m m m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler
86 Dokumentationsfiler Bilag C - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-12 Dokumentationsfil TMK Netberegning :58:33 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm.koo Afbildning: DKT2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Informationer vedr. beregning af ppm_n: Ortometrisk højde (H) til punkt 5005: m Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. m0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon m m m m gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion vedr. referensellipsoide (ppm_n) er beregnet jf. Nm, Rm og HF - Korrektion vedr. afbildning (ppm_sys) er beregnet jf. m0, E0, Rm, EF og ET - Korrektioner for jordkrumning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m
87 Dokumentationsfiler Bilag C Linie Fra Til HF ppm_n EF ET ppm_sys k_j&r_s S m m m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m Resultat:
88 Dokumentationsfiler Bilag C Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-13 Dokumentationsfil TMK Netberegning :59: 1 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm.koo Afbildning: DKT2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Informationer vedr. beregning af ppm_n: Ortometrisk højde (H) til punkt 1001: m Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. m0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon m m m m gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion vedr. referensellipsoide (ppm_n) er beregnet jf. Nm, Rm og HF
89 Dokumentationsfiler Bilag C - Korrektion vedr. afbildning (ppm_sys) er beregnet jf. m0, E0, Rm, EF og ET - Korrektioner for jordkrumning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m Linie Fra Til HF ppm_n EF ET ppm_sys k_j&r_s S m m m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m
90 Dokumentationsfiler Bilag C 13 Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-14 Dokumentationsfil TMK Netberegning :59:41 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm.koo Afbildning: DKT2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Informationer vedr. beregning af ppm_n: Ortometrisk højde (H) til punkt 1001: m Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. m0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon m m m m gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion vedr. referensellipsoide (ppm_n) er beregnet jf. Nm, Rm og HF - Korrektion vedr. afbildning (ppm_sys) er beregnet jf. m0, E0, Rm, EF og ET - Korrektioner for jordkrumning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = m, kref = 0.13
91 Dokumentationsfiler Bilag C Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m Linie Fra Til HF ppm_n EF ET ppm_sys k_j&r_s S m m m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Alm / Ved beregning af endelige koordinater:
92 Dokumentationsfiler Bilag C - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-15 Dokumentationsfil TMK Netberegning : 0:36 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm.koo Afbildning: DKT2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Informationer vedr. beregning af ppm_n: Ortometrisk højde (H) til punkt 1004: m Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. m0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon m m m m gon gon Observationsfil (3): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion vedr. referensellipsoide (ppm_n) er beregnet jf. Nm, Rm og HF - Korrektion vedr. afbildning (ppm_sys) er beregnet jf. m0, E0, Rm, EF og ET - Korrektioner for jordkrumning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh
93 Dokumentationsfiler Bilag C gon m m m m m Linie Fra Til HF ppm_n EF ET ppm_sys k_j&r_s S m m m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m Resultat:
94 Dokumentationsfiler Bilag C Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Polygon-16 Dokumentationsfil TMK Netberegning : 1:12 POLYGON A-B-...C-D (almindelig) Trin: Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm.koo Afbildning: DKT2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Informationer vedr. beregning af ppm_n: Ortometrisk højde (H) til punkt 1006: m Observationsfil (2): C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. m0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon m m m m gon gon Observationsfil (3):
95 Dokumentationsfiler Bilag C C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atmosfæriske forhold (ppm_a) er foretaget i marken! - Korrektion vedr. referensellipsoide (ppm_n) er beregnet jf. Nm, Rm og HF - Korrektion vedr. afbildning (ppm_sys) er beregnet jf. m0, E0, Rm, EF og ET - Korrektioner for jordkrumning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = m, kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon m m m m m Linie Fra Til HF ppm_n EF ET ppm_sys k_j&r_s S m m m m m Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal målinger E N gon m --> <-- m m
96 Dokumentationsfiler Bilag C Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler m gon sider m m gon m Alm / Ved beregning af endelige koordinater: - Vinkelsumfejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt med antallet af sider Opstilling 2001 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling :30:51 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) JA* * jf. R = m og k_ref = 0.13 Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter
97 Dokumentationsfiler Bilag C *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2001 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 51 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: m 1D TRANSLATION Transformationsligning: HT = HF + ( 5.163) Residualer: Punkt Kode r_h m
98 Dokumentationsfiler Bilag C Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER:
99 Dokumentationsfiler Bilag C (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 59 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! **************************************************************************************** Opstilling 2002 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling :31:44 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) JA* * jf. R = m og k_ref = 0.13 Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ *************************************************************************************** OPSTILLINGER
100 Dokumentationsfiler Bilag C Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2002 MED SIGTE TIL 4 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 37 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 4 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 4 Spredning på vægtenheden EN: m
101 Dokumentationsfiler Bilag C 1D TRANSLATION Transformationsligning: HT = HF + ( 5.261) Residualer: Punkt Kode r_h m Antal fællespunkter: n = 4 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 3 Spredning på vægtenheden H: m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER:
102 Dokumentationsfiler Bilag C 26* (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 86 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! ****************************************************************************************
103 Dokumentationsfiler Bilag C Opstilling 2003 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling :32:23 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) JA* * jf. R = m og k_ref = 0.13 Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2003 MED SIGTE TIL 4 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m
104 Dokumentationsfiler Bilag C Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 4 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 4 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 4 Spredning på vægtenheden EN: m 1D TRANSLATION Transformationsligning: HT = HF + ( 5.206) Residualer: Punkt Kode r_h m Antal fællespunkter: n = 4 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 3 Spredning på vægtenheden H: m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan!
105 Dokumentationsfiler Bilag C OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 15 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! **************************************************************************************** Opstilling 2004 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling :36:22 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) JA* * jf. R = m og k_ref = 0.13 Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation
106 Dokumentationsfiler Bilag C E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2004 MED SIGTE TIL 2 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 16 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 2 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 0 1D TRANSLATION Transformationsligning: HT = HF + ( 4.729) Residualer: Punkt Kode r_h m
107 Dokumentationsfiler Bilag C Antal fællespunkter: n = 2 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 1 Spredning på vægtenheden H: m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER:
108 Dokumentationsfiler Bilag C (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 56 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! **************************************************************************************** Opstilling 2005 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling :37: 1 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) JA* * jf. R = m og k_ref = 0.13 Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter
109 Dokumentationsfiler Bilag C *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2005 MED SIGTE TIL 2 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 34 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 2 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 0 1D TRANSLATION Transformationsligning: HT = HF + ( 4.826) Residualer: Punkt Kode r_h m Antal fællespunkter: n = 2 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 1 Spredning på vægtenheden H: m
110 Dokumentationsfiler Bilag C IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER: *
111 Dokumentationsfiler Bilag C (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 80 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! **************************************************************************************** Opstilling 2006 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling :37:36 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) JA* * jf. R = m og k_ref = 0.13
112 Dokumentationsfiler Bilag C Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2006 MED SIGTE TIL 2 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -58 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 2
113 Dokumentationsfiler Bilag C Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 0 1D TRANSLATION Transformationsligning: HT = HF + ( 4.907) Residualer: Punkt Kode r_h m Antal fællespunkter: n = 2 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 1 Spredning på vægtenheden H: m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER: *
114 Dokumentationsfiler Bilag C (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 57 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! **************************************************************************************** Opstilling 2007 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling :38:14 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) JA* * jf. R = m og k_ref = 0.13 Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105
115 Dokumentationsfiler Bilag C E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2007 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 13 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 3 Antal ubekendte: u = 4
116 Dokumentationsfiler Bilag C Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: 1D TRANSLATION Transformationsligning: HT = HF + ( 4.810) Residualer: Punkt Kode r_h m Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: m m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER: *
117 Dokumentationsfiler Bilag C (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 64 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! **************************************************************************************** Opstilling 2008 og 2009 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling :39:19 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA*
118 Dokumentationsfiler Bilag C Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) * jf. R = m og k_ref = 0.13 JA* Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2008 MED SIGTE TIL 2 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -24 ppm Residualer: Punkt Kode r_e r_n
119 Dokumentationsfiler Bilag C m m Antal fællespunkter: n = 2 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 0 1D TRANSLATION Transformationsligning: HT = HF + ( 4.912) Residualer: Punkt Kode r_h m Antal fællespunkter: n = 2 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 1 Spredning på vægtenheden H: m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 10 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** 2. FRI OPSTILLING I PUNKT: 2009 MED SIGTE TIL 4 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar
120 Dokumentationsfiler Bilag C Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 6 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 4 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 4 Spredning på vægtenheden EN: m 1D TRANSLATION Transformationsligning: HT = HF + ( 5.241) Residualer: Punkt Kode r_h m Antal fællespunkter: n = 4 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 3 Spredning på vægtenheden H: m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger
121 Dokumentationsfiler Bilag C Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 6 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\TMK_gr4\dktm_dvr.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! **************************************************************************************** Opstilling 2010 Dokumentationsfil TMK Detailpunktsberegning jf. polær måling : 6:25 Beregning af: Koordinater i afbildning og højder i højdesystem Koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\Supplerende måling\dktm_dvr.suppl.koo Afbildning: DKTM2 1. og 2. akse: E og N Datum: Euref89 Ellipsoide: GRS80 Nm = 40 m m0 = E0 = m Rm = m Højdesystem: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atmosfæriske forhold jf. T og P i obs.fil (ppm_a) NEJ Afstande reduceres til referensellipsoide (ppm_n) JA Afstande korrigeres jf. afbildning (ppm_sys) JA Afstande korrigeres for jordkrumning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkrumning og refraktion (k_j&r_dh) JA* * jf. R = m og k_ref = 0.13 Observationsfil: C:\My Dropbox\L4Pete&E\MATLAB\Observationer\ obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transformation MED målestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen NEJ
122 Dokumentationsfiler Bilag C *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ment nr vatør i punkt nr. m punkter *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 2010 MED SIGTE TIL 2 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon m m m C mbar Korrektioner (se indledning): Punkt k_hz ppm_a ppm_n ppm_sys ppm_tot k_j&r_s k_j&r_dh gon ppm ppm ppm ppm m m Korrigerede observationer: Punkt Hz S dh gon m m FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. koordinatfil Punkt Kode EF NF HF ET NT HT m m m m m m D TRANFORMATION MED MÅLESTOKSÆNDRING Transformationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 29 ppm Residualer: Punkt Kode r_e r_n m m Antal fællespunkter: n = 2 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 0 1D TRANSLATION Transformationsligning: HT = HF + ( 4.705) Residualer: Punkt Kode r_h m
123 Dokumentationsfiler Bilag C Antal fællespunkter: n = 2 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 1 Spredning på vægtenheden H: m IKKE FÆLLESPUNKTER Koordinater i System F jf. korrigerede observationer Koordinater i System T jf. ovenstående transformationsligninger Punkt Kode EF NF HF ET NT HT m m m m m m OPSTILLINGSPUNKT: NB: HF og HT refererer til instrumentets sigteplan! OBSERVEREDE PUNKTER: 0 Fremskæring (se sidste afsnit) (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 7 nye punkter er overført til koordinatfil: C:\My Dropbox\L4Pete&E\MATLAB\Supplerende måling\dktm_dvr.suppl.koo OPDATERING **************************************************************************************** Med den valgte indstilling beregnes fremskæringer fra frie opstillinger ikke! ****************************************************************************************
124
125 3D-model Bilag E

126 3D-model Bilag E
Titel: Detaljeret opmåling. Tema: Detaljeret opmåling. Projektperiode: 4. semester, 2. del. Projektgruppe: L4-12. Synopsis
 Detaljeret opmåling Aalborg Universitet Institut for Samfundsudvikling og Planlægning Landinspektøruddannelsens 4. semester, 2. del Gruppe L4-12 2009 Foråret 2009 2 Titel: Detaljeret opmåling Tema: Detaljeret
Detaljeret opmåling Aalborg Universitet Institut for Samfundsudvikling og Planlægning Landinspektøruddannelsens 4. semester, 2. del Gruppe L4-12 2009 Foråret 2009 2 Titel: Detaljeret opmåling Tema: Detaljeret
Landinspektøruddannelsen ved Aalborg Universitet
 Forside 1 Landinspektøruddannelsen ved Aalborg Universitet Institut 0, Institut for Samfundsudvikling og Planlægning Titel: Detaljeret opmåling i Dannebrogsgade/Istedgade Tema: Detaljeret opmåling Projektperiode:
Forside 1 Landinspektøruddannelsen ved Aalborg Universitet Institut 0, Institut for Samfundsudvikling og Planlægning Titel: Detaljeret opmåling i Dannebrogsgade/Istedgade Tema: Detaljeret opmåling Projektperiode:
[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013
![[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013](/thumbs/59/43161553.jpg "[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013") 2013 Aalborg Universitet Landinspektørstudiet 4. Semester, 2. Del Af gruppe A3-2013: Michael H. Vittrup & Nicolaj H. Sørensen 21. juni 2013 [DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013 P4.2 Detaljeret opmåling
2013 Aalborg Universitet Landinspektørstudiet 4. Semester, 2. Del Af gruppe A3-2013: Michael H. Vittrup & Nicolaj H. Sørensen 21. juni 2013 [DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013 P4.2 Detaljeret opmåling
Aalborg Universitet København. Landinspektøruddannelsen 4. semester, 2. del. Detaljeret opmåling. Ballerup centrum, Linde Allé, Centrumgaden
 1 Detaljeret opmåling Ballerup Centrum, Linde Allé og Centrumgaden Aalborg Universitet København Landinspektøruddannelsen 4. semester, 2. del Detaljeret opmåling Ballerup centrum, Linde Allé, Centrumgaden
1 Detaljeret opmåling Ballerup Centrum, Linde Allé og Centrumgaden Aalborg Universitet København Landinspektøruddannelsen 4. semester, 2. del Detaljeret opmåling Ballerup centrum, Linde Allé, Centrumgaden
Udarbejdet af: L4-KBH01. Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff
 Udarbejdet af: L4-KBH01 Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff TITELBLAD Titel: Detaljeret opmåling Tema: Detailopmåling Projektperiode: 27.05.2011 til 22.06.2011 Projektgruppe: L4-KBH01
Udarbejdet af: L4-KBH01 Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff TITELBLAD Titel: Detaljeret opmåling Tema: Detailopmåling Projektperiode: 27.05.2011 til 22.06.2011 Projektgruppe: L4-KBH01
Titel: Detaljeret opmåling i område 9. Tema: Detaljeret Opmåling Projektperiode: 4. semester. Deltagere: Uffe Møller Holm. Simon Skovly Kristensen
 2 Detaljeret opmåling i område 9 Aalborg Universitet, Landinspektøruddannelsen 4 semester 3 Titel: Detaljeret opmåling i område 9 Tema: Detaljeret Opmåling Projektperiode: 4. semester Projektgruppe: L4-08
2 Detaljeret opmåling i område 9 Aalborg Universitet, Landinspektøruddannelsen 4 semester 3 Titel: Detaljeret opmåling i område 9 Tema: Detaljeret Opmåling Projektperiode: 4. semester Projektgruppe: L4-08
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester, 2012
 Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester, 2012") Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og yggeri og Anlæg, 1. semester, 2012 LCG-1. Introduktion til landmåling 1. Danmarks fikspunktsregister (I) 2. Horisontalretningsmåling
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og yggeri og Anlæg, 1. semester, 2012 LCG-1. Introduktion til landmåling 1. Danmarks fikspunktsregister (I) 2. Horisontalretningsmåling
Det tekniske kort samt 3D-model udarbejdes i referencesystemerne KP2000s og DVR90.
 Detaljeret opmåling Ballerup Centrum Gruppe 5 Jesper Nielsen & Birgitte R. Nissen Landinspektøruddannelsen 4. semester, 2. del Aalborg Universitet København, juni 2009 Forord Dette projekt er udarbejdet
Detaljeret opmåling Ballerup Centrum Gruppe 5 Jesper Nielsen & Birgitte R. Nissen Landinspektøruddannelsen 4. semester, 2. del Aalborg Universitet København, juni 2009 Forord Dette projekt er udarbejdet
KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER
 KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER AALBORG UNIVERSITET LANDINSPEKTØRUDDANNELSEN 5. SEMESTER GRUPPE 4 DECEMBER 011 1 Titel: Kortlægning og afsætning Tema: Kortlægning
KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER AALBORG UNIVERSITET LANDINSPEKTØRUDDANNELSEN 5. SEMESTER GRUPPE 4 DECEMBER 011 1 Titel: Kortlægning og afsætning Tema: Kortlægning
Landmålingens fejlteori - Lektion4 - Vægte og Fordeling af slutfejl
 Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/36 Estimation af varians/spredning Antag X 1,...,X n stokastiske
Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/36 Estimation af varians/spredning Antag X 1,...,X n stokastiske
Landmålingens fejlteori - Repetition - Fordeling af slutfejl - Lektion 8
 Landmålingens fejlteori Repetition - Fordeling af slutfejl Lektion 8 - tvede@math.aau.dk http://www.math.aau.dk/ tvede/teaching/l4 Institut for Matematiske Fag Aalborg Universitet 15. maj 2008 1/13 Fordeling
Landmålingens fejlteori Repetition - Fordeling af slutfejl Lektion 8 - tvede@math.aau.dk http://www.math.aau.dk/ tvede/teaching/l4 Institut for Matematiske Fag Aalborg Universitet 15. maj 2008 1/13 Fordeling
Vægte motiverende eksempel. Landmålingens fejlteori - Lektion4 - Vægte og Fordeling af slutfejl. Vægtet model. Vægtrelationen
 Vægte motiverende eksempel Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@mathaaudk Institut for Matematiske Fag Aalborg Universitet Højdeforskellen mellem punkterne P
Vægte motiverende eksempel Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@mathaaudk Institut for Matematiske Fag Aalborg Universitet Højdeforskellen mellem punkterne P
DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet. Den oprindelige definition af DTU-LOK er desværre gået tabt.
 Notat DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet 17. februar 2015 Projekt nr. 210914 Dokument nr. 1212704515 Version 5 Udarbejdet af MMKS 1 INDLEDNING Da DTU
Notat DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet 17. februar 2015 Projekt nr. 210914 Dokument nr. 1212704515 Version 5 Udarbejdet af MMKS 1 INDLEDNING Da DTU
Landmålingens fejlteori - Lektion4 - Vægte og Fordeling af slutfejl
 Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf13 Institut for Matematiske Fag Aalborg Universitet 1/1 Vægtet
Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf13 Institut for Matematiske Fag Aalborg Universitet 1/1 Vægtet
Tema: Landmåling og kortlægning. Projektperiode: 1. sept. 23. dec Synopsis: Projektgruppe: Henrik Skov. Nicolas Lemcke Horst
 Landmåling & Kortlægning -Ved Hadsundvej & Humlebakken Projektgruppe 4 Landinspektøruddanelsens 5. semester Henrik Skov, Nicolas Lemcke Horst & Anders Knørr Lyseen Aalborg Universitet december 2008 Landmåling
Landmåling & Kortlægning -Ved Hadsundvej & Humlebakken Projektgruppe 4 Landinspektøruddanelsens 5. semester Henrik Skov, Nicolas Lemcke Horst & Anders Knørr Lyseen Aalborg Universitet december 2008 Landmåling
Bilag G1: Geometrisk nivellement
 Bilag G1: Geometrisk nivellement Højdemåling fra højdefikspunkt 62-13-09947 til fikspunkt 5501 Geometriske nivellement mellem Valdemarpunkt 62-13-09947 og hjælpe punkt 5501, der er udført ved dobbelt nivellement.
Bilag G1: Geometrisk nivellement Højdemåling fra højdefikspunkt 62-13-09947 til fikspunkt 5501 Geometriske nivellement mellem Valdemarpunkt 62-13-09947 og hjælpe punkt 5501, der er udført ved dobbelt nivellement.
Kortlægning og Teknisk Måling
 Kortlægning og Teknisk Måling Aalborg Universitet Landinspektørstudiets Projektgruppe 13 December 2006 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Fibigerstræde 11-13 9220 Aalborg
Kortlægning og Teknisk Måling Aalborg Universitet Landinspektørstudiets Projektgruppe 13 December 2006 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Fibigerstræde 11-13 9220 Aalborg
Kortlægning og teknisk måling
 Kortlægning og teknisk måling Gruppe L5 01 Aalborg Universitet Landinspektøruddannelsens 5. semester December 2007 L-Studienævnet Fibigerstræde 11 9220 Aalborg Øst Tlf. 96 35 83 41 www.lsn.aau.dk Titel:
Kortlægning og teknisk måling Gruppe L5 01 Aalborg Universitet Landinspektøruddannelsens 5. semester December 2007 L-Studienævnet Fibigerstræde 11 9220 Aalborg Øst Tlf. 96 35 83 41 www.lsn.aau.dk Titel:
Notat. DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter INDHOLD. 1 Baggrund Etablering af de fysiske fikspunkter... 4
 Notat DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter April 2017 Udarbejdet af MMKS Kontrolleret af MHFR og LRLA Godkendt af MMKS INDHOLD 1 Baggrund... 2 1.1 Resultater... 3 2 Etablering af de fysiske
Notat DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter April 2017 Udarbejdet af MMKS Kontrolleret af MHFR og LRLA Godkendt af MMKS INDHOLD 1 Baggrund... 2 1.1 Resultater... 3 2 Etablering af de fysiske
Detaljeret Opmåling. af Lautrupvang 2, 2A og 2B. Gruppe 2: Casper Aagaard Madsen og Nikolaj Ahlberg Purhus. Landinspektørstudiet, 4. semester 2.
 Detaljeret Opåling af Lautrupvang 2, 2A og 2B Gruppe 2: Casper Aagaard Madsen og Nikolaj Ahlberg Purhus Landinspektørstudiet, 4. seester 2. del Aalborg Universitet København Aalborg Universitet København
Detaljeret Opåling af Lautrupvang 2, 2A og 2B Gruppe 2: Casper Aagaard Madsen og Nikolaj Ahlberg Purhus Landinspektørstudiet, 4. seester 2. del Aalborg Universitet København Aalborg Universitet København
Landmålingens fejlteori - Lektion 3. Estimation af σ Dobbeltmålinger Geometrisk nivellement Linearisering
 Landmålingens fejlteori Lektion 3 Estimation af σ Dobbeltmålinger Geometrisk nivellement Linearisering - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/31 Repetition: Middelværdi og
Landmålingens fejlteori Lektion 3 Estimation af σ Dobbeltmålinger Geometrisk nivellement Linearisering - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/31 Repetition: Middelværdi og
Titel: Landmåling og Kortlægning, Harrestrup Ådal, Ballerup
 Landmåling og kortlægning Gruppe L5_CHP07 Jakob B. Frantzen og Birgitte R. Nissen Landinspektøruddannelsen 5. semester Aalborg Universitet København, København, december 2009 Titel: Landmåling og Kortlægning,
Landmåling og kortlægning Gruppe L5_CHP07 Jakob B. Frantzen og Birgitte R. Nissen Landinspektøruddannelsen 5. semester Aalborg Universitet København, København, december 2009 Titel: Landmåling og Kortlægning,
Landmåling og kortlægning
 Landmåling og kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 6 Dijana Lubarda Malene Kobberø Regitse Vammen Titel/tema:
Landmåling og kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 6 Dijana Lubarda Malene Kobberø Regitse Vammen Titel/tema:
Kursus i Landmåling, CAD og GIS 9/9-2010
 1. Introduktion til landmåling Kursus i Landmåling, CAD og GIS 9/9-2010 1. Danmarks fikspunktsregister (I) 2. Horisontalretningsmåling og afstandsmåling 3. Detailmåling med totalstation, opstilling i kendt
1. Introduktion til landmåling Kursus i Landmåling, CAD og GIS 9/9-2010 1. Danmarks fikspunktsregister (I) 2. Horisontalretningsmåling og afstandsmåling 3. Detailmåling med totalstation, opstilling i kendt
Projektrapport. Kortlægning og afsætning
 Projektrapport Kortlægning og afsætning Udarbejdet af gruppe L5aal2011_01 Landinspektøruddannelsens 5. semester Kathrine Schmidt, Winnie Husted Andersen og Esben Dalsgaard Johansen Aalborg Universitet,
Projektrapport Kortlægning og afsætning Udarbejdet af gruppe L5aal2011_01 Landinspektøruddannelsens 5. semester Kathrine Schmidt, Winnie Husted Andersen og Esben Dalsgaard Johansen Aalborg Universitet,
Kortlægning og afsætning
 Projektrapport Gruppe L5AAL-02 2012 Kortlægning og afsætning Betavej og Den gamle Golfbane Landinspektørstudiet Aalborg Universitet December 2012 Titel: Kortlægning og afsætning Betavej og Den gamle Golfbane
Projektrapport Gruppe L5AAL-02 2012 Kortlægning og afsætning Betavej og Den gamle Golfbane Landinspektørstudiet Aalborg Universitet December 2012 Titel: Kortlægning og afsætning Betavej og Den gamle Golfbane
Detaljeret opmåling. Teknisk kort og 3D model af Fibigerstræde 13 Aalborg Ø
 Detaljeret opmåling Teknisk kort og 3D model af Fibigerstræde 13 Aalborg Ø Kasper Christensen, Morten Schmidt & Annie Bay-Smidt Landinspektør, 4. semester Juni 2012 Titelblad Titel: Detaljeret opmåling
Detaljeret opmåling Teknisk kort og 3D model af Fibigerstræde 13 Aalborg Ø Kasper Christensen, Morten Schmidt & Annie Bay-Smidt Landinspektør, 4. semester Juni 2012 Titelblad Titel: Detaljeret opmåling
Landmåling & Kortlægning. Landinspektøruddannelsens 5. semester 2009
 Landmåling & Kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 9 4. december 2009 Landmåling & kortlægning i og omkring Sohngaardsholmparken
Landmåling & Kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 9 4. december 2009 Landmåling & kortlægning i og omkring Sohngaardsholmparken
Landinspektørstudiet Landmåling og kortlægning Gruppe 9 5. semester Omkring Aalborghus kollegiet Efteråret 2008
 Forord Denne rapport udgør, sammen med dens bilag, afrapporteringen af semesterprojektet for en projektgruppe på landinspektørstudiets femte semester, hvis overordnede tema er landmåling og kortlægning.
Forord Denne rapport udgør, sammen med dens bilag, afrapporteringen af semesterprojektet for en projektgruppe på landinspektørstudiets femte semester, hvis overordnede tema er landmåling og kortlægning.
RENTES REGNING SIMULATION LANDMÅLING MÅLSCORE I HÅNDBO . K R I S T I A N S E N KUGLE G Y L D E N D A L
 SIMULATION 4 2 RENTES REGNING F I NMED N H REGNEARK. K R I S T I A N S E N KUGLE 5 LANDMÅLING 3 MÅLSCORE I HÅNDBO G Y L D E N D A L Faglige mål: Anvende simple geometriske modeller og løse simple geometriske
SIMULATION 4 2 RENTES REGNING F I NMED N H REGNEARK. K R I S T I A N S E N KUGLE 5 LANDMÅLING 3 MÅLSCORE I HÅNDBO G Y L D E N D A L Faglige mål: Anvende simple geometriske modeller og løse simple geometriske
ScanOBS nyhedsbrev. Dato: 4. maj 2018
 NYHEDSBREV 1-2018 www..dk ScanOBS nyhedsbrev Dato: 4. maj 2018 Jeg fremsender hermed nyhedsbrev for ScanOBS, der omhandler de seneste ændringer i ScanOBSprogrammerne, og jeg vil samtidigt benytte lejligheden
NYHEDSBREV 1-2018 www..dk ScanOBS nyhedsbrev Dato: 4. maj 2018 Jeg fremsender hermed nyhedsbrev for ScanOBS, der omhandler de seneste ændringer i ScanOBSprogrammerne, og jeg vil samtidigt benytte lejligheden
1/41. 2/41 Landmålingens fejlteori - Lektion 1 - Kontinuerte stokastiske variable
 Landmålingens fejlteori - lidt om kurset Landmålingens fejlteori Lektion 1 Det matematiske fundament Kontinuerte stokastiske variable - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet Kursusholder
Landmålingens fejlteori - lidt om kurset Landmålingens fejlteori Lektion 1 Det matematiske fundament Kontinuerte stokastiske variable - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet Kursusholder
Antag X 1, X 2,..., X n er n uafhængige stokastiske variable, hvor Var(X 1 )=σ 2 1,..., Var(X n )=σ 2 n.
=σ 2 1,..., Var(X n )=σ 2 n.") Simple fejlforplantningslov Landmålingens fejlteori Lektion 6 Den generelle fejlforplantningslov Antag X, X,, X n er n uafhængige stokastiske variable, hvor Var(X )σ,, Var(X n )σ n Lad Y g(x, X,, X n ),
Simple fejlforplantningslov Landmålingens fejlteori Lektion 6 Den generelle fejlforplantningslov Antag X, X,, X n er n uafhængige stokastiske variable, hvor Var(X )σ,, Var(X n )σ n Lad Y g(x, X,, X n ),
Landmaling. en introduktion. Landmåling en introduktion. Landmåling en introduktion. Nyt Teknisk Forlag. Jørgen Ullvit og Lars Fredensborg Matthiesen
 Er en indføring i landmåling, og er primært tiltænkt studerende på uddannelserne til bygningskonstruktør, byggetekniker og kort- og landmålingstekniker. Den vil uden tvivl også kunne finde anvendelse på
Er en indføring i landmåling, og er primært tiltænkt studerende på uddannelserne til bygningskonstruktør, byggetekniker og kort- og landmålingstekniker. Den vil uden tvivl også kunne finde anvendelse på
Aalborg Universitet København
 Aalborg Universitet København Aalborg Universitet Landinspektør, København Lautrupvang B & 15, 750 Ballerup Sekretær: Pia Skovlund Jensen Semester: 5. semester,.del Projektets titel: Kortlægning og afsætning
Aalborg Universitet København Aalborg Universitet Landinspektør, København Lautrupvang B & 15, 750 Ballerup Sekretær: Pia Skovlund Jensen Semester: 5. semester,.del Projektets titel: Kortlægning og afsætning
Projektopgave Observationer af stjerneskælv
 Projektopgave Observationer af stjerneskælv Af: Mathias Brønd Christensen (20073504), Kristian Jerslev (20072494), Kristian Mads Egeris Nielsen (20072868) Indhold Formål...3 Teori...3 Hvorfor opstår der
Projektopgave Observationer af stjerneskælv Af: Mathias Brønd Christensen (20073504), Kristian Jerslev (20072494), Kristian Mads Egeris Nielsen (20072868) Indhold Formål...3 Teori...3 Hvorfor opstår der
Landmålingens fejlteori - Lektion 2. Sandsynlighedsintervaller Estimation af µ Konfidensinterval for µ. Definition: Normalfordelingen
 Landmålingens fejlteori Lektion Sandsynlighedsintervaller Estimation af µ Konfidensinterval for µ - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet En stokastisk variabel er en variabel,
Landmålingens fejlteori Lektion Sandsynlighedsintervaller Estimation af µ Konfidensinterval for µ - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet En stokastisk variabel er en variabel,
Institut for Matematiske Fag Aalborg Universitet Specielt: Var(aX) = a 2 VarX 1/40. Lad X α, X β og X γ være stokastiske variable (vinkelmålinger) med
 = a 2 VarX 1/40. Lad X α, X β og X γ være stokastiske variable (vinkelmålinger) med") Repetition: Varians af linear kombination Landmålingens fejlteori Lektion 5 Fejlforplantning - rw@math.aau.dk Antag X 1, X,..., X n er uafhængige stokastiske variable, og Y er en linearkombination af X
Repetition: Varians af linear kombination Landmålingens fejlteori Lektion 5 Fejlforplantning - rw@math.aau.dk Antag X 1, X,..., X n er uafhængige stokastiske variable, og Y er en linearkombination af X
Danske koordinatsystemr (referencesystemer) MicroStation V8i. Begreber
 MicroStation V8i. Begreber") Danske koordinatsystemr (referencesystemer) MicroStation V8i Begreber 1 Columbus tog fejl! - jorden er flad når vi tegner i MicroStation!!! Geodætiske begreber definition af jorden Jordens overflade Jordens
Danske koordinatsystemr (referencesystemer) MicroStation V8i Begreber 1 Columbus tog fejl! - jorden er flad når vi tegner i MicroStation!!! Geodætiske begreber definition af jorden Jordens overflade Jordens
Bedste rette linje ved mindste kvadraters metode
 1/9 Bedste rette linje ved mindste kvadraters metode - fra www.borgeleo.dk Figur 1: Tre datapunkter og den bedste rette linje bestemt af A, B og C Målepunkter og bedste rette linje I ovenstående koordinatsystem
1/9 Bedste rette linje ved mindste kvadraters metode - fra www.borgeleo.dk Figur 1: Tre datapunkter og den bedste rette linje bestemt af A, B og C Målepunkter og bedste rette linje I ovenstående koordinatsystem
Kortlægning og afsæning i Golfparken. Edin Ahmetspahic Catrine Gylling Jensen Marie Søndegård Jensen. Gruppe: L5aal
 Kortlægning og afsæning i Golfparken Af Edin Ahmetspahic Catrine Gylling Jensen Marie Søndegård Jensen Gruppe: L5aal2011-02 Gr. L5aal2011_02 Side 2 af 97 Kortlægning og afsætning: 19A~20A Efterår 2011
Kortlægning og afsæning i Golfparken Af Edin Ahmetspahic Catrine Gylling Jensen Marie Søndegård Jensen Gruppe: L5aal2011-02 Gr. L5aal2011_02 Side 2 af 97 Kortlægning og afsætning: 19A~20A Efterår 2011
RTK test udført ved Kort & Matrikelstyrelsen.
 Q RTK test udført ved Kort & Matrikelstyrelsen. Erfaringer fra 4 RTK test: Test af enkeltstations RTK, November 2000 Test af GPS referencens RTK løsning i Herning by, September 200 Test af Netværks RTK,
Q RTK test udført ved Kort & Matrikelstyrelsen. Erfaringer fra 4 RTK test: Test af enkeltstations RTK, November 2000 Test af GPS referencens RTK løsning i Herning by, September 200 Test af Netværks RTK,
Produkt og marked - matematiske og statistiske metoder
 Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet February 19, 2016 1/26 Kursusindhold: Sandsynlighedsregning og lagerstyring
Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet February 19, 2016 1/26 Kursusindhold: Sandsynlighedsregning og lagerstyring
Indholdsfortegnelse. Miljørigtige køretøjer i Aarhus. Effekter af en mere miljørigtig vognpark i Aarhus Kommune. Aarhus Kommune. Notat - kort version
 Aarhus Kommune Miljørigtige køretøjer i Aarhus Effekter af en mere miljørigtig vognpark i Aarhus Kommune COWI A/S Jens Chr Skous Vej 9 8000 Aarhus C Telefon 56 40 00 00 wwwcowidk Notat - kort version Indholdsfortegnelse
Aarhus Kommune Miljørigtige køretøjer i Aarhus Effekter af en mere miljørigtig vognpark i Aarhus Kommune COWI A/S Jens Chr Skous Vej 9 8000 Aarhus C Telefon 56 40 00 00 wwwcowidk Notat - kort version Indholdsfortegnelse
Kursusindhold: Produkt og marked - matematiske og statistiske metoder. Monte Carlo
 Kursusindhold: Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet Sandsynlighedsregning og lagerstyring Normalfordelingen og Monte
Kursusindhold: Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet Sandsynlighedsregning og lagerstyring Normalfordelingen og Monte
Anvendelse af matematik til konkrete beregninger
 Anvendelse af matematik til konkrete beregninger ved J.B. Sand, Datalogisk Institut, KU Praktisk/teoretisk PROBLEM BEREGNINGSPROBLEM og INDDATA LØSNINGSMETODE EVT. LØSNING REGNEMASKINE Når man vil regne
Anvendelse af matematik til konkrete beregninger ved J.B. Sand, Datalogisk Institut, KU Praktisk/teoretisk PROBLEM BEREGNINGSPROBLEM og INDDATA LØSNINGSMETODE EVT. LØSNING REGNEMASKINE Når man vil regne
Indholdsfortegnelse. Forord 7
 Indholdsfortegnelse Forord 7 1 Indledning 8 1.1 Baggrund 8 1.2 Kort som projekteringsgrundlag 8 1.3 Topografiske kort 8 1.4 Tekniske grundkort 9 1.5 Situationsplaner 10 1.6 Matrikelkortet 10 2 Landmåling
Indholdsfortegnelse Forord 7 1 Indledning 8 1.1 Baggrund 8 1.2 Kort som projekteringsgrundlag 8 1.3 Topografiske kort 8 1.4 Tekniske grundkort 9 1.5 Situationsplaner 10 1.6 Matrikelkortet 10 2 Landmåling
Institut for Matematiske Fag Matematisk Modellering 1 UGESEDDEL 6
 Institut for Matematiske Fag Matematisk Modellering 1 Aarhus Universitet Eva B. Vedel Jensen 25. februar 2008 UGESEDDEL 6 Forelæsningerne torsdag den 21. februar og tirsdag den 26. februar. Jeg har gennemgået
Institut for Matematiske Fag Matematisk Modellering 1 Aarhus Universitet Eva B. Vedel Jensen 25. februar 2008 UGESEDDEL 6 Forelæsningerne torsdag den 21. februar og tirsdag den 26. februar. Jeg har gennemgået
Kalibrering af Trimble S-serien
 Kalibrering af Trimble S-serien Kalibreringsopgaver; 1. Libelle(r) 2. Optisk lod 3. Horisontal/vertikal kollimation samt horisontalaksens skævhed 4. Autolock kollimation 5. Afstandsmåler 6. Laserpeger
Kalibrering af Trimble S-serien Kalibreringsopgaver; 1. Libelle(r) 2. Optisk lod 3. Horisontal/vertikal kollimation samt horisontalaksens skævhed 4. Autolock kollimation 5. Afstandsmåler 6. Laserpeger
Emnehæfte. Beregning af koter, fald, anlæg og rumfang. Kloakrørlæggeruddannelsen
 Efteruddannelsesudvalget for bygge/anlæg og industri (BAI) Emnehæfte Beregning af koter, fald, anlæg og rumfang Kloakrørlæggeruddannelsen Undervisningsministeriet. 12. september 2006. Materialet er udviklet
Efteruddannelsesudvalget for bygge/anlæg og industri (BAI) Emnehæfte Beregning af koter, fald, anlæg og rumfang Kloakrørlæggeruddannelsen Undervisningsministeriet. 12. september 2006. Materialet er udviklet
Måling af turbulent strømning
 Måling af turbulent strømning Formål Formålet med at måle hastighedsprofiler og fluktuationer i en turbulent strømning er at opnå et tilstrækkeligt kalibreringsgrundlag til modellering af turbulent strømning
Måling af turbulent strømning Formål Formålet med at måle hastighedsprofiler og fluktuationer i en turbulent strømning er at opnå et tilstrækkeligt kalibreringsgrundlag til modellering af turbulent strømning
2 Erik Vestergaard www.matematikfysik.dk
 Erik Vestergaard www.matematikfysik.dk Erik Vestergaard www.matematikfysik.dk 3 Lineære funktioner En vigtig type funktioner at studere er de såkaldte lineære funktioner. Vi skal udlede en række egenskaber
Erik Vestergaard www.matematikfysik.dk Erik Vestergaard www.matematikfysik.dk 3 Lineære funktioner En vigtig type funktioner at studere er de såkaldte lineære funktioner. Vi skal udlede en række egenskaber
Fynsgade Silkeborg Tlf maj 2009
 Q/Holm SE Nr. 10 47 53 41 Fynsgade 4 8600 Silkeborg Tlf. 86 80 54 03 21 41 83 46 tfh@qholm.dk 12. maj 2009 Holbæk Kommune Projekt: Kontrolopmåling af Åmose Å Fra Skellingsted Bro st. 17. 462 Til Bromølle
Q/Holm SE Nr. 10 47 53 41 Fynsgade 4 8600 Silkeborg Tlf. 86 80 54 03 21 41 83 46 tfh@qholm.dk 12. maj 2009 Holbæk Kommune Projekt: Kontrolopmåling af Åmose Å Fra Skellingsted Bro st. 17. 462 Til Bromølle
Nærføring mellem banen Nykøbing F-Rødby og 132 kv kabelanlægget Radsted-Rødsand 2
 Dette dokument beskriver en nærføringssag med de forskellige aktiviteter, der er foretaget. En dyberegående teori omkring formler og tilnærmelser, som er anvendt kan studeres i Nærføringsudvalgets håndbog
Dette dokument beskriver en nærføringssag med de forskellige aktiviteter, der er foretaget. En dyberegående teori omkring formler og tilnærmelser, som er anvendt kan studeres i Nærføringsudvalgets håndbog
Kursusindhold: Produkt og marked - matematiske og statistiske metoder. Monte Carlo
 Kursusindhold: Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet Sandsynlighedsregning og lagerstyring Normalfordelingen og Monte
Kursusindhold: Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet Sandsynlighedsregning og lagerstyring Normalfordelingen og Monte
Rapport uge 48: Skråplan
 Rapport uge 48: Skråplan Morten A. Medici, Jonatan Selsing og Filip Bojanowski 2. december 2008 Indhold 1 Formål 2 2 Teori 2 2.1 Rullebetingelsen.......................... 2 2.2 Konstant kraftmoment......................
Rapport uge 48: Skråplan Morten A. Medici, Jonatan Selsing og Filip Bojanowski 2. december 2008 Indhold 1 Formål 2 2 Teori 2 2.1 Rullebetingelsen.......................... 2 2.2 Konstant kraftmoment......................
Access version 1.5 Totalstation Opstilling Opmåling Afsætning
 Access version 1.5 Totalstation Opstilling Opmåling Afsætning Juli 2010 Per Dahl Johansen GEOTEAM A/S pdj@geoteam.dk Opstilling Opstilling af selve instrumentet Instrumentet opstilles på stativet og stilles
Access version 1.5 Totalstation Opstilling Opmåling Afsætning Juli 2010 Per Dahl Johansen GEOTEAM A/S pdj@geoteam.dk Opstilling Opstilling af selve instrumentet Instrumentet opstilles på stativet og stilles
Landmålingens fejlteori Lektion 1 Det matematiske fundament Kontinuerte stokastiske variable
 Landmålingens fejlteori Lektion 1 Det matematiske fundament Kontinuerte stokastiske variable - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/41 Landmålingens fejlteori - lidt om kurset
Landmålingens fejlteori Lektion 1 Det matematiske fundament Kontinuerte stokastiske variable - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/41 Landmålingens fejlteori - lidt om kurset
1 Ensidet variansanalyse(kvantitativt outcome) - sammenligning af flere grupper(kvalitativ
 - sammenligning af flere grupper(kvalitativ") Indhold 1 Ensidet variansanalyse(kvantitativt outcome) - sammenligning af flere grupper(kvalitativ exposure) 2 1.1 Variation indenfor og mellem grupper.......................... 2 1.2 F-test for ingen
Indhold 1 Ensidet variansanalyse(kvantitativt outcome) - sammenligning af flere grupper(kvalitativ exposure) 2 1.1 Variation indenfor og mellem grupper.......................... 2 1.2 F-test for ingen
grupper(kvalitativ exposure) Variation indenfor og mellem grupper F-test for ingen effekt AnovaTabel Beregning af p-værdi i F-fordelingen
 Variation indenfor og mellem grupper F-test for ingen effekt AnovaTabel Beregning af p-værdi i F-fordelingen") 1 Ensidet variansanalyse(kvantitativt outcome) - sammenligning af flere grupper(kvalitativ exposure) Variation indenfor og mellem grupper F-test for ingen effekt AnovaTabel Beregning af p-værdi i F-fordelingen
1 Ensidet variansanalyse(kvantitativt outcome) - sammenligning af flere grupper(kvalitativ exposure) Variation indenfor og mellem grupper F-test for ingen effekt AnovaTabel Beregning af p-værdi i F-fordelingen
Matematiske hjælpemidler. Koordinater. 2.1 De mange bredder.
 2. Matematiske hjælpemidler. Koordinater. 2.1 De mange bredder. 2.1 I Figur 1.1 i kapitel 1 er der vist et ideelt Kartesiske eller Euklidiske koordinatsystem, med koordinater ( X, Y, Z) = ( X 1, X 2, X
2. Matematiske hjælpemidler. Koordinater. 2.1 De mange bredder. 2.1 I Figur 1.1 i kapitel 1 er der vist et ideelt Kartesiske eller Euklidiske koordinatsystem, med koordinater ( X, Y, Z) = ( X 1, X 2, X
Potensfunktioner samt proportional og omvent proportional. for hf Karsten Juul
 Potensfunktioner samt proportional og omvent proportional for hf 2018 Karsten Juul Potensfunktion 1. Oplæg til forskrift for potensfunktion...1 2. Forskrift for potensfunktion...2 3. Udregn x eller y i
Potensfunktioner samt proportional og omvent proportional for hf 2018 Karsten Juul Potensfunktion 1. Oplæg til forskrift for potensfunktion...1 2. Forskrift for potensfunktion...2 3. Udregn x eller y i
Erik Vestergaard, Haderslev 2010
 Erik Vestergaard, Haderslev 2010 Erik Vestergaard www.matematikfysik.dk 3 1. Det første nøjagtige Danmarks kort Før år 1760 eksisterede der landkort over Danmark, men de var meget upræcise. Det første
Erik Vestergaard, Haderslev 2010 Erik Vestergaard www.matematikfysik.dk 3 1. Det første nøjagtige Danmarks kort Før år 1760 eksisterede der landkort over Danmark, men de var meget upræcise. Det første
Retningslinjer for bedømmelsen. Georg Mohr-Konkurrencen 2010 2. runde
 Retningslinjer for bedømmelsen. Georg Mohr-Konkurrencen 2010 2. runde Det som skal vurderes i bedømmelsen af en besvarelse, er om deltageren har formået at analysere problemstillingen, kombinere de givne
Retningslinjer for bedømmelsen. Georg Mohr-Konkurrencen 2010 2. runde Det som skal vurderes i bedømmelsen af en besvarelse, er om deltageren har formået at analysere problemstillingen, kombinere de givne
Fysik 2 - Den Harmoniske Oscillator
 Fysik 2 - Den Harmoniske Oscillator Esben Bork Hansen, Amanda Larssen, Martin Qvistgaard Christensen, Maria Cavallius 5. januar 2009 Indhold 1 Formål 1 2 Forsøget 2 3 Resultater 3 4 Teori 4 4.1 simpel
Fysik 2 - Den Harmoniske Oscillator Esben Bork Hansen, Amanda Larssen, Martin Qvistgaard Christensen, Maria Cavallius 5. januar 2009 Indhold 1 Formål 1 2 Forsøget 2 3 Resultater 3 4 Teori 4 4.1 simpel
Afsætning og kortlægning
 2012 Afsætning og kortlægning Annie Bay-Smidt & Malte Holm-Christiansen Landinspektør 5.semester 03-12-2012 2 Afsætning og kortlægning Titelblad Titelblad Titel: Afsætning og kortlægning Tema: Afsætning
2012 Afsætning og kortlægning Annie Bay-Smidt & Malte Holm-Christiansen Landinspektør 5.semester 03-12-2012 2 Afsætning og kortlægning Titelblad Titelblad Titel: Afsætning og kortlægning Tema: Afsætning
Tilhørende: Robert Nielsen, 8b. Geometribog. Indeholdende de vigtigste og mest basale begreber i den geometriske verden.
 Tilhørende: Robert Nielsen, 8b Geometribog Indeholdende de vigtigste og mest basale begreber i den geometriske verden. 1 Polygoner. 1.1 Generelt om polygoner. Et polygon er en figur bestående af mere end
Tilhørende: Robert Nielsen, 8b Geometribog Indeholdende de vigtigste og mest basale begreber i den geometriske verden. 1 Polygoner. 1.1 Generelt om polygoner. Et polygon er en figur bestående af mere end
VIA UNIVERSITY COLLEGE. Building Tomorrow. Earthship
 VIA UNIVERSITY COLLEGE Building Tomorrow Earthship Afgangsprojekt,. Forår 2012 Landmålingsopgaver i forbindelse med etablering af Earthship hus. Her udføres situationsopmåling, nivellement, skelkonstatering
VIA UNIVERSITY COLLEGE Building Tomorrow Earthship Afgangsprojekt,. Forår 2012 Landmålingsopgaver i forbindelse med etablering af Earthship hus. Her udføres situationsopmåling, nivellement, skelkonstatering
Kalundborg Kommune Kontrolopmåling Rekvirent. Rådgiver. Kalundborg Kommune Plan Byg og Miljø Højvangen Svebølle
 Rekvirent Kalundborg Kommune Plan Byg og Miljø Højvangen 9 4470 Svebølle att. Michael Tranekjær Jensen Rådgiver Orbicon Leif Hansen A/S Ringstedvej 4000 Roskilde Telefon 46 30 03 10 E-mail fanm@orbicon.dk
Rekvirent Kalundborg Kommune Plan Byg og Miljø Højvangen 9 4470 Svebølle att. Michael Tranekjær Jensen Rådgiver Orbicon Leif Hansen A/S Ringstedvej 4000 Roskilde Telefon 46 30 03 10 E-mail fanm@orbicon.dk
Lineære sammenhænge. Udgave 2. 2009 Karsten Juul
 Lineære sammenhænge Udgave 2 y = 0,5x 2,5 2009 Karsten Juul Dette hæfte er en fortsættelse af hæftet "Variabelsammenhænge, 2. udgave 2009". Indhold 1. Lineære sammenhænge, ligning og graf... 1 2. Lineær
Lineære sammenhænge Udgave 2 y = 0,5x 2,5 2009 Karsten Juul Dette hæfte er en fortsættelse af hæftet "Variabelsammenhænge, 2. udgave 2009". Indhold 1. Lineære sammenhænge, ligning og graf... 1 2. Lineær
Vektorer og lineær regression
 Vektorer og lineær regression Peter Harremoës Niels Brock April 03 Planproduktet Vi har set, at man kan gange en vektor med et tal Et oplagt spørgsmål er, om man også kan gange to vektorer med hinanden
Vektorer og lineær regression Peter Harremoës Niels Brock April 03 Planproduktet Vi har set, at man kan gange en vektor med et tal Et oplagt spørgsmål er, om man også kan gange to vektorer med hinanden
Det teknisk-naturvidenskabelige basisår Matematik 1A, Efterår 2005, Hold 3 Prøveopgave B
 Det teknisk-naturvidenskabelige basisår Matematik 1A, Efterår 2005, Hold 3 Opgaven består af fire dele, hver med en række spørgsmål, efterfulgt af en liste af teorispørgsmål. I alle opgavespørgsmålene
Det teknisk-naturvidenskabelige basisår Matematik 1A, Efterår 2005, Hold 3 Opgaven består af fire dele, hver med en række spørgsmål, efterfulgt af en liste af teorispørgsmål. I alle opgavespørgsmålene
Matematik A 5 timers skriftlig prøve
 Højere Teknisk Eksamen august 2009 HTX092-MAA Matematik A 5 timers skriftlig prøve Undervisningsministeriet Fredag den 28. august 2009 kl. 9.00-14.00 Side 1 af 9 sider Matematik A 2009 Prøvens varighed
Højere Teknisk Eksamen august 2009 HTX092-MAA Matematik A 5 timers skriftlig prøve Undervisningsministeriet Fredag den 28. august 2009 kl. 9.00-14.00 Side 1 af 9 sider Matematik A 2009 Prøvens varighed
Opgave 1 Til denne opgave anvendes bilag 1.
 Opgave 1 Til denne opgave anvendes bilag 1. a) Undersøg figur 1. Mål og noter vinklerne Mål og noter længderne b) Undersøg figur 2. Mål og noter vinklerne Mål og noter længderne c) Undersøg figur 3. Mål
Opgave 1 Til denne opgave anvendes bilag 1. a) Undersøg figur 1. Mål og noter vinklerne Mål og noter længderne b) Undersøg figur 2. Mål og noter vinklerne Mål og noter længderne c) Undersøg figur 3. Mål
Vektorer og lineær regression. Peter Harremoës Niels Brock
 Vektorer og lineær regression Peter Harremoës Niels Brock April 2013 1 Planproduktet Vi har set, at man kan gange en vektor med et tal. Et oplagt spørgsmål er, om man også kan gange to vektorer med hinanden.
Vektorer og lineær regression Peter Harremoës Niels Brock April 2013 1 Planproduktet Vi har set, at man kan gange en vektor med et tal. Et oplagt spørgsmål er, om man også kan gange to vektorer med hinanden.
VIBORG KOMMUNE OPMÅLING AF TJELE Å
 VIBORG KOMMUNE OPMÅLING AF TJELE Å Rekvirent Viborg Kommune att. Rolf Christiansen Natur og Vand Prinsens Allé 5 8800 Viborg 87 87 55 55 roc@viborg.dk Rådgiver Orbicon A/S Jens Juuls Vej 16 8260 Viby J
VIBORG KOMMUNE OPMÅLING AF TJELE Å Rekvirent Viborg Kommune att. Rolf Christiansen Natur og Vand Prinsens Allé 5 8800 Viborg 87 87 55 55 roc@viborg.dk Rådgiver Orbicon A/S Jens Juuls Vej 16 8260 Viby J
Foreløbig udgave af læringsmål til: Kapitel 1 Regn med store tal Fælles Mål Læringsmål Forslag til tegn på læring
 Foreløbig udgave af læringsmål til: Kapitel 1 Regn med store tal Fælles Mål Læringsmål Forslag til tegn på læring udføre beregninger med de fire regningsarter inden for naturlige tal, herunder beregninger
Foreløbig udgave af læringsmål til: Kapitel 1 Regn med store tal Fælles Mål Læringsmål Forslag til tegn på læring udføre beregninger med de fire regningsarter inden for naturlige tal, herunder beregninger
Skråplan. Esben Bork Hansen Amanda Larssen Martin Sven Qvistgaard Christensen. 2. december 2008
 Skråplan Esben Bork Hansen Amanda Larssen Martin Sven Qvistgaard Christensen 2. december 2008 1 Indhold 1 Formål 3 2 Forsøg 3 2.1 materialer............................... 3 2.2 Opstilling...............................
Skråplan Esben Bork Hansen Amanda Larssen Martin Sven Qvistgaard Christensen 2. december 2008 1 Indhold 1 Formål 3 2 Forsøg 3 2.1 materialer............................... 3 2.2 Opstilling...............................
Laserscanning - nøjagtighed ved sammenknytning
 Laserscanning - nøjagtighed ved sammenknytning Landinspektøruddannelsen Afgangsprojekt 2005 Aalborg Universitet Aalborg Universitet Landinspektøruddannelsen 10. semester Titel: Laserscanning nøjagtighed
Laserscanning - nøjagtighed ved sammenknytning Landinspektøruddannelsen Afgangsprojekt 2005 Aalborg Universitet Aalborg Universitet Landinspektøruddannelsen 10. semester Titel: Laserscanning nøjagtighed
C) Perspektiv jeres kommunes resultater vha. jeres svar på spørgsmål b1 og b2.
 Perspektiv jeres kommunes resultater vha. jeres svar på spørgsmål b1 og b2.") C) Perspektiv jeres kommunes resultater vha. jeres svar på spørgsmål b1 og b. 5.000 4.800 4.600 4.400 4.00 4.000 3.800 3.600 3.400 3.00 3.000 1.19% 14.9% 7.38% 40.48% 53.57% 66.67% 79.76% 9.86% 010 011
C) Perspektiv jeres kommunes resultater vha. jeres svar på spørgsmål b1 og b. 5.000 4.800 4.600 4.400 4.00 4.000 3.800 3.600 3.400 3.00 3.000 1.19% 14.9% 7.38% 40.48% 53.57% 66.67% 79.76% 9.86% 010 011
Eksponentielle sammenhænge
 Eksponentielle sammenhænge Udgave 009 Karsten Juul Dette hæfte er en fortsættelse af hæftet "Lineære sammenhænge, udgave 009" Indhold 1 Eksponentielle sammenhænge, ligning og graf 1 Procent 7 3 Hvad fortæller
Eksponentielle sammenhænge Udgave 009 Karsten Juul Dette hæfte er en fortsættelse af hæftet "Lineære sammenhænge, udgave 009" Indhold 1 Eksponentielle sammenhænge, ligning og graf 1 Procent 7 3 Hvad fortæller
Kompendium i faget. Matematik. Tømrerafdelingen. 2. Hovedforløb. Y = ax 2 + bx + c. (x,y) Svendborg Erhvervsskole Tømrerafdelingen Niels Mark Aagaard
 Svendborg Erhvervsskole Tømrerafdelingen Niels Mark Aagaard") Kompendium i faget Matematik Tømrerafdelingen 2. Hovedforløb. Y Y = ax 2 + bx + c (x,y) X Svendborg Erhvervsskole Tømrerafdelingen Niels Mark Aagaard Indholdsfortegnelse for H2: Undervisningens indhold...
Kompendium i faget Matematik Tømrerafdelingen 2. Hovedforløb. Y Y = ax 2 + bx + c (x,y) X Svendborg Erhvervsskole Tømrerafdelingen Niels Mark Aagaard Indholdsfortegnelse for H2: Undervisningens indhold...
Matlab script - placering af kran
 Matlab script - placering af kran 1 Til at beregne den ideelle placering af kranen hos MSK, er der gjort brug af et matlab script. Igennem dette kapitel vil opbygningen af dette script blive gennemgået.
Matlab script - placering af kran 1 Til at beregne den ideelle placering af kranen hos MSK, er der gjort brug af et matlab script. Igennem dette kapitel vil opbygningen af dette script blive gennemgået.
Grupperede observationer et eksempel. (begreber fra MatC genopfriskes og varians og spredning indføres)
") Grupperede observationer et eksempel. (begreber fra MatC genopfriskes og varians og spredning indføres) Til Gribskovløbet 006 gennemførte 118 kvinder 1,4 km distancen. Fordelingen af kvindernes løbstider
Grupperede observationer et eksempel. (begreber fra MatC genopfriskes og varians og spredning indføres) Til Gribskovløbet 006 gennemførte 118 kvinder 1,4 km distancen. Fordelingen af kvindernes løbstider
Focus 8 med Survey PRO Betjeningsvejledning
 Focus 8 med Survey PRO Betjeningsvejledning 1. Åbn Survey PRO Når instrumentet er tændt, klik på Survey PRO-ikonet. 2. Indstil libelle Indstil libellen, så de to tal er så tæt på nul som muligt. Drej på
Focus 8 med Survey PRO Betjeningsvejledning 1. Åbn Survey PRO Når instrumentet er tændt, klik på Survey PRO-ikonet. 2. Indstil libelle Indstil libellen, så de to tal er så tæt på nul som muligt. Drej på
Landmålingens fejlteori - Sandsynlighedsregning - Lektion 1
 Landmålingens fejlteori Sandsynlighedsregning Lektion 1 - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf10 Institut for Matematiske Fag Aalborg Universitet 23. april 2009 1/28 Landmålingens
Landmålingens fejlteori Sandsynlighedsregning Lektion 1 - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf10 Institut for Matematiske Fag Aalborg Universitet 23. april 2009 1/28 Landmålingens
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester
 Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester") Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester LCG-2 Introduktion til GPS 1. Observationsteknikker og GPS-koncepter 2. Absolut positionering baseret på
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester LCG-2 Introduktion til GPS 1. Observationsteknikker og GPS-koncepter 2. Absolut positionering baseret på
Epidemiologi og biostatistik. Uge 3, torsdag. Erik Parner, Institut for Biostatistik. Regressionsanalyse
 Epidemiologi og biostatistik. Uge, torsdag. Erik Parner, Institut for Biostatistik. Lineær regressionsanalyse - Simpel lineær regression - Multipel lineær regression Regressionsanalyse Regressionsanalyser
Epidemiologi og biostatistik. Uge, torsdag. Erik Parner, Institut for Biostatistik. Lineær regressionsanalyse - Simpel lineær regression - Multipel lineær regression Regressionsanalyse Regressionsanalyser
Matematisk modellering og numeriske metoder. Lektion 16
 Matematisk modellering og numeriske metoder Lektion 16 Morten Grud Rasmussen 6. november, 2013 1 Interpolation [Bogens afsnit 19.3 side 805] 1.1 Interpolationspolynomier Enhver kontinuert funktion f på
Matematisk modellering og numeriske metoder Lektion 16 Morten Grud Rasmussen 6. november, 2013 1 Interpolation [Bogens afsnit 19.3 side 805] 1.1 Interpolationspolynomier Enhver kontinuert funktion f på
Tror du Jorden er flad? Erik Wirring Landinspektørfirmaet LE34
 Tror du Jorden er flad? Erik Wirring Landinspektørfirmaet LE34 (ew@le34.dk) https://twitter.com/flatearthorg?lang=da Verden som vi ser på den til dagligt i vores CAD system ( The Flat Earth made at
Tror du Jorden er flad? Erik Wirring Landinspektørfirmaet LE34 (ew@le34.dk) https://twitter.com/flatearthorg?lang=da Verden som vi ser på den til dagligt i vores CAD system ( The Flat Earth made at
brikkerne til regning & matematik statistik preben bernitt
 brikkerne til regning & matematik statistik 2+ preben bernitt brikkerne til regning & matematik statistik 2+ 1. udgave som E-bog ISBN: 978-87-92488-33-6 2009 by bernitt-matematik.dk Kopiering af denne
brikkerne til regning & matematik statistik 2+ preben bernitt brikkerne til regning & matematik statistik 2+ 1. udgave som E-bog ISBN: 978-87-92488-33-6 2009 by bernitt-matematik.dk Kopiering af denne
5 spørgsmål om koordinatsystemer du ville ønske, du aldrig havde stillet! Erik Wirring Landinspektørfirmaet LE34. (ew@le34.dk)
") 5 spørgsmål om koordinatsystemer du ville ønske, du aldrig havde stillet! Erik Wirring Landinspektørfirmaet LE34 (ew@le34.dk) 5 spørgsmål om koordinatsystemer du vil ønske du aldrig havde stillet! 1. Hvorfor
5 spørgsmål om koordinatsystemer du ville ønske, du aldrig havde stillet! Erik Wirring Landinspektørfirmaet LE34 (ew@le34.dk) 5 spørgsmål om koordinatsystemer du vil ønske du aldrig havde stillet! 1. Hvorfor
Kapitel 13 Reliabilitet og enighed
 Kapitel 13 Reliabilitet og enighed Peter Tibert Stoltze stat@peterstoltze.dk Elementær statistik F2011 Version 11. april 2011 1 / 23 Indledning En observation er sammensat af en sand værdi og en målefejl
Kapitel 13 Reliabilitet og enighed Peter Tibert Stoltze stat@peterstoltze.dk Elementær statistik F2011 Version 11. april 2011 1 / 23 Indledning En observation er sammensat af en sand værdi og en målefejl
Lavet af Ellen, Sophie, Laura Anna, Mads, Kristian og Mathias Fysikrapport blide forsøg Rapport 6, skråt kast med blide Formål Formålet med f
 Rapport 6, skråt kast med blide Formål Formålet med forsøget er at undersøge det skrå kast, bl.a. med fokus på starthastighed, elevation og kastevidde. Teori Her følger der teori over det skrå kast Bevægelse
Rapport 6, skråt kast med blide Formål Formålet med forsøget er at undersøge det skrå kast, bl.a. med fokus på starthastighed, elevation og kastevidde. Teori Her følger der teori over det skrå kast Bevægelse
Uge 43 I Teoretisk Statistik, 21. oktober Forudsigelser
 Uge 43 I Teoretisk Statistik,. oktober 3 Simpel lineær regressionsanalyse Forudsigelser Fortolkning af regressionsmodellen Ekstreme observationer Transformationer Sammenligning af to regressionslinier
Uge 43 I Teoretisk Statistik,. oktober 3 Simpel lineær regressionsanalyse Forudsigelser Fortolkning af regressionsmodellen Ekstreme observationer Transformationer Sammenligning af to regressionslinier
Landmålingens fejlteori - Repetition - Kontinuerte stokastiske variable - Lektion 3
 Landmålingens fejlteori Repetition - Kontinuerte stokastiske variable Lektion 4 - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf10 Institut for Matematiske Fag Aalborg Universitet 29. april
Landmålingens fejlteori Repetition - Kontinuerte stokastiske variable Lektion 4 - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf10 Institut for Matematiske Fag Aalborg Universitet 29. april
Matematik A og Informationsteknologi B
 Matematik A og Informationsteknologi B Projektopgave 2 Eksponentielle modeller Benjamin Andreas Olander Christiansen Jens Werner Nielsen Klasse 2.4 6. december 2010 Vejledere: Jørn Christian Bendtsen og
Matematik A og Informationsteknologi B Projektopgave 2 Eksponentielle modeller Benjamin Andreas Olander Christiansen Jens Werner Nielsen Klasse 2.4 6. december 2010 Vejledere: Jørn Christian Bendtsen og
Referencelaboratoriet for måling af emissioner til luften
 Referencelaboratoriet for måling af emissioner til luften Rapport nr.: 77 Titel Hvordan skal forekomsten af outliers på lugtmålinger vurderes? Undertitel - Forfatter(e) Arne Oxbøl Arbejdet udført, år 2015
Referencelaboratoriet for måling af emissioner til luften Rapport nr.: 77 Titel Hvordan skal forekomsten af outliers på lugtmålinger vurderes? Undertitel - Forfatter(e) Arne Oxbøl Arbejdet udført, år 2015
SILKEBORG KOMMUNE FORÆLDRETILFREDSHEDSUNDERSØGELSE 2018 SKOLE OG SFO
 SILKEBORG KOMMUNE FORÆLDRETILFREDSHEDSUNDERSØGELSE 2018 SKOLE OG SFO 1 INDHOLD Afsnit 01 Introduktion Side 03 Afsnit 02 Sammenfatning Side 05 Afsnit 03 Skoleresultater Side 07 Afsnit 04 SFO-resultater
SILKEBORG KOMMUNE FORÆLDRETILFREDSHEDSUNDERSØGELSE 2018 SKOLE OG SFO 1 INDHOLD Afsnit 01 Introduktion Side 03 Afsnit 02 Sammenfatning Side 05 Afsnit 03 Skoleresultater Side 07 Afsnit 04 SFO-resultater
Definition: Normalfordelingen. siges at være normalfordelt med middelværdi µ og varians σ 2, hvor µ og σ er reelle tal og σ > 0.
 Landmålingens fejlteori Lektion 2 Transformation af stokastiske variable - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf12 Institut for Matematiske Fag Aalborg Universitet Repetition:
Landmålingens fejlteori Lektion 2 Transformation af stokastiske variable - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf12 Institut for Matematiske Fag Aalborg Universitet Repetition: