Brugermanual. Robot: UR5 Euromap67
|
|
|
- Sidsel Toft
- 8 år siden
- Visninger:
Transkript
1 Brugermanual Robot: UR5 Euromap67
2 2 UR5

3 Indhold 1 Kom godt i gang Introduktion Robotten Programmer Sikkerhedsvurdering Tænd og sluk Tænding for kontrollerskabet Tænding for robotten Initialisering af robotten Slukning for robotten Slukning for kontrollerskabet Quick start, trin for trin Monteringsvejledning Robottens arbejdsradius Montering af robotten Montering af værktøj Montering af kontrollerskabet Montering af programmeringskonsollen Tilslutning af robotkabel Tilslutning af lysnetkabel Elektrisk interface Introduktion Vigtige meddelelser Sikkerhedsinterfacet Nødstop-interfacet Beskyttelsesinterfacet Automatisk fortsættelse efter beskyttelsesstop Kontroller I/O Digitale outputs Digitale inputs Analoge udgange Analoge inputs Værktøj I/O Digitale outputs Digitale inputs Analoge inputs Sikkerhed Introduktion Lovpligtig dokumentation Risikovurdering

4 Indhold 3.4 Nødsituationer Garantier Produktgaranti Ansvarsfraskrivelse Inkorporeringserklæring Introduktion Produktfabrikant Person bemyndiget til at udarbejde den relevante tekniske dokumentation Beskrivelse og identifikation af produktet Væsentlige krav Nationale myndigheders kontaktinformation Vigtig information Sted og dato for erklæring Den bemyndigede persons identitet og underskrift A Euromap67-interface 41 A.1 Introduktion A.1.1 Euromap67-standard A.1.2 CE A.2 Robot og IMM-integration A.2.1 Nødstop og sikkerhedsstop A.2.2 Tilslutning af et MAF-lysværn A.2.3 Montering af robot og værktøj A.2.4 Brug af robotten uden IMM A.2.5 Konvertering af euromap12 til euromap A.3 GUI A.3.1 Euromap67-programskabelon A.3.2 I/O-overblik og fejlfinding A.3.3 Funktionalitet i programstrukturen A.3.4 I/O-handling og vent A.4 Installation og afinstallation af interfacet A.4.1 Installation A.4.2 Afinstallation A.5 Elektriske karakteristika A.5.1 MAF-lysværnsinterface A.5.2 Nødstop, sikkerhedsudstyr og MAF-signaler A.5.3 Digitale inputs A.5.4 Digitale outputs B Certificeringer 55 4 UR5


5 Kapitel 1 Kom godt i gang 1.1 Introduktion Tillykke med købet af din nye Universal Robot, UR5. Robotten er en maskine, der kan programmeres til at bevæge et værktøj og kommunikere med andre maskiner ved hjælp af elektriske signaler. Med vores patenterede programmeringsinterface, PolyScope, er det nemt at programmere robotten til at bevæge værktøjet langs en ønsket bane. PolyScope er beskrevet i PolyScope-manualen. Læseren af denne manual forventes at være teknisk minded, at være fortrolig med de almene grundlæggende begreber for programmering, at være i stand til at forbinde en ledning til en skrueterminal, og være i stand til at bore hul i en metalplade. Ingen særlig viden om robotter, hverken i almindelighed eller til Universal Robots er påkrævet. Resten af dette kapitel er en appetitvækker til at komme i gang med robotten. 5

6 1.1. Introduktion Robotten Robotten i sig selv er en arm bestående af ekstruderede aluminiumsrør og led. Leddene kaldes A:Base, B:Skulder, C:Albue og D,E,F:Håndled 1,2,3. Basen er der, hvor robotten monteres, og i den anden ende (Håndled 3) sidder robottens værktøj. Ved at koordinere bevægelsen for hvert af leddene kan robotten frit bevæge sit værktøj rundt, med undtagelse af området direkte over og under robotten og selvfølgelig med begrænsning i robottens rækkevidde (850mm fra midten af basen) Programmer Et program er en liste af kommandoer, der fortæller robotten, hvad den skal gøre. Brugergrænsefladen PolyScope, der beskrives i PolyScope-manualen, gør det muligt for folk med begrænset programmeringserfaring at programmere robotten. For de fleste opgaver kan programmeringen udføres udelukkende ved hjælp af touch-panelet, uden at indtaste nogen kryptiske kommandoer. Da værktøjets bevægelse er så vigtig en del af et robot-program, er måden at vise robotten, hvordan den skal bevæge sig, afgørende. I PolyScope er værktøjets bevægelser givet ved hjælp af serier af viapunkter. Et viapunkt er en position i robottens arbejdsområde. Viapunkter Et viapunkt er en position i robottens arbejdsområde. Et viapunkt kan angives ved at flytte robotten til en bestemt position eller kan beregnes ved hjælp af software. Robotten udfører en opgave ved at bevæge sig gennem en sekvens af viapunkter. Mange forskellige indstillinger, for hvordan robotten bevæger sig mellem viapunkter, kan laves i programmet. Definere viapunkter, flytte robotten Den nemmeste måde at definere et viapunkt på, er at flytte robotten til den ønskede position. Dette kan gøres på to måder: 1) Ved blot at trække i robotten, mens du trykker på knappen Indlær på skærmen (se PolyScope-manualen). 2) Ved at bruge den trykfølsomme skærm til at køre værktøjet lineært eller til at køre hvert led individuelt. Overgange. Robotten stopper som standard ved hvert viapunkt. Ved at lade robotten beslutte, hvordan den nærmer sig et viapunkt, kan man køre gennem den ønskede sti hurtigere uden at stoppe. Denne mulighed opnås ved at sætte en overgangsradius for viapunktet, der betyder, at når robotten kommer inden for en vis afstand af viapunktet, kan den beslutte at afvige fra den vej. En overgangsradius på 5-10 cm giver som regel gode resultater. 6 UR5
. 1.1.2 Programmer Et program er en liste af kommandoer, der fortæller robotten, hvad den skal gøre.")
7 1.2. Tænd og sluk Funktioner Ud over at bevæge sig gennem viapunkter, kan programmet sende I/O-signaler til andre maskiner på visse punkter i robottens bane, og udføre kommandoer som hvis..så og Gentag, baseret på variable og I/O-signaler Sikkerhedsvurdering Robotten er en maskine, og som sådan er en sikkerhedsvurdering påkrævet for enhver installation af robotten. Kapitel 3.1 beskriver, hvordan man udfører en sikkerhedsvurdering. 1.2 Tænd og sluk Hvordan man tænder og slukker de forskellige dele af robotsystemet, beskrives i de følgende underafsnit Tænding for kontrollerskabet Kontrollerskabet tændes ved at trykke på ON-knappen forrest på kontrollerskabet. Når kontrollerskabet er tændt, vises en masse tekst på skærmen. Efter ca. 20 sekunder, kommer Universal Robots logo til syne, med teksten Indlæser. Efter godt 40 sekunder vises nogle få knapper på skærmen, og en Pop op tvinger brugeren til at gå til initialiseringsskærmen Tænding for robotten Robotten kan tændes, hvis kontrollerskabet er tændt, og ingen nødstopknapper er aktiveret. Robotten tændes fra initialiseringsskærmen ved at trykke på knappen ON på skærmen og derefter på Start. Når den tændes, høres en lyd, idet bremserne låser op. Når robotten er tændt, skal den initialiseres, før den kan begynde at udføre arbejdet Initialisering af robotten Når der er strøm på robotten, skal hvert af robottens led finde sin nøjagtige position. For at gøre det skal leddene bevæge sig. Hvor meget bevægelse der er nødvendig, afhænger af leddenes position og type. Små led skal bevæge sig mellem 22,5 og 45, store led skal bevæge sig halvt så meget, og rotationsretningen er ikke vigtig. Initialiseringsskærmen, der vises i figur 1.1, giver adgang til manuel og semi-automatisk kørsel af robotleddene. Robotten kan ikke automatisk undgå kollision med sig selv eller omgivelserne under denne proces. Derfor bør man udvise forsigtighed. Med knappen Auto næsten øverst på skærmen køres alle led indtil de er klar. Når den slippes og trykkes igen, ændrer alle led kørselsretning. Knappen Manuel tillader manuel kørsel af hvert led. En mere detaljeret beskrivelse af initialiseringsskærmen findes i PolyScopemanualen. 7 UR5


8 1.3. Quick start, trin for trin Figur 1.1: Initialiseringsskærmen Slukning for robotten Strømmen til robotten kan slukkes ved at trykke på OFF-knappen på initialiseringsskærmen. De fleste brugere behøver ikke at bruge denne funktion, da robotten slukker automatisk, når kontrollerskabet slukkes Slukning for kontrollerskabet Systemet slukkes ved at holde på den grønne power-knap på skærmen eller ved at bruge Sluk-knappen på velkomst-skærmen. Hvis man lukker ned ved at trække strømkablet ud af stikkontakten, kan man ødelægge robottens filsystem, hvilket kan resultere i funktionsfejl. 1.3 Quick start, trin for trin For hurtigt at sætte robotten skal følgende trin udføres: 1. Pak robotten og kontrollerskabet ud. 2. Monter robotten på en solid overflade. 3. Placer kontrollerskabet på sin fod. 4. Sæt robotkablet ind i stikket i bunden af kontrollerskabet. 5. Sæt kontrollerskabets stik i stikkontakten. 6. Tryk på nødstopknappen på forsiden af programmeringskonsollen. 7. Tryk på programmeringskonsollens power-knap. 8. Vent et øjeblik, mens systemet starter op og viser tekst på skærmen. 8 UR5

9 1.3. Quick start, trin for trin 9. Når systemet er klar, vises en pop op på skærmen, der angiver, at nødstopknappen er trykket ned. 10. Rør ved OK-knappen i pop op-vinduet. 11. Lås nødstopknapperne op. Robottens status ændres fra nødstoppet til robot slukket. 12. Tryk på On-knappen på touch-skærmen. Vent et par sekunder. 13. Tryk på Start-knappen på touch-skærmen. Robotten laver en lyd og bevæger sig lidt, mens bremserne låses op. 14. Tryk på de blå pile, og flyt leddene rundt, indtil hvert lys i højre side af skærmen bliver grønt. Vær omhyggelig med ikke at køre robotten ind i sig selv eller i noget andet. 15. Alle led er nu OK. Et tryk på OK-knappen frembringer Velkomstskærmen. 16. Tryk på knappen PROGRAMMER Robot, og vælg Tomt program. 17. Tryk på knappen Næste (nederst til højre), så linjen <empty> vælges i træstrukturen på venstre side af skærmen. 18. Gå til Struktur-fanebladet. 19. Tryk på Bevæg-knappen. 20. Gå til Kommando-fanebladet. 21. Tryk på Næste-knappen, for at gå til Viapunkt-indstillinger. 22. Tryk på knappen Sæt dette viapunkt ved siden af "?"-billedet. 23. På Bevæg-skærmen kan du flytte robotten ved at trykke på de forskellige blå pile eller ved at holde Indlær-knappen bag på programmeringskonsollen nede, mens du trækker robotarmen. 24. Tryk på OK. 25. Tryk på Tilføj viapunkt før. 26. Tryk på knappen Sæt dette viapunkt ved siden af "?"-billedet. 27. På Bevæg-skærmen kan du flytte robotten ved at trykke på de forskellige blå pile eller ved at holde Indlær-knappen nede, mens du trækker robotarmen rundt. 28. Tryk på OK. 29. Dit program er klar. Robotten vil bevæge sig mellem de to punkter, når du trykker på Afspil -symbolet. Udvis agtpågivenhed, vær evt. klar til at trykke på nødstop-knappen, og tryk på Afspil. 30. Tillykke! Du har nu produceret dit første robotprogram, der flytter robotten mellem to givne positioner. Husk, at du skal foretage en risikovurdering og evt. forbedre den samlede sikkerhedstilstand, før robotten virkelig skal i arbejde. 9 UR5

10 1.4. Monteringsvejledning Forfra På skrå Figur 1.2: Robottens arbejdsradius. Robotten kan arbejde i en omtrentlig sfære (Ø170 cm) rundt om basen, bortset fra en cylindrisk volumen direkte over og direkte under robotbasen. 1.4 Monteringsvejledning Robotten består primært af seks robotled og to aluminiumsrør, der forbinder robottens base med robottens værktøj. Robotten er bygget således, at værktøjet kan omsættes og roteres inden for robottens arbejdsområde. Det følgende underafsnit beskriver det grundlæggende i at montere robottens forskellige dele Robottens arbejdsradius UR5-robottens arbejdsradius er 850 mm fra baseleddet. Arbejdsområdet vises i figur 1.2. Det er vigtigt at tage hensyn til den cylindriske volumen direkte over og direkte under robotbasen, når en plads til montering af robotten vælges. Det bør undgås at flytte værktøjet tæt på den cylindriske volumen, fordi det vil få robotleddene til at bevæge sig hurtigt, selvom værktøjet bevæger sig langsomt Montering af robotten Robotten monteres med 4 M8-bolte gennem de 4 8.5mm huller i robottens base. Hvis der ønskes en meget nøjagtig repositionering af robotten, findes der to Ø8 huller til det, der kan bruges med en stift. En nøjagtig basemodpart kan også købes som tilbehør. Figur 1.3 viser, hvor hullerne skal bores og skruerne isættes Montering af værktøj Robottens værktøjsflange har fire huller til fastgørelse af værktøj. En tegning af værktøjsflangen vises i figur Montering af kontrollerskabet Kontrollerskabet kan hænges op på en væg, eller det kan placeres på jorden. En frirum på 50 mm på hver side giver tilstrækkelig luftgennemstrømning. 10 UR5

11 Monteringsvejledning Surface on which the robot is fitted. It should be flat within 0.05mm 5 ±1 (2) Outer diameter of robot mounting flange 8.5 OR M8 12 (4) +0,015-0,010 (2) 8 ±0,5 90 ±0,5 (4) 120 ±0,5 ±0, Cable exit 132 ±0,5 149 Figur 1.3: Huller til at montere robotten, skala 1:1. Brug 4 M8-bolte. Alle mål er i mm. 11 UR5

12 1.4. Monteringsvejledning A +0, (H7) Lumberg RKMV connector M6 6,0 (x4) +0,025 31,5 0 (H7) A ,05 (h8) 75 19,5 33 SECTION A-A 6 6,5 5 6,5 46, (x4) Figur 1.4: Værktøjsoutputflangen, ISO M6. Det er her, værktøjet monteres på robotten. Alle mål er i mm. 12 UR5

13 1.4. Monteringsvejledning Montering af programmeringskonsollen Programmeringskonsollen kan hænges på en væg eller på kontrollerskabet. Ekstra fittings kan købes Tilslutning af robotkabel Kablet fra robotten skal være sluttet til stikket på knappen på kontrollerskabet. Husk at sikre dig, at stikket er korrekt låst. Tilslutning og afbrydelse af robotkablet må kun ske, når strømmen til robotten slukkes Tilslutning af lysnetkabel Lysnetkablet fra kontrollerskabet har et standard IEC-stik i enden. Tilslut et landespecifikt lysnetstik eller kabel til IEC-stik. Hvis strømkapaciteten for det specifikke stik er utilstrækkelig eller en mere permanent løsning foretrækkes, skal kontrollerkassen forbindes direkte med ledning. Lysnetforsyningen skal som minimum udstyres med følgende: 1. Hovedsikring 2. Fejlstrømsafbryder. 3. Jordforbindelse. Specifikation for lysnetindgang er vist nedenfor. Parameter Min. Type Maks. Enhed Indgangsspænding V AC Ekstern lysnetsikring 8-16 A Indgangsfrekvens Hz Strøm ved standby - - 0,5 W Nominel driftstrøm W Brug den skruetilslutning, der er markeret med jordsymbol inde i kontrollerkassen, når spændingsudligning med andet maskineri er påkrævet. Bemærk: Det er teknisk muligt at bruge 110 V lysnetforsyning. Når robotten imidlertid bevæges ved høj hastighed eller høj acceleration, overskrider lysnetstrømmen den maksimale kapacitet, hvilket gør, at ledninger, stik og hovedsikringen overbelastes. Ventilatoren kører også ved lavere hastighed. 13 UR5

14 1.4. Monteringsvejledning 14 UR5

15 Kapitel 2 Elektrisk interface 2.1 Introduktion Robotten er en maskine, der kan programmeres til at flytte et værktøj rundt i robottens arbejdsområde. Ofte ønskes det at koordinere robottens bevægelser med maskiner i nærheden eller med udstyr på værktøjet. Den enkleste måde at opnå dette på er ofte ved hjælp af det elektriske interface. Der findes elektriske indgange/udgange (I/O) inde i kontrollerskabet og på robottens værktøjsflange. Dette kapitel forklarer, hvordan udstyr forbindes til disse I/O. Nogle I/O i kontrollerskabet er dedikeret til robottens nødstop-funktion, og andre I/O til generelle formål, kan forbindes til andre maskiner og andet udstyr. I/O til generelle formål kan styres direkte via I/O-fanebladet på den grafiske brugergrænseflade, som forklaret i PolyScope-manualen, eller via robotprogrammerne. For yderligere I/O kan Modbus-enheder tilføjes via det ekstra Ethernet-stik i kontrollerskabet. 2.2 Vigtige meddelelser Bemærk, at ifølge standarderne IEC og EN må kabler fra kontrollerskabet til andet maskinel og virksomhedsudstyr ikke være længere end 30 m, medmindre der udføres udvidede tests. Bemærk at der refereres til alle minus-forbindelser som GND, og at de forbindes til robottens skjold og kontrollerskabet. Alle nævnte GDN-forbindelser er dog kun til strøm og signalering. Ved PE (Protective Earth) bruges en af de to skrueforbindelser af M6-størrelse inde i kontrollerskabet. Hvis FE (Functional Earth) er nødvendig, skal en af M3-skruerne tæt på skrueterminalerne bruges. Bemærk, at i dette kapitel er alle uspecificerede spændings- og strømdata i DC. Det er generelt vigtigt at holde sikkerhedsinterfacets signaler adskilt fra de generelle I/O-interfacesignaler. Desuden bør sikkerhedsinterfacet aldrig tilsluttes en PLC, der ikke er en sikkerheds-plc med det korrekte sikkerhedsniveau. Hvis denne regel ikke følges, er det ikke muligt at opnå et højt sikkerhedsniveau, da en fejl i en generel I/O kan forhindre et sikkerhedsstopsignal i at resultere i et stop. 15

16 2.3. Sikkerhedsinterfacet 2.3 Sikkerhedsinterfacet TA TB TA TB E01 E02 E03 E04 TA TB A R 24V 24V DO0 DO1 DO2 DO3 DO4 DO5 DO6 DO7 24V 24V 24V 24V 24V 24V 24V 24V A1- A1+ AG AO1 EA EB EEA EEB 24V 24V GND GND SA SB A R GND GND GND GND GND GND GND GND GND GND DI0 DI1 DI2 DI3 DI4 DI5 DI6 DI7 A0- AO+ AG AO0 Inde i kontrollerskabet sidder et panel med skrueterminaler. Den yderste venstre del, vist med sort ovenfor, udgør sikkerhedsinterfacet. Sikkerhedsinterfacet kan bruges til at forbinde robotten til andre maskiner eller beskyttelsesudstyr for at sikre at robotten stopper i bestemte situationer. Sikkerhedsinterfacet består af to dele: Nødstop-interfacet og beskyttelsesstopinterfacet, nærmere beskrevet i de følgende afsnit. Nedenstående tabel opsummerer deres forskelle: Nødstop Beskyttelsesstop Robot stopper bevægelse Ja Ja Årsager Manuel Manuelle eller automatiske Programafvikling Stop Pauserer Bremser Aktive Ikke aktive Motoreffekt Off Begrænset Nulstil Manuel Automatisk eller manuel Brugsfrekvens Sjælden Alle cyklusser til sjælden Kræver ny initialisering Udløs kun bremser Nej EN/IEC og NFPA 79 Stopkategori 1 Stopkategori 2 Præstationsniveau ISO PLd ISO PLd Nødstop-interfacet [TA] Test udgang A [TB] Test udgang B [EO1] Nødstopudgangstilslutning 1 [EO2] Nødstopudgangstilslutning 2 [EO3] Nødstopudgangstilslutning 3 [EO4] Nødstopudgangstilslutning 4 [EA] Robot-nødstopindgang A (positiv) [EB] Robot-nødstopindgang B (negativ) [EEA] Ekstern nødstopindgang A (positiv) [EEB] Eksternt nødstop B (negativ) [24 V] +24V strømforsyning til sikkerhedsudstyr [GND] 0 V strømforsyning til sikkerhedsudstyr Nødstopinterfacet har to indgange, robot-nødstopindgangen og den eksterne nødstopindgang. Hver indgang er redundant for at overholde sikkerhedsperformanceniveauet d. Robotnødstop-interfacet stopper robotten og sætter nødstopudgangen, beregnet til brug af sikkerhedsudstyr i nærheden af robotten. Det eksterne nødstop vil også stoppe robotten, men påvirker ikke nødstoppets udgang og er alene beregnet på tilslutning til andre maskiner. 16 UR5

17 2.3. Sikkerhedsinterfacet Den simpleste nødstopkonfiguration TA TB TA TB E01 E02 E03 E04 EA EB EEA EEB Den simpleste konfiguration er at bruge den interne nødstopknap som eneste komponent til at generere et nødstop. Dette gøres som i konfigurationen vist ovenfor. Denne konfiguration er standard, når robotten forlader fabrikken, og derved er robotten klar til brug. Dog bør konfigurationen ændres, hvis det kræves af risikovurderingen. Tilslutning af en ekstern nødstopknap TA TB TA TB E01 E02 E03 E04 EA EB EEA EEB I næsten alle robotapplikationer er det påkrævet at tilslutte en eller flere eksterne nødstopknapper. Dette gøres nemt. Et eksempel på tilslutning af en ekstern knap er vist ovenfor. Tilslutning af nødstop til andre maskiner Når robotten anvendes sammen med andre elektromekaniske maskiner, er det ofte nødvendigt at etablere et fælles nødstopkredsløb. Dette sikrer, at operatøren ikke skal tænke på hvilken knap, der skal bruges, hvis en farlig situation opstår. Det vil også ofte være en fordel at synkronisere alle subfunktioner i en produktlinje, da et stop i kun en del af produktlinjen vil kunne føre til en farlig situation. Et eksempel med to UR-robotter der nødstopper hinanden er vist nedenfor. E01 E02 E03 E04 TA TB TA TB TA TB TA TB E01 E02 E03 E04 A B EA EB EEA EEB EA EB EEA EEB Herunder er vist et eksempel, hvor flere UR-robotter deler deres nødstopfunktion. Tilslut flere robotter, som robot nummer 2 er tilsluttet. Dette eksempel bruger 24 V, som fungerer med mange andre maskiner. Sørg for at overholde alle elektriske specifikationer, når UR-robotter deler nødstop med andet maskineri. 17 UR5

18 2.3. Sikkerhedsinterfacet TA TB TA TB E01 E02 E03 E04 TA TB TA TB E01 E02 E03 E04 TA TB TA TB E01 E02 E03 E04 EA EB EEA EEB 24V 24V GND GND EA EB EEA EEB EA EB EEA EEB Elektriske specifikationer Et forenklet internt skema over kredsløb vises nedenfor. Det er vigtigt at bemærke, at enhver kortslutning eller tabt forbindelse vil føre til sikkerhedsstop, så længe der kun opstår en fejl ad gangen. Svigt og unormal adfærd for relæer og strømforsyninger resulterer i en fejlmeddelelse i robottens log og forhindrer robotten i at tænde. TA TB TA TB EA EB EEA EEB EO1 EO2 EO3 EO4 PTC PTC V 12V Nedenfor: Specifikationer for nødstopinterfacet. Parameter Min. Type Maks. Enhed [TA-TB] Spænding V [TA-TB] Strøm (hvert output) ma [TA-TB] Strømbeskyttelse ma [EA-EB][EEA-EEB] Indgangsspænding V [EA-EB][EEA-EEB] Garanteret OFF, hvis V [EA-EB][EEA-EEB] Garanteret ON, hvis V [EA-EB][EEA-EEB] Garanteret OFF, hvis 0-3 ma [EA-EB][EEA-EEB] ON-strøm (10-30 V) 7-14 ma [EO1-EO2][EO3-EO4] Kontaktstrøm AC/DC 0,01-6 A [EO1-EO2][EO3-EO4] Kontaktspænding DC 5-50 V [EO1-EO2][EO3-EO4] Kontaktspænding AC V Bemærk, at antallet af sikkerhedskomponenter, og hvordan de bør anvendes, afhænger af risikovurderingen, der forklares i afsnit 3.1. Bemærk, at det er vigtigt at foretage regelmæssig kontrol af funktionaliteten for sikkerhedsstop for at sikre, at alle sikkerhedsstop-enheder fungerer korrekt. De to nødstopindgange EA-EB og EEA-EEB er potentielle indgange i overensstemmelse med IEC og EN , forureningsgrad 2, overspænding kategori II. Nødstopudgangene EO1-EO2-EO3-EO4 er relækontakter i overensstemmelse med IEC og EN , forureningsgrad 2, overspænding kategori III. 18 UR5

19 2.3. Sikkerhedsinterfacet Beskyttelsesinterfacet [TA] Test udgang A [TB] Test udgang B [SA] Beskyttelsesstop indgang A (positiv) [SB] Beskyttelsesstop indgang B (negativ) [A] Automatisk fortsættelse efter beskyttelsesstop [R] Reset beskyttelsesstop [24 V] +24V strømforsyning til sikkerhedsudstyr [GND] 0 V strømforsyning til sikkerhedsudstyr Beskyttelsesinterfacet bruges til at pausere robottens bevægelse på en sikker måde. Beskyttelsesinterfacet kan bruges til lysgitre, dørkontakter, sikkerheds- PLC er etc. Genoptagelsen efter et beskyttelsesstop kan ske automatisk eller kontrolleres via en trykknap, afhængig af konfigurationen. Hvis beskyttelsesinterfacet ikke bruges, skal automatisk reset-funktionalitet aktiveres som beskrevet i afsnit Tilslutning af dørkontakt TA TB A R 24V 24V GND GND SA SB A R Tilslutning af dørkontakt eller lignende gøres som vist ovenfor. Husk at bruge en reset-knap-konfiguration, hvis robotten ikke skal starte automatisk, når døren lukkes igen. Tilslutning af lysgitter TA TB A R 24V 24V GND GND SA SB A R 24V GND Ovenfor vises, hvordan et lysgitter tilsluttes. Det er også muligt at anvende et lysgitter i kategori 1 (ISO og EN 954-1), hvis risikovurderingen tillader det. Når du tilslutter et kategori 1-lysgitter, så brug TA og SA, og forbind derefter TB og SB med en ledning. Husk at bruge en reset-knapkonfiguration, så beskyttelsesstoppet låses. 19 UR5

20 2.3. Sikkerhedsinterfacet Tilslutning af reset-knap TA TB A R 24V 24V GND GND SA SB A R Ovenfor vises, hvordan en reset-knap tilsluttes. Reset-knappen må ikke være trykket ned permanent. Hvis reset-knappen sidder fast, genereres et beskyttelsesstop, og en fejlmeddelelse vises på log-skærmen Automatisk fortsættelse efter beskyttelsesstop TA TB A R 24V 24V GND GND SA SB A R Beskyttelsesinterfacet kan nulstille sig selv, når en beskyttelsesstophændelse er slut. Aktivering af automatisk reset-funktionalitet vises ovenfor. Denne konfiguration anbefales også, hvis beskyttelsesinterfacet ikke anvendes. Det anbefales dog ikke at bruge automatisk reset, hvis en reset-knap-konfiguration er mulig. Automatisk reset er beregnet til specielle installationer og installationer med andre maskiner. Elektriske specifikationer Til forståelse af beskyttelsesfunktionaliteten vises et forenklet internt skema af kredsløbet nedenfor. Enhver fejl i sikkerhedssystemet vil føre til et sikkerhedsstop af robotten, og en fejlmeddelelse vises på log-skærmen. 24V GND TA TB SA SB A R A R 24V PTC PTC V 12V UR5

21 2.4. Kontroller I/O Parameter Min. Type Maks. Enhed 24 V spændingstolerance -15% - +20% - Strøm tilgængelig fra 24 V strømforsyning - - 1,2 A Overbelastningsbeskyttelse - 1,4 - A [TA-TB][A ][R ] Spænding 10, ,5 V [TA-TB][A ][R ] Strøm ma [TA-TB][A ][R ] Strømbeskyttelse ma [SA-SB] Indgangsspænding V [SA-SB] Garanteret OFF, hvis V [SA-SB] Garanteret ON, hvis V [SA-SB] Garanteret OFF, hvis 0-3 ma [SA-SB] ON-strøm (10-30 V) 7-14 ma [A ][R ] Indgangsspænding V [A ][R ] Input garanteret OFF, hvis V [A ][R ] Input garanteret ON, hvis V [A ][R ] Garanteret OFF, hvis 0-5 ma [A ][R ] ON-strøm (10-30 V) 6-10 ma Beskyttelsesstopindgangen SA-SB er en potentiel indgang i overensstemmelse med IEC og EN , forureningsgrad 2, overspænding kategori II. Bemærk at de gule 24 V forbindelser får strøm fra den samme interne 24 V strømforsyning som 24 V forbindelserne for de normale I/O, og at maksimum på 1,2 A er for begge strømkilder tilsammen. 2.4 Kontroller I/O TA TB TA TB E01 E02 E03 E04 TA TB A R 24V 24V DO0 DO1 DO2 DO3 DO4 DO5 DO6 DO7 24V 24V 24V 24V 24V 24V 24V 24V A1- A1+ AG AO1 EA EB EEA EEB 24V 24V GND GND SA SB A R GND GND GND GND GND GND GND GND GND GND DI0 DI1 DI2 DI3 DI4 DI5 DI6 DI7 A0- AO+ AG AO0 Inde i kontrollerskabet er der et panel af skrueterminaler med forskellige I/O, som vist ovenfor. Længst til højre i panelet sidder de generelle I/O. [24 V] +24V strømtilslutning [GND] 0 V strømtilslutning [DOx] Digital udgang nummer x [DIx] Digital indgang nummer x [AOx] Analog udgang nummer x plus [AG] Analog udgang GND [Ax+] Analog indgang nummer x plus [Ax-] Analog indgang nummer x minus I/O-panelet i kontrollerskabet har 8 digitale og 2 analoge indgange, 8 digitale og 2 analoge udgange, og en indbygget 24 V strømforsyning. Digitale indgange og udgange er pnp-teknologi og konstrueret i overensstemmelse med IEC og EN V og GND kan bruges som indgang for I/Omodulet eller udgang som en 24 V strømforsyning. Når kontrollerskabet starter op, kontrollerer det, om spændingen er anvendt på 24 V forbindelsen fra en ekstern strømforsyning, og hvis ikke, slutter det automatisk til den interne 24 V strøm. 21 UR5
22 2.4. Kontroller I/O Elektriske specifikationer for den interne strømforsyning Parameter Min. Type Maks. Enhed Intern 24 V spændingstolerance -15% - +20% - Strøm fra intern 24 V forsyning - - 1,2 A Overbelastningsbeskyttelse - 1,4 - A Ekstern strømforsyningsspænding V Bemærk, at 24 V forbindelserne for beskyttelse (gul) får strøm fra den samme interne 24 V strømforsyning som 24 V forbindelserne for de normale I/O, og at maksimum på 1,2 A er for begge strømkilder tilsammen. Hvis 24 V strømforsyningen overbelastes, udskrives en fejlbesked på log-skærmen. Strømforsyningen vil automatisk forsøge at gendanne sig efter et par sekunder Digitale outputs Parameter Min. Type Maks. Enhed Strømkilde per output 0-2 A Strømkilde for alle udgange tilsammen 0-4 A Spænding falder, når ON 0-0,2 V Lækstrøm når OFF 0 0-0,1 ma Udgangene kan bruges til at styre udstyr direkte, f.eks. pneumatiske relæer eller til kommunikation med andre PLC systemer. Outputtene er konstruerede i overensstemmelse med alle tre typer digitale inputs defineret i IEC og EN og med alle krav for digitale outputs i de samme standarder. Alle digitale udgange kan deaktiveres automatisk, når et program er stoppet, ved at bruge afkrydsningsfeltet Altid lav ved programstop på I/O-skærmbilledet (se PolyScope-manualen). I denne tilstand er udgangen altid lav, når et program ikke kører. De digitale udgange er ikke strømbegrænsede, og overskridelse af specificerede data kan forårsage permanent skade. Det er dog ikke muligt at beskadige udgangene, hvis den interne 24 V strømforsyning er brugt på grund af sin strømbeskyttelse. Bemærk, at kontrollerskabet og metalskærmene er forbundet til GND. Send aldrig I/O-strøm gennem skærme eller jordforbindelser. De følgende underafsnit viser nogle enkle eksempler på mulig anvendelse af de digitale udgange. Belastning styret af digital udgang DO0 DO1 DO2 DO3 DO4 DO5 DO6 DO7 LOAD GND GND GND GND GND GND GND GND Dette eksempel viser, hvordan en belastning tændes. 22 UR5
23 2.4. Kontroller I/O Belastning styret af digital udgang, ekstern strøm 24V 24V 24V DO0 DO1 DO2 DO3 DO4 DO5 DO6 DO7 LOAD GND GND GND GND GND GND GND GND GND GND Hvis den tilgængelige strøm fra den interne strømforsyning ikke er nok, anvendes bare en ekstern strømforsyning, som vist ovenfor Digitale inputs Parameter Min. Type Maks. Enhed Indgangsspænding V Input garanteret OFF, hvis V Input garanteret ON, hvis V Garanteret OFF, hvis 0-5 ma ON-strøm (10-30 V) 6-10 ma De digitale indgange er implementeret som pnp, hvilket betyder at de er aktive, når der påføres spænding på dem. Indgangene kan bruges til at læse knapper, sensorer eller til kommunikation med andre PLC-systemer. Inputtene er kompatible med alle tre typer digitale inputs defineret i IEC og EN , hvilket betyder at de kan arbejde sammen med alle typer digitale outputs defineret i de samme standarder. Tekniske specifikationer for de digitale indgange er vist nedenfor. Digitalt input, simpel knap Eksemplet ovenfor viser, hvordan en simpel knap eller kontakt forbindes. Digital indgang, simpel knap, ekstern strøm DO7 24V 24V 24V 24V GND GND GND GND DI0 DI1 DI2 Button Illustrationen ovenfor viser, hvordan en knap tilsluttes ved hjælp af en ekstern strømforsyning. 23 UR5
24 2.4. Kontroller I/O Signalkommunikation med andre maskiner eller PLC er DO0 DO1 DO2 DO3 DO4 DO5 DO6 DO7 24V 24V 24V 24V 24V 24V 24V 24V A B DO0 DO1 DO2 DO3 DO4 DO5 DO6 DO7 24V 24V 24V 24V 24V 24V 24V 24V GND GND GND GND GND GND GND GND DI0 DI1 DI2 DI3 DI4 DI5 DI6 DI7 GND GND GND GND GND GND GND GND DI0 DI1 DI2 DI3 DI4 DI5 DI6 DI7 Ved behov for kommunikation med andre maskiner eller PLC er skal de bruge pnp teknologi. Husk at skabe en fælles GND-forbindelse mellem de forskellige interfaces. Et eksempel, hvor to UR-robotter (A og B) kommunikerer med hinanden, er vist ovenfor Analoge udgange Parameter Min. Type Maks. Enhed Gyldig outputspænding ved strømtilstand 0-10 V Gyldig outputspænding ved spændingstilstand ma Kortslutningsstrøm ved spændingstilstand ma Udgangsmodstand ved spændingstilstand ohm De analoge udgange kan sættes til både strømtilstand og spændingstilstand, hhv. i intervallet 4-20 ma og 0-10 V. For at illustrere hvor let det er at bruge analoge outputs, vises nogle enkle eksempler. Anvendelse af analoge outputs Dette er den almindelige og bedste måde at anvende analoge outputs på. Illustrationen viser en opsætning, hvor robotten styrer en aktuator som et transportbånd. Det bedste resultat opnås ved at anvende strømtilstand, fordi den er mere immun over for forstyrrende signaler. Anvendelse af de analoge outputs, ikke-differentielt signal 24 UR5
25 2.4. Kontroller I/O Hvis det kontrollerede udstyr ikke tager et differentielt input, kan en alternativ løsning laves som vist ovenfor. Denne løsning er ikke særlig god i forhold til støj og kan nemt hente forstyrrende signaler fra andre maskiner. Vær omhyggelig med ledningstilslutningen, og husk på, at forstyrrende signaler induceret ind i analoge outputs også kan være til stede på andre analoge I/O Analoge inputs Parameter Min. Type Maks. Enhed Indgangsspænding for fællestilstand V Indgangsspænding for differentialtilstand* V Differentiel indgangsmodstand kohm Indgangsmodstand for fællestilstand kohm Rate for fællestilstandsafvisning db De analoge inputs kan indstilles til fire forskellige spændingsområder, som er implementeret på forskellige måder og derfor kan have forskellige offsets og generere fejl. Den angivne indgangsspænding for differentialtilstand er kun gyldig med en spænding for fællestilstand på 0 V. For at gøre det klart, hvor let det er at bruge analoge udgange, er nogle enkle eksempler vist. Anvendelse af analoge indgange, differentielt spændingsinput Den enkleste måde at anvende analoge indgange på. Det viste udstyr, som kunne være en sensor, har et differentielt spændingsoutput. Anvendelse af analoge indgange, ikke-differentielt spændingsinput Hvis det ikke er muligt at opnå et differentieret signal fra det anvendte udstyr, kunne en løsning ligne opsætningen ovenfor. I modsætning til eksemplet med den ikke-differentielle analoge udgang i afsnit 2.4.3, vil denne løsning være næsten lige så god som de differentielle løsninger. 25 UR5
26 2.5. Værktøj I/O Anvendelse af analoge indgange, differentielt strøminput Når længere kabler benyttes, eller hvis det er et meget støjende miljø, er strømbaserede signaler at foretrække. Desuden leveres noget udstyr kun med strømudgang. For at bruge strøm som indgang, er en ekstern modstand nødvendig som vist ovenfor. Værdien af modstanden vil normalt være omkring 200 ohm, og det bedste resultat opnås, når modstanden er tæt på skrueterminalerne på kontrollerskabet. Bemærk, at tolerancen for modstand og ohm, der ændres på grund af temperaturen, skal lægges til fejlspecifikationerne for de analoge indgange. Anvendelse af analoge indgange, ikke-differentiel strømindgang Hvis udstyrets udgang er et ikke-differentielt strømsignal, skal en modstand bruges som vist ovenfor. Modstanden skal være omkring 200 ohm, og forholdet mellem spændingen på kontrollerens indgang og sensorens udgang er: Spænding = strøm x modstand Bemærk, at tolerancen for modstand og ohm, der ændres på grund af temperaturen, skal lægges til fejlspecifikationerne for de analoge indgange. 2.5 Værktøj I/O På robottens værktøj er der et lille stik med otte tilslutninger. 26 UR5
27 2.5. Værktøj I/O Farve Rød Grå Blå Pink Gul Grøn Hvid Brun Signal 0 V (GND) 0 V/12 V/24 V (POWER) Digital udgang 8 (DO8) Digital udgang 9 (DO9) Digital indgang 8 (DI8) Digital indgang 9 (DI9) Analog indgang 2 (AI2) Analog indgang 3 (AI3) Dette stik giver strøm og kontrolsignaler til gribere og sensorer, der er tilknyttet robotværktøjet. Stikket kan bruges til at reducere ledningsføringen mellem værktøjet og kontrollerskabet. Stikket er et standard Lumberg RSMEDG8, som passer med et kabel af typen RKMV Bemærk, at værktøjsflangen er forbundet til GND (det samme som den røde ledning). Specifikationer for den interne strømforsyning Parameter Min. Type Maks. Enhed Forsyningsspænding i 24V tilstand TBD 24 TBD V Forsyningsspænding i 12 V tilstand TBD 12 TBD V Forsyningsstrøm ved begge tilstande ma Kortslutningsbeskyttelse ma Kapacitiv belastning - - TBD uf Induktiv belastning - - TBD uh Den tilgængelige strømforsyning kan indstilles til enten 0 V, 12 V eller 24 V på I/Ofanebladet i den grafiske brugergrænseflade. Vær forsigtig, når du bruger 12 V, da eventuelle fejl kan forårsage skift af spænding til 24 V, som kan beskadige udstyret og endda forårsage brand. Det interne kontrolsystem vil generere en fejl til robottens log, hvis strømmen overskrider sin grænse. Værktøjets forskellige I/O beskrives i de følgende tre underafsnit Digitale outputs Parameter Min. Type Maks. Enhed Spænding når åben -0,5-26 V Spænding når lav 1 A - 0,05 0,20 V Strøm når lav 0-1 A Strøm gennem GND A Omstillingstid us Kapacitiv belastning - - TBD uf Induktiv belastning - - TBD uh De digitale udgange er implementeret, så de kun kan trække ned til GND (0 V) og ikke levere strøm. Når en digital udgang er aktiveret, så trækkes den korresponderende forbindelse lav, og når den er deaktiveret, så er den korresponderende forbindelse åben (open-collector/open-drain). Den primære forskel mellem digitale udgange i kontrollerskabet og i værktøjet er reduceret strøm p.g.a. den lille værktøjskonnektor. 27 UR5
28 2.5. Værktøj I/O Bemærk, at de digitale udgange ikke er strømbegrænsede, og at tilsidesættelse af de specificerede data kan forårsage permanent skade. For tydeligt at illustrere hvordan de digitale udgangsporte skal anvendes, vises her nogle enkle eksempler. Anvendelse af digitale udgange Dette eksempel viser, hvordan man aktiverer en belastning ved hjælp af intern 12 V eller 24 V strømforsyning. Husk, at man skal definere outputspænding på I/O-fanebladet. Husk på, at der er spænding mellem POWER-forsyningen og skjoldet/jorden, selv når belastningen er slukket Digitale inputs Parameter Min. Type Maks. Enhed Indgangsspænding -0,5-26 V Logisk lav spænding - - 2,0 V Logisk høj spænding 5,5 - - V Indgangsmodstand - 47 k - Ω De digitale inputs er implementeret med svage pull-down-modstande. Det betyder, at en flydende indgang altid vil udvise lavt. De digitale indgange på værktøjet er implementeret på samme måde som digitale indgange i kontrollerskabet. Anvendelse af digitale indgange Eksemplet ovenfor viser, hvordan en simpel knap eller kontakt forbindes Analoge inputs De analoge indgange i værktøjet er meget forskellige fra dem i kontrollerskabet. For det første er de ikke-differentielle, hvilket er en ulempe i forhold til de analoge indgange på kontrollerens I/O. For det andet har værktøjets analoge indgange strømtilstandsfunktionalitet, hvilket er en fordel sammenlignet med kontrollerens I/O. De analoge indgange kan indstilles til forskellige input-intervaller, som er implementeret på forskellige måder og derfor kan have forskellige offset og generere fejl. 28 UR5
29 2.5. Værktøj I/O Parameter Min. Type Maks. Enhed Indgangsspænding i spændingstilstand -0,5-26 V Indgangsspænding i strømtilstand -0,5-5,0 V Indgangsstrøm i strømtilstand -2,5-25 ma rækkevidde 0V til 5V kω rækkevidde 0V til 10V kω rækkevidde 4 ma til 20 ma Ω Det er vigtigt at bemærke, at alle strømændringer i den fælles GND-forbindelse kan medføre et forstyrrende signal i de analoge indgange, fordi der vil være et spændingsfald langs GND-ledninger og i stik. Bemærk, at en forbindelse mellem værktøjets strømforsyning og de analoge inputs permanent vil skade I/O-funktionaliteten, hvis de analoge indgange er fastsat til strømtilstand. For at vise hvor let det er at bruge digitale indgange, vises her nogle simple eksempler. Anvendelse af analoge indgange, ikke-differentielle Den enkleste måde at anvende analoge indgange på. Outputtet på sensoren kan være enten strøm eller spænding, så længe indgangstilstanden for den analoge indgang er sat til det samme på I/O-fanebladet. Husk at tjekke, at en sensor med spændingsudgang kan køre den interne modstand på værktøjet, ellers kan målingen være ugyldig. Anvendelse af analoge indgange, differentielle Anvendelse af sensorer med forskellige udgange er også ligetil. Man skal blot forbinde den negative udgangsdel til GND (0 V) med en terminalstrip, så vil den fungere på samme måde som en ikke-differentiel sensor. 29 UR5
30 2.5. Værktøj I/O 30 UR5
31 Kapitel 3 Sikkerhed 3.1 Introduktion Dette kapitel giver en introduktion til den lovpligtige dokumentation og vigtig information om risikovurderingen, efterfulgt af et afsnit om nødsituationer. Mht. sikkerhed i generel forstand skal monteringsvejledning fra 1.4 og 2.1 følges. Tekniske specifikationer for det elektriske interface, herunder præstationsniveau og sikkerhedskategorier, findes i afsnit Lovpligtig dokumentation En robotinstallation i EU skal overholde maskindirektivet for at garantere dens sikkerhed. Dette inkluderer følgende punkter. 1. Tjek at produktet overholder alle essentielle krav. 2. Lav en risikovurdering. 3. Lav udtrykkelige instruktioner til operatøren. 4. Lav en overensstemmelseserklæring. 5. Saml al dokumentation til et teknisk dossier. 6. Sæt et CE-mærke på robotinstallationen. Ved en given robotinstallation er det integratoren, der er ansvarlig for at den er i overensstemmelse med relevante direktiver. Universal Robots er ansvarlig for, at selve robotten er i overensstemmelse med relevante EU-direktiver (se afsnit 5.1). Universal Robots har lavet en sikkerhedsguide, som kan hentes på og som er tiltænkt integratorer, som har lidt eller slet ingen erfaring med at lave den nødvendige dokumentation. Hvis robotten er installeret uden for EU, skal robottens integration overholde de lokale regler og love for det specifikke land. Integratoren er ansvarlig for, at disse overholdes. Det er altid nødvendigt at foretage en risikovurdering for at sikre, at hele robotinstallationen er tilstrækkelig sikker. 31
32 3.3. Risikovurdering 3.3 Risikovurdering En af de vigtigste opgaver for en integrator er risikovurderingen. Universal Robots har identificeret nogle potentielt betydelige farer, som en integrator skal tage stilling til, se nedenfor. Bemærk, at andre betydelige farer kan være tilstede i en konkret robotinstallation. 1. Fastklemning af fingre mellem robottens fod og base (led 0). 2. Fastklemning af fingre mellem arm og håndled (led 4). 3. Penetrering af hud mellem skarpe kanter og spidse punkter på værktøj og værktøjsstik. 4. Penetrering af hud fra skarpe kanter og spidse punkter nær robottens bane. 5. Blå mærker på grund af slag fra robotten. 6. Forstuvning eller knoglebrud på grund af slag mellem en tung nyttelast og en hård overflade. 7. Konsekvenser som følge af løse bolte, der holder robotarm eller værktøj. 8. Emner falder ud af værktøjet. F.eks. grundet dårligt greb eller strømafbrydelse. 9. Elektrisk stød eller brand på grund af strømforsyningsfejl, hvis lysnettilslutningen ikke er beskyttet af en hovedsikring, en fejlstrømafbryder og en korrekt jordforbindelse. Se afsnit Fejltagelser på grund af forskellige nødstopknapper til forskellige maskiner. Brug fælles nødstopfunktion som beskrevet i afsnit UR5 er imidlertid en meget sikker robot af følgende grunde: 1. Kontrolsystemet overholder præstationsniveau ISO d. 2. Robottens kontrolsystem er redundant, således at alle farlige fejl tvinger robotten til at gå i en sikker tilstand. 3. Høj-niveau software genererer et beskyttelsesstop, hvis robotten rammer noget. Kraftgrænsen er lavere end 150 N. 4. Endvidere begrænser lavniveau-software det moment, som leddene genererer, hvilket kun tillader en lille afvigelse fra det forventede moment. 5. Softwaren forhindrer udførelse af programmer, hvis robotten er monteret i vinkler, som er betydeligt anderledes end specificeret. 6. Robottens vægt er under 18kg. 7. Robottens udformning er blød, således at tryk (N/m 2 ) per kraft (N) er reduceret. 8. Det er muligt at dreje leddene i en slukket robot. Se afsnit UR5
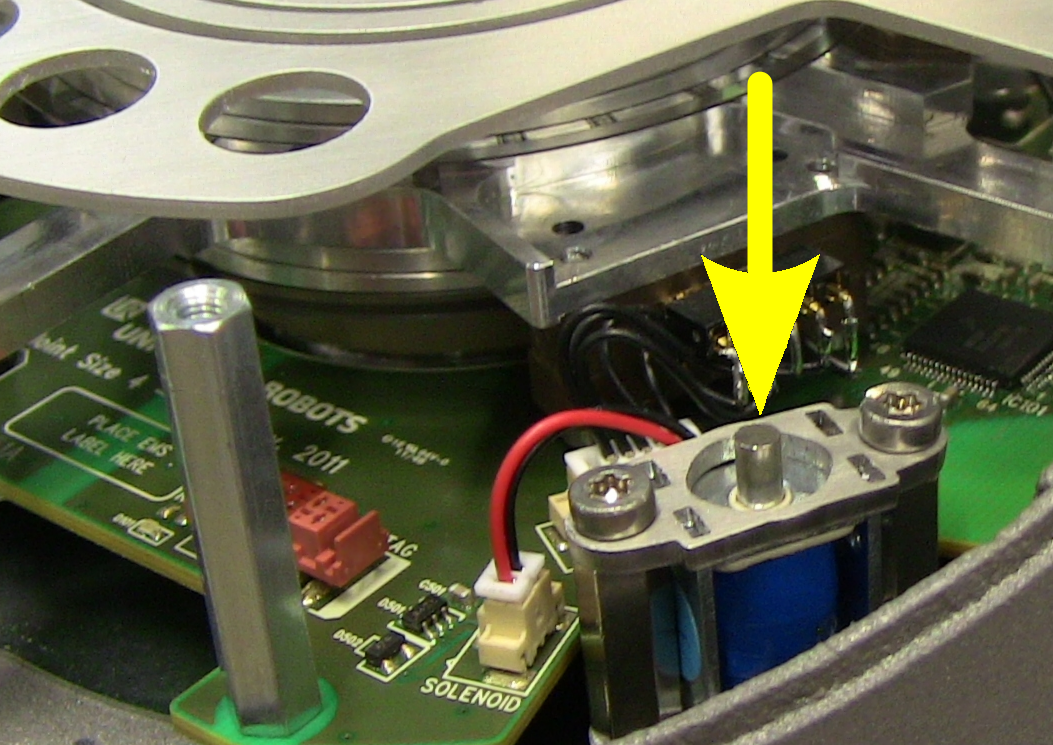
33 3.4. Nødsituationer Det faktum, at robotten er meget sikker, åbner muligheden for enten at spare sikkerhedsgitre væk eller bruge billige sikkerhedsgitre med lavt præstationsniveau. Som hjælp til at overbevise kunder og arbejdstilsyn er robotten UR5 blevet testet af Teknologisk Institut, som er bemyndiget organ for maskindirektivet i Danmark. Denne test konkluderer, at robotten overholder artikel i ENISO :2006. Denne standard er harmoniseret under maskindirektivet og fastslår, at en robot kan fungere sammen med mennesker (altså uden sikkerhedsgitter mellem robot og operatør), hvis den er i overensstemmelse med artikel Risikovurderingen skal selvfølgelig stadig konkludere, at den overordnede robotinstallation er sikker nok. En kopi af denne certificeringsrapport kan rekvireres fra Universal Robots. Standarden EN ISO :2006 er gyldig indtil 1. januar I mellemtiden er den nyere version EN ISO :2011 og den tilsvarende EN ISO :2011, der henvender sig til integratorer, også gyldige. Hvor EN ISO :2006 specifikt angiver, at en maksimal kraft på 150 N kombineret med en risikovurdering til understøttelse er påkrævet for funktion med mennesker, specificerer de nyere standarder ikke en maksimal kraft, men overlader dette til den specifikke risikovurdering. Generelt betyder dette, at uanset den benyttede standard skal en risikovurdering bekræfte, at installationen til en robot, der kan fungere sammen med mennesker, er tilstrækkeligt sikker, og i de fleste tilfælde er kombinationen af en velkonstrueret robotinstallation og maksimal kraft på 150 N tilstrækkelig. 3.4 Nødsituationer I det usandsynlige tilfælde at et eller flere robotled i en nødsituation skal bevæges og det enten er umuligt eller uønsket at robotten tændes, er der tre forskellige måder at tvinge robotleddene i bevægelse uden at tænde for leddenes motorer: 1. Aktivt tilbageløb: Hvis det er muligt, skal robotten tændes ved at trykke på initialiseringsskærmens ON-knap. I stedet for at trykke på knappen bremseudløsning for at tænde for ledmotorerne skal der trykkes på indlæringsknappen på bagsiden af programmeringskonsollen. En speciel tilbageløbstilstand aktiveres, og robotten vil løsne sine bremser automatisk, mens robotten ledes med håndkraft. Udløsning af indlæringsknappen låser bremserne igen. 2. Manuel bremseudløsning: Fjern ledafdækningen ved at fjerne de få M3- skruer, der fastholder den. Udløs bremsen ved at trykke på stemplet på den lille elektromagnet som vist i billedet nedenfor. 3. Tvunget tilbageløb: Tving et led til at bevæge sig ved at trække kraftigt i robotarmen. Hver ledbremse har en friktionskobling, som muliggør bevægelse under højt tvunget moment. Tvunget tilbageløb er kun tiltænkt ved uopsættelige nødstilfælde og kan beskadige ledgearene og andre dele. Drej ikke led mere end nødvendigt, og vær opmærksom på tyngdekraft og tunge nyttelaster. 33 UR5
34 3.4. Nødsituationer 34 UR5
35 Kapitel 4 Garantier 4.1 Produktgaranti Uden skade for noget krav brugeren (kunden) måtte have i relation til forhandleren, skal kunden have garanti fra producenten i henhold til nedenstående betingelser: I tilfælde af at nye enheder og deres komponenter udviser defekter som følge af fremstilling og/eller materialefejl inden 12 måneder efter ibrugtagning (højst 15 måneder fra forsendelse), skal Universal Robots levere de nødvendige reservedele, mens brugeren (kunden) giver arbejdstid for at udskifte reservedelene, enten erstatte delen med en anden tilsvarende del, eller reparere den nævnte del. Denne garanti er ugyldig, hvis defekten i enheden skyldes forkert behandling og/eller manglende overholdelse af oplysningerne i brugervejledningerne. Denne garanti gælder ikke for og kan ikke udvides til ydelser udført af den autoriserede forhandler eller kunden selv (f.eks installation, konfiguration, software-indlæsninger). Kvitteringen sammen med datoen for købet skal kræves som bevis for at påberåbe sig garantien. Krav i henhold til garantien skal indgives inden for to måneder, efter at de bliver kendt. Ejerskab af udstyr eller komponenter erstattet af og returneret til Universal Robots skal optjenes i Universal Robots. Alle andre fordringer som følge af eller i forbindelse med enheden skal være undtaget fra denne garanti. Intet i denne garanti skal forsøge at begrænse eller udelukke kundens lovmæssige rettigheder, eller producentens ansvar for død eller personskade som følge af forsømmelighed. Varigheden af denne garanti kan ikke forlænges af ydelser i henhold til garantien. For så vidt ingen garantiforsømmelse findes, forbeholder Universal Robots sig ret til at opkræve kunden for udskiftning eller reparation. Ovennævnte bestemmelser indebærer ikke en ændring af bevisbyrden til skade for kunden. I tilfælde af at en enhed udviser fejl, dækker Universal Robots ikke eventuelle følgeskader eller tab, såsom tab af produktion eller skader på andet produktionsudstyr. 4.2 Ansvarsfraskrivelse Universal Robots fortsætter med at forbedre stabiliteten og ydeevnen af sine produkter og forbeholder sig derfor ret til at opgradere produktet uden forudgående varsel. Universal Robots forventer at indholdet af denne manual er præcist og korrekt, men tager forbehold for eventuelle fejl eller manglende oplysninger. 35
36 4.2. Ansvarsfraskrivelse 36 UR5
37 Kapitel 5 Inkorporeringserklæring 5.1 Introduktion Ifølge maskindirektivet 2006/42/EC er robotten en delmaskine. De følgende underafsnit er nummererede i samme rækkefølge som kravene i bilag II i dette direktiv. 5.2 Produktfabrikant Navn Universal Robots A/S Adresse Sivlandvænget Odense S Danmark Telefonnummer adresse sales@universal-robots.com CVR-nummer DK Person bemyndiget til at udarbejde den relevante tekniske dokumentation Navn Lasse Kieffer Adresse Sivlandvænget Odense S Danmark Telefonnummer adresse kieffer@universal-robots.com 5.4 Beskrivelse og identifikation af produktet Robotten er beregnet til simple og ufarlige håndteringsopgaver såsom pickand-place, fødning af maskiner, samleprocesser og palletering. 37
38 5.5. Væsentlige krav Generisk betegnelse Funktion Model Serienummer på robotarm UR5 Generelt anvendelig industrirobot UR5 Serienummer på kontrollerskab Handelsbetegnelse UR5 5.5 Væsentlige krav Individuelle robotinstallationer har forskellige sikkerhedskrav, og det er derfor integratoren, der er ansvarlig for alle risici, der ikke omfatter det generelle robotdesign. Det generelle robotdesign, inklusive interfaces, lever op til alle væsentlige krav, som er listet i bilag I i 2006/42/EF. Den tekniske dokumentation er i overensstemmelse med bilag VII del B i 2006/42/EF. 38 UR5
39 5.5. Væsentlige krav Anvendte direktiver 2006/42/EF Maskindirektivet 2004/108/EF EMC-direktivet 2002/95/EF RoHS-direktivet 2002/96/EF WEEE-direktivet Anvendte harmoniserede standarder ISO :2006 (Under anvendte direktiver) ISO :2003 ISO :2006 (delvist) ISO :2011 (delvist) ISO :2011 (delvist) ISO 13850:2006 ISO 12100:2010 ISO 3745:2003 IEC ED 2.0:2005 IEC AMD1 ED 2.0:2010 IEC ED 3.0:2007 (delvist) EN ISO :2008 EN ISO /AC:2009 EN ISO :2008 EN ISO :2008 (delvist) EN ISO :2011 (delvist) EN ISO :2011 (delvist) EN ISO 13850:2008 EN ISO 12100:2010 EN ISO 3745:2009 EN :2005 EN /A1:2011 EN :2007 (delvist) EN 1037:2010 Anvendte generelle standarder (Ikke alle standarder er opført) ISO :2004 (delvist) ISO 9283:1999 (delvist) ISO 9787:2000 (delvist) ISO 9946:2000 (delvist) ISO 8373:1996 (delvist) ISO/TR :2007 ISO 1101:2004 ISO 286-1:2010 ISO 286-2:2010 IEC ED 2.0:2007 IEC :1997 IEC 60529:1989+A1:1999 IEC Ed 2.0:2001 IEC Ed 5.0:2005 (delvist) EN ISO :2004 (delvist) EN ISO 9283:1999 (delvist) EN ISO 9787:2000 (delvist) EN ISO 9946:2000 (delvist) EN ISO 8373:1996 (delvist) EN ISO/TR :2007 EN ISO 1101:2005 EN ISO 286-1:2010 EN ISO 286-2:2010 EN :2007 EN :1998 EN /A1:2005 EN 50205:2003 EN 60529:1991+A1:2000 EN 60320:2003 EN 60204:2006 (delvist) Bemærk, at lavspændingsdirektivet ikke er nævnt. Maskindirektivet 2006/42/EF 39 UR5
40 5.6. Nationale myndigheders kontaktinformation og lavspændingsdirektivet er primære direktiver. Et produkt kan kun være omfattet af ét primært direktiv, og fordi robottens primære farer skyldes mekanisk bevægelse og ikke elektrisk stød, så er robotten omfattet af maskindirektivet. Robotten lever dog op til alle relevante krav til elektronisk konstruktion beskrevet i lavspændingsdirektivet 2006/95/EF. Bemærk også at WEEE-direktivet 2002/96/EF er nævnt. Det skyldes, at der er et overstreget skraldespandssymbol på robot og kontrollerskab. Universal Robots A/S registrerer alle robotsalg inden for Danmark til DPA-systemet. Alle distributører uden for Danmark, men inden for EU, skal lave deres egen registrering til det WEEE-system, der er i det land, som deres firma er placeret i. 5.6 Nationale myndigheders kontaktinformation Bemyndiget person CTO CEO Lasse Kieffer kieffer@universal-robots.com Esben H. Østergaard esben@universal-robots.com Enrico Krog Iversen eki@universal-robots.com 5.7 Vigtig information Robotten må ikke tages i brug, før den færdige maskine, som den skal inkorporeres i, er blevet erklæret i overensstemmelse med bestemmelserne i maskindirektivet 2006/42/EF samt national lovgivning. 5.8 Sted og dato for erklæring Sted Universal Robots A/S Sivlandvænget Odense S Danmark Dato 1. December Den bemyndigede persons identitet og underskrift Navn Lasse Kieffer Adresse Sivlandvænget Odense S Danmark Telefonnummer adresse kieffer@universal-robots.com Underskrift 40 UR5
41 Bilag A Euromap67-interface A.1 Introduktion Denne manual er beregnet til integrator. Det indeholder vigtige oplysninger om integration, programmering, forståelse og debugging Forkortelser anvendt i denne manual er forklaret nedenfor.. Forkortelse Betydning UR Universal Robots CB Kontrollerskab IMM Sprøjtestøbemaskine MAF Støbeområde frit A, B, C, ZA, ZB og ZC Signaler i euromap67-kablet ADVARSEL: En IMM kan anvende op til 250 V på nogle af dets signaler. Forbind ikke en IMM til euromap67-interfacet hvis det ikke er korrekt installeret i CB; herunder alle obligatoriske jordforbindelser. BEMÆRK: Euromap67 understøttes kun på CB produceret efter medio marts
42 A.2. Robot og IMM-integration A.1.1 Euromap67-standard Euromap67-standarden er gratis og kan downloades fra UR s euromap67-modul opfylder alle krav i denne standard, når det tændes. Når det er slukket, specificerer euromap67 standarden, at alle sikkerhedsrelaterede signaler skal være operative. Dette kan medføre farlige situationer og modsiger sikkerhedsspecifikationerne i ISO og EN ISO Derfor åbner UR euromap67-modulet nødstopsignalerne, MAF-signalerne og alle I/O-signaler, når controllerskabet slukkes. Alle, afhængig af fabrikat, valgbare og reserverede I/O-signaler understøttes. Interface i henhold til euromap67.1 er også muligt. A.1.2 CE UR s euromap67-interface er en del af det interne kredsløb i UR-kontrollerskabet, og det kan kun købes sammen med et UR-kontrollerskab. UR s euromap67- interface hører derfor ind under inkorporeringserklæringen, som findes i denne brugervejledning. Interfacet er konstrueret med de samme komponenter og efter de samme principper og testkrav, som kontrollerskabet. Derfor er der ingen ændringer til inkorporeringserklæringen for robotten. Sikkerhedsfunktionerne er PLd, kategori 3, i overensstemmelse med ISO og EN ISO A.2 Robot og IMM-integration De følgende underafsnit indeholder vigtig information til integrator. A.2.1 Nødstop og sikkerhedsstop Nødstopsignalerne deles af robot og IMM. Dette betyder at et nødstop på robotten også stopper IMM og omvendt. Sikkerhedsstopsignalerne (Sikkerhedsanordninger [ZA3-ZC3][ZA4-ZC4]) sikrer at robotten sikkerhedsstoppes, når en dør på IMM er åben. Bemærk, at det ikke er en del af euromap67-standarden at stoppe IMM, hvis robotten sikkerhedsstoppes. Det betyder, at hvis en operatør går ind i robottens arbejdsradius, så vil han ikke have mulighed for at række ind i IMM uden at foretage sikkerhedsstop. Hvis en sikkerhedsanordning skal sikkerhedsstoppe både robotten og IMM, så forbind den til IMM. BEMÆRK: Det specielle eksterne nødstop-input [EEA-EEB] kan anvendes til at forbinde robotten med en tredje maskine. I det tilfælde vil kun robotten nødstoppe, hvis en nødstopknap aktiveres på den tredje maskine, ikke IMM! BEMÆRK: Kontroller altid funktionaliteten af de sikkerhedsrelaterede funktioner. A.2.2 Tilslutning af et MAF-lysværn MAF-signalet [A3-C3] i euromap67-kablet sikrer støbemaskinens kraftige bevægelser. Pas på, at støbemaskinen ikke kan lukke, når robotten er inde i maskinen. Euromap67-interfacet leveres uden et MAF-lysværn. Det betyder, at en fejl i robot-program vil kunne forårsage at IMM lukker om og knuser robotten. Men det er muligt at tilslutte et lysværn som vist nedenfor for at forhindre disse ulykker. 42 UR5
43 A.2. Robot og IMM-integration Et kategori 1-lysgitter kan købes for et par hundrede euro (f.eks PSEN op 2Hs/1 fra Pilz). Euromap67 GND GND 24V 24V MAF MAF 24V GND A.2.3 Montering af robot og værktøj Før der laves en værktøjs- og monteringsoverflade, skal integratoren overveje, hvordan led 4 (håndled 2) er orienteret under pick and place. Led 1, 2 og 3 har parallelle akser, og hvis led 4 orienterer led 5 med venstre eller højre, så er led 5 parallelt med de andre tre akser, som danner en singularitet. Det er generelt en god idé at placere robotten i en 45 graders vinkel eller at konstruere et værktøj, hvor robottens værktøjsflange peger nedad når den griber efter emner fra støbemaskinens lodrette overflade. A.2.4 Brug af robotten uden IMM For at betjene robotten uden IMM skal man bruge et omføringsstik til at lukke nød- og sikkerhedssignaler. Eneste alternativ er permanent at afinstallere interfacet som beskrevet i afsnit A.4.1. A.2.5 Konvertering af euromap12 til euromap67 Til kommunikation mellem IMM og euromap12-interface skal anvendes en E12 - E67 adapter. Der findes flere mulige adaptere på markedet fra forskellige forhandlere.. Desværre er de fleste adaptere konstrueret til specifikke robotter eller IMM er og forudsætter specifikke designvalg. Det betyder, at nogle adaptere ikke vil forbinde UR-robotten og din IMM korrekt. Det anbefales at læse både euromap12- og euromap67-standarden, når du skal bruge eller konstruere en adapter. En liste med generelle fejl vises nedenfor: 1. Måles der 24 V mellem A9 og C9? IMM skal levere 24 V for at aktivere I/O-signalerne. Hvis robotten og IMM har fælles minus/0 V så kan robottens 24 V anvendes til at forbinde A9 med ZA9 og C9 med ZC9. IMM 24 V findes ofte på euromap12 ben Styrer adapteren begge nødstops-kanaler til robotten og begge sikkerhedskanaler til robotten? Det kan typisk opnås ved 4 relæer. 43 UR5

44 A.3. GUI A.3 GUI Det næste underafsnit beskriver hvordan euromap-interfacet kontrolleres fra GUI en, hvordan signalerne til og fra IMM verificeres, hvor let programmeringen gøres med strukturer, og hvordan mere avancerede ting kan gøres ved at bruge signalerne direkte. Det anbefales at bruge euromap67-programskabelonen fremfor at lave et program fra bunden, se nedenfor. A.3.1 Euromap67-programskabelon Efter installation af euromap67-interfacet, vises en ekstra knap som giver adgang til euromap67-programskabelonen. Ved valg af euromap67-programskabelonen vises den på skærmen. Skabelonstrukturen vil derefter være synlig i venstre side af skærmen. 44 UR5

45 A.3. GUI Euromap67-programskabelonen er forberedt til at udføre simple handlinger med IMM. Ved at angive nogle få viapunkter og et par I/O-handlinger er robotten klar til at håndtere emnerne i IMM. Viapunkterne er: WP home position: Robottens udgangspunkt for proceduren. WP wait for item: Det viapunkt, hvor robotten er placeret, mens den venter på at et emne bliver klar i IMM. WP take item: Det viapunkt, hvor robotten tager emnet (inde) i IMM. WP drop item: Det viapunkt, hvor robotten vil slippe emnet netop hentet fra IMM. De to Handling-knudepunkter er beregnet til styring af et værktøj der kan gribe og holde emnerne fra IMM, og så slippe dem når de er udenfor IMM. Nu gentages processen trin for trin, idet robotten flytter nykonstruerede emner fra IMM. Naturligvis bør Gentag-knuden tilpasses, så robotten kun kan køre denne cyklus, så længe der er emner at tage. Ved endvidere at tilpasse BevægJ-knuden, kan robottens bevægelseshastighed tilpasses IMM cyklustiden og, om nødvendigt, emnernes skrøbelighed. Til sidst er euromap67-strukturen helt tilpasset den specifikke IMM procedure. A.3.2 I/O-overblik og fejlfinding Overblik over Euromap67-I/O kan findes under I/O fanebladet. 45 UR5

46 A.3. GUI Der er fire rammer på denne skærm, som beskrives separat nedenfor. Fælles for alle er de to kolonner Robot og Maskine, som viser henholdsvis knapper til styring af outputsignaler, og indikatorer til vise inputsignalernes tilstand. Den (normale) tilstand for signalerne ved start er, at de alle er lave, undtaget 24 V signalerne, og robot-outputtet Automatisk tilstand der er aktiv-lavt og derfor sat højt som standard. Hvis et signal ikke er en del af programstrukturen, og det er beregnet til brug i et robot-program, kan det opnås ved brug af f.eks. Handling- og Vent-knuder. BEMÆRK: Automatisk tilstand fra robotten til IMM er aktivt-lav. Knappen afspejler det fysiske plan, og derfor er Automatisk tilstand aktiveret, når knappen ikke er aktiveret. BEMÆRK: Knapperne til styring af outputsignalerne findes som standard kun i robotprogrammeringstilstand. De kan dog sættes som ønsket på fanebladet I/O-opsætning på Installation-skærmen. Styring Signalerne relateret til styring af bevægelserne mellem robot og IMM vises her. Disse signaler anvendes alle i programstrukturen, hvor de er samlet på passende og sikre måder. Afhængig af producent Disse er signaler, der kan have specifikke formål ifølge IMM-producenten. Robotten er ikke afhængig af detaljerne i disse signaler, og de kan anvendes efter behov. Sikkerhed I robotkolonnen kan indikatorerne Nødstop og Støbeområde frit (elektrisk) ikke styres fra denne skærm. De indikerer simpelthen, om robotten er nødstoppet, og om MAF-outputtet er sat højt. MAF-outputtet er sat højt på den betingelse, at det elektriske overvågningssignal i støbeområdet (muligt med lysværn, som 46 UR5

47 A.3. GUI forklaret ovenfor), og MAF-signalet fra softwaren begge er høje. MAF-signalet fra softwaren kan styres med den respektive knap. Nødstopsignalet fra maskinen indikerer, om IMM er nødstoppet. Værn åbent-inputtet viser status på signaler for Sikkerhedsanordningerne, specificeret i euromap67-standarden. Status Betjeningsmodus for robotten og IMM kan styres/ses (disse signaler anvendes også i programstrukturen). Felterne, der viser spænding og strømforbrug, repræsenterer værdien, der leveres til IMM og sandsynligvis et lysværn ved euromap67 modulet. A.3.3 Funktionalitet i programstrukturen Der er syv programstrukturer, der kan vælges på fanebladet Struktur på programskærmen. Disse strukturer vil være til rådighed, når eurompa67-interfacet er installeret korrekt (som forklaret i afsnit A.4). Et eksempel på deres anvendelse kan ses i euromap67-programskabelonen. Strukturerne er alle lavet for at opnå ordentligt og sikkert samspil med IMM, og derfor indeholder de alle tests, der sikrer at signalerne er sat korrekt. Desuden kan de indstille mere end et output for at aktivere en handling. Når en programstruktur sættes ind i et robotprogram, kan det tilpasses ved at vælge strukturen i programmet og derefter klikke på fanebladet Kommando. Alle programstrukturer består af et antal trin. De fleste trin er aktiveret som standard, og nogle kan ikke inaktiveres, fordi de er essentielle for selve strukturen. Test-trinene får programmet til at stoppe, hvis testbetingelsen ikke opfyldes. Både status for inputs og outputs kan testes. Sæt output-trinene indstiller et specifikt output til enten høj eller lav. Vent til-trinene bruges typisk til at vente, til en bevægelse er færdig, før der fortsættes med yderligere trin og følgende programknuder. 47 UR5

48 A.3. GUI Opstartstjek Beregnet til anvendelse én gang i starten af et robotprogram for at sikre, at robot og maskine er opsat korrekt, før støbningen startes. Brug afkrydsningsfelterne til at aktivere/inaktivere individuelle trin. Klar til at støbe Signalerer til IMM, at det er OK at starte støbeprocessen. Når dette signal er aktiveret, skal robotten være placeret udenfor IMM. Brug afkrydsningsfelterne til at aktivere/inaktivere individuelle trin. 48 UR5
49 A.3. GUI Vent på emne Beregnet til at få robotten til at vente indtil et emne er klart i IMM. Brug afkrydsningsfelterne til at aktivere/inaktivere individuelle trin. Ejector frem Aktiverer ejectoren, der fjerner et emne fra støbemaskinen. Bør anvendes, når robotten er klar til at tage fat i emnet. Brug afkrydsningsfelterne til at aktivere/inaktivere individuelle trin. Ejector tilbage Aktiverer ejectoren tilbage til udgangspositionen. Brug afkrydsningsfelterne til at aktivere/inaktivere individuelle trin. 49 UR5

50 A.3. GUI Kernetræk ind Muliggør flytning af kernetræk til position 1. De kernetræk der skal anvendes, vælges fra dropdown-menuen. Brug afkrydsningsfelterne til at aktivere/inaktivere individuelle trin. Kernetræk ud Muliggør flytning af kernetræk til position 2. De kernetræk der skal anvendes, vælges fra dropdown-menuen. Brug afkrydsningsfelterne til at aktivere/inaktivere individuelle trin. 50 UR5
UR-6-85-5-A Brugermanual
 UR-6-85-5-A Brugermanual Version 1.3, November 2010 2 UR-6-85-5-A Indhold 1 Kom godt i gang 7 1.1 Introduktion.................................. 7 1.1.1 Robotten................................ 8 1.1.2
UR-6-85-5-A Brugermanual Version 1.3, November 2010 2 UR-6-85-5-A Indhold 1 Kom godt i gang 7 1.1 Introduktion.................................. 7 1.1.1 Robotten................................ 8 1.1.2
Geemarc BRUGERVEJLEDNING. Loop Hear LH600
 Geemarc DK BRUGERVEJLEDNING Loop Hear LH600 Introduktion Tillykke med din Geemarc LH600 teleslynge. Dette er en kvalitetsteleslynge designet til brug i dit hjem. Den er let at installere og passer ind
Geemarc DK BRUGERVEJLEDNING Loop Hear LH600 Introduktion Tillykke med din Geemarc LH600 teleslynge. Dette er en kvalitetsteleslynge designet til brug i dit hjem. Den er let at installere og passer ind
MANUAL FANTRONIC 20AMP. TRIAC SLAVEENHED FOR VENTILATION VER:FAN 1.1 SKIOLD GØR EN FORSKEL!
 MANUAL SKIOLD GØR EN FORSKEL! FANTRONIC 20AMP. TRIAC SLAVEENHED FOR VENTILATION VER:FAN 1.1 981 002 317 Ver. 01 11-03-2013 Indhold 1. INTRODUKTION... 4 2. BESKRIVELSE FANTRONIC... 5 2.1 SÅDAN FUNGERER
MANUAL SKIOLD GØR EN FORSKEL! FANTRONIC 20AMP. TRIAC SLAVEENHED FOR VENTILATION VER:FAN 1.1 981 002 317 Ver. 01 11-03-2013 Indhold 1. INTRODUKTION... 4 2. BESKRIVELSE FANTRONIC... 5 2.1 SÅDAN FUNGERER
UR5 Sikkerhedsguide 1
 UR5 Sikkerhedsguide 1 1 Introduktion Denne guide giver en kort introduktion til direktiver og standarder, efterfulgt af et oversigt over hvordan den nødvendige dokumentation kan laves for en simpel robot
UR5 Sikkerhedsguide 1 1 Introduktion Denne guide giver en kort introduktion til direktiver og standarder, efterfulgt af et oversigt over hvordan den nødvendige dokumentation kan laves for en simpel robot
Brugermanual. 1. august 2013 SN UR10: SN CB2: Robot: UR10
 Brugermanual 1. august 2013 Robot: UR10 SN UR10: SN CB2: 2 UR10 Indhold 1 Kom godt i gang 5 1.1 Introduktion.................................. 5 1.1.1 Robotten................................ 6 1.1.2 Programmer..............................
Brugermanual 1. august 2013 Robot: UR10 SN UR10: SN CB2: 2 UR10 Indhold 1 Kom godt i gang 5 1.1 Introduktion.................................. 5 1.1.1 Robotten................................ 6 1.1.2 Programmer..............................
Brugermanual UR5/CB3. Oversættelse af den originale vejledning (da)
") Brugermanual UR5/CB3 Oversættelse af den originale vejledning (da) Brugermanual UR5/CB3 Version 3.1 (rev. 17782) Oversættelse af den originale vejledning (da) Serienummer UR5: Serienummer CB3: Oplysningerne
Brugermanual UR5/CB3 Oversættelse af den originale vejledning (da) Brugermanual UR5/CB3 Version 3.1 (rev. 17782) Oversættelse af den originale vejledning (da) Serienummer UR5: Serienummer CB3: Oplysningerne
INSTALLATIONSGUIDE KOM GODT IGANG
 INSTALLATIONSGUIDE KOM GODT IGANG TV Formålet med denne guide Læs dette først Inden du kan anvende dine høreapparater sammen med Connectline Tv-adapter, skal adapteren først tilsluttes fjernsynet og en
INSTALLATIONSGUIDE KOM GODT IGANG TV Formålet med denne guide Læs dette først Inden du kan anvende dine høreapparater sammen med Connectline Tv-adapter, skal adapteren først tilsluttes fjernsynet og en
Intelligent Solar Charge Controller Solar30 User s Manual
 OM Solceller Intelligent Solar Charge Controller Solar30 User s Manual Læs venligst denne instruktion grundigt igennem, før du bruger den. 1 Produkt introduktion: Denne controller er en slags intelligent
OM Solceller Intelligent Solar Charge Controller Solar30 User s Manual Læs venligst denne instruktion grundigt igennem, før du bruger den. 1 Produkt introduktion: Denne controller er en slags intelligent
MP3 player med DMX interface.
 Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK MP3 player med DMX interface. Funktion: En avanceret Mp3spiller med forskellige styringsmuligheder, velegnet til brug i museer, teatre, udstillinger
Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK MP3 player med DMX interface. Funktion: En avanceret Mp3spiller med forskellige styringsmuligheder, velegnet til brug i museer, teatre, udstillinger
MEN-001-B GARAGEPORTÅBNER MONTERINGSVEJLEDNING
 MEN-001-B GARAGEPORTÅBNER MONTERINGSVEJLEDNING INDHOLDSFORTEGNELSE Sikkerhedsforanstaltninger.....1 Nødvendigt værktøj...1 Montering af garageportåbneren...2-6 Montering af skinnerne..7-8 Stramning af
MEN-001-B GARAGEPORTÅBNER MONTERINGSVEJLEDNING INDHOLDSFORTEGNELSE Sikkerhedsforanstaltninger.....1 Nødvendigt værktøj...1 Montering af garageportåbneren...2-6 Montering af skinnerne..7-8 Stramning af
MVT380 Vejledning. Forord. Website: www.smartgps.dk Kontakt: salg@smartgps.dk. Tillykke med din nye GPS tracker MVT380.
 MVT380 Vejledning Forord Tillykke med din nye GPS tracker MVT380. Denne manual viser hvordan du installerer enheden korrekt. Sørg for at læse denne manual grundigt, før du bruger dette produkt. Brugermanualen
MVT380 Vejledning Forord Tillykke med din nye GPS tracker MVT380. Denne manual viser hvordan du installerer enheden korrekt. Sørg for at læse denne manual grundigt, før du bruger dette produkt. Brugermanualen
BRUGER MANUAL. * Brugervejledning * Generelle Specifikationer * Installation og vedligeholdelse
 BRUGER MANUAL * Brugervejledning * Generelle Specifikationer * Installation og vedligeholdelse 1 Tak fordi du har valgt vores automatiske pumpestation. Læs venligst denne bruger manual grundigt, inden
BRUGER MANUAL * Brugervejledning * Generelle Specifikationer * Installation og vedligeholdelse 1 Tak fordi du har valgt vores automatiske pumpestation. Læs venligst denne bruger manual grundigt, inden
Brugermanual AC/DC 2 AC/DC 4 AC/DC 6 AC/DC 9 DC IP68 AC IP65
 Brugermanual AC/DC 2 AC/DC 4 AC/DC 6 AC/DC 9 DC IP68 AC IP65 2 Hvad indeholder denne pakke? 1 1 2 2 3 Hvad har jeg ellers brug for? 9V 1-9 Fugtsensor (valgfri) DC IP68 AC IP65 Brugermanual M i r a c l
Brugermanual AC/DC 2 AC/DC 4 AC/DC 6 AC/DC 9 DC IP68 AC IP65 2 Hvad indeholder denne pakke? 1 1 2 2 3 Hvad har jeg ellers brug for? 9V 1-9 Fugtsensor (valgfri) DC IP68 AC IP65 Brugermanual M i r a c l
Robot nr: Har deltaget: Oplysning om robotcellen: produktion og virkemåde; kort forklaring eller henvisning.
 Robot nr: Kontrol af robotceller Nye / ændringer Dato for gennemgang. Accept af ibrugtagning Initialer Underskrift Ja Nej Projektleder (ansvarlig indkøber) Robotintegrator Modtager (ansvarlig drift) Kompetent
Robot nr: Kontrol af robotceller Nye / ændringer Dato for gennemgang. Accept af ibrugtagning Initialer Underskrift Ja Nej Projektleder (ansvarlig indkøber) Robotintegrator Modtager (ansvarlig drift) Kompetent
ODSIF BRUGSANVISNING TIL MOTORISERET RULLEGARDIN MED FJERNBETJENING. Model: CL-338H
 ODSIF BRUGSANVISNING TIL MOTORISERET RULLEGARDIN MED FJERNBETJENING Model: CL-338H 1 INDHOLDSFORTEGNELSE 1. Beskrivelse af det motoriserede rullegardin med fjernbetjening... 3 1.1 Generelle egenskaber...
ODSIF BRUGSANVISNING TIL MOTORISERET RULLEGARDIN MED FJERNBETJENING Model: CL-338H 1 INDHOLDSFORTEGNELSE 1. Beskrivelse af det motoriserede rullegardin med fjernbetjening... 3 1.1 Generelle egenskaber...
ELEKTRISK TERRASSEVARMER
 ELEKTRISK TERRASSEVARMER HN 12362 Brugervejledning Læs brugervejledningen omhyggeligt, før terrassevarmeren tages i brug, og gem den til senere brug. Pak terrassevarmeren ud og kontroller, at alle dele
ELEKTRISK TERRASSEVARMER HN 12362 Brugervejledning Læs brugervejledningen omhyggeligt, før terrassevarmeren tages i brug, og gem den til senere brug. Pak terrassevarmeren ud og kontroller, at alle dele
SSIHuset Svane Electronic Arildsvej 27, Gråmose, DK-7442 Engesvang. Tastatur med proximity standard læser Model 12 og 20
 1 21.11.2010 Tastatur med proximity standard læser Model 12 og 20 Ny version December 2010 Med variabel kode længde SSIHuset Svane Electronic Arildsvej 27, Gråmose, DK-7442 Engesvang ssi@svane-el.dk www.svane-el.dk
1 21.11.2010 Tastatur med proximity standard læser Model 12 og 20 Ny version December 2010 Med variabel kode længde SSIHuset Svane Electronic Arildsvej 27, Gråmose, DK-7442 Engesvang ssi@svane-el.dk www.svane-el.dk
STEVISON BLUETOOTH USB MICRO SD DAB+ FM DIGITAL RADIO
 STEVISON BLUETOOTH USB MICRO SD DAB+ FM DIGITAL RADIO Model: HN13549 Vejledning Funktioner 1. INFO/MENU 2. ALARM 3. NULSTIL 4. VÆLG 5. MODE 6. SCAN 7. VENSTRE ( ) 8. HØJRE ( ) 9. BÆREGREB 10. DOT-MATRIX
STEVISON BLUETOOTH USB MICRO SD DAB+ FM DIGITAL RADIO Model: HN13549 Vejledning Funktioner 1. INFO/MENU 2. ALARM 3. NULSTIL 4. VÆLG 5. MODE 6. SCAN 7. VENSTRE ( ) 8. HØJRE ( ) 9. BÆREGREB 10. DOT-MATRIX
DiSEqC-Positioner. Best. nr. HN4892 (Brugsanvisnings nr. 361)
") DiSEqC-Positioner Best. nr. HN4892 (Brugsanvisnings nr. 361) DiSEqC 1.0/1.2 Positioner DiSEqC-omformer, som gør at man kan styre en parabolmotor 36-Volts type med alle digital modtagere som har standard
DiSEqC-Positioner Best. nr. HN4892 (Brugsanvisnings nr. 361) DiSEqC 1.0/1.2 Positioner DiSEqC-omformer, som gør at man kan styre en parabolmotor 36-Volts type med alle digital modtagere som har standard
ELCANIC A/S. ENERGY METER Type ENG110. Version 3.00. Inkl. PC program: ENG110. Version 3.00. Betjeningsvejledning
 ELCANIC A/S ENERGY METER Type ENG110 Version 3.00 Inkl. PC program: ENG110 Version 3.00 Betjeningsvejledning 1/11 Generelt: ELCANIC A/S ENERGY METER Type ENG110 er et microprocessor styret instrument til
ELCANIC A/S ENERGY METER Type ENG110 Version 3.00 Inkl. PC program: ENG110 Version 3.00 Betjeningsvejledning 1/11 Generelt: ELCANIC A/S ENERGY METER Type ENG110 er et microprocessor styret instrument til
Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless
 Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless Side 1 af 8 Indholdsfortegnelse 1 PAKKENS INDHOLD... 3 2 INSTALLATION... 4 2.1 PLACERING... 4 2.2 FORBRUG... 4 2.3 12V TILSLUTNING... 4
Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless Side 1 af 8 Indholdsfortegnelse 1 PAKKENS INDHOLD... 3 2 INSTALLATION... 4 2.1 PLACERING... 4 2.2 FORBRUG... 4 2.3 12V TILSLUTNING... 4
SPIDER Quick guide. DATO: August 2017 FORHANDLER: WASYS A/S. Langebjergvænget Roskilde
 SPIDER Quick guide DATO: August 2017 FORHANDLER: WASYS A/S Langebjergvænget 18 4000 Roskilde +45 7221 7979 Indhold Om SPIDER... 3 Funktioner ved SPIDER... 3 Spændingsforsyning... 3 Installation og fysiske
SPIDER Quick guide DATO: August 2017 FORHANDLER: WASYS A/S Langebjergvænget 18 4000 Roskilde +45 7221 7979 Indhold Om SPIDER... 3 Funktioner ved SPIDER... 3 Spændingsforsyning... 3 Installation og fysiske
BRUGERVEJLEDNING SIGNALFORSTÆRKER
 BRUGERVEJLEDNING SIGNALFORSTÆRKER Side 1 til signalforstærker Introduktion Signalforstærkeren fra LOCKON bruges til at forlænge og forstærke det trådløse signal fra centralenheden ud til de forskellige
BRUGERVEJLEDNING SIGNALFORSTÆRKER Side 1 til signalforstærker Introduktion Signalforstærkeren fra LOCKON bruges til at forlænge og forstærke det trådløse signal fra centralenheden ud til de forskellige
EC Vent Installationsvejledning
 -DK 15-03-2011V.A-002 Indhold 1 Overensstemmelseserklæring... 1 2 Advarsler... 2 3 Introduktion til produktet... 3 3.1 Generelt... 3 3.1.1 Beskrivelse af rumenheden... 3 3.1.2 Beskrivelse af styretavlen...
-DK 15-03-2011V.A-002 Indhold 1 Overensstemmelseserklæring... 1 2 Advarsler... 2 3 Introduktion til produktet... 3 3.1 Generelt... 3 3.1.1 Beskrivelse af rumenheden... 3 3.1.2 Beskrivelse af styretavlen...
Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless
 Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless Side 1 af 8 Indholdsfortegnelse 1 PAKKENS INDHOLD... 3 2 INSTALLATION... 4 2.1 PLACERING... 4 2.2 FORBRUG... 4 2.3 12V TILSLUTNING... 4
Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless Side 1 af 8 Indholdsfortegnelse 1 PAKKENS INDHOLD... 3 2 INSTALLATION... 4 2.1 PLACERING... 4 2.2 FORBRUG... 4 2.3 12V TILSLUTNING... 4
STEVISON BLUETOOTH USB MICRO SD DAB+ FM DIGITAL RADIO
 STEVISON BLUETOOTH USB MICRO SD DAB+ FM DIGITAL RADIO Model: HN13549 Vejledning Funktioner 1. INFO/MENU 2. ALARM 3. NULSTIL 4. VÆLG 5. MODE 6. SCAN 7. VENSTRE ( ) 8. HØJRE ( ) 9. BÆREGREB 10. DOT-MATRIX
STEVISON BLUETOOTH USB MICRO SD DAB+ FM DIGITAL RADIO Model: HN13549 Vejledning Funktioner 1. INFO/MENU 2. ALARM 3. NULSTIL 4. VÆLG 5. MODE 6. SCAN 7. VENSTRE ( ) 8. HØJRE ( ) 9. BÆREGREB 10. DOT-MATRIX
BRUGERVEJLEDNING SIGNALFORSTÆRKER
 BRUGERVEJLEDNING SIGNALFORSTÆRKER Side 1 til signalforstærker Introduktion en fra LOCKON bruges til at forlænge og forstærke det trådløse signal fra centralenheden ud til de forskellige enheder som rumsensorer,
BRUGERVEJLEDNING SIGNALFORSTÆRKER Side 1 til signalforstærker Introduktion en fra LOCKON bruges til at forlænge og forstærke det trådløse signal fra centralenheden ud til de forskellige enheder som rumsensorer,
Olieradiator Model Nr.: 1487 230V~50Hz, 2000W
 Olieradiator Model Nr.: 1487 230V~50Hz, 2000W - 1 - ADVARSEL: LÆS DENNE BRUGSVEJLEDNING GRUNDIGT FØR BRUG Ved brug af elektriske apparater er det vigtigt at overholde de grundlæggende sikkerhedsforanstaltninger.
Olieradiator Model Nr.: 1487 230V~50Hz, 2000W - 1 - ADVARSEL: LÆS DENNE BRUGSVEJLEDNING GRUNDIGT FØR BRUG Ved brug af elektriske apparater er det vigtigt at overholde de grundlæggende sikkerhedsforanstaltninger.
Mean Well, LCM-serie installations vejledning.
 Egenskaber: 180 -> 295 VAC (LCM-25: 180 277 VAC) Indbygget aktivt power factor funktion Udgangsstrøm indstilles med DIP kontakter Indbygget DALI interface og simpel kontakt dæmpning (DA version) Indbygget
Egenskaber: 180 -> 295 VAC (LCM-25: 180 277 VAC) Indbygget aktivt power factor funktion Udgangsstrøm indstilles med DIP kontakter Indbygget DALI interface og simpel kontakt dæmpning (DA version) Indbygget
OVERVÅGNINGSSYSTEM FICO-64» MONTAGEANVISNING
 FIRE SAFETY AIR MANAGEMENT OVERVÅGNINGSSYSTEM» MONTAGEANVISNING 2 1 TILSLUTNING 1.5 RØGDETEKTOR 1 eller 2 røgdetektorer (se DIP indstillinger) kan vælges. 1.1 GENERELT Styreenheden SOC8-S2 indeholder elektroniske
FIRE SAFETY AIR MANAGEMENT OVERVÅGNINGSSYSTEM» MONTAGEANVISNING 2 1 TILSLUTNING 1.5 RØGDETEKTOR 1 eller 2 røgdetektorer (se DIP indstillinger) kan vælges. 1.1 GENERELT Styreenheden SOC8-S2 indeholder elektroniske
Mean Well, LCM-serie installations vejledning.
 Egenskaber: 180 -> 295 VAC (LCM-25: 180 277 VAC) Indbygget aktivt power factor funktion Udgangsstrøm indstilles med DIP kontakter Indbygget DALI interface og simpel kontakt dæmpning (DA version) Indbygget
Egenskaber: 180 -> 295 VAC (LCM-25: 180 277 VAC) Indbygget aktivt power factor funktion Udgangsstrøm indstilles med DIP kontakter Indbygget DALI interface og simpel kontakt dæmpning (DA version) Indbygget
SSI 6000.0400 GSM Fjernbetjenings system for porte/garage døre
 1 SSI 6000.0400 GSM Fjernbetjenings system for porte/garage døre Vejledning SSIHuset v/svane Electronic ApS Arildsvej 27, Gråmose, DK-7442 Engesvang mail: ssi@svane-el.dk http: svane-el.dk 2 System for
1 SSI 6000.0400 GSM Fjernbetjenings system for porte/garage døre Vejledning SSIHuset v/svane Electronic ApS Arildsvej 27, Gråmose, DK-7442 Engesvang mail: ssi@svane-el.dk http: svane-el.dk 2 System for
INSTALLATIONSGUIDE KOM GODT IGANG
 INSTALLATIONSGUIDE KOM GODT IGANG telefon Formålet med denne guide Læs dette først Inden du kan anvende dine høreapparater sammen med ConnectLine telefon- adapter og en fastnettelefon, skal adapteren først
INSTALLATIONSGUIDE KOM GODT IGANG telefon Formålet med denne guide Læs dette først Inden du kan anvende dine høreapparater sammen med ConnectLine telefon- adapter og en fastnettelefon, skal adapteren først
Brændesav m/hårdmetalklinge
 MODEL: LOG SAW 400 Art.: 75107625 Brændesav m/hårdmetalklinge LÆS VENLIGST DENNE VEJLEDNING OMHYGGELIGT IGENNEM INDEN MASKINEN ANVENDES 1. Indholdsfortegnelse 2. Sikkerhedsinstruktioner...2 3. Saven i
MODEL: LOG SAW 400 Art.: 75107625 Brændesav m/hårdmetalklinge LÆS VENLIGST DENNE VEJLEDNING OMHYGGELIGT IGENNEM INDEN MASKINEN ANVENDES 1. Indholdsfortegnelse 2. Sikkerhedsinstruktioner...2 3. Saven i
Dobbelt sender detektor med 4 kanals frekvenser. 1. Funktioner. 2. Produkt gennemgang
 Dobbelt sender detektor med 4 kanals frekvenser Tak, fordi du har købt denne stråle detektor, læs venligst denne brugsanvisning omhyggeligt før installation. Forsøg aldrig at adskille eller reparere produktet.
Dobbelt sender detektor med 4 kanals frekvenser Tak, fordi du har købt denne stråle detektor, læs venligst denne brugsanvisning omhyggeligt før installation. Forsøg aldrig at adskille eller reparere produktet.
Brugermanual. Manuel d instruction
 Brugermanual Manuel d instruction sonoro audio GmbH Unter Goldschmied 6 50667 Cologne Tyskland info@sonoro-audio.com www.sonoro-audio.com 03/12 Fabrikanten arbejder løbende på den videre udvikling af alle
Brugermanual Manuel d instruction sonoro audio GmbH Unter Goldschmied 6 50667 Cologne Tyskland info@sonoro-audio.com www.sonoro-audio.com 03/12 Fabrikanten arbejder løbende på den videre udvikling af alle
Brugermanual UR5/CB3. Oversættelse af den originale vejledning (da)
") Brugermanual UR5/CB3 Oversættelse af den originale vejledning (da) Brugermanual UR5/CB3 Version 3.2 (rev. 18629) Oversættelse af den originale vejledning (da) Serienummer UR5/CB3: Oplysningerne her er
Brugermanual UR5/CB3 Oversættelse af den originale vejledning (da) Brugermanual UR5/CB3 Version 3.2 (rev. 18629) Oversættelse af den originale vejledning (da) Serienummer UR5/CB3: Oplysningerne her er
Brugervejledning. ComX brugervejledning version 4.1
 Brugervejledning ComX brugervejledning version 4.1 1 INDHOLD PAKKENS INDHOLD Pakkens indhold side 2 Fjernbetjening side 2 Tilslutning af Settop-boksen side 3 Introduktion til Bredbånds-TV side 4 Tilslutning
Brugervejledning ComX brugervejledning version 4.1 1 INDHOLD PAKKENS INDHOLD Pakkens indhold side 2 Fjernbetjening side 2 Tilslutning af Settop-boksen side 3 Introduktion til Bredbånds-TV side 4 Tilslutning
Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless
 Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless ID er for trådløse sensorer: Fjernbetjening: Bevægelsessensor: Vandsensor Landstrømsensor: Dørsensor: Temperatursensor: Side 1 af 8 Indholdsfortegnelse
Installationsmanual SuperSail Marine Alarm Marine Alarm Wireless ID er for trådløse sensorer: Fjernbetjening: Bevægelsessensor: Vandsensor Landstrømsensor: Dørsensor: Temperatursensor: Side 1 af 8 Indholdsfortegnelse
El-forvarmeflade Til aggregater
 INSTRUKTIONSMANUAL El-forvarmeflade Til aggregater Version 1.0 17/06-2014 www.geovent.dk Indhold 1.0 Generelle sikkerhedsforskrifter...2 1.1 Fare...2 1.2 Anvendelsesområde...2 1.3 Beskrivelse...2 1.4 Mærkning...............................
INSTRUKTIONSMANUAL El-forvarmeflade Til aggregater Version 1.0 17/06-2014 www.geovent.dk Indhold 1.0 Generelle sikkerhedsforskrifter...2 1.1 Fare...2 1.2 Anvendelsesområde...2 1.3 Beskrivelse...2 1.4 Mærkning...............................
Vildtkamera DTC-530V.
 Vildtkamera DTC-530V. Indhold fortegnelse......... 1 Kom godt i gang.........2 Information......... 2 Anvendelse......... 3 Fjernbetjening...... 3 Hukommelse kort......... 4 Quick Start...... 4 Isæt batterier.........
Vildtkamera DTC-530V. Indhold fortegnelse......... 1 Kom godt i gang.........2 Information......... 2 Anvendelse......... 3 Fjernbetjening...... 3 Hukommelse kort......... 4 Quick Start...... 4 Isæt batterier.........
Svane Electronic Timer universal med 8 funktioner 1
 Svane Electronic Timer universal med 8 funktioner 1 Digital timer print modul 12V 2000.2231 Multi funktions timer med 8 funktioner, anvendelig i mange installationer, forsyning 12VDC drift. Printet har
Svane Electronic Timer universal med 8 funktioner 1 Digital timer print modul 12V 2000.2231 Multi funktions timer med 8 funktioner, anvendelig i mange installationer, forsyning 12VDC drift. Printet har
TOP ACCESS Automatisk bundstøvsuger BRUGERMANUAL
 TOP ACCESS Automatisk bundstøvsuger BRUGERMANUAL VIGTIGE SIKKERHEDSINSTRUKTIOER LÆS OG FØLG INSTRUKTIONERNE VIGTIGT: Først når bundsugeren er helt under vand tilsluttes en til strømstikket og der tændes
TOP ACCESS Automatisk bundstøvsuger BRUGERMANUAL VIGTIGE SIKKERHEDSINSTRUKTIOER LÆS OG FØLG INSTRUKTIONERNE VIGTIGT: Først når bundsugeren er helt under vand tilsluttes en til strømstikket og der tændes
JK5. Bruger manual Reservedels liste
 JK5 Bruger manual Reservedels liste Gennemlæs og følg nøje alle sikkerheds instruktioner før omsnørings maskinen betjenes. Gem denne instruktions manual på et sikker og nemt tilgængelig sted for fremtidig
JK5 Bruger manual Reservedels liste Gennemlæs og følg nøje alle sikkerheds instruktioner før omsnørings maskinen betjenes. Gem denne instruktions manual på et sikker og nemt tilgængelig sted for fremtidig
Ford Ranger brugervejledning
 Ford Ranger brugervejledning Model Aldersgrænse Bæreevne Ford Ranger 37-96 måneder 30kg Oversigt over dele Del Antal Del Antal Karosseri 1 Kølerhjelm 1 Lys 4 Forhjul 2 Hjulkapsler 4 Baghjul 2 Forrude 1
Ford Ranger brugervejledning Model Aldersgrænse Bæreevne Ford Ranger 37-96 måneder 30kg Oversigt over dele Del Antal Del Antal Karosseri 1 Kølerhjelm 1 Lys 4 Forhjul 2 Hjulkapsler 4 Baghjul 2 Forrude 1
Selektro CCM App. Brugermanual. Selektro CCM App Brugermanual DK. Selektro A/S, Erhvervsvej 29-35, DK-9632 Møldrup. Copyright Selektro A/S 2017
 Selektro CCM App Brugermanual Selektro A/S, Erhvervsvej 29-35, DK-9632 Møldrup Selektro CCM App Brugermanual DK Copyright Selektro A/S 2017 0881-1344006 V01 Indhold 1 Beskrivelse... 1 1.1 Funktion... 2
Selektro CCM App Brugermanual Selektro A/S, Erhvervsvej 29-35, DK-9632 Møldrup Selektro CCM App Brugermanual DK Copyright Selektro A/S 2017 0881-1344006 V01 Indhold 1 Beskrivelse... 1 1.1 Funktion... 2
Trådløs aktuator til radiatorventil Model: TRV10RFM
 Trådløs aktuator til radiatorventil Model: TRV10RFM INSTALLATIONS-/BRUGERMANUAL Indhold i æsken Æskens indhold Anvendte symboler i denne manual: Sikkerhed Vigtig info Indhold: Æskens indhold Introduktion
Trådløs aktuator til radiatorventil Model: TRV10RFM INSTALLATIONS-/BRUGERMANUAL Indhold i æsken Æskens indhold Anvendte symboler i denne manual: Sikkerhed Vigtig info Indhold: Æskens indhold Introduktion
NBE PELVAC MANUAL. Version 3.000001. RTB - Ready To Burn
 DK NBE PELVAC MANUAL Version 3.000001 RTB - Ready To Burn INDHOLD: Kære kunde. Tak fordi du har købt dette NBE-produkt, som er designet og fremstillet efter de højeste standarder i EU. Vi anbefaler, at
DK NBE PELVAC MANUAL Version 3.000001 RTB - Ready To Burn INDHOLD: Kære kunde. Tak fordi du har købt dette NBE-produkt, som er designet og fremstillet efter de højeste standarder i EU. Vi anbefaler, at
SSIHuset Svane Electronic Arildsvej 27, Gråmose, 7442 Engesvang kunde@svane-el.com Tlf.: 70253010 www.svane-el.dk
 29.9.2015 Vejledning for brug og installation GSM dørklokke med mobil samtale SSIHuset Svane Electronic Arildsvej 27, Gråmose, 7442 Engesvang kunde@svane-el.com Tlf.: 70253010 www.svane-el.dk 1 Sikkerheds
29.9.2015 Vejledning for brug og installation GSM dørklokke med mobil samtale SSIHuset Svane Electronic Arildsvej 27, Gråmose, 7442 Engesvang kunde@svane-el.com Tlf.: 70253010 www.svane-el.dk 1 Sikkerheds
Manual for Jasopels Flåtårn 3210-187005. Manual Jasopels Flåtårn
 Manual for Jasopels Flåtårn 3210-187005 Manual Jasopels Flåtårn Tlf. 98420566 Flåtårn Da_Manual 1. Indholdsfortegnelse 1. Indholdsfortegnelse... 2 2. Forord... 3 3. Symbol forklaring... 3 3.1 Symboler
Manual for Jasopels Flåtårn 3210-187005 Manual Jasopels Flåtårn Tlf. 98420566 Flåtårn Da_Manual 1. Indholdsfortegnelse 1. Indholdsfortegnelse... 2 2. Forord... 3 3. Symbol forklaring... 3 3.1 Symboler
Installationsvejledning Danfoss Link Hydronic Controller
 MAKING MODERN LIVING POSSIBLE Installationsvejledning Danfoss Link Hydronic Controller Danfoss heating solutions Indhold. Kvik-guide til installation.................................................. 4.
MAKING MODERN LIVING POSSIBLE Installationsvejledning Danfoss Link Hydronic Controller Danfoss heating solutions Indhold. Kvik-guide til installation.................................................. 4.
Instruktion. MINIGAM+ On/off og analog styring IN217DKA
 Instruktion MINIGAM+ On/off og analog styring IN217DKA 1. Beskrivelse af kort Advarsel! Flere dele på printkortet er forsynet med 115/230VAC. Afbryd altid strømmen før der arbejdes på aktuatoren. 2. For
Instruktion MINIGAM+ On/off og analog styring IN217DKA 1. Beskrivelse af kort Advarsel! Flere dele på printkortet er forsynet med 115/230VAC. Afbryd altid strømmen før der arbejdes på aktuatoren. 2. For
Humantechnik. BRUGERVEJLEDNING Lisa Vækkeur RF Time A-3240
 Humantechnik DK BRUGERVEJLEDNING Lisa Vækkeur RF Time A-3240 Lys/Snooze Alarm on/off Visuel indikation af alarm, der er aktiveret. Højtaler on/off Blinkende lys on/off 12 V strømforsyning Højtaler Knap
Humantechnik DK BRUGERVEJLEDNING Lisa Vækkeur RF Time A-3240 Lys/Snooze Alarm on/off Visuel indikation af alarm, der er aktiveret. Højtaler on/off Blinkende lys on/off 12 V strømforsyning Højtaler Knap
Installering. Powerline 500 Model XAVB5421
 Installering Powerline 500 Model XAVB5421 Pakkens indhold I nogle regioner er en ressource-cd inkluderet sammen med produktet. Bemærk: Adaptere varierer fra region til region. Din adapter kan se anderledes
Installering Powerline 500 Model XAVB5421 Pakkens indhold I nogle regioner er en ressource-cd inkluderet sammen med produktet. Bemærk: Adaptere varierer fra region til region. Din adapter kan se anderledes
INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER GA 1000
 INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER GA 1000 INSTALLATIONS MANUALEN SKAL GENNEMLÆSES OMHYGGELIG FØR IBRUGTAGNING ADVARSEL FOR SIKKER INSTALLATION Inden installation af automatikken skal balance fjederen
INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER GA 1000 INSTALLATIONS MANUALEN SKAL GENNEMLÆSES OMHYGGELIG FØR IBRUGTAGNING ADVARSEL FOR SIKKER INSTALLATION Inden installation af automatikken skal balance fjederen
(2 DØRE, 100 NØGLER)
") BESKRIVELSE Vprox 100 er et avanceret adgangskontrol-system baseret på Videx unikke Coded Key, der giver mere end 4 milliarder kombinationer. Systemet kan kontrollere to uafhængige døre og gemme op til
BESKRIVELSE Vprox 100 er et avanceret adgangskontrol-system baseret på Videx unikke Coded Key, der giver mere end 4 milliarder kombinationer. Systemet kan kontrollere to uafhængige døre og gemme op til
Læs denne manual grundigt igennem før montage og ibrugtagning.
 Tillykke med Deres nye Niveaukontrol. Læs denne manual grundigt igennem før montage og ibrugtagning. Standarder: Denne Niveaukontrol opfylder gældende regler og normer for sikkerhed. Produktet er testet
Tillykke med Deres nye Niveaukontrol. Læs denne manual grundigt igennem før montage og ibrugtagning. Standarder: Denne Niveaukontrol opfylder gældende regler og normer for sikkerhed. Produktet er testet
Brugervejledning. Rørventilator. Artikel: 300115 EAN: 5709133910150
 Brugervejledning Rørventilator Artikel: 300115 EAN: 5709133910150 Læs venligst manualen grundigt igennem inden brug. Må kun installeres af en autoriseret elinstallatør. Sikkerheds instruktioner ADVARSEL
Brugervejledning Rørventilator Artikel: 300115 EAN: 5709133910150 Læs venligst manualen grundigt igennem inden brug. Må kun installeres af en autoriseret elinstallatør. Sikkerheds instruktioner ADVARSEL
INSTALLATIONS VEJLEDNING TV-adapter
 INSTALLATIONS VEJLEDNING TV-adapter 3 Indholdsfortegnelse Læs dette først 4 Oversigt over TV-adapteren 5 Tilslutning til strømkilde 6 Tilslutning til tv 7 Valgfri mellemstik til tv-tilslutning 8 Klargør
INSTALLATIONS VEJLEDNING TV-adapter 3 Indholdsfortegnelse Læs dette først 4 Oversigt over TV-adapteren 5 Tilslutning til strømkilde 6 Tilslutning til tv 7 Valgfri mellemstik til tv-tilslutning 8 Klargør
BRUGSANVISNING MODEL
 BRUGSANVISNING MODEL Tillykke med Deres nye multimeter, før De går igang med at bruge produktet, bedes De læse denne brugsanvisning grundigt. I. ANVENDELSE Dette kategori III multimeter kan anvendes til
BRUGSANVISNING MODEL Tillykke med Deres nye multimeter, før De går igang med at bruge produktet, bedes De læse denne brugsanvisning grundigt. I. ANVENDELSE Dette kategori III multimeter kan anvendes til
Digital positioner type RE 3446
 Installations- og driftsvejledning IN145 Digital positioner type Indholdsfortegnelse: Side 1 Generel information 2 2 Montering og tilslutning 2 3 Idriftsættelse 3 4 Drifts funktioner 6 5 Funktions beskrivelser
Installations- og driftsvejledning IN145 Digital positioner type Indholdsfortegnelse: Side 1 Generel information 2 2 Montering og tilslutning 2 3 Idriftsættelse 3 4 Drifts funktioner 6 5 Funktions beskrivelser
Trådløst betjeningspanel Betjeningsvejledning
 Trådløst betjeningspanel Betjeningsvejledning 2017V 1.0 Indhold 02 2 3 Kom godt i gang Pakkens indhold Oversigt / funktioner 5 6 7 8 11 11 12 13 14 15 16 Installation Betjening Brug med nøglebrik Indstillinger
Trådløst betjeningspanel Betjeningsvejledning 2017V 1.0 Indhold 02 2 3 Kom godt i gang Pakkens indhold Oversigt / funktioner 5 6 7 8 11 11 12 13 14 15 16 Installation Betjening Brug med nøglebrik Indstillinger
Installationsmanual Alarm Tilslutningsboks
 Installationsmanual Alarm Tilslutningsboks Side 1 af 6 Indholdsfortegnelse KOM GODT I GANG... 3 UDPAKNING... 3 TILSLUTNING TIL ALARMSYSTEM... 3 TILSLUTNING TIL SENSORER OG EKSTERNE ENHEDER... 4 12V TILSLUTNING...
Installationsmanual Alarm Tilslutningsboks Side 1 af 6 Indholdsfortegnelse KOM GODT I GANG... 3 UDPAKNING... 3 TILSLUTNING TIL ALARMSYSTEM... 3 TILSLUTNING TIL SENSORER OG EKSTERNE ENHEDER... 4 12V TILSLUTNING...
Tilslutning- og programmeringseksempler
 VLT MicroDrive FC 051 Indholdsfortegnelse Forord... 3 Oversigt effekt og styre kreds VLT MicroDrive... 4 Initialisering af frekvensomformeren... 5 Tilslutning af motorbeskyttelse... 6 Start/stop med analog
VLT MicroDrive FC 051 Indholdsfortegnelse Forord... 3 Oversigt effekt og styre kreds VLT MicroDrive... 4 Initialisering af frekvensomformeren... 5 Tilslutning af motorbeskyttelse... 6 Start/stop med analog
X88S. SMS fjernstyring til sommerhuse
 X88S SMS fjernstyring til sommerhuse X88s er en GSM/SMS baseret fjernstyring med: 6 indgange 8 relæudgange 2 temperaturfølere Billig i drift, intet abonnement. Kan køre på taletidskort. Nem og hurtig montering.
X88S SMS fjernstyring til sommerhuse X88s er en GSM/SMS baseret fjernstyring med: 6 indgange 8 relæudgange 2 temperaturfølere Billig i drift, intet abonnement. Kan køre på taletidskort. Nem og hurtig montering.
Elektrisk & Automatisk kædeslibeanlæg
 Elektrisk & Automatisk kædeslibeanlæg Art nr: 75700675 EAN nr: 5709133750688 1 af 9 230 / 50Hz / 85Watt 5300 Diameter.108mm Huldiameter.23mm 35 til højre og venstre 1/4 + 3/8 Ca. 2,1kg Øvrige Sikkerhedsforanstaltninger
Elektrisk & Automatisk kædeslibeanlæg Art nr: 75700675 EAN nr: 5709133750688 1 af 9 230 / 50Hz / 85Watt 5300 Diameter.108mm Huldiameter.23mm 35 til højre og venstre 1/4 + 3/8 Ca. 2,1kg Øvrige Sikkerhedsforanstaltninger
KODETASTATUR MED PROXIMITY LÆSER 125KHZ STANDARD. Varenr. 2000.1615 Valgfri kodelængde 2-6 cifre 2x6 trykknapper med blåt lys
 KODETASTATUR MED PROXIMITY LÆSER 125KHZ STANDARD 16.11. 2015 Varenr. 2000.1610 Valgfri kodelængde 2-6 cifre 3x4 trykknapper med blåt lys Varenr. 2000.1615 Valgfri kodelængde 2-6 cifre 2x6 trykknapper med
KODETASTATUR MED PROXIMITY LÆSER 125KHZ STANDARD 16.11. 2015 Varenr. 2000.1610 Valgfri kodelængde 2-6 cifre 3x4 trykknapper med blåt lys Varenr. 2000.1615 Valgfri kodelængde 2-6 cifre 2x6 trykknapper med
Tevion Powerbank. Manual
 Tevion Powerbank Manual Indhold Din Universal Tevion Powerbank... 3 Hvad er inkluderet i pakken?... 3 Advarsler... 5 Delenes navne... 6 Pleje og Vedligeholdelse... 6 Betjening... 7 Fejlfinding... 10 2
Tevion Powerbank Manual Indhold Din Universal Tevion Powerbank... 3 Hvad er inkluderet i pakken?... 3 Advarsler... 5 Delenes navne... 6 Pleje og Vedligeholdelse... 6 Betjening... 7 Fejlfinding... 10 2
Monteringsvejledning. Q-Safe. Version 201502 Dokument 841684
 Monteringsvejledning Q-Safe Version 201502 Dokument 841684 INDHOLD 1. Sikkerhedsforskrifter 6 1.1. Generelt 6 1.2. Tjekliste for sikkerhed 6 1.3. Nomenklatur 6 2. Kontrol af leveringens indhold 7 2.1.
Monteringsvejledning Q-Safe Version 201502 Dokument 841684 INDHOLD 1. Sikkerhedsforskrifter 6 1.1. Generelt 6 1.2. Tjekliste for sikkerhed 6 1.3. Nomenklatur 6 2. Kontrol af leveringens indhold 7 2.1.
Brugervejledning Side 1
 Deluxe trådløs relæboks Brugervejledning www.gsmteknik.dk 04.06.2019 Side 1 Indholdsfortegnelse 1. Tekniske specifikationer 3 2. Indkodning med alarm 4 3. Indkodning af RFID brikker. 5 4. Sletning af RFID
Deluxe trådløs relæboks Brugervejledning www.gsmteknik.dk 04.06.2019 Side 1 Indholdsfortegnelse 1. Tekniske specifikationer 3 2. Indkodning med alarm 4 3. Indkodning af RFID brikker. 5 4. Sletning af RFID
INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER
 INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER INSTALLATIONS MANUALEN SKAL GENNEMLÆSES OMHYGGELIG FØR IBRUGTAGNING ADVARSEL FOR SIKKER INSTALLATION Inden installation af automatikken skal balance fjederen på
INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER INSTALLATIONS MANUALEN SKAL GENNEMLÆSES OMHYGGELIG FØR IBRUGTAGNING ADVARSEL FOR SIKKER INSTALLATION Inden installation af automatikken skal balance fjederen på
trådløs dørklokke brugervejledning yderligere information på www.phonicear.dk
 trådløs dørklokke DK brugervejledning yderligere information på www.phonicear.dk indholdsfortegnelse DETECT DOOR funktion.......................... 1 DETECT DOOR indstillinger....................... 2
trådløs dørklokke DK brugervejledning yderligere information på www.phonicear.dk indholdsfortegnelse DETECT DOOR funktion.......................... 1 DETECT DOOR indstillinger....................... 2
Montørvejledning for DTC2100 Temperaturtyring - Version 1. Generel beskrivelse
 1 2 3 R DTC2100 Danotek Generel beskrivelse DTC2100 er udviklet til væskebaseret solfangersystemer, men kan også benyttes til anden temperatur styring med op til tre temperatur målinger og en relæudgang.
1 2 3 R DTC2100 Danotek Generel beskrivelse DTC2100 er udviklet til væskebaseret solfangersystemer, men kan også benyttes til anden temperatur styring med op til tre temperatur målinger og en relæudgang.
Humantechnik BRUGERVEJLEDNING LA-90
 Humantechnik DK BRUGERVEJLEDNING LA-90 Betjeningselementer Farvestribe Kontrollampe Signalindikator Indbygget mikrofon Power on diode Justering af mikrofon Tændknap Volumenkontrol Slukknap Mikrofon valg
Humantechnik DK BRUGERVEJLEDNING LA-90 Betjeningselementer Farvestribe Kontrollampe Signalindikator Indbygget mikrofon Power on diode Justering af mikrofon Tændknap Volumenkontrol Slukknap Mikrofon valg
SSI GSM PORT kontrol brugervejledning. SSI GSM PORT brugervejledning V1.2
 1 13.04.2015 SSI 6000.0410 SSI 6000.0410 GSM PORT brugervejledning V1.2 Port / Dør åbner via telefon opkald eller SMS - op til 30 brugere SSIHuset Svane Electronic Arildsvej 27, Gråmose, 7442 Engesvang
1 13.04.2015 SSI 6000.0410 SSI 6000.0410 GSM PORT brugervejledning V1.2 Port / Dør åbner via telefon opkald eller SMS - op til 30 brugere SSIHuset Svane Electronic Arildsvej 27, Gråmose, 7442 Engesvang
F75E ORIGINAL BRUGERVEJLEDNING
 F75E ORIGINAL BRUGERVEJLEDNING 2 F75E F 50 BRUG SWEPAC F75E bruges til at pakke grus og sand i forbindelse med mindre byggearbejder såsom underlag for betonblokke eller belægningssten til haver. Maskinens
F75E ORIGINAL BRUGERVEJLEDNING 2 F75E F 50 BRUG SWEPAC F75E bruges til at pakke grus og sand i forbindelse med mindre byggearbejder såsom underlag for betonblokke eller belægningssten til haver. Maskinens
Alarmsystem. INSTALLATIONSVEJLEDNING Kun for kvalificerede teknikere
 10034576 Alarmsystem INSTALLATIONSVEJLEDNING Kun for kvalificerede teknikere ADVARSEL! Producenten fralægger sig ethvert ansvar for og giver ingen garanti i forbindelse med fejl og fejlfunktioner, der
10034576 Alarmsystem INSTALLATIONSVEJLEDNING Kun for kvalificerede teknikere ADVARSEL! Producenten fralægger sig ethvert ansvar for og giver ingen garanti i forbindelse med fejl og fejlfunktioner, der
ELEKTRISK KONVEKTOR RADIATOR 2000 W
 ELEKTRISK KONVEKTOR RADIATOR 2000 W ART NR 330340 EAN NR 5709133330309 LÆS BRUGERMANUAL FØR BRUG. SIKKERHEDSANVISNINGER Læs brugermanualen grundigt igennem før brug. Radiatoren er ikke beregnet til brug
ELEKTRISK KONVEKTOR RADIATOR 2000 W ART NR 330340 EAN NR 5709133330309 LÆS BRUGERMANUAL FØR BRUG. SIKKERHEDSANVISNINGER Læs brugermanualen grundigt igennem før brug. Radiatoren er ikke beregnet til brug
Tårnventilator med FND-display MODELNR.: LF-45R 45
 Tårnventilator med FND-display MODELNR.: LF-45R 45 1 SIKKERHEDSBEMÆRKNINGER Tillykke med købet af denne ventilator. Produktet har gennemgået omfattende kvalitetssikring, og der er sørget for, at du modtager
Tårnventilator med FND-display MODELNR.: LF-45R 45 1 SIKKERHEDSBEMÆRKNINGER Tillykke med købet af denne ventilator. Produktet har gennemgået omfattende kvalitetssikring, og der er sørget for, at du modtager
HN Brugervejledning. Læs brugervejledningen omhyggeligt før multimeteret tages i brug, og gem brugervejledningen til senere brug.
 DIGITAL MULTIMETER HN 7364 Brugervejledning Læs brugervejledningen omhyggeligt før multimeteret tages i brug, og gem brugervejledningen til senere brug. 1 INDHOLDSFORTEGNELSE 1. Introduktion 1.1 Sikkerhedsanvisninger
DIGITAL MULTIMETER HN 7364 Brugervejledning Læs brugervejledningen omhyggeligt før multimeteret tages i brug, og gem brugervejledningen til senere brug. 1 INDHOLDSFORTEGNELSE 1. Introduktion 1.1 Sikkerhedsanvisninger
ODSIF BRUGSANVISNING TIL TIMER TIL MOTORISERET RULLEGARDIN MED FJERNBETJENING. Model: CL-338H
 ODSIF BRUGSANVISNING TIL TIMER TIL MOTORISERET RULLEGARDIN MED FJERNBETJENING Model: CL-338H 1 INDHOLDSFORTEGNELSE 1. Beskrivelse og egenskaber... 3 2. Tekniske data og specifikationer...5 3. Indstilling
ODSIF BRUGSANVISNING TIL TIMER TIL MOTORISERET RULLEGARDIN MED FJERNBETJENING Model: CL-338H 1 INDHOLDSFORTEGNELSE 1. Beskrivelse og egenskaber... 3 2. Tekniske data og specifikationer...5 3. Indstilling
Installationsvejledning
 4P359542-2G Trådløs LAN-adapter Installationsvejledning Trådløs LAN-adapter Installationsvejledning Hjemmeside: http://www.onlinecontroller.daikineurope.com Yderligere oplysninger
4P359542-2G Trådløs LAN-adapter Installationsvejledning Trådløs LAN-adapter Installationsvejledning Hjemmeside: http://www.onlinecontroller.daikineurope.com Yderligere oplysninger
S26 MOTOR Original brugermanual
 S26 MOTOR Original brugermanual Indhold 1. Indledning 1 2. Liste over nødvendigt værktøj 1 3. Sikkerhedspåbud 1 4. Motor montering 2 4.1. Instruktion før montering 2 4.2. Samling af skinne 3 4.3. Opsætning
S26 MOTOR Original brugermanual Indhold 1. Indledning 1 2. Liste over nødvendigt værktøj 1 3. Sikkerhedspåbud 1 4. Motor montering 2 4.1. Instruktion før montering 2 4.2. Samling af skinne 3 4.3. Opsætning
Fjernbetjening Flex Teknisk manual
 Fjernbetjening Flex Teknisk manual VEKA INT. Indblæsnings aggregat 1 Beskrivelse Flex fjernbetjening kan bruges til at styre ventilationsanlæg med V1 og V2 printkort. Tekniske data Knapper på display Knap
Fjernbetjening Flex Teknisk manual VEKA INT. Indblæsnings aggregat 1 Beskrivelse Flex fjernbetjening kan bruges til at styre ventilationsanlæg med V1 og V2 printkort. Tekniske data Knapper på display Knap
Monteringsvejledning. Markise Elektrisk. MoreLand A/S Knullen 22 DK 5260 Odense S Denmark 11.1 Tel+ 45 70 22 72 92 www.moreland.dk post@moreland.
 DK Monteringsvejledning Markise Elektrisk MoreLand A/S Knullen 22 DK 5260 Odense S Denmark 11.1 Tel+ 45 70 22 72 92 www.moreland.dk post@moreland.dk Sikkerhedsforskrifter 1. Det anbefales at markisen monteres
DK Monteringsvejledning Markise Elektrisk MoreLand A/S Knullen 22 DK 5260 Odense S Denmark 11.1 Tel+ 45 70 22 72 92 www.moreland.dk post@moreland.dk Sikkerhedsforskrifter 1. Det anbefales at markisen monteres
DL-45/50/55/60/80 A/B
 CpLy ApS www.cply.dk Brugermanual DL-45/50/55/60/80 A/B Opdateret Vinter 2015 Kære kunde Tak fordi du har valgt at handle hos CpLy ApS. Venligst læs og forstå brugervejledningen før brug, hvis der er noget
CpLy ApS www.cply.dk Brugermanual DL-45/50/55/60/80 A/B Opdateret Vinter 2015 Kære kunde Tak fordi du har valgt at handle hos CpLy ApS. Venligst læs og forstå brugervejledningen før brug, hvis der er noget
Manual. Daray MS70C. - et godt sted at handle. Kirudan varenummer: 61-89-822
 Manual Daray MS70C Kirudan varenummer: 61-89-822 - et godt sted at handle Indholdsfortegnelse 1. Generel beskrivelse... 2 2. Teknisk specifikation... 2 3. Installation... 3 4. Betjening... 10 5. Vedligeholdelse...
Manual Daray MS70C Kirudan varenummer: 61-89-822 - et godt sted at handle Indholdsfortegnelse 1. Generel beskrivelse... 2 2. Teknisk specifikation... 2 3. Installation... 3 4. Betjening... 10 5. Vedligeholdelse...
Sikkerhed note: Når du når den maksimale hastighed af scooteren lyder et advarselssignal og du bør selv reducere din hastighed for at undgå et fald.
 Indhold 1. Indledning... 2 2. Sikkerhed... 2 SIKKERHED Generel information...2 Sikkerhed... 2 Sikkerhedsfunktioner...4 Beskyttelsesudstyr... 4 Idriftsættelse...... 4 Batteri... 5 Opladning af batteriet...
Indhold 1. Indledning... 2 2. Sikkerhed... 2 SIKKERHED Generel information...2 Sikkerhed... 2 Sikkerhedsfunktioner...4 Beskyttelsesudstyr... 4 Idriftsættelse...... 4 Batteri... 5 Opladning af batteriet...
Elektrisk golfvogn 1-7
 Elektrisk golfvogn 1-7 Golfvognsskitse 2-7 Opstart Drej koblingen og skub hjulet på aksen indtil Quick Release røret lukker. Vær opmærksom på forskellen på højre og venstre hjul Tryk foldeleddet, løsgør
Elektrisk golfvogn 1-7 Golfvognsskitse 2-7 Opstart Drej koblingen og skub hjulet på aksen indtil Quick Release røret lukker. Vær opmærksom på forskellen på højre og venstre hjul Tryk foldeleddet, løsgør
BeoLab 8002. Vejledning
 BeoLab 8002 Vejledning Daglig brug 3 Når du har sat højttalerne op som beskrevet på de følgende sider, skal du sætte strøm til hele systemet. Indikatorlampen lyser rødt, hvilket betyder, at højttalerne
BeoLab 8002 Vejledning Daglig brug 3 Når du har sat højttalerne op som beskrevet på de følgende sider, skal du sætte strøm til hele systemet. Indikatorlampen lyser rødt, hvilket betyder, at højttalerne
Hearing Products International BRUGERVEJLEDNING. Echo MegaLoop
 Hearing Products International DK BRUGERVEJLEDNING Echo MegaLoop Indhold Sikkerhedsinstrukser... 3 Oversigt over pakkens indhold... 4 Produktoversigt... 5 Figur 1... 5 Figur 2... 5 Figur 3... 6 Figur 4...
Hearing Products International DK BRUGERVEJLEDNING Echo MegaLoop Indhold Sikkerhedsinstrukser... 3 Oversigt over pakkens indhold... 4 Produktoversigt... 5 Figur 1... 5 Figur 2... 5 Figur 3... 6 Figur 4...
BRUGERVEJLEDNING DK 45 KABEL CTEK COMFORT CONNECT KNAPPEN RESET FEJLLAMPE OPLADERKABEL STRØMLAMPE. CTEK COMFORT CONNECT eyelet M6
 BRUGERVEJLEDNING TILLYKKE med købet af din nye professionelle switch mode-batterilader. Denne oplader indgår i en serie af professionelle opladere fra CTEK SWEDEN AB og repræsenterer den nyeste teknologi
BRUGERVEJLEDNING TILLYKKE med købet af din nye professionelle switch mode-batterilader. Denne oplader indgår i en serie af professionelle opladere fra CTEK SWEDEN AB og repræsenterer den nyeste teknologi
Installations tips & anbefalinger... side 3 M9000 Ledningsdiagram... side 4 CN 1... side 5 CN 2... side 7 CN 3... side 8 CN 4... side 9 CN 5...
 1 Installations tips & anbefalinger... side 3 M9000 Ledningsdiagram... side 4 CN 1... side 5 CN 2... side 7 CN 3... side 8 CN 4... side 9 CN 5... side 9 CN 6... side 9 CN 7... side 9 CN 8... side 9 Fjernbetjenings
1 Installations tips & anbefalinger... side 3 M9000 Ledningsdiagram... side 4 CN 1... side 5 CN 2... side 7 CN 3... side 8 CN 4... side 9 CN 5... side 9 CN 6... side 9 CN 7... side 9 CN 8... side 9 Fjernbetjenings
Hearing Products International BRUGERVEJLEDNING. Echo MegaLoop
 Hearing Products International DK BRUGERVEJLEDNING Echo MegaLoop Indhold Sikkerhedsinstrukser... 3 Oversigt over pakkens indhold... 4 Produktoversigt... 5 Figur 1... 5 Figur 2... 5 Figur 3... 6 Figur 4...
Hearing Products International DK BRUGERVEJLEDNING Echo MegaLoop Indhold Sikkerhedsinstrukser... 3 Oversigt over pakkens indhold... 4 Produktoversigt... 5 Figur 1... 5 Figur 2... 5 Figur 3... 6 Figur 4...
d) Vær opmærksompå risikoen for beskadigelse af ansigt, hænder og fødder.
 Vær opmærksompå risikoen for beskadigelse af ansigt, hænder og fødder.") ADVARSEL SIKKERHED a) Kanttrimmerem må ikke overlades til børn eller umyndige unge, bortset fra unge, som er i lære og under opsyn af fagfolk. b) Der må ikke komme nogen indenfor en radius af 5 meter,
ADVARSEL SIKKERHED a) Kanttrimmerem må ikke overlades til børn eller umyndige unge, bortset fra unge, som er i lære og under opsyn af fagfolk. b) Der må ikke komme nogen indenfor en radius af 5 meter,
Tak fordi du valgte en Keepower NXT batterilader, et valg som afspejler din tekniske viden og evne til at værdsætte kvalitetsprodukter.
 Dansk Dansk Keepower Lader Tak fordi du valgte en Keepower NXT batterilader, et valg som afspejler din tekniske viden og evne til at værdsætte kvalitetsprodukter. Læs betjeningsvejledningen inden opladning.
Dansk Dansk Keepower Lader Tak fordi du valgte en Keepower NXT batterilader, et valg som afspejler din tekniske viden og evne til at værdsætte kvalitetsprodukter. Læs betjeningsvejledningen inden opladning.
BRUGERVEJLEDNING TIL DØRKONTAKT
 BRUGERVEJLEDNING TIL DØRKONTAKT Side 1 til din LOCKON dørkontakt Introduktion Dørkontakten består af en senderenhed og en magnetenhed. Den fungerer sådan, at senderenheden overfører et signal til centralenheden,
BRUGERVEJLEDNING TIL DØRKONTAKT Side 1 til din LOCKON dørkontakt Introduktion Dørkontakten består af en senderenhed og en magnetenhed. Den fungerer sådan, at senderenheden overfører et signal til centralenheden,
BRUGERVEJLEDNING Brændesave
 BRUGERVEJLEDNING Brændesave. FØR IBRUGTAGNING AF PRODUKTET: GENNEMLÆS VENLIGST DENNE VEJLEDNING OMHYGGELIGT Indhold Afsnit Side A Sikkerhedsanvisninger og ulykkesforebyggelse 2 B Retningslinier for ibrugtagning
BRUGERVEJLEDNING Brændesave. FØR IBRUGTAGNING AF PRODUKTET: GENNEMLÆS VENLIGST DENNE VEJLEDNING OMHYGGELIGT Indhold Afsnit Side A Sikkerhedsanvisninger og ulykkesforebyggelse 2 B Retningslinier for ibrugtagning
INSTALLATIONS GUIDE. til Waoo TV-boks AirTies (7210 og 7310) FIBERBREDBÅND TV TELEFONI
 FIBERBREDBÅND TV TELEFONI") INSTALLATIONS GUIDE til Waoo TV-boks AirTies (7210 og 7310) FIBERBREDBÅND TV TELEFONI INDHOLD Velkommen...4 Medfølgende udstyr...6 AirTies (7210 og 7310)...7 Installation...8 Hentning af TV-portal...12
INSTALLATIONS GUIDE til Waoo TV-boks AirTies (7210 og 7310) FIBERBREDBÅND TV TELEFONI INDHOLD Velkommen...4 Medfølgende udstyr...6 AirTies (7210 og 7310)...7 Installation...8 Hentning af TV-portal...12
Brugervejledning E-Fly Nova Dansk Version Brugervejledning DANSK
 Brugervejledning DANSK 1 Indhold Oversigt over dele på el-cyklen... 3 Display E-Fly Nova... 4 Batteripakken... 5 Vedligeholdelse af batteripakken... 5 Garantibestemmelser... 6 10 års reklamationsret...
Brugervejledning DANSK 1 Indhold Oversigt over dele på el-cyklen... 3 Display E-Fly Nova... 4 Batteripakken... 5 Vedligeholdelse af batteripakken... 5 Garantibestemmelser... 6 10 års reklamationsret...