Robotteknologi grundlæggende
|
|
|
- Daniel Kristoffersen
- 7 år siden
- Visninger:
Transkript
1 Robotteknologi grundlæggende
2 Forord. Kompendiet Robotteknologi grundlæggende anvendes som teoribog i forbindelse med: Grundlæggende robotteknik
3 Indholdsfortegnelse. Forord. 2 Indholdsfortegnelse. 3 Robottens historie. 5 Robotten i dag. 5 Hvad er en robot? 6 Definition af en Robot 8 Definition af en industrirobot ifølge ISO Robot mærker: 10 Anvendelses områder: 11 De fysiske ligheder: 11 Program ligheder: 12 Belastlighed og levetid 12 Hvor meget kan en robot belastes med? 12 Hvor lang levetid har en robot? 13 Statistik over robotter 13 Hvad bruges robotterne til i Danmark? 15 Antallet af leverede industrirobotter på verdensplan 15 Opbygning af industrirobot 16 Sikkerheds vejledning 17 Generelle krav. 17 Sikkerhedsniveauer/risikovurdering 17 Indhegning af robottens arbejdsområde. 17 Sikring af låger (el- overvåget) 18 Lysbom, trædemåtter og kontaktplader. 18 Sikkerhedslysbom og lysgitre 18 Sikkerhedsafstand 18 Beregning af sikkerhedsafstand for sikkerhedslysbom. 19 Beregning af sikkerhedsafstande for sikkerhedslysgitter 20 Dødsmandskontakten. (trepositionsholdekontakt) 20
4 Stopanordninger. 20 Nødstop 21 Eksterne nødstop. 22 Sikkerhedsstop (udløst af udstyr) 22 Genstart 22 Programmering med HPE 23 Testning ved arbejdshastighed. (fuld hastighed) 23 Automatisk drift. 24 Frigørelse af fastklemt person 24 Brugsanvisning 24 Sikkerhedsanvisning for robotsystemets betjeningspersonale. 24 Almene sikkerhedsanvisninger 24 Arbejdsbeklædning 25 Sikkerhedsanvisning for installation og drift 25 Før igangsætning 25 Robottens kordinatsystem 26 Programmering 30 Online programmering 30 Simulering af robotbevægelser 30 Off-line programmering 31 Risiko-eliminering: 31 Forståelse og dialog: 31 Fra simulering til programmering: 32 Hvad kræves der for at kunne anvende simulering effektivt? 32 Intelligent programmering 33 Opmåling og scanning af emner 34 Selv- programmering af malerobotter. 34 Manuel bevægelse af robot (JOGGING) 35 Bevægelses typer 36 IO interface 38 Gennemgang af Tool Center Point (TCP) 39 Et præcist defineret TCP letter programmeringen 40
5 Robottens historie. Joe Engelberger indførte i 1961 den første industrirobot i produktionen hos General Motors. Han stiftede firmaet Unimation og regnes for industrirobottens fader. Joe Engelberger har skrevet 2 bøger. I 1980 udkom Robotter i praksis. Bogen er blevet oversat til seks sprog. Joe Engelberger udgav endnu en bog i 1989, Robotter i Servicebranchen. Robotten i dag. På verdensplan investeres der i disse år store summer i at udvikle stadig mere avancerede robotter. Robotter som enten selvstændigt eller i samspil med mennesker kan løse mere og mere avancerede opgaver og funktioner. Robotterne omtales ofte som intelligente, men sammenlignet med mennesker og dyr lader teknisk intelligens stadig meget tilbage at ønske. Selv de mest avancerede robotter når i dag langt fra op på niveau med mennesker og dyr, og nogle vil hævde, at robotter slet ikke er intelligente endnu og da slet ikke intelligente i menneskeligforstand. Det er først når mennesker programmere robotterne at de kan løse ensartet arbejdsopgaver.
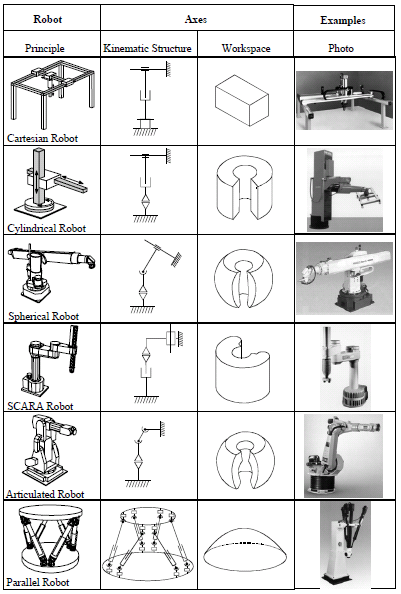
6 Hvad er en robot? De fleste mennesker kan sagtens genkende en robot, når de ser én, hvad enten det er på film eller i virkeligheden. Men hvad er en robot egentlig? Her er vist et lille uddrag af de mest kendte robotter. Ordet robot kommer af det tjekkiske ord robota, der betyder slavearbejder eller hoveriarbejder. En robot er en programmerbar maskine, der ved interaktion med sine omgivelser autonomt kan udføre en mangfoldighed af opgaver. En fuldt autonom robot kan selv regulere sin adfærd og er et funktionelt system, som er selv opretholdende. Der er forskel på robotter. Der er selvfølgelig dem på film og så alle de virkelige robotter. Her i dette kompendium adskiller vi servicerobotter fra industrirobotter. Servicerobotter er gerne robotter der servicerer os mennesker. Det kan være en støvsuger, plæneklipper eller en operations-robot. Et kendetegne for en servicerobot er, at den arbejder i den virkelige verden, den kan være mobil, og så har den for det meste komplekse programmer.
7 Et eksempel på en servicerobot er denne operationsrobot. Robotten står og opererer på Aalborg sygehus. En industrirobot er stationær eller mobil og arbejder på et afgrænset område. Den arbejder i rimelige stabile omgivelser og har programmer som kan programmeres af almindelige mennesker. Et eksempel på en industrirobot
8 Definition af en Robot Der er mange fabrikater og typer på industrirobotter, men en industrirobot kan ingenting hvis den ikke er programmeret. En industrirobot har 3 handicaps: Den er dum Den er blind Den er enarmet Derfor er definition af hvad en industrirobot er, at den skal opfylde følgende krav: Den skal være enkel at programmere Den skal have hukommelse. Den skal kunne arbejde selvstændigt. Den skal kunne udføre flere forskellige arbejdsopgaver. Definition af en industrirobot ifølge ISO 8373 En industrirobot er en automatisk styret, reprogrammerbar, bredt anvendelig manipulator, som enten er fikseret på et sted eller mobil og som bruges til industrielle automationsløsninger. Se oversigt på næste side.
9 ISO 8373
10 Robot mærker: ABB Adept ASIMO asimo.honda.com/asimo Bosch Cloos Camau Denso Durr Epson Fanuc IGM Kawasaki Kobelco Kuka Mitsubisi Motoman Nachi Panasonic Reis Stäubli Tricept Universal robots Yamaha Dansk robotforening
11 Anvendelses områder: Som eksempler kan nævnes: Metal industrien Træ industrien Automobil industrien Medicinal industrien Fødevare industrien Værft industrien Vindmølle industrien Container industrien Landbrugs industrien De fysiske ligheder: Fællesnævner i forbindelse med de forskellige mærker af robotter. Industrirobotten har nogle fælles træk som går igen på flere af de mest anvendte robotter. Selve robotten består af tre til seks bevægelige led som styres af nogle resolvere. Nogle af robotterne er hurtigere end andre, dvs. at bevægelses hastigheden kan være afhængig af størrelsen af robotten. Robottens størrelse vælges ud fra det emne den skal håndtere inkl. Værktøj. Størrelsen kan også afhænge af rækkevidden, dvs. jo længere robotten skal nå ud jo større skal robotten være. En anden lighed som robotterne deler, er koordinatsystemet X, Y, Z. Dette bruges som udgangspunkt eller referencepunkt for alle positioner som gemmes i programmet.
12 Program ligheder: Robotterne programmeres via en håndprogrammerings boks! En såkaldt Teach Pendant. Denne bruges mest til manuel programmering og til manuelt bevægelse af robotten. Ved større programmerings opgaver kan man med fordel bruge pc er med offline software. Både brugen af teach pendant og pc en kan anvendes ved de fleste robotter. Fordelen ved at bruge pc er, er en større brugerflade, tekster er nemmere at taste ved brugen af en editor, lagerkapaciteten er større og offline software kan anvendes til grafisk animationer af robot simulering. Belastlighed og levetid Hvor meget kan en robot belastes med? Det afhænger af hvad den skal bruges til. Bruges den f.eks. til håndtering af tunge emner med høj bevægelses hastighed, vil nedslidningen forøges i forhold hertil. Bruges den til bearbejdning, hvor robotten selv fastholder det emne der bearbejdes på, vil den altid forsøge at fastholde den aktuelle position, som den er blevet programmeret med, ved konstant at kører med motorer under f.eks. en slibe proces, og derved vil robotten blive hårdt belastet. En ABB robot af typen IRB2400/16 kan belastes med 16 kg. på den 6 akse på flangen, men selve robotten vejer 380 kg. Det betyder ikke at robotten kun kan løfte 16kg, men at det er tale om det antal kg som den kan transportere ved fuld hastighed. Hvis man alligevel sætter den til at transportere mere en de 16 kg og forsøger at køre fuld speed, vil robotten afbryde bevægelsen fordi motoren som er mest belastet vil slå fra i overload.

13 Hvor lang levetid har en robot? Ved god vedligeholdelse og jævnlig service af en robot, kan den holde rigtig længe. Der er måske nærmere tale om at modellerne skifter med færre og færre år imellem. Typisk kommer der nye modeller for hver femte år, men udviklingen går stærkt og efterspørgselen stiger i takt med at priserne bliver lavere og lavere. Statistik over robotter Antal installeret robotter pr. år i Danmark Statistik fra DIRA Væksten i robotbestanden i Danmark i 2009 har været 5 %. Vi kan konstatere at investeringerne i automatisk produktionsudstyr, herunder robotteknologi i Danmark i 2009 er væsentligt reduceret i forhold til den seneste 5 års periode, der har været præget af salgsrekorder år efter år.
14 Der er i 2009 investeret for ca mio. kr. i komplette robotbaserede produktionsanlæg i Danmark. Hertil kommer investeringer i de produktionsanlæg, der arbejder uden robotter. Tal der er validerede fra Teknologisk Institut viser, at der blev installeret 241 industrirobotter i automatiske produktionsanlæg i Danmark i 2009 mod 507 året før. Hvad angår robottætheden i industrien haler vi ind på de større industrilande omkrig Danmark for øjeblikket. Væksten i robotbestanden i Danmark i 2009 har været ca. 5 %, og akkumuleret ligger standen på minus de robotter, der gennem tiden er udfaset. Dvs. at der p.t. er i alt ca robotter i arbejde i Danmark, og de fleste arbejder i døgndrift. En del brugte robotter er taget i genanvendelse under finanskrisen i Industrivirksomhederne kigger for øjeblikket meget på, hvordan man optimerer sin produktion uden for store nyinvesteringer. Her er der et hav af forskellige individuelle forhold at tage hensyn til. Fælles for de allerfleste produktionsvirksomheder er dog at de har et stort behov for at finde nye metoder til at effektivisere fremtidens produktion - for gode, effektive fabrikker er altafgørende for omsætning, indtjening og fremtidig konkurrenceevne, uanset hvordan man har fordelt produktionen globalt. Produktionsvirksomhedernes begrænsninger i investeringerne har medført, at der i 2009 har været negativ vækst i maskinbygningsbranchen. Den del af automatikbranchen der arbejder med performance måling i produktionen, har derimod haft gode tider med meget at lave. Dette skyldes at effektive OEE-målesystemer er vigtige for øjeblikket, idet industriens konkurrenceevne kommer via automatisering, performance og optimering. Danske industrivirksomheders konkurrenceevne er meget centralt placeret i den offentlige debat om hvordan man finder vejen ud af krisen, og der er mange der har den opfattelse at automatisering og industriel IT kan være med til at forbedre konkurrenceevnen, og dermed medvirke til at sikre arbejdspladser og en innovativ udvikling i Danmark.

15 Hvad bruges robotterne til i Danmark? Her kan man se at langt størsteparten af robotterne bliver brugt til håndtering, dvs. flytte emner. Antallet af leverede industrirobotter på verdensplan Her kan man se at langt de fleste robotter står i asien.
16 Opbygning af industrirobot Hvad skal der til for at en robot kan anvendes til produktion og hvilket udstyr kan anvendes? Når man køber en robot får man den rå robot med styreskab og programmeringsboks! men der skal mere til for at den kan anvendes til præcis det som virksomheden ønsker den skal bruges til. Værktøj og andet udstyr som: griber, vaccumåg, manipulator (drejebord), svejseudstyr, rensestation, bullseye, automatisk værktøjsskift, sikkerhedsudstyr, afskærmning, lyd isolering, pcer, fikstur, pneumatisk udstyr, hydraulik, vision udstyr, laser opmåling, scanning, er bare nogle af de ting som anvendes i dag. Det er fra starten vigtigt at placering af robotten i arbejdscellen er korrekt, da sikkerhedsafstanden fra indhegningen skal overholdes. Ligeledes skal robotten kunne nå ud til alle fikspunkter som maskiner og andet serviceudstyr. Når robotten skal fastgøres i gulvet, er det vigtigt at få den justeret, således at aksebevægelserne X og Y er helt vandrette, for at få et perfekt samarbejde med offline softwaren. Dvs. at hvis der er lavet et program på pcèren med offline simulering ville det være optimalt hvis robotten ville bevæge sig nøjagtig på samme måde! det letter optimeringen og sparer tid. På grund af robottens vægt, vil der også være krav til stativet den monteres i. Hvis robotten bevæger sig hurtigt, vil der opstå vibrationer. Selv når stativet er solidt, er der en risiko for at det bevæger sig ganske lidt, hvorfor robotter typisk er monteret med bolte ned i gulvet. Kabler og lufttilførsel bør overvejes grundigt, måske skal der laves en gulvmontage med udfræsninger i gulvet. Evt. mulighed for udvidelse til flere robotter som skal samarbejde Godt arbejdsmiljø: god udluftning, god belysning til programmering, udsugning i forbindelse med svejsning, afskærmning mod blænding og støj. Omstillingsfleksibilitet er også et vigtigt punkt som bør nøje overvejes.
17 Sikkerheds vejledning Under robotanlæggets opbygning og placering, tager man hensyn til det sikkerheds- og ekstraudstyr der skal indgå i anlægget. Sikkerhedsudstyret skal være tilpasset det aktuelle robotanlæg. Personsikkerhed og produktion skal koordineres for at øge sikkerheden i anlægget. Dette betyder at de anvendte sikkerhedsfunktioner skal produktionstilpasses, således at produktionen efter stop kan genstartes på en enkelt og sikker måde. Dette er både et produktions og et sikkerhedskrav, idet en besværlig genstart kan give anledning til omgåelse af sikkerhedsforanstaltningerne. Nedenstående er nogle af hovedpunkterne trukket frem, der henvises til arbejdstilsynets vejledninger for evt. ændret / opdateret materiale. Generelle krav. Bortfald samt tilbagekomst af energi må ikke føre til farlige funktioner. Automatiske maskinanlæg skal have en personbeskyttelse, som er tilpasset stoptid og bremselængde for anlægget samt for enheder heraf. Beskyttelsesanordningen skal forhindre at en person kan komme ind i farezonen, samt at materialer og værktøj kastes ud og derved kan forårsage personskade. Dette bestemmes af arbejdstilsynet i en At-Vejledning -B.1.4 der hedder: Automatisk styrede maskinanlæg, inklusive industrirobotanlæg. De mest almindelige sikkerhedsanordninger, omfatter følgende. Sikkerhedsniveauer/risikovurdering Ifølge loven skal enhver maskine risikovurderes se EN Der skal foretages en risikovurdering for at fastslå, hvilke sikkerhedstiltag der skal tages, og hvilken afskærmning og ændringer der evt. skal til for at forbedre maskinens sikkerhed. Maskinen skal også vurderes for at fastslå, hvilket sikkerhedsniveau den tilhører. Indhegning af robottens arbejdsområde. Sikkerhedshegnet er konstrueret til at modstå alle forudseelige driftsmæssige og miljøbestemte situationer, der måtte opstå. Hegnet skal være konstruerede således at der ikke er farer for at emner og værktøjer kan slynges ud, samt beskytte mod blænding, stråling (svejsning), vandstrålebearbejdning og støj. Sikkerhedshegnets normalhøjde er 1.8 m med en friåbning over gulv på max. 0.3m.

18 Sikring af låger (el- overvåget) Hegnet hindrer adgang til sikkerhedsområdet, undtagen gennem indgange, der er udstyret med el- overvåget kontakter. Denne overvågning af låger gør at robotten kan køre så længe lågen er lukket, hvis lågen åbnes under drift, skal nødstop funktionerne aktiveres. Lysbom, trædemåtter og kontaktplader. Berøringsfrie beskyttelsesanordninger, lysbom og trædemåtter giver ingen beskyttelse mod udslyngning af materialer og værktøjer. Anvendes lysstråler, fotocelleanlæg med enkelstrålet lyssender og modtager (lysbom) skal der normalt anvendes 2 eller 3 lysstråler. Afstanden imellem strålerne er henholdsvis: 2 stråler 0.4m over gulv og 1.0m. 3 stråler er afstanden 0.3m over gulv, 0.7m og 1.1m. Trædemåtter og kontaktplader skal placeres foran og i fareområdet således, at man ikke kan passere uden om dem eller skræve over dem. Til sikkerhedsafstanden skal tillægges en skridtafstand på 0,6 m. Sikkerhedslysbom og lysgitre Sikkerhedsafstand Grundprincippet er, at farlige maskinbevægelser skal stoppes, inden nogen når frem til risikoområdet. I tal betyder det, at en lysbom skal placeres mindst 850 mm fra risikoområdet. Ved udregning af den rette afstand skal man tage hensyn til maskinens stoptid og til risikoniveauet. Lysgitre adskiller sig fra sikkerhedslysbom ved at have mange stråler, hvor sikkerhedslysbom primært kun har en stråle.
19 Beregning af sikkerhedsafstand for sikkerhedslysbom. Ved brug af sikkerhedslysbom til sikring af farlige maskiner skal følgende forhold tages i betragtning: Der skal etableres lysbomme i to niveauer; 400 mm og 900 mm over referenceplanet. 1. Lysbommene skal monteres i korrekt sikkerhedsafstand S i forhold til faren på maskinen. 2. Sikkerhedsafstanden S beregnes ud fra følgende formel, jvf. pr EN 999: Tm er maskinens stoptid Tl er sikkerhedslysbommens reaktionstid i sekunder. Eksempel: En robot med en stoptid på sek. (75 millisek.) er sikret mod personulykke med en sikkerhedslysbom der har en reaktionstid på sek. (15 millisek.). Sikkerhedsafstanden S kan herefter beregnes til: S = 1600 mm/s x ( ) mm S = 144 mm mm S= 994 mm. S = 1600 mm/s x (Tm + Tl) mm
20 Beregning af sikkerhedsafstande for sikkerhedslysgitter Ved brug af sikkerhedslysgitter med en maksimal opløsning på 40 mm til sikring af farlige maskiner beregnes sikkerhedsafstanden S ud fra følgende formel, jvf. pr EN 999: Tm er maskinens stoptid Tl er sikkerhedslysgitterets reaktionstid i sekunder d er sikkerhedslysgitterets opløsning. Sikkerhedsafstanden S må ikke være mindre end 100 mm. Såfremt sikkerhedsafstanden S beregnes til at være større end 500 mm, er det muligt at benytte følgende formel til beregning af sikkerhedsafstanden. I dette tilfælde må sikkerhedsafstanden S ikke være mindre end 500 mm: S = 2000 mm/s x (Tm + Tl) + 8(d-14 mm) S = 1600 mm/s x (Tm + Tl) + 8(d-14 mm) Dødsmandskontakten. (trepositionsholdekontakt) Dødmandsholdekontakten anvendes som aktiveringskontrol. Når Teach Pendanten aktiveres, kan robotten kun bevæges, når denne kontakt er trykket ind til midterste stilling, hvis kontakten trykkes i bund eller slippes standser robotten med det samme. Stopanordninger. DS/EN ISO har afløst DS/EN 954-1, som anvender de velkendte sikkerhedskategorier: B, 1, 2, 3 og 4. Det gør DS/EN ISO også. Men derudover introduceres begreber som PL-niveau (det sikkerhedsniveau som et styresystem overholder), MTTFd (middel til farlig fejl) og DC (Diagnostisk dækning, systemets evne til at finde fejl i sig selv). Det gode gamle risikodiagram fortæller, at jo farligere maskinen er, jo højere sikkerhedskategori skal man bruge for at være sikker på, at maskinen er sikker. Man har ikke smidt systemet ud omkring kategorierne i DS/EN ISO Men nu bruger man kun kategorierne til at beskrive, hvordan systemet skal opbygges, og hvilke egenskaber sikkerhedssystemet skal have. Med DS/EN ISO har man beholdt risikodiagrammet. Men nu får man et udtryk på, hvor stor en risikonedsættelse man skal have, før maskinen er sikker. Man finder sit PL-niveau ud fra de tre parametre; alvorlighed af tilskadekomst, hyppighed og mulighed for at undgå faren.

21 Når man har fundet sit PL-niveau, kan man gå ned i de 12 løsninger og få et eksempel på, hvordan en sikkerhedsløsning kan se ud. Løsningerne fra 1-3 er vist med nødstop. Resten af eksemplerne er løsninger vist med en lågekontakt. Gå ind på for at se de 12 løsninger. Nødstop Robotten har følgende nødstopmuligheder: To nødstopkontakter (installeret på operatørpanelet og Teach Pendanten )
22 Eksterne nødstop. Produkttilpasset stop (udløst af HOLD knappen) Et programstop, beregnet til stop af produktionsprocessen i et for arbejdsoperationen naturligt leje, og således at genstart kan ske uden andet indgreb end at give et nyt startsignal. NB. Produktionstilpasset stop skal overgå til sikkerhedsstop, hvis en person går ind i farezonen. Sikkerhedsstop (udløst af udstyr) Stopsignal fra sikkerhedsanordning når operatøren, efter påvirkning af programstoppet, bevæger sig ind i farezonen og derved påvirker lågekontakt, lysgitter, lysbom, nødstop, trædemåtte eller andet. Ved genstart kan arbejdet fortsættes fra stoppunktet. Husk at kvittere for fejlen i fejlmeldingsvinduet inden genstart.!!!!!!! Således forhindres utilsigtet start uanset fejl årsagen. Robotanlæg og enheder heraf skal let, hurtigt og sikkert kunne stoppes med nødstop, hvis ukontrolleret farlige situationer opstår i anlægget. Nødstop skal fungere ved alle driftsmåder, også når en del af anlægget er frakoblet. Nødstopanordninger skal blive i stopstilling, indtil manuel tilbagestilling foretages. Nødstopanordninger skal være fastmonteret. Ved aktivering af nødstop skal farlige efterløbsbevægelser standses ved: bremsning og eller kontrastyring mekanisk spærring. Automatiske fikseringsanordninger som gribere, vaccum åg og andre holdefunktioner skal bevare deres holdefunktion. HPE skal være forsynet med nødstop. Både nødstop og sikkerheds stop kræver at bremsefunktionen på de forskellige akser fungerer øjeblikkeligt når de aktiveres. Dette indebærer at kraften i motorerne brydes og bremserne aktiveres således at robotten bringes til et øjeblikkeligt stop. Sikkerheds systemet er således opbygget, at hurtig og problemfrit genstart af robot systemet muliggøres. Genstart Genstart efter sikkerhedsstop må kun ske manuelt med den normale startanordning efter påvirkningen af en tilbagestillingskontakt (reset), som skal være placeret således, at den ikke kan nås af en person, der befinder sig i farezonen.
23 Programmering med HPE Programmering med HåndProgrammeringsEnheden inden for det af sikkerhedssystemet afgrænsede område kan finde sted, når følgende betingelser er opfyldt. De farlige robotbevægelser må kun kunne styres via holdekontakter med dødmandskontakt på HPE ( fx samtrykkekontakt og plus og minus taster). Hastigheden er reduceret til ca mm/sek. Testning ved arbejdshastighed. (fuld hastighed) Skal der køres testprogrammer ved arbejdshastighed med en person inden for afgrænset område, kan dette foregå fra et observationsområde hvorfra farlige bevægelser kan styres med håndbåret holdekontakt (trepositionsholdekontakt) eller HPE håndprogrammeringseehed.(dødmandskontakt holdes inde). Et observationsområde er et område hvor robotten ikke kan nå pga. softwarelimitswitche og / eller tvangspåvirkede endestopkontakter.(indstillelige stopanslag).
24 Automatisk drift. Anordning til opstart af automatisk drift skal være placeret uden for det område, som er sikret ved sikkerhedsudstyr. Automatisk drift må først indledes: Når sikkerhedsudstyrets beskyttende funktion er effektiv og når der ikke befinder sig personer inden for det af sikkerhedsudstyret afgrænsede område. Frigørelse af fastklemt person Anlægget skal være udført således, at en person, som er fastklemt, kan frigøres hurtigt og sikkert. Følgende metoder kan anvendes: Omkobling fra automatik til manuel styring. Anordning som kan igangsætte en sikker returbevægelse (eks. HOME) Manuel frigørelse af energipåvirkede bremser under forudsætning af, at en vægtafbalancering forefindes. Brugsanvisning Der skal medleveres en brugsanvisning på Dansk med alle sikkerhedsmæssige oplysninger om installation, opstilling, drift og vedligeholdelse. Sikkerhedsanvisning for robotsystemets betjeningspersonale. For enhver som arbejder med robotsystemet som f.eks. personale for installation, drift og vedligeholdelse skal personsikkerheden gives første prioritet. Almene sikkerhedsanvisninger I nærheden af robotten skal der udvises forhøjet opmærksomhed og sikkerhedsanvisningerne skal overholdes. Uforsigtige bevægelser og støj osv., der kan trække personalets opmærksomhed væk fra robotsystemet, bør undgås. Bevæg ikke robotsystemet med vold. Anvend kun manipulatoren ifølge dens specifikationer. Læn Dem ikke mod styringen, så knapper ubemærket og utilsigtet kan blive trykket. Sæt ikke styringen i drift uden tilladelse. Sørg for sikker passage til og fra arbejdsområdet. Manipulatoren skal have sit eget, sikrede arbejdsområde. I umiddelbar nærhed af manipulatoren er der forhøjet ulykkesrisiko. Div. Advarselsskilte på robotsystemet skal overholdes. Uvedkommende personer bør ikke opholde sig ved robotsystemet.
25 Arbejdsbeklædning Ved arbejdet med bevægelige maskiner kan beklædningen være en afgørende sikkerhedsfaktor. Uegnet beklædning kan forøge ulykkesrisikoen. Af sikkerhedsgrunde bør det derfor anbefales at benytte fornuftig arbejdsbeklædning. Sikkerhedsanvisning for installation og drift Ved installation og igangsætning skal følgende sikkerhedsanvisninger iagttages: Robotten må kun programmeres og igangsættes af personale, som er trænet i det. Sikkerhedsrepræsentanten må sørge for at personalet får rigelig tid til oplæring så anlægget kan arbejde korrekt og sikkert. Ved programmering skal der udvises særlig forsigtighed, da man herunder er nødt til at opholde sig i manipulatorens arbejdsområde. Før igangsætning Før igangsætningen skal alle sikkerhedsanordninger som lysbomme, sikkerhedshegn, beskyttelsesplader og eventuelle anordninger til svejsning være installeret/aktiveret, så robotsystemet stopper i en faresituation. Arbejdsområdet kontrolleres for eventuelle sikkerhedsrisici, og disse udbedres i givet fald før indkobling af anlægget.
26 Robottens kordinatsystem Når vi snakker industrirobotter kan de fås fra 1 akse eller motor eller frihedsgrad og til 6 akser eller 6 frihedsgrader. 6 frihedsgrader giver optimal frihedsgrad. Dog kan der påmonteres slæder eller skinner så der opnås flere frihedsgrader. 6 frihedsgrader
27 Alle positioner i et robotprogram er gemt i rektangulære koordinater ( X, Y, Z, værdier ) Dette koordinatsystem er forbundet med andre koordinatsystemer sådan at forstå at en position på et emne, refererer via værktøjs- og håndleds koordinatsystemet ned til sokkel koordinatsystemet. Værktøjskoordinatsystem er defineret i flange koord Flangekoordinatsystemet ligger fast og er indbygget i robotten Worldkoordinatsystemet ligger ligeledes fast i soklen på robotten. Basekoordinatsystemet er defineret i world.
28 Her ses hvor servomotoren sidder på en industrirobot. Servomotor med Pulskoder og Bremse Akse 3 Akse 4 Akse 2 Akse 5 Akse 6 Akse 1 Reduktionsgear Sokkel
29 Hver akse har deres Z, X og Y koordinatsystemer, også kaldet højrehåndsreglen X Y Z Det vil sige, at hvis vi skal fra en akse til en anden skal koordinaterne lægges sammen Her vises en udregning i robotten. Udregningerne sker i transformationsmatricer. A A T T C A C A C B B C a a T a a a a T a a T a a a a a a a a a a a a a14 a 24 b a 34 b a44 a a a a b b b b a a a a b b b b b14 b 24 b 34 b44 a a a a a a a a
30 Programmering Konventionel Online programmering Simulering af robotbevægelser og programafvikling. Offline programmering Intelligent programmering Online programmering Manuel programmering via Hånd programmerings enheden Teach programmering foregår ved, at man ved hjælp af en programmerings boks også kaldt Teach box, Online fjernstyrer robotten rundt langs den bane, man ønsker den skal følge. Man opbygger robotprogrammet ved at, manuelt styre robotten hen til en position som den skal huske som et indlært punkt ud fra et X, Y, Z koordinatsystem på robotten. Man viser den hvor alle positioner er og i hvilken rækkefølge disse skal eksekveres. Robotter er fleksible programmerbar maskiner. Imidlertid betyder det ikke at omstillingstiden fra et produkt til et andet er lille. Tager en virksomhed mange nye produkter ind, vil der være mange tilretninger af fixtur, sensor systemer og programmering af robotter samt PLC systemer. Det betyder at produktionen kan ligge stille en stor procent del af tiden. Simulering af robotbevægelser Anvender man CAD baseret robot simulering, der ofte tilbydes af robotleverandørerne i tilknytning til robotten, er det muligt at henlægge meget arbejde til disse systemer. En robot programmør vil på forhånd kunne løse problemer med program opbygning, proces studier, fikstur undersøgelser, layoutplanlægning, kollision, cyklustider og om en robot kan have svært ved at komme ind i et fikstur eller visse områder på et emne, som kan give problemer med robottens bevægelses frihed. På den måde spares der meget værdifuld tid, der kan anvendes til produktion og dermed øget indtjening. Har man ved simulering afklaret valget af robotstørrelse er det således muligt at indhente tilbud fra leverandører og sparer mange pilottests. Mange af robot simulerings systemerne er optimeret mod flere proces områder. Det betyder at det er relativt hurtigt at løse problemstillinger indenfor lysbue-, modstandssvejsning, maling og håndtering med disse værktøjer med en grundighed, der ellers ville være svært at opnå.
31 Off-line programmering Off-line programmering kan godt gå hurtigere end traditionel teachprogrammering. Men essensen er, at der ikke lægges beslag på robotanlægget. Den store gevinst ligger i sparet forrentning af et dyrt anlæg og fremskyndet indtjening på anlægget. Nye programmer kan ligeledes opbygges og afprøves uden at produktionen forstyrres. Programmeringen kan begynde på PC en længe før robotanlægget er færdig med den forrige produktion. Når programmeringen kan forberedes, undgår man forhastet indkøring og opnår et bedre resultat. Der er ingen forskel på selve robotprogrammet, hvad enten det er teach et eller offline programmeret, men man opnår ofte en bedre struktur i offline, fordi man lettere kan indtaste proces informationer som en robot operatører kan gøre brug af f.eks. til fejlfinding ved driftstop. Risiko-eliminering: Automationsprojekter har mange risiko-momenter i projekteringsfasen. F.eks. faren for et uheldigt system-layout: Kan robotten nå alle punkterne i den rette orientering? Eller dårlig performance: Vil emnefiksturet være i vejen for robotten? Kan cyklus tiden reduceres? Simulering af systemfunktioner kan eliminere mange risici. Forståelse og dialog: Når grafisk animering bruges i salgsfasen til præsentation af et nyt koncept, opnås en fælles og dybere forståelse. Simuleringen er jo både intuitiv og konkret og den danner grobund for frugtbar dialog. Kunden vil bedre forstå dit produkt og dets fordele.
32 Fra simulering til programmering: Kan man først simulere et system, så er der ikke langt til programmeringen af det. Derfor er simulering også en naturlig del af robot offline programmering. Hvorfor anvende simulering i produktionsforberedelsen? Simulering i produktionsforberedelsen er en overset kilde til effektivisering og minimering af fejl. Simulering giver et beslutningsgrundlag, på et tidligt tidspunkt, der gør det muligt at forcere og parallelisere opgaver. En rational faglig beslutning kræver en vis viden. Denne viden kan være baseret på erfaring, men er der tale om nye opgave som f.eks. tilbud på underleverandør arbejde, eller indkøb af udstyr, er man måske på gyngende grund. Beslutninger foretaget på spinkelt grundlag kan blive en virksomhedsruin. Anvendelsen simulering kan på virksomhedens makro niveau anvendes i produktions planlægningen til kapacitets fastlæggelse, økonomisk prioritering af opgaver og vurdering af flaskehalse. Denne type simulering kaldes produktions flow simulering eller diskrete event simulering. Flow simulering er efterhånden begyndt at vinde indpas i industrien. Hvad kræves der for at kunne anvende simulering effektivt? Simulering øger beslutningsgrundlaget og kommunikationen i virksomheden. På et tidligt tidspunkt i design processen er det muligt at verificere produktionsgrundlaget og komme med feed-back til udviklingsafdelingen om at foretage ændringer i produktet, frem for at opleve disse ting i en 0-serie produktion. Simulering kræver data disciplin og motiverede medarbejdere der har lysten til at anvende computere som et redskab. På virksomhedens makro niveau, er det nødvendigt at have et statistik produktionsgrundlag med kendskab til proces-, klargørings- og transport-tider for de enkelte maskiner m.m. for at kunne anvende produktions flow simulering. Hvis virksomheden ikke har dette grundlag vil de omleve det som et klarsyn at få skab dette kendskab til deres produktion.
33 Ved anvendelsen af robotsimulering er det nødvendigt at produkterne, fiksturer og robotcellen findes som 3D CAD geometri. Det betyder f.eks. at man ikke lige kan foretage fikstur ændringer uden at sørge for at CAD modellerne er updateret. Endvidere processerne være beskrevet i såkaldt procedurebeskrivelser f.eks. en svejse eller maleprocedure. I proceduren er beskrevet under hvilke forhold en proces er gældende og med tilhørende tolerancer. Procesprocedurerne er nødvendige for at kunne programmere robotten off-line og genbruge procesparametre. Når virksomheden for dokumenteret processerne betyder det et løft i kvalitet og dokumentation, der ofte gør det meget nemmere at få godtkendt et kvalitetssystem eller blive godkendt som under leverandør. Intelligent programmering Intelligent robot programmering er et programmeringssystem som i princippet først scanner emnet for derefter at generere et robot program. Dette system kan bruges til maleopgaver. Systemet bruges til maling af vilkårlige emner under passagen i et transportsystem hvor emnerne først passerer en sensor-celle, som ved hjælp af lasere, specielle kameraer og software, opmåler emnets 3-dimensionelle form, for herefter at omforme dataerne til robotten og dermed malerpistolens baner. Med intelligent robot programmering kan man programmere en malerobot uden at stoppe produktionslinien, hvilket giver mindre spildtid i produktionen. Man kan robotsimulere robottens bevægelser og estimere cyklustiderne for programmerne. Det vil endvidere være muligt, at verificere om robotten kan gennemfører robot programmerne uden at man behøver at stoppe malelinien. Efter scanning vil et program generere et forslag til et robotprogram, resultatet vil normalt være et robotprogram som er 70-80% færdigt. Derefter kan man fokusere på at lave de sidste tilpasninger inden robotprogrammet sættes i produktion. Med et robotsimulerings program kan man sikre at der ikke er kollision mellem robot og f.eks. fiksturer, kroge osv. Ligeledes kan softwaren aktivt søge at finde robotkonfigurationer hvor robotten kan gennemføre de enkelte bevægelser uden singularitets fejl.


34 Opmåling og scanning af emner Dette kan gøres med laser f.eks. hvis nogle forskellig artede emne skal males, kan en forud gående scanning give robotten nogle informationer om formen, størrelsen og overfladen som gør at male arbejdet bliver udført med stor præcision og besparelse i form af mindre materiale forbrug og minimering af fejlemner. Der vil være mindre omstillingstid da man ikke skal omprogrammere robotten manuelt selv om emnerne er forskellige. Selv- programmering af malerobotter. Scanning af emnet foregår via en 3D scanner umiddelbart inden det skal males. En 3D model bliver genereret ud fra sensormålingerne. Vigtige geometriske overflader bliver genkendt og disse vil blive malet ved anvendelse af passende penselstrøg. Bevægelserne for malerpistolen bliver genereret automatisk. Malerpistolens bevægelser konverteres til robotbevægelser og simuleres. Kollisions frie robotbevægelser genereres automatisk. Et færdigt maleprogram sendes til robotten, som så udfører selve male arbejdet uden at kolliderer med emne eller det fikstur som det er hængt op i. Alt dette uden manuel indgriben.
35 Manuel bevægelse af robot (JOGGING) Robotten kan bevæges manuelt på 2 måder: Kartesisk bevægelse i koordinatsystem: TCP bevæges i positiv eller negativ retning langs med akserne i et koordinatsystem. Aksespecifik bevægelse: Hver enkelt akse kan bevæges alene i positiv og negativ retning
36 Bevægelses typer Der findes 3 programmerbare robotbevægelsestyper. PTP: Maksimal hastighed max. 4.6 m/s Punkt til punkt bevægelsens rute er uforudsigelig. - Robotten bevæger sig på hurtigste måde fra punkt a til b uden garanti for at bevægelsen foregår i en lige linie. Fra bevægelsen starter i pkt. a til den når pkt. b, begynder alle akser at køre samtidig, disse skal synkroniseres og derfor bestemmer den langsomste akse pennens bevægelseshastighed Akslerne stopper samtidlig. LIN: Maksimal hastighed 2.0 m/s - Lineær bevægelse - Robotten bevæger sig i en lige linie fra punkt a til b Liniær bevægelser bliver brugt hvis robotten skal følge en eksakt vej til et punkt med en Bestemt hastighed eller hvis den skal bevæge sig til et punkt som ikke kan nås med PTP Pga. kollisionsfare. OBS: Vær opmærksom på at robotten i bestemte situationer kan have problemer med at udføre en liniær bevægelse. Da robotten ved en LIN bevægelse samtidig bevæger alle led (motorer), vil der være tilfælde hvor bevægelsen ikke kan nå at blive udført med den valgte hastighed. Styresystemet vil i disse tilfælde stoppe robotbevægelsen og melde fejl. Prøv først med en langsommere hastighed. Hvis det ikke løser problemet, kan det være nødvendigt at erstatte LIN bevægelsen, med en PTP bevægelse.
37 CIRC: Maksimal hastighed 2.0 m/s - Cirkulær bevægelse - Robotten bevæger sig i en cirkelhalvbue, som defineres med to punkter pr. Instruktionslinie. - Eksempel 1: P1 er startpunkt, P2 er hjælpepunkt og P3 er målpunkt - Eksempel 2: P3 er startpunkt, P4 er hjælpepunkt og P1 er målpunkt - En fuld cirkel skal dannes af 2 halvcirkler
38 IO interface Ved behov for kommunikation med sensor, andremaskiner eller PLC er skal en robot bruge indog udgange. Derfor er kontrol enheden forsynet med et IO modul.
39 Gennemgang af Tool Center Point (TCP) samt TCP s orientering ( drejningsvinkel i forhold til flangen) Tool 0 (Flange 0) ligger fast i robotsystemet og kan ikke påvirkes. Stifthullet er placeret i håndledets drejeskive, i X ( Minus x ) retning. For at få kontrol over værktøjet ved programmering og programkøring defineres tooldata for de respektive værktøjer. Dette kan gøres ved at angive X, Y, og Z koordinaterne i forholdet til Tool center, eller ved at lade robotsystemet regne disse koordinater ud ved automatisk definition. (4-punkts metoden.)
40 Et præcist defineret TCP letter programmeringen Du kan f. eks. ændre værktøjets vinkel (svejsepistol) på arbejdsstykket uden at spidsen flytter sig. Et præcist defineret TCP orientering giver mulighed for manuel flytning i værktøjets Længderetning f.eks. Hvis man skal ind i trange områder. TCP kan også bruges i forbindelse med forflytninger (ændringer) i TOOLkoordinatsystemet. Definition af værktøj (TOOL) Kontroller at TCP er præcist defineret, det gøres ved at køre i World koordinatsystemet og omorientering. Værktøjets TCP og retning vil være sammenfaldne med robottens monterings flange (drejeskive). Drej med akserne for at teste tool 1 (omorientering om et punkt) Skriv X, Y, og Z værdierne på værktøjets arbejdspunkt ned. Lav en ændring af den automatiske definition ved manuelt at skrive nye værdier på X, Y eller Z.
3 dages kursus Grundlæggende operatørarbejde med industrirobotter Kursus nr. XXXXX
 3 dages kursus Grundlæggende operatørarbejde med industrirobotter Kursus nr. XXXXX Automatik- og robot-afdelingen EUC Sønderborg 2010 Kursist navn : XX Side 2 af 52 Forord Kompendiet: Grundlæggende operatørarbejde
3 dages kursus Grundlæggende operatørarbejde med industrirobotter Kursus nr. XXXXX Automatik- og robot-afdelingen EUC Sønderborg 2010 Kursist navn : XX Side 2 af 52 Forord Kompendiet: Grundlæggende operatørarbejde
At-VEJLEDNING TEKNISKE HJÆLPEMIDLER B.1.4. Automatisk styrede maskinanlæg, inklusive industrirobotanlæg
 At-VEJLEDNING TEKNISKE HJÆLPEMIDLER B.1.4 Automatisk styrede maskinanlæg, inklusive industrirobotanlæg Vejledning om konstruktion og opstilling af automatisk styrede maskinanlæg, inklusive industrirobotanlæg,
At-VEJLEDNING TEKNISKE HJÆLPEMIDLER B.1.4 Automatisk styrede maskinanlæg, inklusive industrirobotanlæg Vejledning om konstruktion og opstilling af automatisk styrede maskinanlæg, inklusive industrirobotanlæg,
Bevægelse af robotten i enkeltakse. Kør robotten til nul grader ved hjælp af enkeltakse. Benyt skærmen til at se positionerne på akserne.
 Bevægelse af robotten i enkeltakse Kør robotten til nul grader ved hjælp af enkeltakse. Benyt skærmen til at se positionerne på akserne. Bevægelse af robotten i verdenskoordinatsystem. Skriv de rigtige
Bevægelse af robotten i enkeltakse Kør robotten til nul grader ved hjælp af enkeltakse. Benyt skærmen til at se positionerne på akserne. Bevægelse af robotten i verdenskoordinatsystem. Skriv de rigtige
Styring af periferiudstyr til termoplastindustrien.
 Styring af periferiudstyr til termoplastindustrien. Plastmager efteruddannelse DjH TNP 12-09-2018 Indhold Introduktion til kurset... 3 Kursets struktur... 4 Robotter i plast industrien... 5 Introduktion...
Styring af periferiudstyr til termoplastindustrien. Plastmager efteruddannelse DjH TNP 12-09-2018 Indhold Introduktion til kurset... 3 Kursets struktur... 4 Robotter i plast industrien... 5 Introduktion...
Industrirobotter og sikkerhed
 Maskinsikkerhed Aps Industrirobotter og sikkerhed 1 Maskinsikkerhed ApS 2 Opgaver Maskinsikkerhed og CE-mærkning - Risikovurdering - Sikker indretning af maskiner - Dokumentation og brugsanvisninger -
Maskinsikkerhed Aps Industrirobotter og sikkerhed 1 Maskinsikkerhed ApS 2 Opgaver Maskinsikkerhed og CE-mærkning - Risikovurdering - Sikker indretning af maskiner - Dokumentation og brugsanvisninger -
Robot nr: Har deltaget: Oplysning om robotcellen: produktion og virkemåde; kort forklaring eller henvisning.
 Robot nr: Kontrol af robotceller Nye / ændringer Dato for gennemgang. Accept af ibrugtagning Initialer Underskrift Ja Nej Projektleder (ansvarlig indkøber) Robotintegrator Modtager (ansvarlig drift) Kompetent
Robot nr: Kontrol af robotceller Nye / ændringer Dato for gennemgang. Accept af ibrugtagning Initialer Underskrift Ja Nej Projektleder (ansvarlig indkøber) Robotintegrator Modtager (ansvarlig drift) Kompetent
Robot, montage/betjening periferiudstyr - operatør Kursus nr. XX
 Robot, montage/betjening periferiudstyr - operatør Kursus nr. XX Automatik og Robot afd. EUC Sønderborg Side 2 af 77 Forord Montering og betjening af robottens periferi-udstyr anvendes som teoribog og
Robot, montage/betjening periferiudstyr - operatør Kursus nr. XX Automatik og Robot afd. EUC Sønderborg Side 2 af 77 Forord Montering og betjening af robottens periferi-udstyr anvendes som teoribog og
Teknologicenter. Forår 2015. Læse/stave problemer? Kontakt os i god tid. Produktion og udvikling euc nordvest
 Teknologicenter Forår 2015 Læse/stave problemer? Kontakt os i god tid Produktion og udvikling euc nordvest Grundlæggende robotkendskab Robotter i industrien for operatører Varighed: 2 dage AMU 42838 Efter
Teknologicenter Forår 2015 Læse/stave problemer? Kontakt os i god tid Produktion og udvikling euc nordvest Grundlæggende robotkendskab Robotter i industrien for operatører Varighed: 2 dage AMU 42838 Efter
EN 1088 + A1 Placering og fastgørelse af aftastere/afbrydere
 Nye standarder Nye standarder Og forlængelse af DS/EN 954-1 EN 1050 EN ISO 14121-1 Risikovurdering EN 775 EN ISO 10218-1 Robotter EN 418 EN ISO 13850 Nødstop EN 294/EN 811 EN ISO 13857 EN 954-1 EN ISO
Nye standarder Nye standarder Og forlængelse af DS/EN 954-1 EN 1050 EN ISO 14121-1 Risikovurdering EN 775 EN ISO 10218-1 Robotter EN 418 EN ISO 13850 Nødstop EN 294/EN 811 EN ISO 13857 EN 954-1 EN ISO
www.robotool.com Food og Pharma Robotbaserede løsninger til Food og Pharma industrien
 www.robotool.com Food og Pharma Robotbaserede løsninger til Food og Pharma industrien ROBOTOOL // velkommen til robotool Velkommen til Robotool RoboTool har siden 1997 beskæftiget sig med udvikling og
www.robotool.com Food og Pharma Robotbaserede løsninger til Food og Pharma industrien ROBOTOOL // velkommen til robotool Velkommen til Robotool RoboTool har siden 1997 beskæftiget sig med udvikling og
Maskiner. Gode råd og værktøjer, som kan anvendes ved brug af tekniske hjælpemidler. Arbejdsmiljø i træ- og møbelindustrien
 Maskiner Gode råd og værktøjer, som kan anvendes ved brug af tekniske hjælpemidler. Arbejdsmiljø i træ- og møbelindustrien Vejledningen er udarbejdet af Træets Arbejdsgivere, Dansk Byggeri, 3F Fagligt
Maskiner Gode råd og værktøjer, som kan anvendes ved brug af tekniske hjælpemidler. Arbejdsmiljø i træ- og møbelindustrien Vejledningen er udarbejdet af Træets Arbejdsgivere, Dansk Byggeri, 3F Fagligt
Vidensdeling og kontinuert uddannelse er nøglebegreber hos FH Automation A/S.
 FH Automation A/S Rådgivning og Automation indenfor: Scada PLC Drives & Motion Robotteknologi El-Tavler Elektromekanisk værksted Hos FH Automation A/S har vi mange års erfaring med automatisering, og vi
FH Automation A/S Rådgivning og Automation indenfor: Scada PLC Drives & Motion Robotteknologi El-Tavler Elektromekanisk værksted Hos FH Automation A/S har vi mange års erfaring med automatisering, og vi
Tjekliste Automatiske maskiner i kvægbruget
 Tjekliste Automatiske maskiner i kvægbruget Denne tjekliste er et praktisk værktøj til landmænd, der planlægger at indkøbe nye maskiner. Tjeklisten er fortrinsvist rettet mod lanmænd inden for kvægbruget,
Tjekliste Automatiske maskiner i kvægbruget Denne tjekliste er et praktisk værktøj til landmænd, der planlægger at indkøbe nye maskiner. Tjeklisten er fortrinsvist rettet mod lanmænd inden for kvægbruget,
Fremmedlegeme - håndtering - introduktion. Niels T. Madsen
 Fremmedlegeme - håndtering - introduktion Niels T. Madsen ntm@dti.dk Fremmedlegemehåndtering - introduktion Detektions udstyr kan finde eventuelle fremmedlegemer i dine produkter, men målingerne kan ikke
Fremmedlegeme - håndtering - introduktion Niels T. Madsen ntm@dti.dk Fremmedlegemehåndtering - introduktion Detektions udstyr kan finde eventuelle fremmedlegemer i dine produkter, men målingerne kan ikke
INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER
 INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER INSTALLATIONS MANUALEN SKAL GENNEMLÆSES OMHYGGELIG FØR IBRUGTAGNING ADVARSEL FOR SIKKER INSTALLATION Inden installation af automatikken skal balance fjederen på
INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER INSTALLATIONS MANUALEN SKAL GENNEMLÆSES OMHYGGELIG FØR IBRUGTAGNING ADVARSEL FOR SIKKER INSTALLATION Inden installation af automatikken skal balance fjederen på
Automatiser jeres produktion let, billigt og fleksibelt
 Automatiser jeres produktion let, billigt og fleksibelt Universal Robots udvikler fleksibel og prisgunstig robotteknologi til industrien. Vi sætter slutbrugeren i centrum og gør teknologien let at bruge
Automatiser jeres produktion let, billigt og fleksibelt Universal Robots udvikler fleksibel og prisgunstig robotteknologi til industrien. Vi sætter slutbrugeren i centrum og gør teknologien let at bruge
CNC Robot Robomachine. LR Mate 200iD
 CNC Robot Robomachine LR Mate 200iD LR Mate 200iD Indhold Introduktion.......................03 Produkt funktioner................... 04 Optioner......................... 05 Specifikationer.....................
CNC Robot Robomachine LR Mate 200iD LR Mate 200iD Indhold Introduktion.......................03 Produkt funktioner................... 04 Optioner......................... 05 Specifikationer.....................
Robotcelle. Flytbar Motoman MH24 Flextek Standard
 Robotcelle Flytbar Motoman MH24 Flextek Standard 1 Systembeskrivelse: Robotcellen er opbygget som en kompakt, flytbar celle, der i løbet ca. 20-30 min kan flyttes fra en maskine til en anden. Cellen kan
Robotcelle Flytbar Motoman MH24 Flextek Standard 1 Systembeskrivelse: Robotcellen er opbygget som en kompakt, flytbar celle, der i løbet ca. 20-30 min kan flyttes fra en maskine til en anden. Cellen kan
AUTOMATISKE MASKINER I GARTNERIBRUGET
 AUTOMATISKE MASKINER I GARTNERIBRUGET E T S I L J T K E 1 Forord Branchearbejdsmiljørådet (BAR) Jord til Bord udgiver en vejledning om automatiske maskiner. Den giver anvisning på, hvordan arbejdsmiljøet
AUTOMATISKE MASKINER I GARTNERIBRUGET E T S I L J T K E 1 Forord Branchearbejdsmiljørådet (BAR) Jord til Bord udgiver en vejledning om automatiske maskiner. Den giver anvisning på, hvordan arbejdsmiljøet
Farm Manager medarbejder: KMZ
 J A S O P E L SF A R MMA NA G E R V A R ENR. : 4 0 2 0 0 0 3 9 D A NS K Titel: Basis bruger vejledning Side 2 of 8 1. Indholdsfortegnelse a. Punkt 2 - Forord b. Punkt 3 - System Introduktion c. Punkt
J A S O P E L SF A R MMA NA G E R V A R ENR. : 4 0 2 0 0 0 3 9 D A NS K Titel: Basis bruger vejledning Side 2 of 8 1. Indholdsfortegnelse a. Punkt 2 - Forord b. Punkt 3 - System Introduktion c. Punkt
Hegn og låger til erhvervsejendomme Svævelåger ribelementhegn
 Hegn og låger til erhvervsejendomme Svævelåger ribelementhegn Svævelågen er den perfekte løsning for industriejendomme, lagerpladser, varehuse og parkeringspladser. På grund af den solide og massive konstruktion
Hegn og låger til erhvervsejendomme Svævelåger ribelementhegn Svævelågen er den perfekte løsning for industriejendomme, lagerpladser, varehuse og parkeringspladser. På grund af den solide og massive konstruktion
Der findes derudover andre typer hvor både klinge og emne fremføres automatisk. Disse typer er ikke omfattet af denne vejledning
 Tekniske Kapsave med hjælpemidler én klinge Indledning En Kapsav er en rundsav, der med hånden eller mekanisk føres på tværs af bordet mod emnet. Den kaldes ofte en afkorter. Der findes flere typer kapsave,
Tekniske Kapsave med hjælpemidler én klinge Indledning En Kapsav er en rundsav, der med hånden eller mekanisk føres på tværs af bordet mod emnet. Den kaldes ofte en afkorter. Der findes flere typer kapsave,
Hvorfor skal man bruge lysbomme og lysgitre?
 Hvorfor skal man bruge lysbomme og lysgitre? Lysbomme og lysgitre er produktionsvenlige sikkerheds-anordninger som ikke er i vejen for operatøren. Samtidigt ved operatøren at han kan stole på at sikkerhedssystemet
Hvorfor skal man bruge lysbomme og lysgitre? Lysbomme og lysgitre er produktionsvenlige sikkerheds-anordninger som ikke er i vejen for operatøren. Samtidigt ved operatøren at han kan stole på at sikkerhedssystemet
WE KNOW HOW. Produktivitet. Service & Montage. Ergonomi & Sikkerhed. Data. Kvalitet
 WE KNOW HOW AVN Teknik implementerer tekniske løsninger, som sikrer ergonomisk korrekt materialehåndtering. Vores løsninger indebærer sikkerhed, planlægning, opfølgning og vedligeholdelse. Produktivitet
WE KNOW HOW AVN Teknik implementerer tekniske løsninger, som sikrer ergonomisk korrekt materialehåndtering. Vores løsninger indebærer sikkerhed, planlægning, opfølgning og vedligeholdelse. Produktivitet
WELDING INTRODUCTION
 WELDING INTRODUCTION 1 DANROBOTICS din partner i robotløsninger Med os ved din side får du en troværdig samarbejdspartner med stor faglig ekspertise og knowhow. Vi har integreret robotter i alle brancher
WELDING INTRODUCTION 1 DANROBOTICS din partner i robotløsninger Med os ved din side får du en troværdig samarbejdspartner med stor faglig ekspertise og knowhow. Vi har integreret robotter i alle brancher
Lysgitter Quick Guide
 Quick Guide Enkelstrålet lysbom GuardShield AAC ed meget lange afstande og ved udendørsapplikationer er denne type enkelstrålet lysbom velegnet. Det er muligt ved hjælp af spejle med 45 graders hældning
Quick Guide Enkelstrålet lysbom GuardShield AAC ed meget lange afstande og ved udendørsapplikationer er denne type enkelstrålet lysbom velegnet. Det er muligt ved hjælp af spejle med 45 graders hældning
www.robotool.com Metal og Industri Robotbaserede løsninger til Metal-, Træ-, og Plastindustrien
 www.robotool.com Metal og Industri Robotbaserede løsninger til Metal-, Træ-, og Plastindustrien ROBOTOOL // velkommen til robotool Velkommen til Robotool RoboTool har siden 1997 beskæftiget sig med udvikling
www.robotool.com Metal og Industri Robotbaserede løsninger til Metal-, Træ-, og Plastindustrien ROBOTOOL // velkommen til robotool Velkommen til Robotool RoboTool har siden 1997 beskæftiget sig med udvikling
Den datadrevne fabrik sådan høster du potentialet ved digitalisering og automation
 Den datadrevne fabrik sådan høster du potentialet ved digitalisering og automation Hvordan kommer du i gang med dit automationsprojekt? Hvad er dine værktøjer, når du skal gennemføre investeringer i produktionen?
Den datadrevne fabrik sådan høster du potentialet ved digitalisering og automation Hvordan kommer du i gang med dit automationsprojekt? Hvad er dine værktøjer, når du skal gennemføre investeringer i produktionen?
we know how 306100108-2000 G R U P P E N
 we know how G R U P P E N 02 AVN Gruppens ejere. Fra venstre Henrik Krabbe, Peter Krabbe og Ole Krabbe G R U P P E N Teknik der skaber resultater AVN Gruppen blev grundlagt i 1933 af Alfred V. Nielsen.
we know how G R U P P E N 02 AVN Gruppens ejere. Fra venstre Henrik Krabbe, Peter Krabbe og Ole Krabbe G R U P P E N Teknik der skaber resultater AVN Gruppen blev grundlagt i 1933 af Alfred V. Nielsen.
Er DIN autoløfter sikker? 29. oktober 2012 kl. 5:00 / Virksomheder
 Udskrift fra www.motormagasinet.dk - Motor-magasinet Er DIN autoløfter sikker? 29. oktober 2012 kl. 5:00 / Virksomheder Arbejdstilsynet fortæller her om de fokuspunkter, som liftbrugeren, -ejeren, - distributøren
Udskrift fra www.motormagasinet.dk - Motor-magasinet Er DIN autoløfter sikker? 29. oktober 2012 kl. 5:00 / Virksomheder Arbejdstilsynet fortæller her om de fokuspunkter, som liftbrugeren, -ejeren, - distributøren
Niels Christian Nielsen. Maskindirektiv og CE 07. nov. 16
 & 1 Sikkerhed & Industrirobotter DI BSC Metal- og maskinindustrien Fagretslige jura med overenskomst, arbejdstid etc. Arbejdsmiljø Uddannelse Interessevaretagelse MMI arbejdsmiljø udvalg Arbejdsmiljø vejledninger
& 1 Sikkerhed & Industrirobotter DI BSC Metal- og maskinindustrien Fagretslige jura med overenskomst, arbejdstid etc. Arbejdsmiljø Uddannelse Interessevaretagelse MMI arbejdsmiljø udvalg Arbejdsmiljø vejledninger
TEKCASE: SMART TEKNOLOGI UNDERVISNINGSMATERIALE TIL KLASSETRIN
 TEKCASE: SMART TEKNOLOGI UNDERVISNINGSMATERIALE TIL 7. 10. KLASSETRIN GLOBAL KONKURRENCE Danske virksomheder konkurrerer på et globalt marked, hvor pris ofte er afgørende for, hvilke produkter forbrugerne
TEKCASE: SMART TEKNOLOGI UNDERVISNINGSMATERIALE TIL 7. 10. KLASSETRIN GLOBAL KONKURRENCE Danske virksomheder konkurrerer på et globalt marked, hvor pris ofte er afgørende for, hvilke produkter forbrugerne
Robotter. Industri. Industriens Branchearbejdsmiljøråd
 Robotter Industri Industriens Branchearbejdsmiljøråd Mange medarbejdere har i de senere år fået en ny kollega i form af en robot. Robotterne er for alvor på vej ind i danske virksomheder, hvor de fjerner
Robotter Industri Industriens Branchearbejdsmiljøråd Mange medarbejdere har i de senere år fået en ny kollega i form af en robot. Robotterne er for alvor på vej ind i danske virksomheder, hvor de fjerner
Produktion i Danmark. Robotter i global kamp
 Produktion i Danmark Robotter i global kamp Titel: Robotter i global kamp Udarbejdet af: Teknologisk Institut Analyse og Erhvervsfremme Gregersensvej 1 2630 Taastrup August 2015 Forfattere: Stig Yding
Produktion i Danmark Robotter i global kamp Titel: Robotter i global kamp Udarbejdet af: Teknologisk Institut Analyse og Erhvervsfremme Gregersensvej 1 2630 Taastrup August 2015 Forfattere: Stig Yding
Mejerisektoren - ost
 Working Class Food Automatiserer arbejdsprocesser til: Mejerisektoren - ost Effektiv og fleksibel: - Håndtering i højhygiejne zoner - Pakning - Mixpakning - Palletering Håndtering i højhygiejne zoner Skånsomt
Working Class Food Automatiserer arbejdsprocesser til: Mejerisektoren - ost Effektiv og fleksibel: - Håndtering i højhygiejne zoner - Pakning - Mixpakning - Palletering Håndtering i højhygiejne zoner Skånsomt
Beskyttelse Døre, fronthjelm, bagagerum og kabine, samt startblokering (hvis monteret)
") Kære Kunde Vi takker for valget af vores system, og vi kan oplyse, at dette produkt er et teknisk avanceret alarmsystem, der lever op til de ydelsesmæssige standarder, som er fastsat af bilproducenterne,
Kære Kunde Vi takker for valget af vores system, og vi kan oplyse, at dette produkt er et teknisk avanceret alarmsystem, der lever op til de ydelsesmæssige standarder, som er fastsat af bilproducenterne,
Teknologicenter Efteruddannelse
 Teknologicenter Efteruddannelse Efterår 2016 Læse/stave problemer? Kontakt os i god tid Kursuscentret euc nordvest Grundlæggende robotkendskab Robotter i industrien for operatører Varighed: 2 dage AMU
Teknologicenter Efteruddannelse Efterår 2016 Læse/stave problemer? Kontakt os i god tid Kursuscentret euc nordvest Grundlæggende robotkendskab Robotter i industrien for operatører Varighed: 2 dage AMU
Mejerisektoren - Mælk
 Working Class Food Metal Automatiserer arbejdsprocesser til: Mejerisektoren - Mælk Effektiv og fleksibel: - Pakning - Bila Milk Packer - Palletering Pakning Effektivt Ensartet Fjerner EGA Pakning af mælk
Working Class Food Metal Automatiserer arbejdsprocesser til: Mejerisektoren - Mælk Effektiv og fleksibel: - Pakning - Bila Milk Packer - Palletering Pakning Effektivt Ensartet Fjerner EGA Pakning af mælk
Sådan skal robotter være Enkle Fleksible Billige
 Sådan skal robotter være Enkle Fleksible Billige TEKNISKE SPECIFIKATIONER: www.universal-robots.dk/dk/produkter 195 DAGE GENNEMSNITLIG TILBAGEBETALINGSTID Robotter endelig indenfor din rækkevidde Med Universal
Sådan skal robotter være Enkle Fleksible Billige TEKNISKE SPECIFIKATIONER: www.universal-robots.dk/dk/produkter 195 DAGE GENNEMSNITLIG TILBAGEBETALINGSTID Robotter endelig indenfor din rækkevidde Med Universal
Toyota Material Handling i Europa
 Toyota Material Handling i Europa Total dækning Toyota Material Handlings netværk strækker sig over 30 lande i Europa med mere end 4500 mobile teknikere. Altid lokalt med global support Uanset hvor du
Toyota Material Handling i Europa Total dækning Toyota Material Handlings netværk strækker sig over 30 lande i Europa med mere end 4500 mobile teknikere. Altid lokalt med global support Uanset hvor du
INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER GA 1000
 INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER GA 1000 INSTALLATIONS MANUALEN SKAL GENNEMLÆSES OMHYGGELIG FØR IBRUGTAGNING ADVARSEL FOR SIKKER INSTALLATION Inden installation af automatikken skal balance fjederen
INSTALLATIONSMANUAL TIL GARAGEPORT ÅBNER GA 1000 INSTALLATIONS MANUALEN SKAL GENNEMLÆSES OMHYGGELIG FØR IBRUGTAGNING ADVARSEL FOR SIKKER INSTALLATION Inden installation af automatikken skal balance fjederen
SVINGBUKKER. SPB Evolution
 SVINGBUKKER SPB Evolution SPB Evolution SPB Evolution og SPB Evolution UD er videreudviklinger af vores gennemprøvede Servo Power Bend-koncept: alsidige industrielle svingbukkemaskiner, der kombinerer
SVINGBUKKER SPB Evolution SPB Evolution SPB Evolution og SPB Evolution UD er videreudviklinger af vores gennemprøvede Servo Power Bend-koncept: alsidige industrielle svingbukkemaskiner, der kombinerer
Brugsanvisning Risikovurdering
 Brugsanvisning Risikovurdering VEDRØRENDE : Mastekran fritstående SAG NR. : 16183 UFØRT AF : Alex Hansen DK Kraner REKVIRENT : ASC Aabenraa Sejl Club 1 12-05-2016 0.0 Indhold 0.0 Indhold...2 1.0 Anlægget...3
Brugsanvisning Risikovurdering VEDRØRENDE : Mastekran fritstående SAG NR. : 16183 UFØRT AF : Alex Hansen DK Kraner REKVIRENT : ASC Aabenraa Sejl Club 1 12-05-2016 0.0 Indhold 0.0 Indhold...2 1.0 Anlægget...3
GH1 Q, GH1 F -1830/08/2012 DK Guldmann
 GH1 Q, GH1 F Lofthejsserien GH1 og GH Q Tid til omsorg Lofthejs til daglig pleje Lofthejssystemet er designet til at dække alle daglige løftebehov i private hjem, plejeboliger og institutioner. Lofthejssystemet
GH1 Q, GH1 F Lofthejsserien GH1 og GH Q Tid til omsorg Lofthejs til daglig pleje Lofthejssystemet er designet til at dække alle daglige løftebehov i private hjem, plejeboliger og institutioner. Lofthejssystemet
Mark like a Professional. Markeringssystem FlyMarker PRO
 Mark like a Professional Markeringssystem FlyMarker PRO Mark like a Professional FlyMarker PRO Version MOBIL Med den håndholdte CNC markeringssystem Fly- Marker PRO, bliver markering af store, tunge og
Mark like a Professional Markeringssystem FlyMarker PRO Mark like a Professional FlyMarker PRO Version MOBIL Med den håndholdte CNC markeringssystem Fly- Marker PRO, bliver markering af store, tunge og
Instruktions- og betjeningsmanual. SIMA for elektrisk betonjernsklipper MODELLER: CEL-30, CEL-30-M, CEL-35, CEL-40 & CEL-45
 Instruktions- og betjeningsmanual SIMA for elektrisk betonjernsklipper MODELLER: CEL-0, CEL-0-M, CEL-5, CEL-40 & CEL-45 Indholdsfortegnelse. Håndtering & transport Side. Montering / samling Side. Opstilling
Instruktions- og betjeningsmanual SIMA for elektrisk betonjernsklipper MODELLER: CEL-0, CEL-0-M, CEL-5, CEL-40 & CEL-45 Indholdsfortegnelse. Håndtering & transport Side. Montering / samling Side. Opstilling
Infoblad. ISO/TS 16949 - Automotive
 Side 1 af 5 ISO/TS 16949 - Automotive Standarden ISO/TS 16949 indeholder særlige krav gældende for bilindustrien og for relevante reservedelsvirksomheder. Standardens struktur er opbygget som strukturen
Side 1 af 5 ISO/TS 16949 - Automotive Standarden ISO/TS 16949 indeholder særlige krav gældende for bilindustrien og for relevante reservedelsvirksomheder. Standardens struktur er opbygget som strukturen
Hans Morten Henriksen. Maskinsikkerhed. Maskindirketivet. Ansvar for en maskines indretning. Ansvar for maskiner i brug. Maskinsikkerhed ApS
 Maskinsikkerhed Maskinsikkerhed og CE-mærkning Rådgivning Inspektion Indkøb Undervisning 1 Hans Morten Henriksen Civ ing produktion 3 år i produktion, indkøb, udvikling mv 2 x 3 år maskinfabrikant, udvikling,
Maskinsikkerhed Maskinsikkerhed og CE-mærkning Rådgivning Inspektion Indkøb Undervisning 1 Hans Morten Henriksen Civ ing produktion 3 år i produktion, indkøb, udvikling mv 2 x 3 år maskinfabrikant, udvikling,
Automationsnavigatør i produktion Hvorfor skal man uddanne sig til automationsnavigatør?
 Automationsnavigatør i produktion Hvorfor skal man uddanne sig til automationsnavigatør? Industriproduktioner er i dag typisk en blanding af mange fagdiscipliner og automatisk produktionsudstyr på flere
Automationsnavigatør i produktion Hvorfor skal man uddanne sig til automationsnavigatør? Industriproduktioner er i dag typisk en blanding af mange fagdiscipliner og automatisk produktionsudstyr på flere
AGROMEK Oplæg af Lars Arly Rasmussen og Flemming Lindegaard Arbejdstilsynets Markedsovervågning
 AGROMEK 2016 Oplæg af Lars Arly Rasmussen og Flemming Lindegaard Arbejdstilsynets Markedsovervågning Formål Hvad er formålet med disse 30 minutter 1. Kort info om udvalgte regler. 2. Automatisk igangsætning
AGROMEK 2016 Oplæg af Lars Arly Rasmussen og Flemming Lindegaard Arbejdstilsynets Markedsovervågning Formål Hvad er formålet med disse 30 minutter 1. Kort info om udvalgte regler. 2. Automatisk igangsætning
Oversigt over AMU-kurser. Betjening og programmering af industrirobotter
 Oversigt over AMU-kurser Betjening og programmering af industrirobotter Forord Industrirobotter bruges i stigende grad som et vigtigt middel til at fastholde og styrke en konkurrencedygtig industri i Danmark.
Oversigt over AMU-kurser Betjening og programmering af industrirobotter Forord Industrirobotter bruges i stigende grad som et vigtigt middel til at fastholde og styrke en konkurrencedygtig industri i Danmark.
Attente visuel. HVAD ER ProPILOT? FORDELE FOR FØRERNE
 NISSAN ProPILOT HVAD ER ProPILOT? ProPILOT er et avanceret førerassistentsystem. Det hjælper føreren under acceleration, opbremsning og med styring under kørsel i en vognbane på motorvej. ProPILOT er en
NISSAN ProPILOT HVAD ER ProPILOT? ProPILOT er et avanceret førerassistentsystem. Det hjælper føreren under acceleration, opbremsning og med styring under kørsel i en vognbane på motorvej. ProPILOT er en
GODE RÅD OM MASKIN- SIKKERHED. Novellefilm og diskussionsoplæg om forebyggelse af mobning på arbejdspladsen
 GODE RÅD OM MASKIN- SIKKERHED Novellefilm og diskussionsoplæg om forebyggelse af mobning på arbejdspladsen Indhold Ansvar for maskinsikkerhed 3 Tag ansvar for maskinsikkerheden Risikovurdering og APV 4
GODE RÅD OM MASKIN- SIKKERHED Novellefilm og diskussionsoplæg om forebyggelse af mobning på arbejdspladsen Indhold Ansvar for maskinsikkerhed 3 Tag ansvar for maskinsikkerheden Risikovurdering og APV 4
Sikkerhed og frihed. Mandskabskurve til HMF-kraner
 Sikkerhed og frihed Mandskabskurve til HMF-kraner Arbejdsfrihed i højden En mandskabskurv også kaldet en MEWP (Mobile Elevating Work Platform) er det ideelle værktøj, når der skal arbejdes i højden. Fordelene
Sikkerhed og frihed Mandskabskurve til HMF-kraner Arbejdsfrihed i højden En mandskabskurv også kaldet en MEWP (Mobile Elevating Work Platform) er det ideelle værktøj, når der skal arbejdes i højden. Fordelene
INDUSTRI 4.0 POTENTIALERNE FOR DANSK INDUSTRIPRODUKTION
 INDUSTRI 4.0 POTENTIALERNE FOR DANSK INDUSTRIPRODUKTION MADE styrker økosystemet omkring dansk produktion MADE skaber og deler viden baseret på industriel forskning MADE tilbyder et åbent netværk af små
INDUSTRI 4.0 POTENTIALERNE FOR DANSK INDUSTRIPRODUKTION MADE styrker økosystemet omkring dansk produktion MADE skaber og deler viden baseret på industriel forskning MADE tilbyder et åbent netværk af små
Økonomi og arbejdsmiljø
 Økonomi og arbejdsmiljø Produktivitet, kvalitet og arbejdsmiljø Jan Toft Rasmussen Dansk Metal Produktivitet, kvalitet og arbejdsmiljø Industriens Branchearbejdsmiljøråd PKA-værktøjets formål Virksomhedens
Økonomi og arbejdsmiljø Produktivitet, kvalitet og arbejdsmiljø Jan Toft Rasmussen Dansk Metal Produktivitet, kvalitet og arbejdsmiljø Industriens Branchearbejdsmiljøråd PKA-værktøjets formål Virksomhedens
Oversigt over produktfamilier. InspectorP64x Konfigurerbar. Programmerbar. Økonomisk. Hurtig. 2D-VISION
 Oversigt over produktfamilier InspectorP64x Konfigurerbar. Programmerbar. Økonomisk. Hurtig. Fordele A ERBAR. PROGRAMMERBAR. ØKOURTIG. B C D E Udvid 2D-vision-sensorne InspectorP6xx s funktioner med SensorApps
Oversigt over produktfamilier InspectorP64x Konfigurerbar. Programmerbar. Økonomisk. Hurtig. Fordele A ERBAR. PROGRAMMERBAR. ØKOURTIG. B C D E Udvid 2D-vision-sensorne InspectorP6xx s funktioner med SensorApps
FR 100 PE KÆDETRANSPORTØR
 Side 1 af 8 INDHOLDSFORTEGNELSE: 1. Overensstemmelseserklæring. 2. Sikkerhed 3. Montage 4. Brugsvejledning 5. Garanti 6. Reservedelstegninger Side 2 af 8 1. Overensstemmelseserklæring FREMA EU-overensstemmelseserklæring
Side 1 af 8 INDHOLDSFORTEGNELSE: 1. Overensstemmelseserklæring. 2. Sikkerhed 3. Montage 4. Brugsvejledning 5. Garanti 6. Reservedelstegninger Side 2 af 8 1. Overensstemmelseserklæring FREMA EU-overensstemmelseserklæring
Brugsanvisning Q1 v1.3 (komprimeret), DK.doc. Brugsanvisning Q1. torbjorn@qfog.se tel:+46-(0)70-2622137
, DK.doc. Brugsanvisning Q1. torbjorn@qfog.se tel:+46-(0)70-2622137") 2009-06-15 1(9) Brugsanvisning Q1 Q-Fog AB bjorn@qfog.se tel:+46-(0)70-2622149 Herrgårdsgatan 13 torbjorn@qfog.se tel:+46-(0)70-2622137 713 31 Nora Office tel:+46-(0)587-25640 SWEDEN org.nr 556699-3464
2009-06-15 1(9) Brugsanvisning Q1 Q-Fog AB bjorn@qfog.se tel:+46-(0)70-2622149 Herrgårdsgatan 13 torbjorn@qfog.se tel:+46-(0)70-2622137 713 31 Nora Office tel:+46-(0)587-25640 SWEDEN org.nr 556699-3464
STYKLISTE AP 500 MANUAL 1 1 ELEKTRONIK MODUL 2 1 SERVOMOTOR 3 1 LEDNINGSNET 5 1 AP 500 MONTERINGS KIT 5.1 1 WIRETRÆK BESLAG
 STYKLISTE # ANTAL BESKRIVELSE 1 1 ELEKTRONIK MODUL 2 1 SERVOMOTOR 3 1 LEDNINGSNET 5 1 AP 500 MONTERINGS KIT 5.1 1 WIRETRÆK BESLAG 5.2 3 WIRE BESKYTTER 5.3 1 KABELHOLDER 5.4 1 SPÆNDESKIVE 5.5 1 WIRETRÆK
STYKLISTE # ANTAL BESKRIVELSE 1 1 ELEKTRONIK MODUL 2 1 SERVOMOTOR 3 1 LEDNINGSNET 5 1 AP 500 MONTERINGS KIT 5.1 1 WIRETRÆK BESLAG 5.2 3 WIRE BESKYTTER 5.3 1 KABELHOLDER 5.4 1 SPÆNDESKIVE 5.5 1 WIRETRÆK
Industriporte ledhejseporte P rulleporte
 Industriporte ledhejseporte rulleporte MakroPro and MakroPro Alu ledhejseporte er en moderne løsning for industri, lagerhuse og værksteder. Solid, driftsikker og varm port Ledhejseporten er produceret
Industriporte ledhejseporte rulleporte MakroPro and MakroPro Alu ledhejseporte er en moderne løsning for industri, lagerhuse og værksteder. Solid, driftsikker og varm port Ledhejseporten er produceret
APPLICATION SHEET Juli
 Indholdsfortegnelse 1. Beskrivelse 2. Anvendelse - Data 3. Valg af produkt og dimensionering 4. Motovario løsning 1. Beskrivelse Skærmene til cricketbaner er en del af det nødvendige udstyr til cricketspillet.
Indholdsfortegnelse 1. Beskrivelse 2. Anvendelse - Data 3. Valg af produkt og dimensionering 4. Motovario løsning 1. Beskrivelse Skærmene til cricketbaner er en del af det nødvendige udstyr til cricketspillet.
AMU, maskin og værktøj CNC-teknik Kursusnummer 45186
 CC-teknik Kursusnummer 45186 Udviklet af EUCSyd, Sønderborg 1 Indholdsfortegnelse Indholdsfortegnelse... 2 Kursusinformation... 3 Historisk tilbageblik... 4 rincippet i en cnc-styring... 5 Tallinien...
CC-teknik Kursusnummer 45186 Udviklet af EUCSyd, Sønderborg 1 Indholdsfortegnelse Indholdsfortegnelse... 2 Kursusinformation... 3 Historisk tilbageblik... 4 rincippet i en cnc-styring... 5 Tallinien...
Bruger- og monteringsvejledning Installation and user manual Installatie- en gebruikershandleiding... 17
 Bruger- og monteringsvejledning... 3 Installation and user manual... 10 Installatie- en gebruikershandleiding... 17 Les instructions et le manuel... 24 www.kronings.com - next generation caravan equipment
Bruger- og monteringsvejledning... 3 Installation and user manual... 10 Installatie- en gebruikershandleiding... 17 Les instructions et le manuel... 24 www.kronings.com - next generation caravan equipment
Focus. Sikkerhedslysgitter og Sikkerhedslysbom. Godkendelser: Anvendelse: Fordele: eller rundt om risikoområder
 Sikkerhedslysgitter og Sikkerhedslysbom Focus Godkendelser: Anvendelse: eller rundt om risikoområder Fordele: En lysbom/lysgitter med alle muligheder funktion, beregnet til at anvendes hvor det er af højeste
Sikkerhedslysgitter og Sikkerhedslysbom Focus Godkendelser: Anvendelse: eller rundt om risikoområder Fordele: En lysbom/lysgitter med alle muligheder funktion, beregnet til at anvendes hvor det er af højeste
Informationsteknologi D Gruppe 16 Opgaver. Gruppe 16. Informationsteknologi D
 Opgaver Gruppe 16 Informationsteknologi D IT Opgaver Her kan du se alle de IT opgaver som vi har lavet i løbet at vores informationsteknologi D periode. Media College Aalborg Side 0 af 7 Indholdsfortegnelse
Opgaver Gruppe 16 Informationsteknologi D IT Opgaver Her kan du se alle de IT opgaver som vi har lavet i løbet at vores informationsteknologi D periode. Media College Aalborg Side 0 af 7 Indholdsfortegnelse
Change management og automatisk backup. Har du styr på din backup?
 Change management og automatisk backup Har du styr på din backup? Håndterer du data manuelt? Håndterer du stadigvæk dine software programmer og data manuelt? (PLC, SCADA, robotter, CNC...) I så fald kender
Change management og automatisk backup Har du styr på din backup? Håndterer du data manuelt? Håndterer du stadigvæk dine software programmer og data manuelt? (PLC, SCADA, robotter, CNC...) I så fald kender
Få det maksimale ud af uniflow
 Få det maksimale ud af uniflow Indgå et partnerskab med os Professionelle services Hardware Software Vi sætter os 100 % ind i jeres virksomheds krav og behov Vi leverer komplette løsninger, der opfylder
Få det maksimale ud af uniflow Indgå et partnerskab med os Professionelle services Hardware Software Vi sætter os 100 % ind i jeres virksomheds krav og behov Vi leverer komplette løsninger, der opfylder
AUTOMATISERET LOGISTIK. KEN AL10 Automatisk transportrobot til instrumentvogne i sterilcentraler
 AUTOMATISERET LOGISTIK KEN AL10 Automatisk transportrobot til instrumentvogne i sterilcentraler AL10 AL10 Øget produktivitet Medarbejderne kan koncentrere sig om mere værdifulde opgaver Manøvrerer sikkert
AUTOMATISERET LOGISTIK KEN AL10 Automatisk transportrobot til instrumentvogne i sterilcentraler AL10 AL10 Øget produktivitet Medarbejderne kan koncentrere sig om mere værdifulde opgaver Manøvrerer sikkert
INSTRUKTION. Bernard el-aktuator
 INSTRUKTION IN113, Nr. B104DKE Bernard el-aktuator Type SQ100, SQ250 SQ400, SQ600, SQ1000 Indhold Opstart... 2 Normal lukkeretning... 3 Komplet leverance... 3 1. Indstilling af mekaniske anslag, 90 -drejende...
INSTRUKTION IN113, Nr. B104DKE Bernard el-aktuator Type SQ100, SQ250 SQ400, SQ600, SQ1000 Indhold Opstart... 2 Normal lukkeretning... 3 Komplet leverance... 3 1. Indstilling af mekaniske anslag, 90 -drejende...
Kampagnepriser OMGÅENDE LEVERING! OMGÅENDE LEVERING! 3 Young Tech bearbejdningscenter type YMC 1568. Baykal bearbejdningscenter type BF 70150
 Kampagnepriser 3 Young Tech bearbejdningscenter type YMC 1568 Bearbejdningscenter med utrolig høj præcision, udført i solid meehanite støbejern. Glideføringer på 3 akser alle med kraftige boxvanger. Håndskrabede
Kampagnepriser 3 Young Tech bearbejdningscenter type YMC 1568 Bearbejdningscenter med utrolig høj præcision, udført i solid meehanite støbejern. Glideføringer på 3 akser alle med kraftige boxvanger. Håndskrabede
2-søjlede autolifte C-2.30 C-2.30A C-2.7 C-3.2 C-3.5 C-5
 2-søjlede autolifte C-2.30 C-2.30A C-2.7 C-3.2 C-3.5 C-5 Alle rettigheder til denne manual forbeholdes. Hel eller delvis kopiering, uden tilladelse, er ikke tilladt..generelt. 1. Dette afsnit er gældende
2-søjlede autolifte C-2.30 C-2.30A C-2.7 C-3.2 C-3.5 C-5 Alle rettigheder til denne manual forbeholdes. Hel eller delvis kopiering, uden tilladelse, er ikke tilladt..generelt. 1. Dette afsnit er gældende
Service til Industrien
 Service til Industrien - Aftaler der sikrer din forretning Fasthold maksimal effektivitet gennem dine anlægs levetid En investering i selv det bedste anlæg er ingen garanti for høj oppetid og effektivitet
Service til Industrien - Aftaler der sikrer din forretning Fasthold maksimal effektivitet gennem dine anlægs levetid En investering i selv det bedste anlæg er ingen garanti for høj oppetid og effektivitet
DAu Industri 4.0 og robotter Personsikkerhed
 Maskinsikkerhed Aps DAu Industri 4.0 og robotter Personsikkerhed Skanderborg 5. september 2017 1 Maskinsikkerhed ApS CE-mærking - Dokumentation, incl risikovurdering - Sikker projektering og sikre løsninger
Maskinsikkerhed Aps DAu Industri 4.0 og robotter Personsikkerhed Skanderborg 5. september 2017 1 Maskinsikkerhed ApS CE-mærking - Dokumentation, incl risikovurdering - Sikker projektering og sikre løsninger
Arbejdstagere og arbejdsgivere hilser robotter velkommen
 Dansk Metal og DI oktober 215 Arbejdstagere og arbejdsgivere hilser robotter velkommen Robotter vinder frem over hele verden, og derfor er det afgørende, at flere danske virksomheder udnytter det store
Dansk Metal og DI oktober 215 Arbejdstagere og arbejdsgivere hilser robotter velkommen Robotter vinder frem over hele verden, og derfor er det afgørende, at flere danske virksomheder udnytter det store
GYRO. Den perfekte løsning til finish-slibning, mellemslibning og afgratning. Til træ, metal og kunststof. Oscillerende slibeteknik
 R GYRO Den perfekte løsning til finish-slibning, mellemslibning og afgratning Oscillerende slibeteknik Til træ, metal og kunststof - et stærkt og effektivt maskinkoncept..! Et karakteristisk kendetegn
R GYRO Den perfekte løsning til finish-slibning, mellemslibning og afgratning Oscillerende slibeteknik Til træ, metal og kunststof - et stærkt og effektivt maskinkoncept..! Et karakteristisk kendetegn
Fremstilling af værktøjskomponenter Drejning. AMU nr
 Fremstilling af værktøjskomponenter Drejning AMU nr. 47597 INDHOLDSFORTEGNELSE Forord 3 Koordinatsystemet på en CNC drejebænk 4 Oversigt over de mest brugte G koder og M koder 7 Værktøjs geometri og opmåling
Fremstilling af værktøjskomponenter Drejning AMU nr. 47597 INDHOLDSFORTEGNELSE Forord 3 Koordinatsystemet på en CNC drejebænk 4 Oversigt over de mest brugte G koder og M koder 7 Værktøjs geometri og opmåling
EN HELT NY STANDARD CXT NEO KRANEN
 INDUSTRIKRANER KRANER TIL KERNEKRAFTINDUSTRIEN HAVNEKRANER LØFTETRUCKS TIL TUNGT ARBEJDE SERVICE VÆRKTØJSMASKINSERVICE EN HELT NY STANDARD CXT NEO KRANEN 2 Konecranes CXT Neo CXT NEO Fleksibilitet Styrke
INDUSTRIKRANER KRANER TIL KERNEKRAFTINDUSTRIEN HAVNEKRANER LØFTETRUCKS TIL TUNGT ARBEJDE SERVICE VÆRKTØJSMASKINSERVICE EN HELT NY STANDARD CXT NEO KRANEN 2 Konecranes CXT Neo CXT NEO Fleksibilitet Styrke
Dambrug. Anlægning af land baserede - Kar og rør installationer. Henvendelse. BS Teknik Design Aps. Tlf +4525263280. Mail tanke@bsteknik.
 0 Anlægning af land baserede - Dambrug Kar og rør installationer. Henvendelse BS Teknik Design Aps. Tlf +4525263280 Mail tanke@bsteknik.com Web. www.bsteknik.com Stålkar med PE Inder liner. Størrelse tilpasset
0 Anlægning af land baserede - Dambrug Kar og rør installationer. Henvendelse BS Teknik Design Aps. Tlf +4525263280 Mail tanke@bsteknik.com Web. www.bsteknik.com Stålkar med PE Inder liner. Størrelse tilpasset
OKM A/S. OKM A/S SMART produktion
 OKM A/S OKM A/S SMART produktion OKM A/S I DAG. KORT PRÆSENTATION AF VIRKSOMHEDEN OKM A/S OKM A/S er en Maskinfabrik / Serie producerende virksomhed med ca. 26 ansatte. OKM A/S er grundlagt i 1973 af Robert
OKM A/S OKM A/S SMART produktion OKM A/S I DAG. KORT PRÆSENTATION AF VIRKSOMHEDEN OKM A/S OKM A/S er en Maskinfabrik / Serie producerende virksomhed med ca. 26 ansatte. OKM A/S er grundlagt i 1973 af Robert
MobiCrane og MobiArm
 MobiCrane og MobiArm MobiCrane og MobiArm vores leddelte udliggerkraner giver mange muligheder Fordele MobiCrane og MobiArm en stor forbedring af dit arbejdsmiljø. Løft bliver meget nemmere, og samtidig
MobiCrane og MobiArm MobiCrane og MobiArm vores leddelte udliggerkraner giver mange muligheder Fordele MobiCrane og MobiArm en stor forbedring af dit arbejdsmiljø. Løft bliver meget nemmere, og samtidig
Field Experiments with a Mobile Robotic Field Server for Smart Agriculture
 Field Experiments with a Mobile Robotic Field Server for Smart Agriculture Af: Tokihiro Fukatsu m.fl. fra National Agriculture and Food Research Organization i Japan, Tokyo Institute of Technology og Shinshu
Field Experiments with a Mobile Robotic Field Server for Smart Agriculture Af: Tokihiro Fukatsu m.fl. fra National Agriculture and Food Research Organization i Japan, Tokyo Institute of Technology og Shinshu
Robotter forfølger en veldefineret bane. Robotteknologi automation til limning/sealing
 Robotter forfølger en veldefineret bane Robotteknologi automation til limning/sealing Kort præsentation af Dansk RobotTeknik Dansk RobotTeknik ApS etableret i 2009 Adresse Måløv Værkstedsby 90, 2760 Måløv
Robotter forfølger en veldefineret bane Robotteknologi automation til limning/sealing Kort præsentation af Dansk RobotTeknik Dansk RobotTeknik ApS etableret i 2009 Adresse Måløv Værkstedsby 90, 2760 Måløv
Dobbelt sender detektor med 4 kanals frekvenser. 1. Funktioner. 2. Produkt gennemgang
 Dobbelt sender detektor med 4 kanals frekvenser Tak, fordi du har købt denne stråle detektor, læs venligst denne brugsanvisning omhyggeligt før installation. Forsøg aldrig at adskille eller reparere produktet.
Dobbelt sender detektor med 4 kanals frekvenser Tak, fordi du har købt denne stråle detektor, læs venligst denne brugsanvisning omhyggeligt før installation. Forsøg aldrig at adskille eller reparere produktet.
Brugsanvisningen skal være let tilgængelig for brugeren
 Tekniske Bordfræsemaskiner hjælpemidler Indledning Anvendelse af tekniske hjælpemidler, herunder bordfræsemaskiner skal ske i henhold til Arbejdstilsynets bestemmelser, samt fabrikantens anvisninger. Kravene
Tekniske Bordfræsemaskiner hjælpemidler Indledning Anvendelse af tekniske hjælpemidler, herunder bordfræsemaskiner skal ske i henhold til Arbejdstilsynets bestemmelser, samt fabrikantens anvisninger. Kravene
NSF Teknik. - interaktiv tavle Mindboard. Mindboard - bliv interaktiv
 - interaktiv tavle Mindboard Ideel løsning hvis projektor allerede er tilstede Mindboard kan leveres i flere forskellige interaktive udgaver: Interaktiv tavle - fast eller til skinne Interaktiv tavle -
- interaktiv tavle Mindboard Ideel løsning hvis projektor allerede er tilstede Mindboard kan leveres i flere forskellige interaktive udgaver: Interaktiv tavle - fast eller til skinne Interaktiv tavle -
OMKnet trådløs. Overblik. Gode ting ved trådløs. Dårlige ting ved trådløs 3/12/2012
 OMKnet trådløs Dette dokument er udarbejdet ud fra egen viden, informationssøgning og testning på kollegiet. En længere og større testning og undersøgelse vil være nødvendig før en præcis pris og endelig
OMKnet trådløs Dette dokument er udarbejdet ud fra egen viden, informationssøgning og testning på kollegiet. En længere og større testning og undersøgelse vil være nødvendig før en præcis pris og endelig
Har I fingrene i maskinen eller styr på sikkerheden?
 3. Opstilling og installation af maskine Har I fingrene i maskinen eller styr på sikkerheden? Ulykker på arbejdet er ærgerlige og kan også være alvorlige. Gennemgå jeres maskiner og løs de problemer, I
3. Opstilling og installation af maskine Har I fingrene i maskinen eller styr på sikkerheden? Ulykker på arbejdet er ærgerlige og kan også være alvorlige. Gennemgå jeres maskiner og løs de problemer, I
MEN-001-B GARAGEPORTÅBNER MONTERINGSVEJLEDNING
 MEN-001-B GARAGEPORTÅBNER MONTERINGSVEJLEDNING INDHOLDSFORTEGNELSE Sikkerhedsforanstaltninger.....1 Nødvendigt værktøj...1 Montering af garageportåbneren...2-6 Montering af skinnerne..7-8 Stramning af
MEN-001-B GARAGEPORTÅBNER MONTERINGSVEJLEDNING INDHOLDSFORTEGNELSE Sikkerhedsforanstaltninger.....1 Nødvendigt værktøj...1 Montering af garageportåbneren...2-6 Montering af skinnerne..7-8 Stramning af
Dobbeltsøjle gearings båndsav type Horisontal
 Dobbeltsøjle gearings båndsav type Type er en dobbeltsøjle båndsav, med komplet hydraulisk styring. Konstruktionen med dobbeltsøjle og liniære føringer, sikrer maksimal præcision og hastighed. Mulighed
Dobbeltsøjle gearings båndsav type Type er en dobbeltsøjle båndsav, med komplet hydraulisk styring. Konstruktionen med dobbeltsøjle og liniære føringer, sikrer maksimal præcision og hastighed. Mulighed
Andengradsligninger. Frank Nasser. 12. april 2011
 Andengradsligninger Frank Nasser 12. april 2011 c 2008-2011. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Bemærk: Dette
Andengradsligninger Frank Nasser 12. april 2011 c 2008-2011. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Bemærk: Dette
S26 MOTOR Original brugermanual
 S26 MOTOR Original brugermanual Indhold 1. Indledning 1 2. Liste over nødvendigt værktøj 1 3. Sikkerhedspåbud 1 4. Motor montering 2 4.1. Instruktion før montering 2 4.2. Samling af skinne 3 4.3. Opsætning
S26 MOTOR Original brugermanual Indhold 1. Indledning 1 2. Liste over nødvendigt værktøj 1 3. Sikkerhedspåbud 1 4. Motor montering 2 4.1. Instruktion før montering 2 4.2. Samling af skinne 3 4.3. Opsætning
Intelligent bolig uden besvær
 Energistyring Større komfort Større sikkerhed Helt enkelt Intelligent bolig uden besvær Få en mere komfortabel og sikker bolig med et lavere elforbrug zensehome er fremtidens bygningsinstallation i diskret
Energistyring Større komfort Større sikkerhed Helt enkelt Intelligent bolig uden besvær Få en mere komfortabel og sikker bolig med et lavere elforbrug zensehome er fremtidens bygningsinstallation i diskret
Fuld skrue. Optimering af produktionen ved HMF v. Lars Vig Jensen VP Sourcing & Supply
 Fuld skrue Optimering af produktionen ved HMF v. Lars Vig Jensen VP Sourcing & Supply 1 2 Højbjerg Maskinfabrik: Højbjerg Maskinfabrik blev grundlagt i 1945 Familieejet selskab stiftet af Arne Bundgaard
Fuld skrue Optimering af produktionen ved HMF v. Lars Vig Jensen VP Sourcing & Supply 1 2 Højbjerg Maskinfabrik: Højbjerg Maskinfabrik blev grundlagt i 1945 Familieejet selskab stiftet af Arne Bundgaard
NBE SOLVARME INDHOLD: 2 Valg af størrelse. 3 Information. 4 Installations tips. 5 Anlægs typer / el tilslutning. 11-13 Styringen. 14 Garanti.
 SOLVARME INDHOLD: 2 Valg af størrelse. 3 Information. 4 Installations tips. 5 Anlægs typer / el tilslutning 11-13 Styringen. 14 Garanti. SOLVARME Solfanger størrelse og tank valg. Som tommel-finger regel
SOLVARME INDHOLD: 2 Valg af størrelse. 3 Information. 4 Installations tips. 5 Anlægs typer / el tilslutning 11-13 Styringen. 14 Garanti. SOLVARME Solfanger størrelse og tank valg. Som tommel-finger regel
MACHFLOW M09A MONTAGE & BRUGSANVISNING
 MACHFLOW M09A MONTAGE & BRUGSANVISNING Dette produkt skal installeres af en Autoriseret fagmand! Opbevar denne instruktion tilgængeligt på installationsstedet. VENTICO NORDIC A/S Holmegaardsvej 64A 4684
MACHFLOW M09A MONTAGE & BRUGSANVISNING Dette produkt skal installeres af en Autoriseret fagmand! Opbevar denne instruktion tilgængeligt på installationsstedet. VENTICO NORDIC A/S Holmegaardsvej 64A 4684
Manual for Jasopels Flåtårn 3210-187005. Manual Jasopels Flåtårn
 Manual for Jasopels Flåtårn 3210-187005 Manual Jasopels Flåtårn Tlf. 98420566 Flåtårn Da_Manual 1. Indholdsfortegnelse 1. Indholdsfortegnelse... 2 2. Forord... 3 3. Symbol forklaring... 3 3.1 Symboler
Manual for Jasopels Flåtårn 3210-187005 Manual Jasopels Flåtårn Tlf. 98420566 Flåtårn Da_Manual 1. Indholdsfortegnelse 1. Indholdsfortegnelse... 2 2. Forord... 3 3. Symbol forklaring... 3 3.1 Symboler
Mobilsikring Flytbart og genanvendeligt sikringskoncept med hurtig installation
 Mobilsikring Flytbart og genanvendeligt sikringskoncept med hurtig installation SIKRING MOBI SIKRING.C Mobilporten Kan leveres komplet med: 40 fods container med skydeport. Fåes også i 0 fods. Mobilhegn
Mobilsikring Flytbart og genanvendeligt sikringskoncept med hurtig installation SIKRING MOBI SIKRING.C Mobilporten Kan leveres komplet med: 40 fods container med skydeport. Fåes også i 0 fods. Mobilhegn
DiSEqC-Positioner. Best. nr. HN4892 (Brugsanvisnings nr. 361)
") DiSEqC-Positioner Best. nr. HN4892 (Brugsanvisnings nr. 361) DiSEqC 1.0/1.2 Positioner DiSEqC-omformer, som gør at man kan styre en parabolmotor 36-Volts type med alle digital modtagere som har standard
DiSEqC-Positioner Best. nr. HN4892 (Brugsanvisnings nr. 361) DiSEqC 1.0/1.2 Positioner DiSEqC-omformer, som gør at man kan styre en parabolmotor 36-Volts type med alle digital modtagere som har standard
Medarbejder udvikling og øget effektivitet i. Kundeservice- og Support centret
 Medarbejder udvikling og øget effektivitet i Kundeservice- og Support centret God kundeservice er god forretning! Undersøgelse viser en direkte sammenhæng mellem oplevelsen af jeres kundeservice, og jeres
Medarbejder udvikling og øget effektivitet i Kundeservice- og Support centret God kundeservice er god forretning! Undersøgelse viser en direkte sammenhæng mellem oplevelsen af jeres kundeservice, og jeres