Analogregnemaskinen. Datahistorisk Forening 30/8 2007
|
|
|
- Grethe Hedegaard
- 8 år siden
- Visninger:
Transkript
1 Analogregnemaskinen Datahistorisk Forening 30/8 2007
2 Analogregnemaskiner bygger på ÆKVIVALENSRELATION: Ækvivalensen mellem en fysisk størrelse og en skalaaflæsning Eksempel: Fysisk længder ~ talværdier Regnestokken blev opfundet omkring

3 Løsning af dynamiske problemer med ækvivalensprincippet Effekten ændres i et spring Spændingen V ændres i et spring

4 Differential analysator. Princippet opfundet i 1876 af James Thompson (broder til Lord Kelvin) Meccano-udgave fra 1934
 Meccano-udgave")
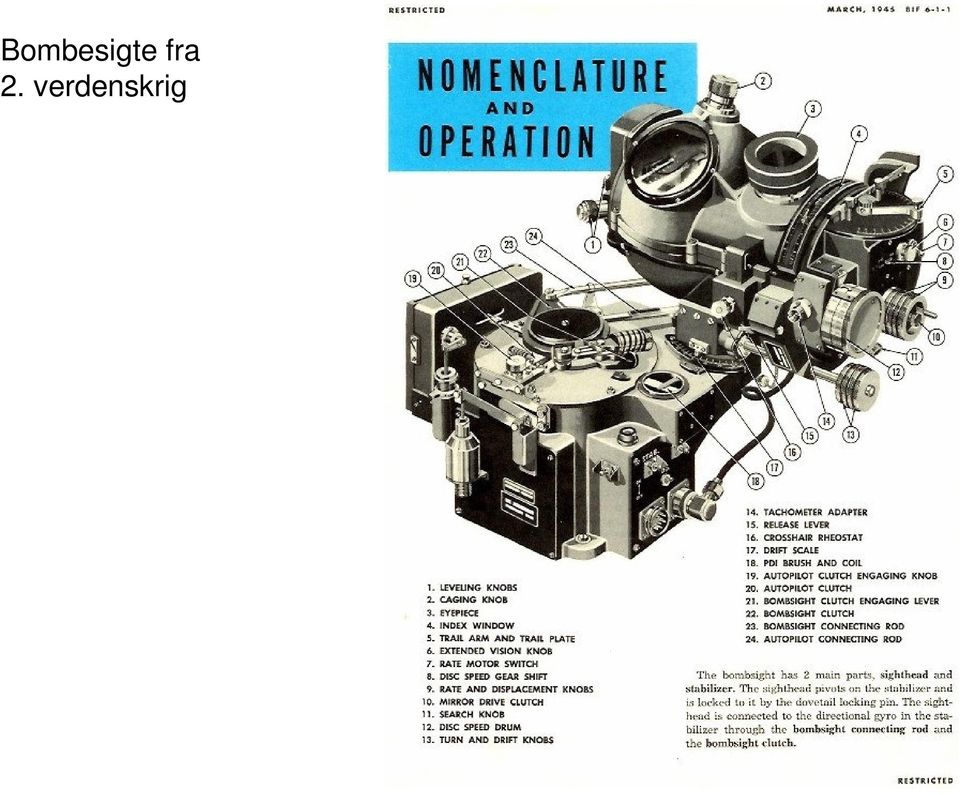
5 Bombesigte fra 2. verdenskrig
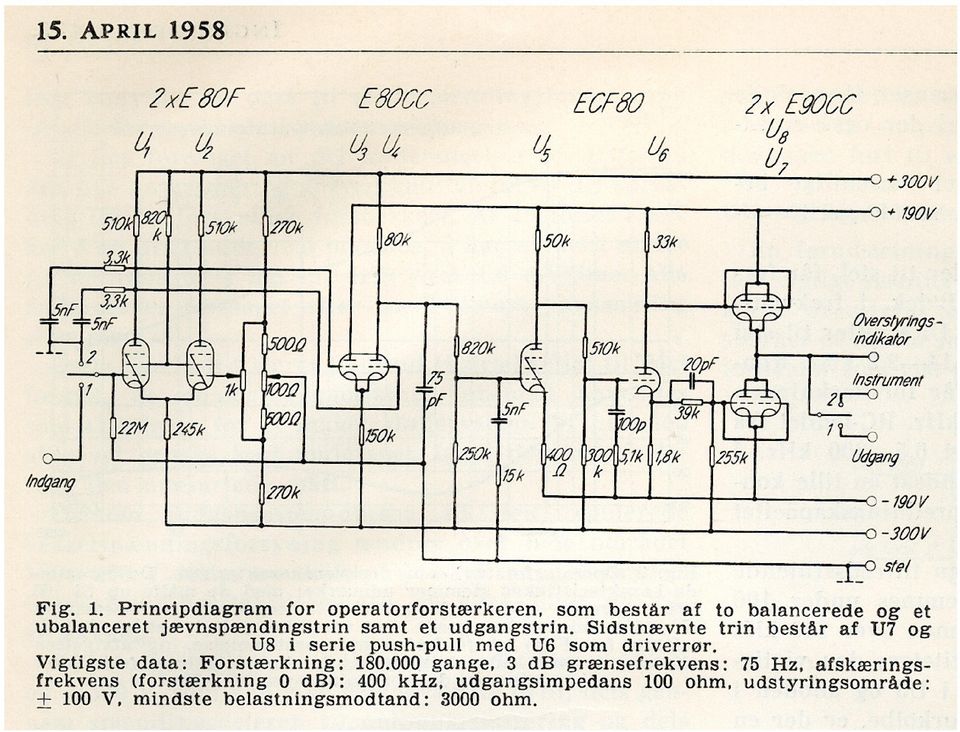
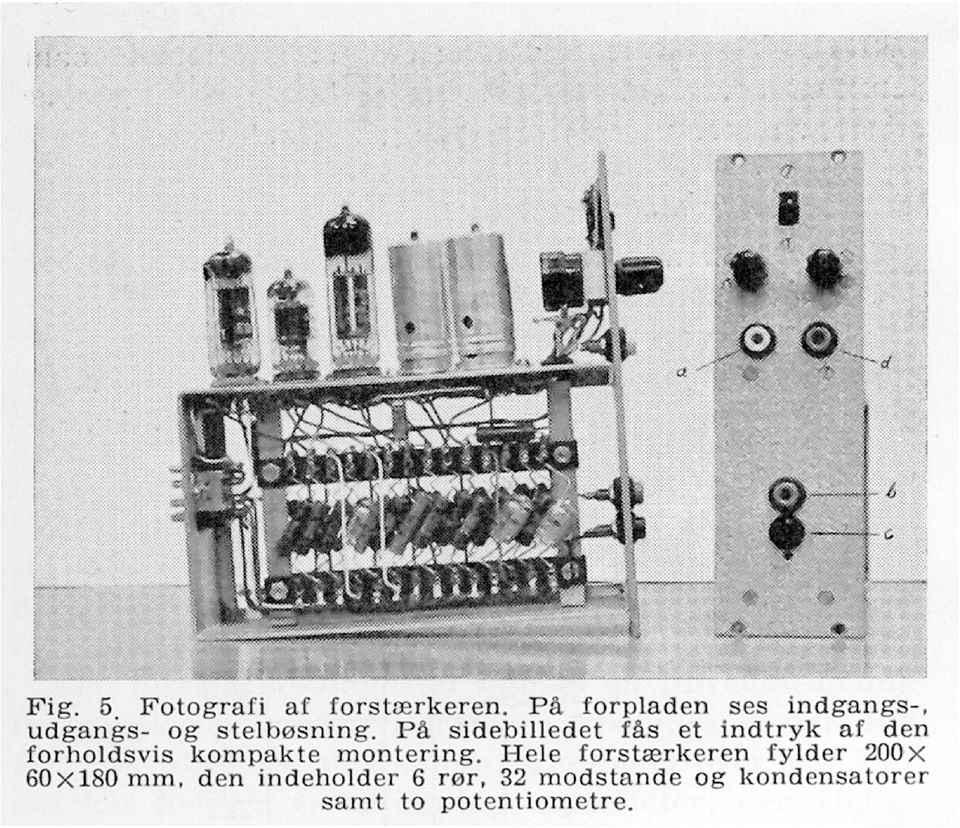
6 Elektronisk analogregnemaskine Første udgave på DTU (DTH) Udviklet ved Servolaboratoriet I
 Udviklet ved")
7
8
9 Operationsforstærkerens karakteristika: Vi Vni _ + V+ (+forsyningsspænding) Vout V- (-forsyningsspænding) - Differensforstærker Indgangssignaler Vni og Vi Udgangssignal Vout = A * ( Vni Vi )

10 Operationsforstærkerens karakteristika: Vi Vni _ + V+ (+forsyningsspænding) Vout V- (-forsyningsspænding) - Differensforstærker Indgangssignaler Vni og Vi Udgangssignal Vout = A * ( Vni Vi ) - Udstyringsområde (typisk) Rørforstærkere: +/- 100V Halvlederstærkere: +/- 10V
 - Udstyringsområde (typisk) Rørforstærkere: +/- 100V")
11 Operationsforstærkerens karakteristika: Vi Vni _ + V+ (+forsyningsspænding) Vout V- (-forsyningsspænding) - Differensforstærker Indgangssignaler Vni og Vi Udgangssignal Vout = A * ( Vni Vi ) - Udstyringsområde (typisk) Rørforstærkere: +/- 100V Halvlederstærkere: +/- 10V - Forstærkning f = 0 Hz (DC) A > 100dB ( > x ) f > 100 khz A < 0 db ( < 1 x )
 A > 100dB ( > 100.")
12 Operationsforstærkerens karakteristika: Vi Vni _ + V+ (+forsyningsspænding) Vout V- (-forsyningsspænding) - Differensforstærker Indgangssignaler Vni og Vi Udgangssignal Vout = A * ( Vni Vi ) - Udstyringsområde (typisk) Rørforstærkere: +/- 100V Halvlederstærkere: +/- 10V - Forstærkning f = 0 Hz (DC) A > 100dB ( > x ) f > 100 khz A < 0 db ( < 1 x ) - DC-drift (korttids) Rørforstærkere < 3 mv/time Halvledere < 1 uv
 f > 100 khz A < 0 db ( < 1 x ) - DC-drift (korttids) Rørforstærkere < 3 mv/time Halvledere <")
13 Operationsforstærkerens karakteristika: Vi Vni _ + V+ (+forsyningsspænding) Vout V- (-forsyningsspænding) - Differensforstærker Indgangssignaler Vni og Vi Udgangssignal Vout = A * ( Vni Vi ) - Udstyringsområde (typisk) Rørforstærkere: +/- 100V Halvlederstærkere: +/- 10V - Forstærkning f = 0 Hz (DC) A > 100dB ( > x ) f > 100 khz A < 0 db ( < 1 x ) - Dc-drift (korttids) Rørforstærkere < 3 mv / time Halvledere < 1 uv / Kelvin - Indgangsimpedanser: >> 100 megohm
 f > 100 khz A < 0 db ( < 1 x ) - Dc-drift (korttids) Rørforstærkere < 3 mv / time Halvledere < 1 uv / Kelvin")
14 Operationsforstærkerens karakteristika: Vi Vni _ + V+ (+forsyningsspænding) Vout V- (-forsyningsspænding) - Differensforstærker Indgangssignaler Vni og Vi Udgangssignal Vout = A * ( Vni Vi ) - Udstyringsområde (typisk) Rørforstærkere: +/- 100V Halvlederstærkere: +/- 10V - Forstærkning f = 0 Hz (DC) A > 100dB ( > x ) f > 100 khz A < 0 db ( < 1 x ) - Dc-drift (korttids) Rørforstærkere < 3 mv/time Halvledere < 1 uv/ grad C - Indgangsimpedanser: >> 100 megohm - Udgangsimpedans: << 100 ohm
 f > 100 khz A < 0 db ( < 1 x ) - Dc-drift (korttids) Rørforstærkere < 3 mv/time Halvledere < 1 uv/ grad C -")
15 Passive komponenter Indgangsnetværk Feedbacknetværk Vin Spændingskilde Høj-impedanset voltmeter _ 0 +. Spændingskilde Vout

16 Anvendelse af operationsforstærkere i analogregnemaskiner Simpel forstærkning Rf V+ V+ V1 Vin R V+ V- OUT 1 Vout V V- V-

17 Anvendelse af operationsforstærkere i analogregnemaskiner Simpel forstærkning Rf V+ V+ V1 Vin R V+ V- OUT 1 Vout V V- V- Vout = - Vin * ( Rf / R1)

18 Fortegnsvending uden forstærkning Rf V+ V+ V1 Vin R V+ V- OUT 1 Vout V V- V- R1 = Rf Vout = -Vin

19 Kontinuert variabel forstærkning Rf Vin V+ V+ V1 Potentiometer Deleforhold k 0 < k < 1 k * Vin R V+ V- OUT 1 Vout V V- V- Vout = Vin Rf k R1

20 Vægtet summation Rf Vin1 R1 V+ V+ V1 Vin2 Vin2 R2 R V+ V- OUT 1 Vout V V- V- Vout = Vin1 Rf R1 + Vin2 Rf + Vin3 Rf R2 R3

21 Integrator C V+ V+ V1 Vin R V+ V- OUT 1 Vout V V- V-
22 Integrator C V+ V+ V1 Vin R V+ V- OUT 1 Vout V V- V- Vout = 1 R C t 0 Vin dt
23 DIAGRAM SYMBOLER Blokdiagram Koblingsskema Vægtet addition Forstærker nummer x y X + 2y + 10z x y z # - (X + 2y + 10z) z 10 + Integration 2 x 2 s t x t d 0 x 2 # 2 t 0 x dt Multiplikation med konstant < 1 Potentiometer nummer x 0,57 0,57 x x # 0,57 x 0,57
24 Eksempel: Svingende masse (x og y betegner positionsændringer ud fra den stationære tilstand) x Lodret styret ophæng k Fjeder y m Masse c Dæmper
25 Eksempel: Svingende masse (x og y betegner positionsændringer ud fra den stationære tilstand) x Lodret styret ophæng k Fjeder Kraftændringer virkende på massen, regnet positiv opad : Fjeder: K f = k (x y) y m Masse. Dæmper: K d = - c * dy / dt = - c * y.. Masse: K m = - m * d 2 y / dt 2 = - m * y c Dæmper
26 Eksempel: Svingende masse (x og y betegner positionsændringer ud fra den stationære tilstand) x Lodret styret ophæng k Fjeder Kraftændringer virkende på massen, regnet positiv opad : Fjeder: K f = k (x y) y m Masse. Dæmper: K d = - c * dy / dt = - c * y.. Masse: K m = - m * d 2 y / dt 2 = - m * y Kræfternes sum = 0, dvs. c Dæmper... k (x y) - c y - m y = 0 Ordnet:.. k c. y = * ( x - y - y ) m k
27 Eksempel: Svingende masse (x og y betegner positionsændringer ud fra den stationære tilstand) x Lodret styret ophæng k Fjeder Kraftændringer virkende på massen, regnet positiv opad : Fjeder: K f = k (x y) y m Masse. Dæmper: K d = - c * dy / dt = - c * y.. Masse: K m = - m * d 2 y / dt 2 = - m * y Kræfternes sum = 0, dvs. c Dæmper... k (x y) - c y - m y = 0 Ordnet:.. k c. y = * ( x - y - y ) m k
28 . y = t 0 t... y dt y = y dt 0 Blokdiagram.. y ẏ y Koblingsskema... - y 1 y 1 - y
29 Differentialligning.. k c. y = * ( x - y - y ) m k For m = 10 kg, c = 2 N sek / m, k = 10 N / m fås... y = x - y - 0,2 y Koblingsskema x 1 - y y 1 y 1 - y 1-0,2 y. -ẏ 1 0,2 y Signalgenerator Oscilloskop
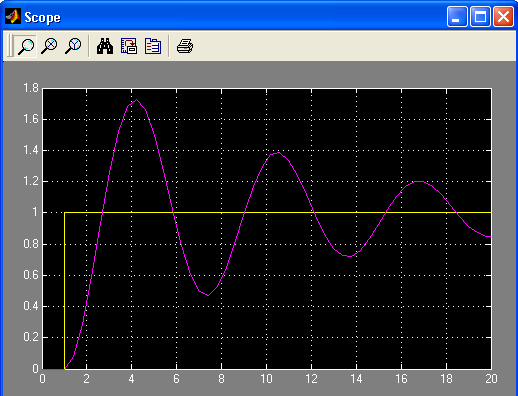
30 Simulering af den svingende masse med Mathlab Simulink Blokkene -1/s simulerer analogregnemaskinens integratorer x(t) Step y(t) Scope -1 Gain -1 s Transfer Fcn -1 s Transfer Fcn1-1 Gain2-0.2 Gain1
31
32 Anvendelse af Laplace-operatoren s Tidsdomænet Laplace-domænet x( t) X( s) d dt x( t) x dt.... a 2 y(t) + a 1 y(t) + a 0 y(t) = b 0 x(t) sx( s) X( s) s a 2 s 2 Y(s) + a 1 sy(s) + a 0 Y(s) = b 0 X(s) Heraf (a 2 s 2 + a 1 s + a 0 ) Y(s) = b 0 X(s) Overføringsfunktion Y(s) X(s) = b o a 2 s 2 + a 1 s + a 0
33 En noget enklere simulering med Mathlab Simulink Differentialligningen for den svingende masse:... y = x - y - 0,2 y Laplace-transformation: s 2 Y(s) = X(s) - Y(s) - 0,2 sy(s) Ordnet: (s 2 + 0,2 s + 1) Y(s) = X(s) Overføringsfunktion: Y X 1 (s) = s2 + 0,2 s + 1 Simulering med Mathlab Simulink: Step 1 s 2+0.2s+1 Transfer Fcn Scope
34
35 Eksempler på større analogsimuleringer udført af undertegnede Temperaturforløbet i en gammeldags kølevogn, kølet af smeltende is-barrer
36 Eksempler på større analogsimuleringer udført af undertegnede Temperaturforløbet i en gammeldags kølevogn, kølet af smeltende is. Styring af hejseværker i portalkran (for B&W)
37 Eksempler på større analogsimuleringer udført af undertegnede Temperaturforløbet i en gammeldags kølevogn, kølet af smeltende is. Styring af hejseværker i portalkran (for B&W) Styring af et missil (for norsk forsvarsindustri)
38 Eksempler på større analogsimuleringer udført af undertegnede Temperaturforløbet i en gammeldags kølevogn, kølet af smeltende is. Styring af hejseværker i portalkran (for B&W) Styring af et missil (for norsk forsvarsindustri) Beregning af trykstød i en pipeline af plast (for Dansk Salt) Styring af pumperne til omtalte pipeline
39 Eksempler på større analogsimuleringer udført af undertegnede Temperaturforløbet i en gammeldags kølevogn, kølet af smeltende is. Styring af hejseværker i portalkran (for B&W) Styring af et missil (for norsk forsvarsindustri) Beregning af trykstød i en pipeline af plast (for Dansk Salt) Styring af pumperne til omtalte pipeline Synkronisering af skibsdieselmotorer
40 Eksempler på større analogsimuleringer udført af undertegnede Temperaturforløbet i en gammeldags kølevogn, kølet af smeltende is. Styring af hejseværker i portalkran (for B&W) Styring af et missil (for norsk forsvarsindustri) Beregning af trykstød i en pipeline af plast (for Dansk Salt) Styring af pumperne til omtalte pipeline Synkronisering af skibsdieselmotorer Beregning af temperatursvingningerne i Ørsted-satellitten
41 Det omvendte pendul
42
43 Magnetisk vekselfelt 0 x-akse Pendul Trækstang Detektor 1 Oscillator 40kHz Detektor 2
44 U1 U2 Detektor 2 U2-U1 U2 - U1 Udnyttet område 0 x Pendulhovedets position 0 x Pendulhovedets position
45 Joystick Setpunkt Forstærkning i ydre sløjfe (intern indstilling) Forstærkning i servosløjfe (intern indstilling) Detektor 2 Forstærker, filter og ensretter Detektor 1 Forstærker, filter og ensretter + _ + _ PD-regulator Position af magn. sender Extern omskifter Kør + Centrum _ PD-regulator Position af motoraksel Effektforstærker Magnetisk vekselfelt, 40 khz Modtagerspole Sender Modtagerspole Servopotentiometer Senderspænding extern indstilling Forstærkning Spændingsregulator Motor + gear "Det omvendte pendul" Principdiagram for én kanal
46 Matematikken i det omvendte pendul y Tyngdepunkt F Masse m L m G ~ Masseløs stang bevægelse 0 x L = 0,5 m, G = 9,8 m/sek 2
47 Matematikken i det omvendte pendul Pendulets vinkel v i forhold til lodret fås af: y sin(v) = (y x) / L Tyngdepunkt F Masse m Vandret kraft i tyngdepunktet for små vinkler : F = m G tg(v) ~ m G (y x) / L L m G ~ Masseløs stang bevægelse 0 x L = 0,5 m, G = 9,8 m/sek 2
48 Matematikken i det omvendte pendul Pendulets vinkel v i forhold til lodret fås af: y sin(v) = (y x) / L Tyngdepunkt F Masse m Vandret kraft i tyngdepunktet for små vinkler :.. Newtons 2. lov: F = m y F = m G tg(v) ~ m G (y x) / L L m G.. Heraf fås: m y = m G (y x) / L.. y = (G/L) (y x) ~ Masseløs stang bevægelse 0 x L = 0,5 m, G = 9,8 m/sek 2
49 Matematikken i det omvendte pendul Pendulets vinkel v i forhold til lodret fås af: y sin(v) = (y x) / L Tyngdepunkt F Masse m Vandret kraft i tyngdepunktet for små vinkler :.. Newtons 2. lov: F = m y F = m G tg(v) ~ m G (y x) / L L m G.. Heraf fås: m y = m G (y x) / L Laplacetransformeret:.. y = (G/L) (y x) ~ Masseløs stang bevægelse s 2 Y(s) = (G/L) (Y(s) X(s)) [s 2 (G/L)] Y(s) = (G/L) X(s) 0 x L = 0,5 m, G = 9,8 m/sek 2
50 Matematikken i det omvendte pendul Pendulets vinkel v i forhold til lodret fås af: y sin(v) = (y x) / L Tyngdepunkt F Masse m Vandret kraft i tyngdepunktet for små vinkler :.. Newtons 2. lov: F = m y F = m G tg(v) ~ m G (y x) / L L m G.. Heraf fås: m y = m G (y x) / L Laplacetransformeret:.. y = (G/L) (y x) ~ Masseløs stang bevægelse s 2 Y(s) = (G/L) (Y(s) X(s)) [s 2 (G/L)] Y(s) = (G/L) X(s) Overføringsfunktion: 0 x L = 0,5 m, G = 9,8 m/sek 2 Y(s) X(s) (G/L) = = s 2 (G/L) 20 s 2 20 = 20 (s 4,5)(s + 4,5)
51 Pendulet uden regulering Step x(t) -20 s Transfer Fcn y(t) Scope Pendulets bund x(t) Pendulets top y(t)
52 Detaljeret simulering Step s+1 Indgangsfilter -4.0 Gain 0.2s s+1 D-led 0.13e4 s 2+100s+1e4 Servo w = 100rad/s dæmpning = 0.5 Begrænsning +/-0.06m -20 s Pendul Scope 4.6 1e-12s 3+3e-8s 2+3e-4s+1 Detektorfilter wn = 1e4 rad/s 3. orden, kritisk
53 Pendulets bevægelser Indgangssignal Pendulbund Pendultop
54 Analogregnemaskinen kontra datamaten Ulemper ved analogregnemaskinen Pladskrav Mange ledninger Begrænset talområde Begrænset regnenøjagtighed Fordele ved analognemaskinen Fremragende interaktivitet med brugeren Fremragende programmering af simuleringsopgaver, med såvel lineære og ulineære elementer Simulering af dynamiske systemer uden sampling-fejl Umiddelbar respons Konklusion Analogregneteknikken overlever som form, men emuleret på datamater
Elektroniske Kredsløb og Dynamiske Systemer
 Elektroniske Kredsløb og Dynamiske Systemer Lektion 15: Regulering Jan Bendtsen April 14, 2008 EKDS mm. 12 Regulering slide 1 i Basal regulering Hysterese-regulering PID regulatorer i analog Ziegler-Nichols-tuning
Elektroniske Kredsløb og Dynamiske Systemer Lektion 15: Regulering Jan Bendtsen April 14, 2008 EKDS mm. 12 Regulering slide 1 i Basal regulering Hysterese-regulering PID regulatorer i analog Ziegler-Nichols-tuning
Øvelsesvejledning. Frekvenskarakteristikker Simulering og realisering af passive filtre.
 ELT2, Passive filter, frekvenskarakteristikker Øvelsesvejledning Frekvenskarakteristikker Simulering og realisering af passive filtre. Øvelsen består af 3 dele: 1. En beregningsdel som du forventes at
ELT2, Passive filter, frekvenskarakteristikker Øvelsesvejledning Frekvenskarakteristikker Simulering og realisering af passive filtre. Øvelsen består af 3 dele: 1. En beregningsdel som du forventes at
Hold 6 Tirsdag. Kristian Krøier, Jacob Christiansen & Thomas Duerlund Jensen Fag: ELA Lærer: Jan Petersen (JPe) Dato for aflevering: 29.
 Dato for aflevering: 29.") ELA journal: Øvelse 3 Grundlæggende Op. Amp. Koblinger. Dato for øvelse:. nov. 00 & 9. nov. 00 Hold 6 Tirsdag Kristian Krøier, Jacob Christiansen & Thomas Duerlund Jensen Fag: ELA Lærer: Jan Petersen (JPe)
ELA journal: Øvelse 3 Grundlæggende Op. Amp. Koblinger. Dato for øvelse:. nov. 00 & 9. nov. 00 Hold 6 Tirsdag Kristian Krøier, Jacob Christiansen & Thomas Duerlund Jensen Fag: ELA Lærer: Jan Petersen (JPe)
Elektroniske Kredsløb og Dynamiske Systemer
 Elektroniske Kredsløb og Dynamiske Systemer Lektion 4: Regulering Jan Bendtsen May, 29 EKDS mm. 4 Regulering slide i Basal regulering Hvorfor regulering? PID regulatorer i analog Ziegler-Nichols-tuning
Elektroniske Kredsløb og Dynamiske Systemer Lektion 4: Regulering Jan Bendtsen May, 29 EKDS mm. 4 Regulering slide i Basal regulering Hvorfor regulering? PID regulatorer i analog Ziegler-Nichols-tuning
Motor til modulerende styring AME 435
 Datablad Motor til modulerende styring AME 435 Beskrivelse ventilens karakteristik kan justeres trinløst mellem lineær og logaritmisk og omvendt. det avancerede design omfatter belastningsafhængige endestopkontakter,
Datablad Motor til modulerende styring AME 435 Beskrivelse ventilens karakteristik kan justeres trinløst mellem lineær og logaritmisk og omvendt. det avancerede design omfatter belastningsafhængige endestopkontakter,
Motorer til modulerende styring AME 10, AME 20, AME 30 AME 13, AME 23, AME 33 med EN 14597-certificeret sikkerhedsfunktion (spring return funktion)
") Motorer til modulerende styring AME 10, AME 20, AME 30 AME 13, AME 23, AME 33 med EN 14597-certificeret sikkerhedsfunktion (spring return funktion) eskrivelse AME 10 AME 13 AME 20, AME 30 AME 23, AME 33
Motorer til modulerende styring AME 10, AME 20, AME 30 AME 13, AME 23, AME 33 med EN 14597-certificeret sikkerhedsfunktion (spring return funktion) eskrivelse AME 10 AME 13 AME 20, AME 30 AME 23, AME 33
Højere Teknisk Eksamen maj 2008. Matematik A. Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING. Undervisningsministeriet
 Højere Teknisk Eksamen maj 2008 HTX081-MAA Matematik A Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING Undervisningsministeriet Fra onsdag den 28. maj til torsdag den 29. maj 2008 Forord
Højere Teknisk Eksamen maj 2008 HTX081-MAA Matematik A Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING Undervisningsministeriet Fra onsdag den 28. maj til torsdag den 29. maj 2008 Forord
Matematik A. Studentereksamen
 Matematik A Studentereksamen stx123-mat/a-07122012 Fredag den 7. december 2012 kl. 9.00-14.00 Opgavesættet er delt i to dele. Delprøven uden hjælpemidler består af opgave 1-6 med i alt 6 spørgsmål. Delprøven
Matematik A Studentereksamen stx123-mat/a-07122012 Fredag den 7. december 2012 kl. 9.00-14.00 Opgavesættet er delt i to dele. Delprøven uden hjælpemidler består af opgave 1-6 med i alt 6 spørgsmål. Delprøven
Svejse traktor WELDYCAR
 Svejse traktor WELDYCAR 1/11 1 -Beskrivelse Weldycar er en 4-hjulstrukken transportabel svejsetraktor, som er specielt designet for mekaniseret svejsning i forskellige positioner (vandret, skrå eller lodret).
Svejse traktor WELDYCAR 1/11 1 -Beskrivelse Weldycar er en 4-hjulstrukken transportabel svejsetraktor, som er specielt designet for mekaniseret svejsning i forskellige positioner (vandret, skrå eller lodret).
Her skal vi se lidt på de kræfter, der påvirker en pil når den affyres og rammer sit mål.
 a. Buens opbygning Her skal vi se lidt på de kræfter, der påvirker en pil når den affyres og rammer sit mål. Buen påvirker pilen med en varierende kraft, der afhænger meget af buens opbygning. For det
a. Buens opbygning Her skal vi se lidt på de kræfter, der påvirker en pil når den affyres og rammer sit mål. Buen påvirker pilen med en varierende kraft, der afhænger meget af buens opbygning. For det
Fasedrejning. Fasedrejning i en kondensator og betragtninger vedrørende RC-led.
 Fasedrejning Fasedrejning i en kondensator og betragtninger vedrørende RC-led. Følgende er nogle betragtninger, der gerne skulle føre frem til en forståelse af forholdene omkring kondensatorers og spolers
Fasedrejning Fasedrejning i en kondensator og betragtninger vedrørende RC-led. Følgende er nogle betragtninger, der gerne skulle føre frem til en forståelse af forholdene omkring kondensatorers og spolers
Kapitel 8. Magnetiske felter - natur, måleenheder m.v. 1 Wb = 1 Tesla = 10.000 Gauss m 2 1 µt (mikrotesla) = 10 mg (miligauss)
 = 10 mg (miligauss)") Kapitel 8 Magnetiske felter - natur, måleenheder m.v. Natur Enhver leder hvori der løber en strøm vil omgives af et magnetfelt. Størrelsen af magnetfeltet er afhængig af strømmen, der løber i lederen og
Kapitel 8 Magnetiske felter - natur, måleenheder m.v. Natur Enhver leder hvori der løber en strøm vil omgives af et magnetfelt. Størrelsen af magnetfeltet er afhængig af strømmen, der løber i lederen og
Filtre. Passive filtre har ikke forstærkende led, som fx operationsforstærkere.
 8/5 Filtre bruges til at fremhæve eller dæmpe nogle frekvenser. Dvs. man kan fx få kraftigere diskant, fremhæve lave toner Passive filtre Passive filtre har ikke forstærkende led, som fx operationsforstærkere.
8/5 Filtre bruges til at fremhæve eller dæmpe nogle frekvenser. Dvs. man kan fx få kraftigere diskant, fremhæve lave toner Passive filtre Passive filtre har ikke forstærkende led, som fx operationsforstærkere.
Grønland. Matematik A. Højere teknisk eksamen
 Grønland Matematik A Højere teknisk eksamen Onsdag den 12. maj 2010 kl. 9.00-14.00 Matematik A Prøvens varighed er 5 timer. Alle hjælpemidler er tilladt. Ved valgopgaver må kun det anførte antal afleveres
Grønland Matematik A Højere teknisk eksamen Onsdag den 12. maj 2010 kl. 9.00-14.00 Matematik A Prøvens varighed er 5 timer. Alle hjælpemidler er tilladt. Ved valgopgaver må kun det anførte antal afleveres
dcomnet-nr. 6 Talrepræsentation Computere og Netværk (dcomnet)
") dcomnet-nr. 6 Talrepræsentation Computere og Netværk (dcomnet) Efterår 2009 1 Talrepræsentation På maskinkodeniveau (Instruction Set Architecture Level) repræsenteres ordrer og operander ved bitfølger
dcomnet-nr. 6 Talrepræsentation Computere og Netværk (dcomnet) Efterår 2009 1 Talrepræsentation På maskinkodeniveau (Instruction Set Architecture Level) repræsenteres ordrer og operander ved bitfølger
Premier. Forforstærkere. Brugervejledning. For modellerne
 Premier Forforstærkere Brugervejledning For modellerne Phono Stage Head Amplifier Line Pre-Amplifier + fjernbetjent version Line / Phono Pre-Amplifier + fjernbetjent version Line / Phono Plus + fjernbetjent
Premier Forforstærkere Brugervejledning For modellerne Phono Stage Head Amplifier Line Pre-Amplifier + fjernbetjent version Line / Phono Pre-Amplifier + fjernbetjent version Line / Phono Plus + fjernbetjent
Armatec. Type FQ. El-aktuator 90 -drejende "fjederretur" for nødlukning eller åbning
 Armatec El-aktuator 90 -drejende "fjederretur" for nødlukning eller åbning Type FQ L. Bernard 90 - drejende el-aktuator type FQ med "fail-safe" funktion er en kompakt og robust kombination af selvspærrende
Armatec El-aktuator 90 -drejende "fjederretur" for nødlukning eller åbning Type FQ L. Bernard 90 - drejende el-aktuator type FQ med "fail-safe" funktion er en kompakt og robust kombination af selvspærrende
2. ordens differentialligninger. Svingninger.
 arts 011, LC. ordens differentialligninger. Svingninger. Fjederkonstant k = 50 kg/s s X S 80 kg F1 F S er forlængelsen af fjederen, når loddets vægt belaster fjederen. X er den påtvungne forlængelse af
arts 011, LC. ordens differentialligninger. Svingninger. Fjederkonstant k = 50 kg/s s X S 80 kg F1 F S er forlængelsen af fjederen, når loddets vægt belaster fjederen. X er den påtvungne forlængelse af
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE
 KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Fysik 2, Klassisk Mekanik 2 Skriftlig eksamen 23. januar 2009 Tilladte hjælpemidler: Medbragt litteratur, noter og lommeregner Besvarelsen må
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Fysik 2, Klassisk Mekanik 2 Skriftlig eksamen 23. januar 2009 Tilladte hjælpemidler: Medbragt litteratur, noter og lommeregner Besvarelsen må
Automatik. ControlMaster PLUS. Tekniske data. Climatix 600. Xenta 300. Uden styreenhed
 ControlMaster PLUS Standardversionen ControlMaster PLUS leveres med én af nedenstående styreenheder. Climatix 600 Denne styreenhed er udviklet specielt til ventilationsaggregater. Softwaren er blevet udviklet
ControlMaster PLUS Standardversionen ControlMaster PLUS leveres med én af nedenstående styreenheder. Climatix 600 Denne styreenhed er udviklet specielt til ventilationsaggregater. Softwaren er blevet udviklet
RKS Yanis E. Bouras 21. december 2010
 Indhold 0.1 Indledning.................................... 1 0.2 Løsning af 2. ordens linære differentialligninger................ 2 0.2.1 Sætning 0.2............................... 2 0.2.2 Bevis af sætning
Indhold 0.1 Indledning.................................... 1 0.2 Løsning af 2. ordens linære differentialligninger................ 2 0.2.1 Sætning 0.2............................... 2 0.2.2 Bevis af sætning
Indholdsfortegnelse :
 Rapporten er udarbejdet af Daniel & Kasper D. 23/1-2001 Indholdsfortegnelse : 1.0 STEPMOTEREN : 4 1.1 Stepmotorens formål : 4 1.2 Stepmotorens opbygning : 4 2.0 PEEL-KREDSEN 4 2.1 PEEL - Kredsen Generelt
Rapporten er udarbejdet af Daniel & Kasper D. 23/1-2001 Indholdsfortegnelse : 1.0 STEPMOTEREN : 4 1.1 Stepmotorens formål : 4 1.2 Stepmotorens opbygning : 4 2.0 PEEL-KREDSEN 4 2.1 PEEL - Kredsen Generelt
BLBd ----------------------------------------------------------
 ---------------------------------------------------------- Blandeboks for tokanalsystem ---------------------------------------------------------------------- FUNKTION Blandeboks for blanding af varm og
---------------------------------------------------------- Blandeboks for tokanalsystem ---------------------------------------------------------------------- FUNKTION Blandeboks for blanding af varm og
Armatec pneumatisk aktuator Kinetrol
 Anvendelse er ideel, hvor man ønsker at dreje, løfte, holde eller stoppe aktuatoren i en bestemt mellemstilling, men stadig ønsker at kunne gøre brug af 0-90 (0-180 ekstra) bevægelsen. Eks. til begrænsning
Anvendelse er ideel, hvor man ønsker at dreje, løfte, holde eller stoppe aktuatoren i en bestemt mellemstilling, men stadig ønsker at kunne gøre brug af 0-90 (0-180 ekstra) bevægelsen. Eks. til begrænsning
Automatik. ControlMaster PLUS. Tekniske data. Climatix 600. Xenta 300. Uden styreenhed
 ControlMaster PLUS Standardversionen ControlMaster PLUS leveres med én af nedenstående styreenheder. Climatix 600 Denne styreenhed er udviklet specielt til ventilationsaggregater. Softwaren er blevet udviklet
ControlMaster PLUS Standardversionen ControlMaster PLUS leveres med én af nedenstående styreenheder. Climatix 600 Denne styreenhed er udviklet specielt til ventilationsaggregater. Softwaren er blevet udviklet
Rumtemperaturregulator med ugekontaktur og LCD
 3 035 Rumtemperaturregulator med ugekontaktur og LCD for varmesystemer RDE10 opunktregulering med ON/OFF-styresignaludgang for opvarmning Driftsformer: Normal- og sparetemperatur Ugekontaktur og manuel
3 035 Rumtemperaturregulator med ugekontaktur og LCD for varmesystemer RDE10 opunktregulering med ON/OFF-styresignaludgang for opvarmning Driftsformer: Normal- og sparetemperatur Ugekontaktur og manuel
Antennens udstrålingsmodstand hvad er det for en størrelse?
 Antennens udstrålingsmodstand hvad er det for en størrelse? Det faktum, at lyset har en endelig hastighed er en forudsætning for at en antenne udstråler, og at den har en ohmsk udstrålingsmodstand. Den
Antennens udstrålingsmodstand hvad er det for en størrelse? Det faktum, at lyset har en endelig hastighed er en forudsætning for at en antenne udstråler, og at den har en ohmsk udstrålingsmodstand. Den
Kaotisk kuglebevægelse En dynamisk analyse
 Kaotisk kuglebevægelse En dynamisk analyse Ole Witt-Hansen 08 Kaotisk kuglebevægelse Kaotisk bevægelse Kaotiske bevægelser opstår, når bevægelsesligningerne ikke er lineære. Interessen for kaotiske bevægelser
Kaotisk kuglebevægelse En dynamisk analyse Ole Witt-Hansen 08 Kaotisk kuglebevægelse Kaotisk bevægelse Kaotiske bevægelser opstår, når bevægelsesligningerne ikke er lineære. Interessen for kaotiske bevægelser
PLC implementering af operatørpanel
 PLC implementering af operatørpanel Begreber HMI: HMI står for Human Machine Interface, oversat til dansk betyder det mennesker, maskiner og oversættelser af signaler eller forbindelser. SRO: SRO betyder
PLC implementering af operatørpanel Begreber HMI: HMI står for Human Machine Interface, oversat til dansk betyder det mennesker, maskiner og oversættelser af signaler eller forbindelser. SRO: SRO betyder
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE
 KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Fysik 2, Klassisk Mekanik 2 Skriftlig eksamen 16. april 2009 Tilladte hjælpemidler: Medbragt litteratur, noter og lommeregner Besvarelsen må
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Fysik 2, Klassisk Mekanik 2 Skriftlig eksamen 16. april 2009 Tilladte hjælpemidler: Medbragt litteratur, noter og lommeregner Besvarelsen må
Vejledende Matematik A
 Vejledende Matematik A Prøvens varighed er 5 timer. Alle hjælpemidler er tilladt. Af opgaverne 10A, 10B, 10C og 10D skal kun én opgave afleveres til bedømmelse. Hvis flere end én opgave afleveres, bedømmes
Vejledende Matematik A Prøvens varighed er 5 timer. Alle hjælpemidler er tilladt. Af opgaverne 10A, 10B, 10C og 10D skal kun én opgave afleveres til bedømmelse. Hvis flere end én opgave afleveres, bedømmes
GUX. Matematik. A-Niveau. August 2015. Kl. 9.00-14.00. Prøveform a GUX152 - MAA
 GUX Matematik A-Niveau August 05 Kl. 9.00-4.00 Prøveform a GUX5 - MAA Matematik A Prøvens varighed er 5 timer. Prøven består af opgaverne til 0 med i alt 5 spørgsmål. De 5 spørgsmål indgår med lige vægt
GUX Matematik A-Niveau August 05 Kl. 9.00-4.00 Prøveform a GUX5 - MAA Matematik A Prøvens varighed er 5 timer. Prøven består af opgaverne til 0 med i alt 5 spørgsmål. De 5 spørgsmål indgår med lige vægt
3 Overføringsfunktion
 1 3 Overføringsfunktion 3.1 Overføringsfunktion For et system som vist på figur 3.1 er overføringsfunktionen givet ved: Y (s) =H(s) X(s) [;] (3.1) Y (s) X(s) = H(s) [;] (3.2) Y (s) er den Laplacetransformerede
1 3 Overføringsfunktion 3.1 Overføringsfunktion For et system som vist på figur 3.1 er overføringsfunktionen givet ved: Y (s) =H(s) X(s) [;] (3.1) Y (s) X(s) = H(s) [;] (3.2) Y (s) er den Laplacetransformerede
Formelsamling Matematik C
 Formelsamling Matematik C Ib Michelsen Ikast 2011 Ligedannede trekanter Hvis to trekanter er ensvinklede har de proportionale sider (dvs. alle siderne i den ene er forstørrelser af siderne i den anden
Formelsamling Matematik C Ib Michelsen Ikast 2011 Ligedannede trekanter Hvis to trekanter er ensvinklede har de proportionale sider (dvs. alle siderne i den ene er forstørrelser af siderne i den anden
Øvelse i Feed forward af 1. ordens system med PLC
 Øvelse i Feed forward af 1. ordens system med PLC Formål Forsøgsopstilling 1 Feed forward af 1. ordens system Overløbs- / trykudligningsslange Procesrør Formålet med øvelsen er at lave en proportional-regulator
Øvelse i Feed forward af 1. ordens system med PLC Formål Forsøgsopstilling 1 Feed forward af 1. ordens system Overløbs- / trykudligningsslange Procesrør Formålet med øvelsen er at lave en proportional-regulator
N L1 AC 230 V AC 24 V - + DC 24 V
 GM A/A Tilslutning V via sikkerhedstransformer. N L AC V N L AC V GM A For adskillelse fra nettet anvendes en kontakt med min. mm kontaktåbning. GM A GM A GM A GM A Paralleldrift af flere motorer mulig.
GM A/A Tilslutning V via sikkerhedstransformer. N L AC V N L AC V GM A For adskillelse fra nettet anvendes en kontakt med min. mm kontaktåbning. GM A GM A GM A GM A Paralleldrift af flere motorer mulig.
Måleværdiprocessor for behovsstyret ventilation AQP63.1
 1 959 1959P02 Måleværdiprocessor for behovsstyret ventilation til brug sammen med CO 2 /VOC-føler QPA63 AQP631 Driftsspænding AC 24 V Indgangssignaler DC 010 V Udgangssignal DC 010 V Anvendelse I ventilations-
1 959 1959P02 Måleværdiprocessor for behovsstyret ventilation til brug sammen med CO 2 /VOC-føler QPA63 AQP631 Driftsspænding AC 24 V Indgangssignaler DC 010 V Udgangssignal DC 010 V Anvendelse I ventilations-
BE17 BETJENINGSVEJLEDNING SPÆNDINGSTESTER TRT-BA-BE17-TC-001-DA
 BE17 DA BETJENINGSVEJLEDNING SPÆNDINGSTESTER TRT-BA-BE17-TC-001-DA Indholdsfortegnelse Henvisninger vedrørende betjeningsvejledningen... 1 Sikkerhed... 2 Oplysninger om enheden... 3 Tekniske data... 3
BE17 DA BETJENINGSVEJLEDNING SPÆNDINGSTESTER TRT-BA-BE17-TC-001-DA Indholdsfortegnelse Henvisninger vedrørende betjeningsvejledningen... 1 Sikkerhed... 2 Oplysninger om enheden... 3 Tekniske data... 3
Maskinanlæg, opsætning af frekvensomformer
 Maskinanlæg, opsætning af frekvensomformer INDHOLDSFORTEGNELSE Opgaver - Maskinanlæg, opsætning af frekvensomformer...3 2-20 Rekv. 0 Prod. 28-06-2006-08:33 Ordre 000 EFU Opgave 1 1 stk. VLT 2800 1 stk.
Maskinanlæg, opsætning af frekvensomformer INDHOLDSFORTEGNELSE Opgaver - Maskinanlæg, opsætning af frekvensomformer...3 2-20 Rekv. 0 Prod. 28-06-2006-08:33 Ordre 000 EFU Opgave 1 1 stk. VLT 2800 1 stk.
STUDENTEREKSAMEN AUGUST 2009 MATEMATIK A-NIVEAU. Onsdag den 12. august 2009. Kl. 09.00 14.00 STX092-MAA. Undervisningsministeriet
 STUDENTEREKSAMEN AUGUST 009 MATEMATIK A-NIVEAU Onsdag den 1. august 009 Kl. 09.00 14.00 STX09-MAA Undervisningsministeriet Opgavesættet er delt i to dele. Delprøven uden hjælpemidler består af opgave 1-5
STUDENTEREKSAMEN AUGUST 009 MATEMATIK A-NIVEAU Onsdag den 1. august 009 Kl. 09.00 14.00 STX09-MAA Undervisningsministeriet Opgavesættet er delt i to dele. Delprøven uden hjælpemidler består af opgave 1-5
Sandsynlighedsregning Stokastisk variabel
 Sandsynlighedsregning Stokastisk variabel I eksperimenter knyttes ofte en talværdi til hvert udfald. S s X(s) R Definition: En stokastisk variabel X er en funktion defineret på S, der antager værdier på
Sandsynlighedsregning Stokastisk variabel I eksperimenter knyttes ofte en talværdi til hvert udfald. S s X(s) R Definition: En stokastisk variabel X er en funktion defineret på S, der antager værdier på
Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5
![Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5](/thumbs/58/42578746.jpg "Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5") Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5 Nøgleord og begreber Vækstmodel Bevægelsesligninger Retningsfelt Eulers metode Separable ligninger Logistisk ligning Eksponentiel vækst Begyndelsesværdiproblem Calculus
Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5 Nøgleord og begreber Vækstmodel Bevægelsesligninger Retningsfelt Eulers metode Separable ligninger Logistisk ligning Eksponentiel vækst Begyndelsesværdiproblem Calculus
Studieretningsopgave
 Virum Gymnasium Studieretningsopgave Harmoniske svingninger i matematik og fysik Vejledere: Christian Holst Hansen (matematik) og Bodil Dam Heiselberg (fysik) 30-01-2014 Indholdsfortegnelse Indledning...
Virum Gymnasium Studieretningsopgave Harmoniske svingninger i matematik og fysik Vejledere: Christian Holst Hansen (matematik) og Bodil Dam Heiselberg (fysik) 30-01-2014 Indholdsfortegnelse Indledning...
Operationsforstærkere
 OPamps 1/12215 Kompendium / noter til: Operationsforstærkere Links til afsnit: Generelt, Splitsupply, Impedanskonverter, Delta_Ui_Fejl, Noninverting_Amp, Inverting_Amp, Summationsforstærker, Single_Supply,
OPamps 1/12215 Kompendium / noter til: Operationsforstærkere Links til afsnit: Generelt, Splitsupply, Impedanskonverter, Delta_Ui_Fejl, Noninverting_Amp, Inverting_Amp, Summationsforstærker, Single_Supply,
Analyseopgaver. Forklar kredsløbet. Forklar kredsløbet. 3.0 DC Adapter med Batteri Backup.
 Analyseopgaver. Simpel NiMH lader. Forklar kredsløbet.. Infrarød Remote Control tester Forklar kredsløbet.. DC Adapter med Batteri Backup. Der bruges en ustabiliseret Volt adapter. Den giver normalt ca.
Analyseopgaver. Simpel NiMH lader. Forklar kredsløbet.. Infrarød Remote Control tester Forklar kredsløbet.. DC Adapter med Batteri Backup. Der bruges en ustabiliseret Volt adapter. Den giver normalt ca.
HTX. Matematik A. Onsdag den 11. maj Kl GL111 - MAA - HTX
 HTX Matematik A Onsdag den 11. maj 2011 Kl. 09.00-14.00 GL111 - MAA - HTX 1 2 Side 1 af 7 sider Matematik A Prøvens varighed er 5 timer. Alle hjælpemidler er tilladt. Ved valgopgaver må kun det anførte
HTX Matematik A Onsdag den 11. maj 2011 Kl. 09.00-14.00 GL111 - MAA - HTX 1 2 Side 1 af 7 sider Matematik A Prøvens varighed er 5 timer. Alle hjælpemidler er tilladt. Ved valgopgaver må kun det anførte
Opgavesæt udviklet til kursus 48115. Grundlæggende elektronik på mobile maskiner 2. Udviklet i 2015
 Opgavesæt udviklet til kursus 48115 Grundlæggende elektronik på mobile maskiner 2 Udviklet i 2015 Ministeriet for Børn, Undervisning og Ligestilling (april, 2016). Materialet er udviklet af Metalindustriens
Opgavesæt udviklet til kursus 48115 Grundlæggende elektronik på mobile maskiner 2 Udviklet i 2015 Ministeriet for Børn, Undervisning og Ligestilling (april, 2016). Materialet er udviklet af Metalindustriens
Teknologi & kommunikation
 Grundlæggende Side af NV Elektrotekniske grundbegreber Version.0 Spænding, strøm og modstand Elektricitet: dannet af det græske ord elektron, hvilket betyder rav, idet man tidligere iagttog gnidningselektricitet
Grundlæggende Side af NV Elektrotekniske grundbegreber Version.0 Spænding, strøm og modstand Elektricitet: dannet af det græske ord elektron, hvilket betyder rav, idet man tidligere iagttog gnidningselektricitet
STUDENTEREKSAMEN GUX MAJ 2007 2014 MATEMATIK A-NIVEAU. Prøveform b. Kl. 9.00 14.00 GUX-MAA
 STUDENTEREKSAMEN GUX MAJ 007 014 MATEMATIK A-NIVEAU Prøveform b 014 Kl. 9.00 14.00 GUX-MAA Matematik A Prøvens varighed er 5 timer. Delprøven uden hjælpemidler består af opgaverne 1 til 6 med i alt 6 spørgsmål.
STUDENTEREKSAMEN GUX MAJ 007 014 MATEMATIK A-NIVEAU Prøveform b 014 Kl. 9.00 14.00 GUX-MAA Matematik A Prøvens varighed er 5 timer. Delprøven uden hjælpemidler består af opgaverne 1 til 6 med i alt 6 spørgsmål.
DC-Motor Controller. Brugermanual
 Forside Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK DC-Motor Controller Brugermanual Firmware V4.00 Produkt indhold 1 styreboks til styring af 1 DC-motor. 1 strømforsyning 100 240 volt
Forside Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK DC-Motor Controller Brugermanual Firmware V4.00 Produkt indhold 1 styreboks til styring af 1 DC-motor. 1 strømforsyning 100 240 volt
Fysik 2 - Den Harmoniske Oscillator
 Fysik 2 - Den Harmoniske Oscillator Esben Bork Hansen, Amanda Larssen, Martin Qvistgaard Christensen, Maria Cavallius 5. januar 2009 Indhold 1 Formål 1 2 Forsøget 2 3 Resultater 3 4 Teori 4 4.1 simpel
Fysik 2 - Den Harmoniske Oscillator Esben Bork Hansen, Amanda Larssen, Martin Qvistgaard Christensen, Maria Cavallius 5. januar 2009 Indhold 1 Formål 1 2 Forsøget 2 3 Resultater 3 4 Teori 4 4.1 simpel
TEKNIK. BSc05-ID1B PROJEKT: INTERAKTIVT FYSISK PRODUKT 5. SEMESTER INDUSTRIEL DESIGN JAN. 2016
 TEKNIK BSc05-ID1B PROJEKT: INTERAKTIVT FYSISK PRODUKT 5. SEMESTER INDUSTRIEL DESIGN JAN. 2016 David Qvist Mads Svensk Jessen Martin Juul Jensen Rebekka Rønn INDHOLD Eksploderet tegning 1:5 Stykliste Overslagsberegninger
TEKNIK BSc05-ID1B PROJEKT: INTERAKTIVT FYSISK PRODUKT 5. SEMESTER INDUSTRIEL DESIGN JAN. 2016 David Qvist Mads Svensk Jessen Martin Juul Jensen Rebekka Rønn INDHOLD Eksploderet tegning 1:5 Stykliste Overslagsberegninger
Solpaneler til svømmebassin og spa.
 Solpaneler til svømmebassin og spa. Der tages forbehold for evt. produktændringer. Copyright. Welldana A/S Udgave 1,0 01-2008. Dansk. Teknisk data. Materiale. Farve. Tilslutning. Størrelser. Vandgennemstrømning.
Solpaneler til svømmebassin og spa. Der tages forbehold for evt. produktændringer. Copyright. Welldana A/S Udgave 1,0 01-2008. Dansk. Teknisk data. Materiale. Farve. Tilslutning. Størrelser. Vandgennemstrømning.
INSTALLATIONS- manual IB2. Impulsrelæ til to individuelt styrede motorer
 061110 Ref: IB2-im1822041_dk.pdf INSTALLATIONS- DK manual Art.nr. 1822041 IB2 Impulsrelæ til to individuelt styrede motorer Med IB2 kan to motorer styres individuelt samtidig med motorerne tager imod centrale
061110 Ref: IB2-im1822041_dk.pdf INSTALLATIONS- DK manual Art.nr. 1822041 IB2 Impulsrelæ til to individuelt styrede motorer Med IB2 kan to motorer styres individuelt samtidig med motorerne tager imod centrale
Projekt - RoboNet Del Journal.
 Projekt - RoboNet Del Journal. A/D Konvertering. Udarbejdet af: Klaus Jørgensen. Gruppe: Jacob Clausen, Klaus Jørgensen og Ole Rud It og Elektronikteknolog, a Erhvervsakademiet Fyn Udarbejdet i perioden:
Projekt - RoboNet Del Journal. A/D Konvertering. Udarbejdet af: Klaus Jørgensen. Gruppe: Jacob Clausen, Klaus Jørgensen og Ole Rud It og Elektronikteknolog, a Erhvervsakademiet Fyn Udarbejdet i perioden:
Højere Handelseksamen Handelsskolernes enkeltfagsprøve Maj 2007. Matematik Niveau A
 Højere Handelseksamen Handelsskolernes enkeltfagsprøve Maj 2007 07-0-1 Matematik Niveau A Dette opgavesæt består af 8 opgaver, der indgår i bedømmelsen af den samlede opgavebesvarelse med følgende omtrentlige
Højere Handelseksamen Handelsskolernes enkeltfagsprøve Maj 2007 07-0-1 Matematik Niveau A Dette opgavesæt består af 8 opgaver, der indgår i bedømmelsen af den samlede opgavebesvarelse med følgende omtrentlige
Kulstofnanorør - småt gør stærk Side 20-23 i hæftet
 Kulstofnanorør - småt gør stærk Side 20-23 i hæftet SMÅ FORSØG OG OPGAVER Lineal-lyd 1 Lineal-lyd 2 En lineal holdes med den ene hånd fast ud over en bordkant. Med den anden anslås linealen. Det sker ved
Kulstofnanorør - småt gør stærk Side 20-23 i hæftet SMÅ FORSØG OG OPGAVER Lineal-lyd 1 Lineal-lyd 2 En lineal holdes med den ene hånd fast ud over en bordkant. Med den anden anslås linealen. Det sker ved
Indhold. Figur 1: Blokdiagram over regulatorprincip
 Indhold.1 Beskrivelse af regulatorer............................. 2.2 Krav til regulator................................. 2.2.1 Integrator anti-windup.......................... 4.3 Overføringsfunktion
Indhold.1 Beskrivelse af regulatorer............................. 2.2 Krav til regulator................................. 2.2.1 Integrator anti-windup.......................... 4.3 Overføringsfunktion
Montage og brugsanvisning
 Montage og brugsanvisning System JA 3000 Standalone styring for befugter og affugter for relativ fugtighed eller dugpunkt. Indholdsfortegnelse Ophavsrettigheder... 3 EU overensstemmelseserklæring... 4
Montage og brugsanvisning System JA 3000 Standalone styring for befugter og affugter for relativ fugtighed eller dugpunkt. Indholdsfortegnelse Ophavsrettigheder... 3 EU overensstemmelseserklæring... 4
Differentialregning Infinitesimalregning
 Udgave 2.1 Differentialregning Infinitesimalregning Noterne gennemgår begreberne differentialregning, og anskuer dette som et derligere redskab til vækst og funktioner. Noterne er supplement til kapitel
Udgave 2.1 Differentialregning Infinitesimalregning Noterne gennemgår begreberne differentialregning, og anskuer dette som et derligere redskab til vækst og funktioner. Noterne er supplement til kapitel
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE
 KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Fysik 2, Klassisk mekanik 2 - ny og gammel ordning Skriftlig eksamen 25. januar 2008 Tillae hjælpemidler: Medbragt litteratur, noter og lommeregner
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Fysik 2, Klassisk mekanik 2 - ny og gammel ordning Skriftlig eksamen 25. januar 2008 Tillae hjælpemidler: Medbragt litteratur, noter og lommeregner
2. Christian den Fjerde. Årsplan 2015 2016 (Matematik PHO) Elevbog s. 2-11
 Elevbog s. 2-11") Lærer. Pernille Holst Overgaard Lærebogsmateriale. Format 2 Tid og fagligt område Aktivitet Læringsmål Uge 33-36 Elevbog s. 2-11 Additions måder. Vi kende forskellige måder at Addition arbejder med addition
Lærer. Pernille Holst Overgaard Lærebogsmateriale. Format 2 Tid og fagligt område Aktivitet Læringsmål Uge 33-36 Elevbog s. 2-11 Additions måder. Vi kende forskellige måder at Addition arbejder med addition
Opgaveformuleringer til studieprojekt - Matematik og andet/andre fag:
 Opgaveformuleringer til studieprojekt - Matematik og andet/andre fag: Fag: Matematik/Historie Emne: Det gyldne snit og Fibonaccitallene Du skal give en matematisk behandling af det gyldne snit. Du skal
Opgaveformuleringer til studieprojekt - Matematik og andet/andre fag: Fag: Matematik/Historie Emne: Det gyldne snit og Fibonaccitallene Du skal give en matematisk behandling af det gyldne snit. Du skal
Af: Valle Thorø Fil.: Oscilloscopet Side 1 af 10
 Oscilloscopet Kilde: http://www.doctronics.co.uk/scope.htm Følgende billede viser forsiden på et typisk oscilloskop. Nogle af knapperne og deres indstillinger forklares i det følgende.: Blokdiagram for
Oscilloscopet Kilde: http://www.doctronics.co.uk/scope.htm Følgende billede viser forsiden på et typisk oscilloskop. Nogle af knapperne og deres indstillinger forklares i det følgende.: Blokdiagram for
INSTRUKTION. Bernard el-aktuator
 INSTRUKTION IN113, Nr. B104DKE Bernard el-aktuator Type SQ100, SQ250 SQ400, SQ600, SQ1000 Indhold Opstart... 2 Normal lukkeretning... 3 Komplet leverance... 3 1. Indstilling af mekaniske anslag, 90 -drejende...
INSTRUKTION IN113, Nr. B104DKE Bernard el-aktuator Type SQ100, SQ250 SQ400, SQ600, SQ1000 Indhold Opstart... 2 Normal lukkeretning... 3 Komplet leverance... 3 1. Indstilling af mekaniske anslag, 90 -drejende...
Eksamensspørgsmål: Trekantberegning
 Eksamensspørgsmål: Trekantberegning Indhold Definition af Sinus og Cosinus... 1 Bevis for Sinus- og Cosinusformlerne... 3 Tangens... 4 Pythagoras s sætning... 4 Arealet af en trekant... 7 Vinkler... 8
Eksamensspørgsmål: Trekantberegning Indhold Definition af Sinus og Cosinus... 1 Bevis for Sinus- og Cosinusformlerne... 3 Tangens... 4 Pythagoras s sætning... 4 Arealet af en trekant... 7 Vinkler... 8
Elektrisk aktuator AME 855
 Datablad Elektrisk aktuator AME 855 Beskrivelse Aktuator AME 855 kan styres af elektroniske regulatorer med modulerende eller 3-punktsregulerings-udgang. Aktuator kan anvendes med VF3-ventiler (DN 200-300).
Datablad Elektrisk aktuator AME 855 Beskrivelse Aktuator AME 855 kan styres af elektroniske regulatorer med modulerende eller 3-punktsregulerings-udgang. Aktuator kan anvendes med VF3-ventiler (DN 200-300).
Agrosilo med 60 bund. Silo med låg, filter og indblæsning. Silo type. Tilbehør / fradrag. Tilbehør / fradrag
 Agrosilo med 60 bund Silo type Beskrivelse Bestillingsnummer Beskrivelse Bestillings- DKK nummer DKK Ben sæt 1000 mm Agro, små 4.90.1003 1.550,- Ben sæt 2500 mm Agro, små 4.90.2503 2.,- Ben sæt 1100 mm
Agrosilo med 60 bund Silo type Beskrivelse Bestillingsnummer Beskrivelse Bestillings- DKK nummer DKK Ben sæt 1000 mm Agro, små 4.90.1003 1.550,- Ben sæt 2500 mm Agro, små 4.90.2503 2.,- Ben sæt 1100 mm
Rev.: Juni 1997 Udgave: rel. 12/96 Produkt: EWPC 907
 BESKRIVELSE EWPC 907 er en temperaturstyring med dobbelt udgang, der fungerer enten uafhængigt eller afhængigt af hinanden (2-trins); den primære udgang giver mulighed for valg mellem ON/OFF, PD eller
BESKRIVELSE EWPC 907 er en temperaturstyring med dobbelt udgang, der fungerer enten uafhængigt eller afhængigt af hinanden (2-trins); den primære udgang giver mulighed for valg mellem ON/OFF, PD eller
Danmarks Tekniske Universitet
 Danmarks Tekniske Universitet Side 1 af 9 sider Skriftlig prøve, torsdag den 24. maj, 2007, kl. 9:00-13:00 Kursus navn: Fysik 1 Kursus nr. 10022 Tilladte hjælpemidler: Alle hjælpemidler er tilladt. "Vægtning":
Danmarks Tekniske Universitet Side 1 af 9 sider Skriftlig prøve, torsdag den 24. maj, 2007, kl. 9:00-13:00 Kursus navn: Fysik 1 Kursus nr. 10022 Tilladte hjælpemidler: Alle hjælpemidler er tilladt. "Vægtning":
ræsonnere og argumentere intuitivt om konkrete matematiske aktiviteter og følge andres mundtlige argumenter (ræsonnementskompetence)
") Matematiske kompetencer indgå i dialog om spørgsmål og svar, som er karakteristiske i arbejdet med matematik (tankegangskompetence) løse matematiske problemer knyttet til en kontekst, der giver mulighed
Matematiske kompetencer indgå i dialog om spørgsmål og svar, som er karakteristiske i arbejdet med matematik (tankegangskompetence) løse matematiske problemer knyttet til en kontekst, der giver mulighed
i x-aksens retning, så fås ). Forskriften for g fås altså ved i forskriften for f at udskifte alle forekomster af x med x x 0
. Forskriften for g fås altså ved i forskriften for f at udskifte alle forekomster af x med x x 0") BAndengradspolynomier Et polynomium er en funktion på formen f ( ) = an + an + a+ a, hvor ai R kaldes polynomiets koefficienter. Graden af et polynomium er lig med den højeste potens af, for hvilket den
BAndengradspolynomier Et polynomium er en funktion på formen f ( ) = an + an + a+ a, hvor ai R kaldes polynomiets koefficienter. Graden af et polynomium er lig med den højeste potens af, for hvilket den
Koblede differentialligninger.
 2. 3. 4. Koblede differentialligninger. En udvidelse af Newtons afkølingslov løst numerisk ved hjælp af integralkurver. Sidste gang så vi på, hvordan vi kunne opstille og løse en model for afkølingen af
2. 3. 4. Koblede differentialligninger. En udvidelse af Newtons afkølingslov løst numerisk ved hjælp af integralkurver. Sidste gang så vi på, hvordan vi kunne opstille og løse en model for afkølingen af
Gr. 08 Proportionalventiler
 Gr. 8 Proportionalventiler Proportionalventil XD3 XD.3.A dimensioner: ARON XD.3.C dimensioner: 83 24 12 ø9 ø5.5 CH. 24 83 12 ø9 ø5.5 32.5 51 24 32.5 51 Or 2-12/9 8 69.5 155 8 OR 2-12/9 69.5 229.5 8 P1
Gr. 8 Proportionalventiler Proportionalventil XD3 XD.3.A dimensioner: ARON XD.3.C dimensioner: 83 24 12 ø9 ø5.5 CH. 24 83 12 ø9 ø5.5 32.5 51 24 32.5 51 Or 2-12/9 8 69.5 155 8 OR 2-12/9 69.5 229.5 8 P1
Digital positioner type RE 3446
 Installations- og driftsvejledning IN145 Digital positioner type Indholdsfortegnelse: Side 1 Generel information 2 2 Montering og tilslutning 2 3 Idriftsættelse 3 4 Drifts funktioner 6 5 Funktions beskrivelser
Installations- og driftsvejledning IN145 Digital positioner type Indholdsfortegnelse: Side 1 Generel information 2 2 Montering og tilslutning 2 3 Idriftsættelse 3 4 Drifts funktioner 6 5 Funktions beskrivelser
MICROCHILLER 2 Manual 001721B02
 MICROCHILLER 2 Manual 001721B02 Udgave 07.08 Erstatter 06.05 Brugervejledning BRUGER Version Brugergrænseflade Grønt 3 cifret display (plustegn og komma), gult driftssignal og rødt alarmsignal. Betydning
MICROCHILLER 2 Manual 001721B02 Udgave 07.08 Erstatter 06.05 Brugervejledning BRUGER Version Brugergrænseflade Grønt 3 cifret display (plustegn og komma), gult driftssignal og rødt alarmsignal. Betydning
CARL BRO GRUPPEN TRAFIKDAGE PÅ AALBORG UNIVERSITET. 22. - 23. august 2005
 CARL BRO GRUPPEN TRAFIKDAGE PÅ AALBORG UNIVERSITET 22. - 23. august 2005 CARL BRO GRUPPEN TRAFIKDAGE PÅ AALBORG UNIVERSITET En metode til sammenlægning af støj fra forskellige kilder Grundlaget er Orientering
CARL BRO GRUPPEN TRAFIKDAGE PÅ AALBORG UNIVERSITET 22. - 23. august 2005 CARL BRO GRUPPEN TRAFIKDAGE PÅ AALBORG UNIVERSITET En metode til sammenlægning af støj fra forskellige kilder Grundlaget er Orientering
SeeTool - KNX løsninger til
 SeeTool - KNX løsninger til Erhversbygninger Program 8.0.0.0.0.3 Kontinuert dagsregulering med PIR og manuel betjening - enkelt Lysreguleringsfunktioner Lyset tændes og slukkes automatisk afhængigt af
SeeTool - KNX løsninger til Erhversbygninger Program 8.0.0.0.0.3 Kontinuert dagsregulering med PIR og manuel betjening - enkelt Lysreguleringsfunktioner Lyset tændes og slukkes automatisk afhængigt af
Kapitlet indledes med en beskrivelse af - og opgaver med - de tre former for sandsynlighed, som er omtalt i læseplanen for 7.- 9.
 Kapitlet indledes med en beskrivelse af - og opgaver med - de tre former for sandsynlighed, som er omtalt i læseplanen for 7.- 9. klassetrin: statistisk sandsynlighed, kombinatorisk sandsynlighed og personlig
Kapitlet indledes med en beskrivelse af - og opgaver med - de tre former for sandsynlighed, som er omtalt i læseplanen for 7.- 9. klassetrin: statistisk sandsynlighed, kombinatorisk sandsynlighed og personlig
SeeTool - KNX løsninger til
 SeeTool - KNX løsninger til Erhversbygninger Program 8.0.0.0.0.3 Kontinuert dagsregulering med PIR og manuel dæmp/ betjening Lysreguleringsfunktioner Lyset tændes og slukkes automatisk afhængigt af folks
SeeTool - KNX løsninger til Erhversbygninger Program 8.0.0.0.0.3 Kontinuert dagsregulering med PIR og manuel dæmp/ betjening Lysreguleringsfunktioner Lyset tændes og slukkes automatisk afhængigt af folks
Betjeningsvejledning Zircon MT6 Metaldetektor
 Betjeningsvejledning Zircon MT6 Metaldetektor El.nr. 63 98 401 551 Indhold Generelt... 1 Installering af batteri... 1 Bliv fortrolig med instrumentet... 1 Tænd og sluk for instrumentet... 2 Genscanning
Betjeningsvejledning Zircon MT6 Metaldetektor El.nr. 63 98 401 551 Indhold Generelt... 1 Installering af batteri... 1 Bliv fortrolig med instrumentet... 1 Tænd og sluk for instrumentet... 2 Genscanning
INSTITUT FOR DATALOGI, AARHUS UNIVERSITET
 INSTITUT FOR DATALOGI, AARHUS UNIVERSITET Science and Technology EKSAMEN Antal sider i opgavesættet (incl. forsiden): 6 (seks) Eksamensdag: Fredag den 22. juni 2012, kl. 9.00-13.00 Eksamenslokale: Finlandsgade
INSTITUT FOR DATALOGI, AARHUS UNIVERSITET Science and Technology EKSAMEN Antal sider i opgavesættet (incl. forsiden): 6 (seks) Eksamensdag: Fredag den 22. juni 2012, kl. 9.00-13.00 Eksamenslokale: Finlandsgade
Elektronikken bag medicinsk måleudstyr
 Elektronikken bag medicinsk måleudstyr Måling af svage elektriske signaler Indholdsfortegnelse Indholdsfortegnelse... 1 Introduktion... 1 Grundlæggende kredsløbteknik... 2 Ohms lov... 2 Strøm- og spændingsdeling...
Elektronikken bag medicinsk måleudstyr Måling af svage elektriske signaler Indholdsfortegnelse Indholdsfortegnelse... 1 Introduktion... 1 Grundlæggende kredsløbteknik... 2 Ohms lov... 2 Strøm- og spændingsdeling...
Analog Øvelser. Version. A.1 Afladning af kondensator. Opbyg følgende kredsløb: U TL = 70 % L TL = 50 %
 A.1 Afladning af kondensator Opbyg følgende kredsløb: U TL = 70 % L TL = 50 % Når knappen har været aktiveret, ønskes lys i D1 i 30 sekunder. Brug formlen U C U start e t RC Beskriv kredsløbet Find komponenter.
A.1 Afladning af kondensator Opbyg følgende kredsløb: U TL = 70 % L TL = 50 % Når knappen har været aktiveret, ønskes lys i D1 i 30 sekunder. Brug formlen U C U start e t RC Beskriv kredsløbet Find komponenter.
Hydrostatiske transmissioner
 Hydrostatiske transmissioner Erhvervsskolerne Aars Hydrostatisk transmissioner HYDROSTATISKE TRANSMISSIONER...1 EGENSKABER...1 HYDROSTATISK TRANSMISSION...3 EFTERFYLDE...4 HOVEDSYSTEM...5 REGULERINGSSYSTEM...6
Hydrostatiske transmissioner Erhvervsskolerne Aars Hydrostatisk transmissioner HYDROSTATISKE TRANSMISSIONER...1 EGENSKABER...1 HYDROSTATISK TRANSMISSION...3 EFTERFYLDE...4 HOVEDSYSTEM...5 REGULERINGSSYSTEM...6
Undervisningsbeskrivelse
 Undervisningsbeskrivelse Stamoplysninger til brug ved prøver til gymnasiale uddannelser Termin Institution Uddannelse Fag og niveau Lærer(e) Hold Termin hvori undervisningen afsluttes: maj-juni 2012 Uddannelsescenter
Undervisningsbeskrivelse Stamoplysninger til brug ved prøver til gymnasiale uddannelser Termin Institution Uddannelse Fag og niveau Lærer(e) Hold Termin hvori undervisningen afsluttes: maj-juni 2012 Uddannelsescenter
Modellering og styring af mobile robotter
 Modellering og styring af mobile robotter Dina Friesel Kongens Lyngby 2007 IMM-PHD-2007-70 Technical University of Denmark Informatics and Mathematical Modelling Building 321, DK-2800 Kongens Lyngby, Denmark
Modellering og styring af mobile robotter Dina Friesel Kongens Lyngby 2007 IMM-PHD-2007-70 Technical University of Denmark Informatics and Mathematical Modelling Building 321, DK-2800 Kongens Lyngby, Denmark
Note om Laplace-transformationen
 Note om Laplace-transformationen Den harmoniske oscillator omskrevet til et ligningssystem I dette opgavesæt benyttes laplacetransformationen til at løse koblede differentialligninger. Fordelen ved at
Note om Laplace-transformationen Den harmoniske oscillator omskrevet til et ligningssystem I dette opgavesæt benyttes laplacetransformationen til at løse koblede differentialligninger. Fordelen ved at
Compact Trappelift. Brugsanvisning. Juni 04
 Brugsanvisning Compact Trappelift NEBA A/S - Baldersbuen 17 - Box 220 - DK-2640 Hedehusene - Telefon 46 59 01 77 Telefax 46 59 01 97 - e-mail: neba@neba.dk Juni 04 Brugsanvisning til Compact 2 Indholdsfortegnelse
Brugsanvisning Compact Trappelift NEBA A/S - Baldersbuen 17 - Box 220 - DK-2640 Hedehusene - Telefon 46 59 01 77 Telefax 46 59 01 97 - e-mail: neba@neba.dk Juni 04 Brugsanvisning til Compact 2 Indholdsfortegnelse
Fri vækstmodel t tid og P (t) kvantitet. dp dt = kp Løsninger P (t) = Ce kt C fastlægges ved en begyndelsesværdi. Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.
![Fri vækstmodel t tid og P (t) kvantitet. dp dt = kp Løsninger P (t) = Ce kt C fastlægges ved en begyndelsesværdi. Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.](/thumbs/56/38544107.jpg "Fri vækstmodel t tid og P (t) kvantitet. dp dt = kp Løsninger P (t) = Ce kt C fastlægges ved en begyndelsesværdi. Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.") Oversigt [S] 7., 7.2, 7.3, 7.4, 7.5 Nøgleord og begreber Vækstmodel Bevægelsesligninger Retningsfelt Separable ligninger Logistisk ligning Eksponentiel vækst Begyndelsesværdiproblem Calculus - 2006 Uge
Oversigt [S] 7., 7.2, 7.3, 7.4, 7.5 Nøgleord og begreber Vækstmodel Bevægelsesligninger Retningsfelt Separable ligninger Logistisk ligning Eksponentiel vækst Begyndelsesværdiproblem Calculus - 2006 Uge
Faglige delmål og slutmål i faget Matematik. Trin 1
 Faglige delmål og slutmål i faget Matematik. Trin 1 Faglige delmål for matematik i 1. og 2. klasse. Undervisningen skal lede frem mod, at eleverne efter 2. klasse har tilegnet sig kundskaber og færdigheder,
Faglige delmål og slutmål i faget Matematik. Trin 1 Faglige delmål for matematik i 1. og 2. klasse. Undervisningen skal lede frem mod, at eleverne efter 2. klasse har tilegnet sig kundskaber og færdigheder,
Installatør Guide. CTS6000 Webcontrol
 Installatør Guide CTS6000 Webcontrol Version 1.00, 30.06.2010 Indholdsfortegnelse Indholdsfortegnelse... 2 Figur oversigt... 3 Indledning... 4 Hurtigt i gang... 5 VAV med én tryktransmitter... 6 VAV med
Installatør Guide CTS6000 Webcontrol Version 1.00, 30.06.2010 Indholdsfortegnelse Indholdsfortegnelse... 2 Figur oversigt... 3 Indledning... 4 Hurtigt i gang... 5 VAV med én tryktransmitter... 6 VAV med
Statik og styrkelære
 Bukserobot Statik og styrkelære Refleksioner over hvilke styrkemæssige udfordringer en given last har på den valgte konstruktion. Hvilke ydre kræfter påvirker konstruktionen og hvor er de placeret Materialer
Bukserobot Statik og styrkelære Refleksioner over hvilke styrkemæssige udfordringer en given last har på den valgte konstruktion. Hvilke ydre kræfter påvirker konstruktionen og hvor er de placeret Materialer
3V 0 7V. (der mangler dokumentation for at det virker, men jeg mangler databladene for relæerne)
") Over transisteren skal der være en V BE på ca. 0 7V, for at transistoren opererer i sit linære område. Forsyningsspændingen er målt til ca. 3V, og da der går 0 7V over V BE, må der ligge 2 3V over modstanden.
Over transisteren skal der være en V BE på ca. 0 7V, for at transistoren opererer i sit linære område. Forsyningsspændingen er målt til ca. 3V, og da der går 0 7V over V BE, må der ligge 2 3V over modstanden.
Differentialligninger. Ib Michelsen
 Differentialligninger Ib Michelsen Ikast 203 2 Indholdsfortegnelse Indholdsfortegnelse Indholdsfortegnelse...2 Ligninger og løsninger...3 Indledning...3 Lineære differentialligninger af første orden...3
Differentialligninger Ib Michelsen Ikast 203 2 Indholdsfortegnelse Indholdsfortegnelse Indholdsfortegnelse...2 Ligninger og løsninger...3 Indledning...3 Lineære differentialligninger af første orden...3
PR 2000 Proximity-læser Art. Nr.: 460002 Installationsmanual
 PR 2000 Proximity-læser Art. Nr.: 460002 Installationsmanual PR2000v.2 Inst.Man. DANjun12 Side 2 CT 2000 Prox Indholdsfortegnelse Side 1. Generelt... 3 2. Programmering... 4 2.1 Programmering med ConLan
PR 2000 Proximity-læser Art. Nr.: 460002 Installationsmanual PR2000v.2 Inst.Man. DANjun12 Side 2 CT 2000 Prox Indholdsfortegnelse Side 1. Generelt... 3 2. Programmering... 4 2.1 Programmering med ConLan
Funktions-data Fabriksindstilling Variabel Indstilling
 eknisk datablad NR2A- Drejemotor til 2- og 3-vejs kugleventiler DN 1... 2 Moment 10 Nm Nominel spænding AC/DC 2 V Programmerbar, -Bus Konvertering af sensor signaler Styring: Modulerende DC 2... 10 V eller
eknisk datablad NR2A- Drejemotor til 2- og 3-vejs kugleventiler DN 1... 2 Moment 10 Nm Nominel spænding AC/DC 2 V Programmerbar, -Bus Konvertering af sensor signaler Styring: Modulerende DC 2... 10 V eller
Montørvejledning for DTC2100 Temperaturtyring - Version 1. Generel beskrivelse
 1 2 3 R DTC2100 Danotek Generel beskrivelse DTC2100 er udviklet til væskebaseret solfangersystemer, men kan også benyttes til anden temperatur styring med op til tre temperatur målinger og en relæudgang.
1 2 3 R DTC2100 Danotek Generel beskrivelse DTC2100 er udviklet til væskebaseret solfangersystemer, men kan også benyttes til anden temperatur styring med op til tre temperatur målinger og en relæudgang.
Danmarks Tekniske Universitet
 Danmarks Tekniske Universitet Side 1 af 10 sider Skriftlig prøve, lørdag den 23. maj, 2015 Kursus navn Fysik 1 Kursus nr. 10916 Varighed: 4 timer Tilladte hjælpemidler: Alle hjælpemidler tilladt "Vægtning":
Danmarks Tekniske Universitet Side 1 af 10 sider Skriftlig prøve, lørdag den 23. maj, 2015 Kursus navn Fysik 1 Kursus nr. 10916 Varighed: 4 timer Tilladte hjælpemidler: Alle hjælpemidler tilladt "Vægtning":
GU HHX MAJ 2009 MATEMATIK A. Onsdag den 13. maj 2009. Kl. 9.00 14.00 GL091-MAA. Undervisningsministeriet
 GU HHX MAJ 2009 MATEMATIK A Onsdag den 13. maj 2009 Kl. 9.00 14.00 Undervisningsministeriet GL091-MAA Matematik A Prøvens varighed er 5 timer. Alle hjælpemidler er tilladt. Af opgaverne 10A, 10B, 10C og
GU HHX MAJ 2009 MATEMATIK A Onsdag den 13. maj 2009 Kl. 9.00 14.00 Undervisningsministeriet GL091-MAA Matematik A Prøvens varighed er 5 timer. Alle hjælpemidler er tilladt. Af opgaverne 10A, 10B, 10C og