REG1 Øvelsesvejledninger og noter
|
|
|
- Emma Laugesen
- 7 år siden
- Visninger:
Transkript

1 Ingeniørhøjskolen i Århus Elektro- og IKT-afdelingen Mine rettelser indført d , CJ JNy rettelser indført den 5/7-05 REG1 Øvelsesvejledninger og noter Carl Jakobsen Jørgen Nybo Februar 2003 Rev. November 2006 T-493
2 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 2 Indholdsfortegnelse 0. Matlab øvelse 3 1. Modellering af Blackbox 9 2. Modellering af motor Optimering af Blackbox Optimering af positionsservo (lead) Optimering af Blackbox med digital regulator Optimering af positionsservo med digital regulator (lag) En kort introduktion til Agilent storageoscilloscope Dimensioneringsprocedure for Proportionalregulator Dimensioneringsprocedure for Lead- og Lag- regulator PID-regulatoren Stabilitet ud fra frekvenskarakteristikker 51
3 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 3 Matlab En introduktion til grundlæggende reguleringstekniske anvendelser. Gå ind i startmenuen. Under EIT-afd finder du iconen for Matlab: Klik på den! Dobbeltclik nu iconen på skrivebordet, og så er vi klar Matlab har en overvældende mængde manualer tilgængelige on-line, men jeg har alligevel valgt at indlægge en lille introduktion på dansk, så start med den Introduktion: Hvad er MatLab? MatLab står for MATrix LABoratory. Det er en softwarepakke specielt udviklet til numeriske beregninger og visualisering af data. Som navnet indikerer er MatLab udviklet til matrix regning, hvilket programmets struktur stadig bærer et vist præg af. MatLab er i dag et meget udbredt værktøj og anvendes særligt indenfor signalbehandling og reguleringsteknik MatLab har hundredvis af indbyggede funktioner til numeriske beregninger, grafik og animation, samtidig med at der er indbygget et højniveau programmeringssprog således, at det er enkelt at udvikle egne funktioner og rutiner. Herudover fås der en meget stor mængde af Toolboxe til Matlab, såvel kommercielle, som freeware tilgængelig på internettet (se Links siden). Opbygningen af Matlab og dets faciliteter fremgår af figuren herunder:

4 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 4 Brugerinterfacet i Matlab Matlab vil første gang du åbner det indeholde 4 vinduer: 1. Workspace, der viser de variable du i øjeblikket har inde i Matlab og kan arbejde med. 2. Current Directory, der virker som explorer og hvor du kan finde evt. gemte Matlab-filer, der altid har extension.m 3. Command History, hvor Matlab-ordrer du tidligere har brugt kan findes og genbruges. 4. Command Window, der er stedet hvor Matlab-kommandoerne skrives og eksekveres. Karakteristisk for dette vindue er MatLabs kommandoprompt ' >> ' Tag dig ikke af den omfattende "warning" der vises i starten. Er du træt af nogle af vinduerne, kan de bare lukkes, og hentes igen under view / desktop layout / Default Gå allerede nu ind under Help / Matlab Help i Toolbaren. Det er det sted du ofte vil vende tilbage til for at søge oplysning om brugen af Matlab. Det fuldstændige manualsæt ligger her. I denne omgang kigger du under MATLAB / Getting Started / Development Environment / Matlab Desktop og Desktop Tools Grafikvindue. Output fra alle grafikkommandoer du skriver i kommandovinduet generer et nyt vindue kaldet et figurvindue, som er et separat vindue. Brugeren kan generere lige så mange figurvinduer som system hukommelsen tillader. Se MATLAB / Getting Started / Graphics
5 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 5 Input-Output Datatyper Den grundlæggende datatype i Matlab er et array. Et array omfatter flere forskellige dataobjekter: integer, reelle tal, komplekse tal, matricer, karakterstrenge, strukturer og celler. I de fleste tilfælde behøver man ikke tænke meget over hvilken datastruktur man benytter, det finder Matlab ud af. For eksempel skal man ikke definere om en variabel er reel eller kompleks. Dimensionering Dette foregår også automatisk i Matlab, så man skal altså ikke definere størrelser på eksempelvis matricer og vektorer. Man finder dimensionerne af en eksisterende vektor eller matrix med kommandoerne size og length. Case sensitivitet Matlab er case sensitiv. Altså er a og A to forskellige variable. Det fleste kommandoer og indbyggede funktioner kaldes med små bogstaver. Kommando historie Matlab gemmer tidligere skrevne kommandoer i en buffer. Disse kommandoer kan genkaldes med 'pil op' tasten. Dette gør det nemmere at ændre tidligere kommandoer. Man kan også skrive de første karakterer i en kommando og derefter taste 'pil op'. Endelig er der Command History vinduet. Filtyper MatLab har 3 typer af filer hvor informationer gemmes: M-filer M.-filer er standard ASCII tekst filer, med ekstension.m til filnavnet. M-filer findes i to udgaver, nemlig script filer og funktions filer. Script filer er en samling af Matlab kommandoer samlet i en fil, der så kan eksekveres på en gang ved at kalde filnavnet. Funktions filer indeholder en funktion der kan have et antal in- og output parametre. Mere herom senere. Mat-filer Mat-filer er binære datafiler, med ekstension.mat til filnavnet. Mat-filer skabes af Matlab når man benytter save kommandoen til at gemme data. Dette filformat kan kun læses af Matlab. Data kan hentes ind i Matlab igen med kommandoen load. MEX-filer MEX-filer er Fortran eller C programmer der kan kaldes fra MatLab, de har ekstension.mex. Brugen af MEX-filer kræver nogen rutine i brugen af MatLab og vil ikke blive yderligere berørt i dette materiale.
6 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 6 Øvelsen Vores lærebog baserer også på Matlab og i alle kapitler findes opgaver til løsning i Matlab. Appendix B i lærebogen indeholder en masse eksempler på brugen, knyttet til de enkelte kapitler. Eksemplerne findes også på den medfølgende CD i biblioteket: D:\Toolbox\Appendix B Supplement\MATLAB Files for Appendix B Her på skolen er eksemplerne lagt på nettet, se adressen på Campus, så du ikke behøver CD'en. I Matlabs Current Directory -vindue skriver du stien, så kan Matlab finde eksemplerne. Skriv nu i kommandovinduet det eksempel du vil starte med: ch2p1 og straks vises resultatet af at køre denne script, og ved at sammenholde det med udskriften i bogen, kan du sammenligne årsag og virkning. Bedre er det imidlertid, at åbne ch2p1 i Editor/Debugger : I Current Directory vinduet åbnes mappen, hvor ch2p1 findes, og åbn den. Tilret vinduerne, så du har kommandovinduet og editor/debugger side om side øverst på skærmen, og denne side nederst. Der er nu flere måder at arbejde på: 1. I Editor/Debugger vælg Debug/run, og igen får du vist resultatet i kommandovinduet. 2. Marker nogle af ordrerne med musen, højre klik og vælg Evaluate Selection. 3. Marker hele indeholdet i ch2p1 (eller dele deraf) og brug copy/paste over i kommandovinduet. Jeg vil anbefale at du starter ud med 1). Det giver dig frihed til at skrive ændringer i eksemplerne og se virkningen. Hvis du vil gemme filen, se nedenfor under m-files. Er du i tvivl om en ordre, et tegn el.l. så skriv help efterfulgt af ordren. Start evt. med help help Afprøv nogle af eksemplerne ch2p1 til 8 (App. B i bogen), det vil give dig en ide om hvordan Matlab kan bruges, syntaks osv. Inden du går videre vil jeg lige nævne ordren save, (skriv "help save"), som kan være nyttig, hvis du vil gemme værdien af dine variable til næste gang. Gemmes i H : \ Matlab. Når du starter op igen skriver du så blot load Eksempel ch2p9 Introducerer flere forskellige måder at beskrive systemer på. MATLAB er et objekt-orienteret værktøj, og et system kan opfattes som et enkelt objekt, og beskrives ved en enkelt variabel: Skrives G=tf(num,den) vil G indeholde alle modelspecifikke data. Beskrives et nyt system ved H=tf(1,[1 1]) kan de serieforbindes med G *H, eller parallelforbindes med G+H. Denne skrivemåde vil ofte forenkle arbejdet. Du er ikke bundet til en tæller/nævner repræsentation, men kan konvertere til andre repræsentationer, (se evt. ch2p10+11). Vil du omvendt fra objektbeskrivelsen og til tæller/nævner, kan bruges f.x. ordren tfdata med følgende syntaks: [num,den]=tfdata(g,'v') I Help er der et afsnit om LTI-models, dvs. om overføringsfunktioners repræsentation. Control System Toolbox / Getting Started / Building Models / Linear Models eller: Control System Toolbox / Creating and Manipulating Models / Creating LTI Models
7 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 7 I det følgende vises lidt om tegning af grafer: Skriv: t = 0:0.5:10; y = sin(t);z = cos(t); plot(t,y,'o',t,z,'x') Efter ordren plot vil kurverne vise sig i et seperat fig.-vindue. Bemærk at ' : ' operatoren genererer en t-vektor med værdierne fra 0 til 10 i spring på 0.5. Er du i tvivl, så få t vist ved blot at skrive t. Brug "Arrow-up" tasten til at genfremkalde plotlinien igen. Ret linien til: plot(t, y, 'r') Skriv videre: hold on der sikrer at næste kurve ikke overskriver tidligere plot(t, z, '- g') hold off Og så er der brugen af mulighederne i selve grafikvinduet. I menulinien klik på pil-op (Edit plot) og højre klik igen på figuren, gå ind under properties Prøv også de andre menupunkter. Lav et nyt figure-vindue, (se Pull Down menuen), ellers erstatter nye plot det tidligere. subplot(2, 1, 1), plot(t, y, 'r') subplot(2, 1, 2), plot(t, z, '-.g') for sjov: afbild sinc-funktionen som en flade (ny figur), skriv: x = -8 : 0.5 : 8 ; y = x; [xx yy] = meshgrid(x, y); r = sqrt(xx.^2 + yy.^2) + eps; z = sin(r)./ r; surfc(xx, yy, z) Tryk f.x. på rotationstegnet Gennemgå Eksempel ch4p2 M-files: Ofte har du brug for at udføre de samme ordrer mange gange, og det kan da være bekvemt at samle disse ordrer i en script m-file eller en function m-file sådan som bogens forfatter har gjort. Se nærmere i online manualerne hvis du vil have detaljerne med. Vi vil her skrive en function M-file. Vi definerer to overføringsfinktioner G og H: G=tf(1,[1 2]) H=tf(1,[1 5]) Og vil nu have dannet lukketsløjfe-overføringsfunktionen M = G / (1+G H) idet H er tilbagekoblingen, og G sidder i fremadføringen. Det kan gøres med ordren: M=feedback(G,H) Men vi vil lave vores egen funktion med navnet lukkets, der skal gøre det samme. Gå op under File/New/m-file, og MATLAB Editor/Debugger åbner. Skriv nu de nødvendige ordrer ind som vist:

8 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 8 Efter af have gemt m-filen i H:\Matlab, kan du gå tilbage og skrive: help lukkets T=lukkets(G,H) (Får du en fejludskriften:??? Undefined function or variable lukkets hjælper det at gå ud af Matlab og ind igen, først da får den registreret den nye m-fil korekt. Det er vores installation der halter) Automatisk får du indbygget help til funktionen. Bemærk at vi nu får den med poler og nulpunkter, og at Matlab ikke har fået forkortet udtrykket. Derfor er feedback ordren stadig den bedste. Reduktion at T gøres ved at skrive: M=minreal(T) Har du lyst til at se hvordan Matlab har lavet feedback-ordren, kan du skrive: type feedback Prøv at omsætte T til et nævner og tæller polynomium. Et bodeplot (amplitude- og fase karakteristik) kan tegnes med ordren bode(g) osv., men nu er den indledende øvelse slut. Brug bogens eksempler til de enkelte afsnit for at komme videre på egen hånd. Der er til de enkelte kapitler nogle eksempler der viser brugen af relvante Matlabordrer. Simulink er slet ikke nævnt (bogens appendix C), men det er et herligt værktøj med en intuitiv grafisk brugerflade. Vil du igang med det, så start op med denne tutorial LTI Viewer er nyttig når vi skal analysere Bodeplot (bogens appendix D), men indgår ikke i REG1. Signal Pocessing Toolbox kan hjælpe dig med design af filtre, både digitale og analoge Og så det bedste, du kan låne Matlab installations-cd'en med hjem og kopiere det hele over til dit eget brug derhjemme, bare du sletter alt når du forlader IHA, og ikke anvender Matlab til andet end hvad der har med undervisningen her at gøre, henvend dig Help Desk, der administrerer CD'erne. I faget her har du brug for Matlab og Control System toolbox. (Simulink, Signalprocessing- og Filterdesign Toolbox kan du måske bruge i andre fag, men de øvrige er ikke relevante nu). Eksemplerne findes på den medfølgende CD i biblioteket: D:\Toolbox\Appendix B Supplement\MATLAB Files for Appendix B og for at de kan bruges i Matlab derhjemme, skal dette biblioteket stå i Matlabs søgesti således: Efter at have åbnet Matlab, vælg Files/Set Path. Nu åbner Path Browser, vælg Path/Add to Path, og du kan nu browse dig frem til mappen på CD en v.hj.a. knappen med de 3 prikker, vælg dernæst Add to back
9 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 9 Øvelse nr. 1: Modellering af Blackbox Øvelsesobjektet Øvelsesobjektet består af en Blackbox, der skal repræsentere en proces (se billedet nedenfor). Tillige er vist en Regulatorbox med P-I-D indstillinger hvori Blackbox en er monteret samt Storagescope (Agilent) og funktionsgenerator (Hameg) Blackbox Formål - At illustrere brugen af stepresponse og frekvenskarakteristikker til modellering. - Ved måling i laboratoriet, at få bestemt modellen for en "ukendt" proces: Blackbox'en - At indøve brugen af Matlab - At indøve brugen af samspillet mellem måling og simulering. - At illustrere begrebet stationær fejl. Øvelsen I får udleveret en øvelsesbox, hvor "processen" sidder sammen med en del andet, som skal bruges i de senere øvelse. Funktionen fremgår af forpladen, og i denne øvelse skal regulatorer o.l. bare stilles så der er gennemgang (P=1, I=D=off). Faktoren x10 efter blackbox'en hører med til processen. Tilbagekoblingssløjfen skal være åben / afbrudt og afbryd den indbyggede firkantgenerator. Processens overføringsfunktion T(s) = V u (s) / V i (s) kan bestemmes på flere måder. Den mest oplagte er måske identifikation ud fra et transientresponse, men også opmåling af amplitude og fasekarakteristik vil identificere systemet. Metoderne har hver sine fortrin, men den optimale løsning er brug af begge. Som udgangspunkt forventes modellen her, at kunne repræsenteres ved et 2.ordenssystem. Medbring evt. en diskette, idet det giver mulighed for at lagre scop-billeder til indsætning i et dokument.
10 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 10 Pas på at målingerne foretages under lineære forhold, dvs. uden at noget af det anvendte udstyr er gået i mætning. Regulatorbox en indikerer hvis mætning forekommer internt og generelt må der ikke forekome signaler større end ± 10V. 1. Stepresponse. Identificer procesmodellen G(s) ud fra et stepresponse. En firkantspænding tilsluttes referenceindgangen. (Husk at afbryde den indbyggede generator) Kun den største tidskonstant vil kunne bestemmes med sikkerhed. Hvordan får man en indikation af, at der er flere tidskonstanter? Bestem systemets DC-forstærkning og den største tidkonstant og dermed den ene pol. 2. Frekvenskarakteristikker. Identificer procesmodellen G(s) ud fra et antal målepunkter på amplitude- og fase- karakteristikken. Ud fra kendskabet til den ene pol kan et passende frekvenssweep planlægges. Bemærk at scopet kan måle fase (Quick Measurement). Husk ved udvælgelsen af målefrekvenser, at der i afbildningen anvendes logaritmisk frekvensakse og db-akse (logaritmisk papir, kan hentes på fagets hjemmeside). Forsøg nu at placere nogle rette linier der falder 20-, 40- eller 60- db/dekade (de asymptotiske karakteristikker), så du kan identificerer knækfrekvenserne. Korrekt identifikation kan kun gøres ved samtidig at kigge på fasekarakteristikken og også der indlægge de asymptotiske karakteristikker. 3. Luk tilbagekoblingssløjfen, sæt V i = 1V, og mål den stationære fejl e( ) = V i -V u ( P=1, I = D = off). Passer værdien med den teoretiske? 4. Foretag nu en simulering af den fremkomne model i MATLAB, for at se om stepresponse og Bode-plot passer med det målte. Find så et passende model-kompromis, som I mener er relevant. 5. Simuler et stepresponse når blackbox en indgår i en lukket sløjfe med enhedstilbagekobling som i spm.3. Denne model benyttes herefter i de følgende øvelser. Forberedelse: Uden kendskab til processens model, G(s), antages det oftest, at systemet indeholder 1-2 dominerende poler, der med tilstrækkelig nøjagtighed beskriver systemets dynamik. I det følgende betragtes et 1.ordenssystem, et 2.ordenssystem med reelle poler samt et 2.ordenssystem med komplekse poler. 1. Karakteriser hvordan stepresponset adskiller sig for disse forskellige systemer, ved at beskrive sammenhængen mellem poler og dominerende tidskonstanter i stepresponset. 2. Karakteriser hvorledes Bodeplottet adskiller sig for disse systemer. 3. Hvordan måles stepresponse, amplitude- og fasekarakteristik på et scope. Jvf. lærebogens afsnit og , eller tilsvarende anden litteratur.
11 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 11 Supplerende spørgsmål: Det antages at systemets model er: G ( s) = ( s+ 50)( s+ 1000) og indgår i nedenstående tilbagekoblede system. F1(s) R(s) C(s) F2(s) 1. Bestem systemets stationære fejl overfor step- og rampe input, idet F1(s) = F2(s) = 0 og G1(s) = 1 2. Hvorledes kan G1(s) udformes, så fejlene reduceres 3. Hvorledes påvirker en forstyrrelse F1(s) eller F2(s) systemets fejl 4. G(s) tænkes sammen med en forstærkning på 10, at indgå i et enhedstilbagekoblet system, der da får lukketsløjfe overføringsfunktionen T(s). Bestem T s følsomhed overfor fejl i G ( S T:G ). Idet DC-forstærkningen i G(s) tænkes behæftet med 25% fejl, bestem da den relative ændring i udgangsværdien C(s) s stationære værdi.

12 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 12
 13 Øvelse nr 2: Modellering af motor Øvelsesobjektet Øvelsesobjektet består af en færdigmonteret motorstand (se billedet): Motor, tachometer, gear og ekstra inertibelastning er monteret samlet,")
13 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 13 Øvelse nr 2: Modellering af motor Øvelsesobjektet Øvelsesobjektet består af en færdigmonteret motorstand (se billedet): Motor, tachometer, gear og ekstra inertibelastning er monteret samlet, og udgør reguleringsobjektet. Tillige bruges et storagescope (Agilent), funktionsgenerator (Hameg), Effekttrin for DC-motor og multimeter. Formål - At underbygge forståelsen fra lærebogens gennemgang af motormodellen - Ud fra motorens model, at arbejde med blokdiagrammer. - Ved måling i laboratoriet, at få bestemt modellen for en DC-motor med belastning. Ved direkte at måle de enkelte parametre i motorens model, ud fra et stepresponse og ved hjælp af frekvenseresponse (Bodeplot) - At indøve brugen af Matlab - At indøve brugen af samspillet mellem teori, måling og simulering.
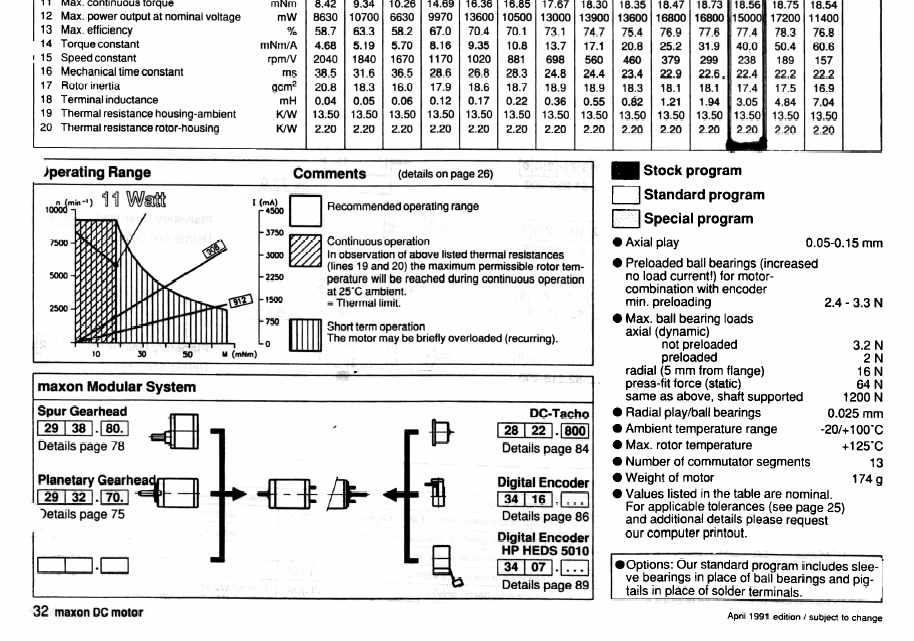
14 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 14 Øvelsen I får udleveret den færdigmonteret motorstand (se billedet), der består af: DC-motoren af typen: Maxon , datablad vedlagt. Den anvendte gearing er på N last / N motor = θ L / θ m = N 2 / N 1 = 1:27 Direkte på motorakslen er påmonteret et tachometer, der afgiver en tilnærmet jævnspænding proportional med omdrejningstallet. Type: Maxon , datablad vedlagt. I denne 1.del tilsluttes potentiometeret til vinkelmåling ikke, fjern sammenkoblingen ved at skubbe plastslange-koblingen af. Medbring evt. en diskette, idet det giver mulighed for at lagre scop-billeder til indsætning i et dokument. Opgaven er nu at identificere motorstandens parametre Pas på at målingerne er taget under lineære forhold, dvs. uden at noget af det anvendte udstyr er gået i mætning. 1. Mål motorens ankermodstand, R a, ved en strøm spændingsmåling og med rotoren fastholdt i forskellige stillinger. Målingen foretages ved max. Kontinuert strøm. Hvorfor virker denne måling ikke når motoren kører? 2. Indstil ankerspænding til E a = 10 V. Mål sluthastigheden ved med et stopur, at bestemme den langsomtgående aksels omdrejningstal. Sæt evt. en kabelbinder om akslen for bedre at følge omdrejningstallet. Sammenlign værdien med tachometerets værdi. Mål ankerstrømmen I a Ved at indsætte i de stationære ligninger, kan K b = K t beregnes. D s, der udtrykker væskefriktionskoefficienten for motorstanden, beregnes ved at antage, at væskefriktion er den eneste belastning, så det udviklede moment T m = K t I a = D s ω 3. Bestem motorstandens overføringsfunktion G ωs (s) ved at optage et passende stepresponse, f.x. med E a = 10 V. Brug storagescope, effektforstærker og firkantgenerator til målingerne. Bestem K ms, α ms og τ ms for motorstanden. Bestem derefter inertimomentet J s ud fra τ ms s definition i lign.(2-153) 4. For at undersøge om K ms og α ms er korrekte, identificeres 3dB-punktet på en amplitude- og fasekarakteristik ved brug af funktionsgenerator, effektforstærker og storagescope. Bemærk at at scopet kan måle fase (Quick Measurement). Den fremkomne model bruges i en MATLAB-simulering, hvor stepresponse og frekvenskarakteristikker beregnes. Resultaterne sammenlignes, og fastlæg et passende modelkompromis, som I mener repræsenterer opstillingen. Denne model benyttes herefter i de følgende øvelser.
15 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 15 Generelt om motoren Jvf. lærebogens gennemgang af motorens model. Når motoren er i sin stationære tilstand, dvs. hverken under opstart eller nedbremsning gælder følgende 2 stationære ligninger: E a = R a I a + K b ω T m = K t I a Dynamisk gælder ligning (2.153) og nedenfor er vist et blokdiagram svarende til denne model ( L a = 0 ): E a ω θ Ofte udelades den sidste integrationsblok, og motoren betragtes som en hastighedsgiver med overføringsfunktionen: ω( s) K m Kvm 1 Gω ( s) = = = hvor α m = Ea ( s) s + α m 1+ τ ms τ m og τ m Forberedelse: er motortidskonstanten 1. Bestem overføringsfunktionen: G ω (s) ω(s) samt G (s) = E (s) = θ a θ(s) E (s) a ud fra blokdiagrammet ovenfor, og sammenlign med bogens udtryk. 2. I øvelsen anvendes en DC-motoren af typen: Maxon , (datablad udleveres). Bestem blokdiagrammets parametre i SI-enheder ud fra databladets punkt: 2, 3, 6, 8, 14 og 17 Væskefriktionskoefficienten D bestemmes ud fra pkt , idet det forudsættes at noload betyder, at kun motorens egen væskefriktion er tilstede, og data gælder ved nominel spænding. (Brug de to stationære ligninger).
16 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) s + 45,6 rad 3. Vis at G ( s) = [ ] ω 4. Hvorledes genfindes værdierne i G ω (s) i et stepresponse. Vs Supplerende spørgsmål: 1. Såfremt motorakslen belastes med et inertimoment J b og en væskefriktion på D b gennem en gearing på: N last / N motor = θ L / θ m = N 2 / N 1 = 1:27, hvilke parametre vil da ændres og hvor meget. 2. Kan blokdiagrammet ændres, så afgreningen der går til K b tages ud lige efter K t -blokken? 3. Tegn blokdiagrammet om, så udgangen af Kb-blokken går til det midterste sumpunkt og afgreningen til D-blokken hentes fra θ. 4. Hvordan ændres motorens blokdiagram hvis selvinduktion, L a, tages med? 5. Tegn blokdiagrammet med signalgrafer.

17 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 17

18 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 18
19 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 19 Øvelse nr. 3: Optimering af Blackbox (PID) Øvelsesobjektet Øvelsesobjektet består af den Blackbox, hvis model blev udmålt i en tidligere øvelse. Tillige benyttes en Regulatorbox med P-I-D indstillinger, samt Storagescope (Agilent) og funktionsgenerator (Hameg) Formål: at opbygge et reguleringssystem, hvor Blackbox en indgår i en lukket sløjfe. ud fra givne dynamiske og statiske systemkrav, at dimensionere en P-, en PD- og en PIregulator. i laboratoriet at afprøve virkningen af en P-, en PD- og en PI- regulator. Øvelsen Blackbox en indsættes i den lukkede sløjfe. Opbygget med den regulatorbox, der blev anvendt ved modelleringen. Det er muligt at indstille forskellige korrektionsnetværk af typen PID (PI-Lead). Blokkene DRIVER og SENSOR sættes til x1. Faktoren x10 efter blackbox en hører med til processen. Systemoversigt: Ref. + - PID- Regulator Blackbox En firkantspænding, ±20 mv, 5HZ, tilsluttes referenceindgangen. (Husk at afbryde den indbyggede generator). Tilsluttes også et storagescope, vil der ikke være behov for yderligere instrumenter. (Evt. måles den stationære fejl bedst med DC ind, og et multimeter.) Tiderne der er angivet på I- og D- leddet er 10 gange mindre end angivet. Medbring evt. en diskette, idet det giver mulighed for at lagre scope-billeder til indsætning i et dokument.
20 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 20 Vigtigt! Teorien gælder kun så længe ingen af enhederne overstyres, hold øje med mætnings- dioderne. 1. P-regulator. (PI og PD slået fra) a. Juster åbensløjfe forstærkningen med Kp, og beskriv hvorledes den stationære fejl, oversvinget og opvoksningstiden påvirkes. Følg med i Bodeplottet for at forklare hvad der sker. b. Indstil den Kp -værdi, der giver ca. 5% oversving, og bestem systemets stationære fejl og opvoksningstiden. Sammenlign med simuleringsresultaterne. c. Indstil Kp så oversvinget er ca. 30% og bestem systemets stationære fejl og opvoksningstiden. Sammenlign med simuleringsresultaterne. 2. PD-regulator. (PI slået fra) a. Indstil nu værdierne Kp, T D og T L svarende til den beregnede Lead-regulator. Iagttag om oversvinget er reduceret til ca. 5%. Finjuster evt. T L m.fl. og overvej hvorledes det ændrer Lead-regulatorens egenskaber. De to 10-turns potentiometre kan indstilles så T D går fra 0 til 10 ms og T L går fra 0 til 1 ms. b. Bestem systemets stationære fejl og opvoksningstiden. 3. PI-regulatoren. (PD slået fra) a. Indstil K p så oversvinget er ca. 5%. b. Indstil PI-regulatoren så den stationære fejl fjernes uden at oversvingets størrelse ændres. 10-turns potentiometeret kan indstilles så T I går fra 0 til 100 ms. c. Er der nogen ændring af stepresponset i forhold til P-regulatoren. 4. PID-regulatoren. a. Kobel nu både I- og D leddet ind samtidigt så godt det nu lader sig gøre med en fælles K p faktor og forklar stepresponset. b. Forsøg derudfra at optimere systemet til 5% oversving og mindst mulig opvoksningstid, men pas på der ikke optræder mætning. Noter indstillingerne.
21 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 21 Forberedelse: I en tidligere øvelse, er udmålt en model for Blackbox-processen. Der vil naturligvis være forskel på resultaterne, men fremover benyttes: G ( s) = ( s+ 50) ( s+ 1000) 1. Matlab beregninger: a) Afbild systemets amplitude- og fase karakteristik. Skal bruges ved dimensioneringen af de forskellige regulatorer. (4-5 kopier). b) Bestem ved simulering den Kp-værdi, der giver 5% oversving for et stepinput, og bestem systemets stationære fejl og opvoksningstiden T r. Indtegn virkningen i et bodeplot. Bestem ω φm og φ m og sammenlign med de designregler vi normalt benytter. c) Gentag b), men nu til 30% oversving. Dimensioner nu en Lead-regulator, der reducerer oversvinget til 5% med samme ω φm. Bestem systemets stationære fejl og opvoksningstiden. Eftervis resultatet i Matlab. d) Med udgangspunkt i situationen fra b) skal dimensioneres en PI-regulator således at den stationære fejl fjernes uden at oversvingets størrelse ændres. 2. PID-regulatoren: Den PID-regulator der kan realiseres i øvelsen har følgende opbygning: M(s) = K Vis at PD-delens overføringsfunktion K p p 1 TD s TI s TL s + 1 TD s 1 + TL s + 1 svarer til en Lead-regulator når det forudsættes at T L << T D.
22 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 22 Øvelse nr. 4: Optimering af positionsservo (Lead) Øvelsesobjektet Øvelsesobjektet består af den færdigmonterede motorstand fra modelleringsøvelsen: Motor, tachometer, gear, ekstra inertibelastning og nu også potentiometeret til måling af vinkeldrejning er monteret samlet, og udgør reguleringsobjektet. Tillige bruges et storagescope (Agilent), funktionsgenerator (Hameg), Effekttrin for DC-motor og en standardbox hvor Lead/Lag parametre kan realiseres Formål at opbygge et positions reguleringssystem (positionsservo). ud fra givne dynamiske og statiske systemkrav, at dimensionere en Proportional-, og en Leadregulator. i laboratoriet at afprøve virkningen af en Proportional-, og en Lead regulator realiseret analogt. simulering i Matlab Øvelsen Reguleringobjektet er motorstanden, der tidligere er modelleret og hvis data typisk er: R a 21 ohm D Nms K t = K b Nm/A, V/s K m 635 V -1 J kgm 2 τ m 39 ms Den anvendte gearing er på N last / N motor = θ L / θ m = N 2 / N 1 = 1:27 Direkte på motorakslen tilsluttes et 10-turns-potentiometer til vinkelmåling, skub plastslangekoblingen ind over akslen. Over potentiometeret lægges ±1V. Udtaget (gul) giver altså -1V for potentiometeret drejet helt til den ene side, og +1V for akslen drejet 10 omgange til den modsatte side. Dertil kommer en standardbox, hvorpå regulatorindstillingerne kan gøres. Medbring evt. en diskette, idet det giver mulighed for at lagre scope-billeder til indsætning i et dokument.
23 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 23 Systemoversigt: Ref. + - Regulator G c(s) Forstærker K F Motor, gear belastning m.m. Potentiometer K pot 10 Regulatoren G c (s), summationspunktet, 10 ganges forstærkning og tilbagekoblingen realiseres ved hjælp af en stadardbox, hvis opbygning ses nedenfor: G c(s) x 10 x 1 Processen i figuren ovenfor er nu forstærker og motoropstilling med potentiometer (indrammet i systemoversigten). De indsættes v.hj.a. BNC-stik på standardbox ens bagside. Der kan opbygges forskellige korrektionsnetværk af typen Lead eller Lag, og så naturligvis en ren forstærkning. De forskellige regulatortyper dimensioneres ved at bestemme størrelsen af de kondensatorer, der indsættes ved "A" og "B" I soklen er de 4 huller til venstre = A, de midterste 4 = fællespkt., og de 4 til højre = B.
24 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 24 Vigtigt! Teorien gælder kun så længe ingen af enhederne overstyres. Kontroller specielt effekttrinnet ved alle målinger, udgangssignalet må ikke overstige ±20V. 1. Sæt Gain = 1, ingen Lead/Lag virkning og K F =20. Sæt systemet sammen til en positionsservo, f.x. med referencen, Vin = 0V. Prøv manuelt at dreje motoren lidt, så vil du se, at positionen kan være både lidt over og under referencen. Slå Gain over på x 10 og se at afvigelsen nu er meget mindre. Grunden er startfriktion i lejer o.l. ( coulomb- og stiktion friktion ). Det vil svare til en forstyrrelse. Brug funktionsgeneratoren indstillet til firkanter, ±200mV og 0,5 Hz som reference. Iagttag positionens opvoksningstid, oversving og stationære fejl, for forskellige værdier af Gain. Øg forstærk-ningen og se om systemet bliver ustabilt. 2. Indstil forstærkningen så der netop ikke er noget oversving. Lav målinger og sammenlign med resultatet fra simuleringen. 3. Forøg forstærkningen med 5 og mål oversvinget. Sammenlign med resultatet fra simuleringen. Kontroller, at der ikke sker overstyring i systemet. 4. Realiser den Lead-regulator du har dimensioneret under forberedelsen. Lav målinger og sammenlign med resultatet fra simuleringen. Sammenlign også med resultaerne fra pkt 2. uden lead regulator. Hvilke forbedringer er der opnået? 5. Et type 1 system vil have en stationær fejl fra 0 for rampeinput. Afprøv dette ved at tilføre en trekantkurve, der går ± 6V med frekvensen ca. 0,05 Hz. Gain =2 og K F = 2. Registrer nu den stationære fejl på et storagescop. Sammenlign målinger med beregninger Forøg forstærkningen til Gain =10 og iagttag at fejlen er blevet mindre.
25 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 25 Forberedelse: Åbensløjfe overføringsfunktionen for det samlede system er: G c (s) K F G ω (s) 1 s 1 N K pot 10 G ω (s) = 635 / (s+26); K pot = 0,032 [V/rad]; N = 27; K F = Idet G c (s) er en konstant, K C, ønskes den største værdi fundet, for hvilken systemet ikke har noget oversving ( < 1% ). Brug Matlab. Iagttag opvoksningstid, oversving og stationære fejl. 2. Plot for denne K C -værdi amplitude- og fasekarakteristik, og find den tilhørende fasemargin, φ m og fasemarginsfrekvens, ω φm. Brug Matlab. 3. Beregn ud fra Bodeplottet hvilket oversving der kan forventes hvis K C forøges med 5 gange. Find det tilhørende φ m og ω φm. Indtegn situationen i et Bodeplot og kontroller med et stepresponse. Brug Matlab. Iagttag opvoksningstid, oversving og stationære fejl. 4. Dimensioner en Lead-regulator så systemet er uden uden oversving, og med samme fasemarginsfrekvens som i pkt.3. Indtegn situationen i et Bodeplot og kontroller med et stepresponse. Brug Matlab. Iagttag opvoksningstid, oversving og stationære fejl. 5. Systemet er et type 1, og vil have en stationær fejl fra 0 for rampeinput. Idet referencen er en trekantkurve, der går ±6V med frekvensen 0,05 Hz, K C =2 og K F = 2, ønskes den staionære fejl, e( ), beregnet. I øvelsens praktiske del realiseres Lead - regulatoren med følgende kredsløb: Beregn overføringsfunktionen for den viste kobling. R1 og R2 er indbygget med værdien 500 kω Beregn C1 og C2 for Lead - regulatoren dimensioneret ovenfor.


26 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 26 Øvelse 5: Optimering af Blackbox med digital regulator. 1. Øvelsesobjekt Øvelsesobjektet består af den Blackbox, der skal repræsentere en proces. På billedet er vist en Regulatorbox med P-I-D indstillinger hvori Blackbox en er monteret samt Storagescope (Agilent), funktionsgenerator (Hameg) og multimeter Tillige anvendes et Ez-Kit-Lite til realisering af den digitale regulator. Kit et er forsynet med et konvertermodul, så 10Vp.p signalniveauer kan behandles. Billedet viser opkoblingen. 2. Formål Formålet med øvelsen er: $ At underbygge forståelsen af bogens gennemgang af digital regulering $ At få kendskab til, hvorledes en analog regulator kan realiseres digitalt (bilineær transformation). $ At få kendskab til, hvorledes tidsforsinkelser influerer på reguleringssystemer. $ At få kendskab til, hvorledes valg af samplingfrekvens påvirker reguleringssystemer. $ at indøve brugen af Matlab på tidsdiskrete (digitale) reguleringssystemer. $ At få forståelse af samspillet mellem teori, simulering og måling.
27 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) Øvelsen. Vigtigt! Teorien gælder kun så længe ingen af enhederne overstyres. Hold øje med overstyringsindikatorerne på reguleringsboksen. 1. Undersøg, hvilken indflydelse tidsforsinkelsen Td (se Ez-Kit-Lite) har på processen, ved at anvende den oprindelige analoge proportionalregulator (OS=30%, K=42, ω φm =1300 s -1 ) med EZ_Kit_Lite indskudt i processen. Indsæt Ez-Kit-Lite umiddelbart foran Blackbox en. Få opstillingen til at virke inden Ez-Kit-Lite indsættes. 2. Afprøv den i forberedelsen dimensionerede digitale PD-regulator med den laveste samplingfrekvens. 4. Forberedelse. 1. Med udgangspunkt i den analoge proportionalregulator (OS=30%, K=42, ω φm =1300 s -1 ) undersøges det, hvilken indflydelse fasedrejningen forårsaget af tidsforsinkelsen Td (i DSP en) har på systemet. Beregn fasebidraget og sammenlign med åbensløjfe overføringsfunktionens frekvenskarakteristikker. 2. Design en analoge PD(lead)- regulator, således at der kompensere for tidsforsinkelsen, idet der fortsat ønskes en fasemarginsfrekvens på ca.1300 rad/s og et oversving på 30%. 3. Beregn den digitale PD(lead)-regulator ved en bilineær transformation (Matlab/ Tustin)af den i spm.2 beregnede analoge regulator. Bestem ligeledes impulsoverføringsfunktionen G 0 (z) = Z[G h (s)g p (s)] (Matlab/ ZOH ) idet tidsforsinkelsen medregnes i processen G p (s) (Matlab/ PADE ). Beregn overføringsfunktionerne for den lavest anbefalede samplingsfrekvens (kap 13.10)samt for en 10 gange højere samplingfrekvens. 4. For ovenstående regulatorer simuleres lukketsløjfesystemets steprespons i Matlab for begge samplingfrekvenser. Kommenter resultaterne i forhold til anbefalingerne i kap Undersøg stepsvaret på både process -indgang (f) og -udgang (c). 5. Konverter regulatorens koefficienter til hexadecimal 1.15 format, så koefficienterne kan indlæses i DSP en (se afsnit Ez-Kit-Lite). Det er kun relevant at konvertere koefficienterne til den lave samplingfrekvens. Forklar hvorfor? 5. Eksamensrelevante spørgsmål. Der kan stilles uddybende spørgsmål indenfor det pensum, der er dækket af lærebogens kap samt kap og 10, med sidetal som anført i lektionsplanen.der henvises specielt til opgaverne: Exercise 13.3, Exercise 13.9, og øvelsesopgave 13.6
28 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) Ez-Kit-Lite. EZ_Kit_Lite anvender en en-bits delta-sigma-konverter (CODEC), der i modsætning til andre AD/DAkonvertere har en forholdsmæssig stor tidsforsinkelse (delay). Når CODEC en som her er fast indstillet til, at sample med 48khz, er denne tidsforsinkelse Td = 0.8ms. Sammen med EZ_Kit_Lite anvendes et konvertermodul, der konverterer EZ_Kit_Lite kortets 1Vrms signalniveauer til +/-10V niveauer. Der er lavet et program til EZ_Kit_Lite der realiserer et 2.ordens IIR-filter på kanonisk form (se bilag1), hvor tæller og nævner koefficienter (coefa/coefb i fractional mode hex) kan indlæses og samplingtiden T kan vælges, ved at neddele CODEC=ens 48khz samplingfrekvens (T = N/48 khz). De nødvendige programmer ligger på IHA-drev (oplyses af vejleder)/ Campusnet, hvorfra filer kopieres til h-drev=et (h:\reg1\dsp). Regulatoren programmeres på følgende måde: 1. Indlæs konstanter i regulatoralgoritmen kanonisk.dsp med en teksteditor (notepad). Se markering i bilag Samplingtiden bestemmes, ved at indlæse N i slutningen af modul isr.dsp. Se markering i bilag Åben et dos.vindue ved at click e på GO-DSP og oversæt programmodulerne i folderen kanonisk med bat-filen ovs.bat med parameteren kanonisk (ovs kanonisk). Herved placeres de oversatte filer i h:\reg1\dsp\kanonisk 4. Tilslut EZ_Kit_Lite til port 1 med det serielle kabel. Installer Ez_kit_Lite programmet fra Control Panel og åben programmet med ikonet på desk toppen. Vælg eventuelt seriel port under optioner/settings, hvis der ikke er kontakt med kittet. 5. Programmet kanonisk.exe kan nu downloades til EZ_Kit_Lite efter reset. 6. Konvertermodul tilsluttes EZ_Kit_Lite med probe (bemærk pin 1 skal vende frem mod IC=en med den hvide ettiket). 7. EZ_Kit_Lite kan nu indskydes i processen med BNC stikkene på konvertermodulet. Programmet anvender højre kanal på konverteren. 8. EZ_Kit_Lite kopierer de analoge indgange til udgangene efter reset, når promttiden er gået (ca. 5 sek.), uden at der er loaded brugerprogrammer.
29 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 29 Implementering af digital regulator: 1. Bestem k*d(z), på grundlag af D(s), således at D(z)= D(1)~1 (gælder for lead regulatorer). Det gælder dog at koefficienterne i D(z) numerisk skal være mindre end 1. Forstærkning/dæmpning k, udføres analogt. 2. Konverter koefficienterne i D(z) fra decimale fortegnstal til binær/hex tal i fractional mode (1.15 format). 3. Bestem N= 48000*T. (se DSP-source kode isr.dsp) 4. Programmer regulatoren.(koefficienter indlæses i hex format i source kode kanonisk.dsp).
30 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 30 Bilag 1 1 U() z b0 + bz 1 + b2z Dz () = = 1 Ez () 1+ az + az U() z Fz () = Fz () Ez () U() z = b0 + bz 1 + b2z U() z = b0f() z + b1f() z z + b2 F() z z Fz () Fz () = 1 2 Fz () = Ez () afz 1 () z a2f( z) z Ez () 1+ az + az E0 E() z e() n 1 2 F0 Fz () f(), n F1 Fzz () f( n 1), F2 Fzz () f( n 2) U0 U() z u() n E0 - D1 F0 b 0 D2 U0 Z -1 a 1 F1 b 1 Z -1 a 2 F2 b 2 D1=a1*F1+a2*F2 D2=b1*F1+b2*F2 (vent på samplingtidspunkt) Indlæs (E0) F0=E0-D1 U0=b0*F0+D2 Udlæs (U0) F2=F1 F1=F0 Beregningstidsforsinkelsen er 2 multiplikationer og 1 addition
31 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 31 Bilag2 {************************************************************************** * * This module contains interrupt service routine * **************************************************************************}.module/abs=0 interrupt_service_rutines; {Include files/variables}.external start; {include start in isr-module}.external init_cmds; {include init_cmds from sysinit}.external init_cmds_flag; {include status-variable of } {init_cmds buffer}.external kanonisk_2; {2.order digital filter}.external N; {Variabel declarations}.var/dm/ram/circ rx_buf[3]; {Receive buffer}.global rx_buf; {Status + L data + R data}.var/dm/ram/circ tx_buf[3]; {Transmit buffer}.global tx_buf; {Cmd + L data + R data}.init tx_buf: 0xc000, 0x0000, 0x0000; {Initially set MCE} {************************************************************************* * Interrupt vector table starts here *************************************************************************} jump start; rti; rti; rti; {00: reset } rti; rti; rti; rti; {04: IRQ2 } rti; rti; rti; rti; {08: IRQL1 } rti; rti; rti; rti; {0c: IRQL0 } ar = dm(init_cmds_flag); {10: SPORT0 tx } ar = pass ar; if eq rti; jump isr_tx_next_cmd; jump isr_rx; {14: SPORT0 rx } rti; rti; rti; rti; rti; rti; rti; {18: IRQE } rti; rti; rti; rti; {1c: BDMA } rti; rti; rti; rti; {20: SPORT1 tx or IRQ1 } rti; rti; rti; rti; {24: SPORT1 rx or IRQ0 } rti; rti; rti; rti; {28: timer } rti; rti; rti; rti; {2c: power down } { Interrupt vector table end } Isr.dsp {************************************************************************** * Transmit interrrupt service rutine, used for Codec initialization * * Calling parametres: * i3 -> init_cmds[*] * l3 = %init_cmds * m1 = 1
32 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 32 * Return value * init_cmds_flag * Altered Registers * Using secondary registers * ax0, ay0, ar * i3 **************************************************************************} isr_tx_next_cmd: ena sec_reg; ax0 = dm (i3, m1); { fetch next control word and } dm (tx_buf) = ax0; { place in transmit slot 0 } ax0 = i3; ay0 = ^init_cmds; ar = ax0 - ay0; if gt rti; { rti if more control words still waiting } ax0 = 0xaf00; { else set done flag and } dm (tx_buf) = ax0; { remove MCE if done initialization } ax0 = 0; dm (init_cmds_flag) = ax0; { reset status flag } rti; {************************************************************************** * Receive interrrupt service rutine, used for I/O from/to Codec * * Calling parametres: * none * Return value * none * Altered Registers * si **************************************************************************} isr_rx: {Call 2.order filter at T=1/48000*N} AX0=DM(N); AR=AX0-1; DM(N)=AR; IF NE JUMP EXIT; si = dm(rx_buf+2); {get right channel (input)} { } CALL kanonisk_2; {do filter} AX0=20736; {start new T-period} DM(N)=AX0; {select N for wanted samplinperiod T} {T=N/48000} { } dm(tx_buf+2) = si; {put in right channel (output)} EXIT: rti;.endmod;
33 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 33.MODULE kanonisk; {************************************************************************** * * This module contains 2. order digital filter direct form 2. * * -1-2 * U(Z) b0 + b1 * z + b2 * z * D(z)= = * E(Z) -1-2 * 1 + a1 * z + a2 * z * * /JNy **************************************************************************} {Include files/variables} {Variabel declarations}.var/dm/ram dummy1; {}.var/dm/ram dummy2; {}.var/dm/ram F[3]; {Feed back delay}.var/dm/ram coefa[3]; {}.var/dm/ram coefb[3]; {}.init F: 0,0,0;.init coefa: 0x7FFF, 0x8286, 0x0000;.init coefb: 0x7fff, 0x8c1f, 0x0000; {a0=1(always), a1=0, a2=0} {b0=1,0, b1=0, b2=0}.entry kanonisk_2; {start label is global} {*************************************************************************} kanonisk_2: AX0=DM(dummy1); AY0=SI; AR=AY0-AX0; DM(F)=AR; {F0=E0-dummy1} MX0=DM(coefB); MY0=DM(F); MR1=DM(dummy2); MR=MR+MX0*MY0(RND); {U0=B0*F0+dummy2} SI=MR1; {output U0} AX0=DM(F+1); DM(F+2)=AX0; AX0=DM(F); DM(F+1)=AX0; MX0=DM(F+1); MY0=DM(coefA+1); MR=MX0*MY0(SS); MX0=DM(F+2); MY0=DM(coefA+2); MR=MR+MX0*MY0(RND); DM(dummy1)=MR1; MX0=DM(F+1); MY0=DM(coefB+1); MR=MX0*MY0(SS); MX0=DM(F+2); MY0=DM(coefB+2); MR=MR+MX0*MY0(RND); {F2=F1} {F1=F0} {calculate dummy1} {calculate dummy2}
34 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 34 DM(dummy2)=MR1; RTS; {**************************************************************************}.endmod;

, funktionsgenerator (Hameg), Effekttrin for DC-motor og en standardbox hvortil kan tilsluttes et Ez-Kit-Lite til realisering af den digitale regulator.")
35 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) 35 Øvelse 6: Optimering af Positionsservo med digital Lag- regulator. 1. Øvelsesobjekt Øvelsesobjektet består af den færdigmonterede motorstand fra modelleringsøvelsen: Motor, tachometer, gear, ekstra inertibelastning og nu også potentiometeret til måling af vinkeldrejning er monteret samlet, og udgør reguleringsobjektet. Tillige bruges et storagescope (Agilent), funktionsgenerator (Hameg), Effekttrin for DC-motor og en standardbox hvortil kan tilsluttes et Ez-Kit-Lite til realisering af den digitale regulator. Kit=et er forsynet med et konvertermodul, så 10Vp.p signalniveauer kan behandles(se billede). Følgende overføringsfunktioner for lag-regulator og motorstand, anvendes i det efterfølgen de. Systemet har en fasemarginsfrekvens som anført: s + 023, Regulator: Gc () s = 2 ; s , 15 Regiuleringsobjekt: Gs () = (for: K F motorstand / potm = 1V) ss ( + ) ; = 2, ± 26 ω ϕ m = 1,16s -1
36 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) Formål. Formålet med øvelsen er: $ At underbygge forståelsen af bogens gennemgang af digital regulering $ At få kendskab til, hvorledes en analog regulator kan realiseres digitalt (bilineær transformation). $ At få kendskab til, hvorledes tidsforsinkelser influerer på reguleringssystemer. $ At få kendskab til, hvorledes valg af samplingfrekvens påvirker reguleringssystemer. $ At indøve brugen af Matlab på tidsdiskrete (digitale) reguleringssystemer. $ At få forståelse af samspillet mellem teori, simulering og måling. 3. Øvelsen. 1. Undersøg, hvilken indflydelse tidsforsinkelsen Td (se Ez-Kit-Lite) har på processen, ved at anvende den oprindelige analoge regulator (G c (s) =2, K F =2) med og uden EZ_Kit_Lite indskudt i processen. Indsæt Ez-Kit-Lite umiddelbart foran effektforstærkeren (se billede). 2. Afprøv de i forberedelsen dimensionerede digitale Lag-regulatorer. Sammenlign med Matlab simuleringer, og kommenter resultaterne. Som rampeinput anvendes funktionsgeneratorens trekantsignal med en amplitude på +/-6V. 4. Forberedelse. 1. Med udgangspunkt i den analoge proportionalregulator (G c (s) = 2, K F = 2) undersøges det ved beregning, hvilken indflydelse fasedrejningen forårsaget af tidsforsinkelsen Td har på systemet. Sammenlign med åbensløjfe overføringsfunktionens frekvenskarakteristikker. 2. Simuler lukket sløjfe systemets ramperespons (hældning a = 1.2). Simuler uden Lagregulator (G c (s) = 2, f s =48khz) og med Lag- regulator for både den lavest og den højest anbefalede samplingfrekvens (kap 13.10). Den digitale Lag-regulator bestemmes ved en bilineær transformation (Matlab/ Tustin ) af den analoge regulator (α =5, 1/T= ω φm /5) og den z-transformerede overføringsfunktion af processen bestemmes som G 0 (z) = Z[G h (s- )G p (s)] (Matlab/ ZOH ). Her er G p (s) reguleringsobjektet med tidsforsinkelse. Ved simuleringen kan nedestående Matlab kommandoer anvendes t = 0:T:40; x = sawtooth(2*pi/40*t,0.5); y = lsim(tz,12*x); plot(t,12*x,'r',t,y,'g'); Bestem fejlen efter 10 og 20 sek.. Beregn den stationære fejl og sammenlign med resultaterne fra simuleringen. Kommenter indsvingningsforløbet.
37 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) Undersøg hvilken indflydelse det har på rampe- responsen, hvis lag-regulatoren redesignes så nulpkt. placeres 10 gange under systemets fasemarinsfrekvens ( 1/T = ω φm /10). Vælg selv hvilken af de to samplingfrekvenser du vil anvende. 4. Konverter koefficienter, for regulatorerne i spm. 2 og 3, til hexadecimal 1.15 format, så koefficienterne kan indlæses i DSP=en (se afsnit Ez-Kit-Lite). Vælg samme samplingfrekvens som i spm Eksamensrelevante spørgsmål. Der kan stilles uddybende spørgsmål indenfor det pensum, der er dækket af lærebogens kap samt kap og 10, med sidetal som anført i lektionsplanen.der henvises specielt til opgaverne: Exercise 13.3, Exercise 13.9, og øvelsesopgave Ez-Kit-Lite. EZ_Kit_Lite anvender en en-bits delta-sigma-konverter (CODEC), der i modsætning til andre AD/DAkonvertere har en forholdsmæssig stor tidsforsinkelse (delay). Når CODEC en som her er fast indstillet til, at sample med 48khz, er denne tidsforsinkelse Td=0.8m s. Sammen med EZ_Kit_Lite anvendes et konvertermodul, der konverterer EZ_Kit_Lite kortets 1Vrms signalniveauer til +/-10V niveauer. Der er lavet et program til EZ_Kit_Lite der realiserer et 2.ordens IIR-filter på direkte form (se bilag1), hvor tæller og nævner koefficienter (coefa/coefb i fractional mode hex) kan indlæses og samplingtiden T kan vælges, ved at neddele CODEC=ens 48khz samplingfrekvens (T = N/48Khz). De nødvendige programmer ligger på IHA-drev (oplyses af vejleder)/ Campusnet, hvorfra filer kopieres til h-drev=et (h:\reg1\dsp). Regulatoren programmeres på følgende måde: 1. Indlæs konstanter i regulatoralgoritmen direkte.dsp med en teksteditor(notepad). Se markering i bilag Samplingtiden bestemmes, ved at indlæse N i slutningen af modul isr.dsp. Se markering i bilag Åben et dos.vindue ved at click=e på GO-DSP og oversæt programmodulerne i folderen direkte med bat-filen ovs.bat med parameteren direkte (ovs direkte). Herved placeres de oversatte filer i h:\reg1\dsp\direkte 4. Tilslut EZ_Kit_Lite til port 1 med det serielle kabel. Installer Ez_kit_Lite programmet fra Control Panel og åben programmet med ikonet på desk toppen. Vælg eventuelt seriel port under optioner/settings, hvis der ikke er kontakt med kittet. 5. Programmet direkte.exe kan nu downloades til EZ_Kit_Lite efter reset.
38 T-493 REG1 Øvelsesvejledninger og noter (rev.: ) Konvertermodul tilsluttes EZ_Kit_Lite med probe (bemærk pin 1 skal vende frem mod IC=en med den hvide ettiket). 7. EZ_Kit_Lite kan nu indskydes i processen med BNC stikkene på konvertermodulet. Programmet anvender højre kanal på konverteren. 8. EZ_Kit_Lite kopierer de analoge indgange til udgangene efter reset, når promttiden er gået (ca. 5 sek.), uden at der er loaded brugerprogrammer. Implementering af digital regulator: 1. Bestem k*d(z), på grundlag af D(s), således at D(z)= D(-1)~1 (gælder for lag regulatorer, højfrekvensforstærkningen ønskes = 1). Det gælder dog at koefficienterne i D(z) numerisk skal være mindre end 1. Forstærkning/dæmpning k, udføres analogt. 2. Konverter koefficienterne i D(z) fra decimale fortegnstal til binær/hex tal i fractional mode (1.15 format). 3. Bestem N= 48000*T. (se DSP-source kode isr.dsp) 4. Programmer regulatoren.(koefficienter indlæses i hex format i source kode direkte.dsp)
REG1 Øvelsesvejledninger og noter
 Ingeniørhøjskolen i Århus Elektro- og IKT-afdelingen Mine rettelser indført d.20.6.05, CJ JNy rettelser indført den 5/7-05 REG1 Øvelsesvejledninger og noter Carl Jakobsen Jørgen Nybo Februar 2003 Rev.
Ingeniørhøjskolen i Århus Elektro- og IKT-afdelingen Mine rettelser indført d.20.6.05, CJ JNy rettelser indført den 5/7-05 REG1 Øvelsesvejledninger og noter Carl Jakobsen Jørgen Nybo Februar 2003 Rev.
Øvelsesvejledning. Frekvenskarakteristikker Simulering og realisering af passive filtre.
 ELT2, Passive filter, frekvenskarakteristikker Øvelsesvejledning Frekvenskarakteristikker Simulering og realisering af passive filtre. Øvelsen består af 3 dele: 1. En beregningsdel som du forventes at
ELT2, Passive filter, frekvenskarakteristikker Øvelsesvejledning Frekvenskarakteristikker Simulering og realisering af passive filtre. Øvelsen består af 3 dele: 1. En beregningsdel som du forventes at
Indhold. Figur 1: Blokdiagram over regulatorprincip
 m M Indhold.1 Beskrivelse af regulatorer............................. 2.2 Krav til regulator................................. 2.3 Overføringsfunktion for det samlede system................... 4.3.1 Rodkurveundersøgelse..........................
m M Indhold.1 Beskrivelse af regulatorer............................. 2.2 Krav til regulator................................. 2.3 Overføringsfunktion for det samlede system................... 4.3.1 Rodkurveundersøgelse..........................
Indhold. Figur 1: Blokdiagram over regulatorprincip
 Indhold.1 Beskrivelse af regulatorer............................. 2.2 Krav til regulator................................. 2.2.1 Integrator anti-windup.......................... 4.3 Overføringsfunktion
Indhold.1 Beskrivelse af regulatorer............................. 2.2 Krav til regulator................................. 2.2.1 Integrator anti-windup.......................... 4.3 Overføringsfunktion
ELCANIC A/S. ENERGY METER Type ENG110. Version 3.00. Inkl. PC program: ENG110. Version 3.00. Betjeningsvejledning
 ELCANIC A/S ENERGY METER Type ENG110 Version 3.00 Inkl. PC program: ENG110 Version 3.00 Betjeningsvejledning 1/11 Generelt: ELCANIC A/S ENERGY METER Type ENG110 er et microprocessor styret instrument til
ELCANIC A/S ENERGY METER Type ENG110 Version 3.00 Inkl. PC program: ENG110 Version 3.00 Betjeningsvejledning 1/11 Generelt: ELCANIC A/S ENERGY METER Type ENG110 er et microprocessor styret instrument til
Arduino Programmering
 Microcontroller, Arduino I teknologi skal vi lære at lave programmer til uc for at have muligheden til eksamen at kunne lave intelligente el-produkter. I hvert fald skal vi have set mulighederne, og forstået
Microcontroller, Arduino I teknologi skal vi lære at lave programmer til uc for at have muligheden til eksamen at kunne lave intelligente el-produkter. I hvert fald skal vi have set mulighederne, og forstået
Figur 1.1: Blokdiagram over regulatorprincip
 Indhold 1 Design af regulator til DC-motor 2 1.1 Besrivelse af regulatorer............................. 2 1.2 Krav til regulator................................. 3 1.2.1 Integrator anti-windup..........................
Indhold 1 Design af regulator til DC-motor 2 1.1 Besrivelse af regulatorer............................. 2 1.2 Krav til regulator................................. 3 1.2.1 Integrator anti-windup..........................
Microcontroller, Arduino
 Microcontroller, Arduino Programmerbar elektronik. uc Vi skal lære at lave programmer til uc for at kunne lave el-produkter. Forstå princippet i programmering af en uc og se mulighederne. Programmeringen
Microcontroller, Arduino Programmerbar elektronik. uc Vi skal lære at lave programmer til uc for at kunne lave el-produkter. Forstå princippet i programmering af en uc og se mulighederne. Programmeringen
Elektroniske Kredsløb og Dynamiske Systemer
 Elektroniske Kredsløb og Dynamiske Systemer Lektion 4: Regulering Jan Bendtsen May, 29 EKDS mm. 4 Regulering slide i Basal regulering Hvorfor regulering? PID regulatorer i analog Ziegler-Nichols-tuning
Elektroniske Kredsløb og Dynamiske Systemer Lektion 4: Regulering Jan Bendtsen May, 29 EKDS mm. 4 Regulering slide i Basal regulering Hvorfor regulering? PID regulatorer i analog Ziegler-Nichols-tuning
Total systembeskrivelse af AD1847
 Total systembeskrivelse af AD1847 Af Anna Hampen Jens Jørgen Nielsen Johannes Bjerrum Johnny Nielsen 3.semester HIH Anna Hampen, Jens Nielsen, Johannes Bjerrum, Johnny Nielsen 1 Indholdsfortegnelse Indledning...3
Total systembeskrivelse af AD1847 Af Anna Hampen Jens Jørgen Nielsen Johannes Bjerrum Johnny Nielsen 3.semester HIH Anna Hampen, Jens Nielsen, Johannes Bjerrum, Johnny Nielsen 1 Indholdsfortegnelse Indledning...3
Introduktion til MatLab Matematisk Modellering af Dynamiske Modeller ved Kasper Bjering Jensen, RUC, februar 2010
 Introduktion til MatLab Matematisk Modellering af Dynamiske Modeller ved Kasper Bjering Jensen, RUC, februar 2010 Computere er uvurderlige redskaber for personer der ønsker at arbejde med matematiske modeller
Introduktion til MatLab Matematisk Modellering af Dynamiske Modeller ved Kasper Bjering Jensen, RUC, februar 2010 Computere er uvurderlige redskaber for personer der ønsker at arbejde med matematiske modeller
Efter installation af GEM Drive Studio software fra Delta s CD-rom, skal hoved skærmbilledet se således ud: (koden til administrator adgang er: admin)
") Hurtig opstart af Infranor XtrapulsPac-ak drev: Dette er en enkelt og kortfattet vejledning i opsætningen af XtrapulsPac-ak driver til anvendelse i stand-alone mode. Ingen Profibus forbindelse. For senere
Hurtig opstart af Infranor XtrapulsPac-ak drev: Dette er en enkelt og kortfattet vejledning i opsætningen af XtrapulsPac-ak driver til anvendelse i stand-alone mode. Ingen Profibus forbindelse. For senere
C R. Figur 1 Figur 2. er eksempler på kredsløbsfunktioner. Derimod er f.eks. indgangsimpedansen
 Kredsløbsfunktioner Lad os i det følgende betragte kredsløb, der er i hvile til t = 0. Det vil sige, at alle selvinduktionsstrømme og alle kondensatorspændinger er nul til t = 0. I de Laplace-transformerede
Kredsløbsfunktioner Lad os i det følgende betragte kredsløb, der er i hvile til t = 0. Det vil sige, at alle selvinduktionsstrømme og alle kondensatorspændinger er nul til t = 0. I de Laplace-transformerede
Signalbehandling og matematik 1 (Tidsdiskrete signaler og systemer)
") Signalbehandling og matematik 1 (Tidsdiskrete signaler og systemer) Session 1. Sekvenser, diskrete systemer, Lineære systemer, foldning og lineære tidsinvariante systemer Ved Samuel Schmidt sschmidt@hst.aau.dk
Signalbehandling og matematik 1 (Tidsdiskrete signaler og systemer) Session 1. Sekvenser, diskrete systemer, Lineære systemer, foldning og lineære tidsinvariante systemer Ved Samuel Schmidt sschmidt@hst.aau.dk
ELCANIC A/S Counter Type CNT150 Version 2.00 Inkl. PC programmet: Cnt150 Version 3.00 Betjeningsvejledning
 ELCANIC A/S Counter Type CNT150 Version 2.00 Inkl. PC programmet: Cnt150 Version 3.00 Betjeningsvejledning Generelt: ELCANIC A/S COUNTER Type CNT150 er en microprocessor baseret tæller. Specielt designet
ELCANIC A/S Counter Type CNT150 Version 2.00 Inkl. PC programmet: Cnt150 Version 3.00 Betjeningsvejledning Generelt: ELCANIC A/S COUNTER Type CNT150 er en microprocessor baseret tæller. Specielt designet
Indhold. 0.1 Beskrivelse af regulatorer
 Indhold. Beskrivelse af regulatorer................................. Overføringsfunktion for et reguleringssystem................ 2..2 Specifikationer til beskrivelse af systemet.................. 2.2
Indhold. Beskrivelse af regulatorer................................. Overføringsfunktion for et reguleringssystem................ 2..2 Specifikationer til beskrivelse af systemet.................. 2.2
Figur 1.1: Blokdiagram over regulatorprincip
 Kapitel Design af effektregulering I dette kapitel gennemgås principperne bag regulering af motorer, der opstilles krav til, og der designes de to regulatorer til henholdsvis pitchregulering af sevomotoren
Kapitel Design af effektregulering I dette kapitel gennemgås principperne bag regulering af motorer, der opstilles krav til, og der designes de to regulatorer til henholdsvis pitchregulering af sevomotoren
Introduktion. Properties (egenskaber) Timeline (Tidslinien) Stage (hovedscenen) kan redigeres.
 Timeline (Tidslinien) Stage (hovedscenen) kan redigeres.") Flash er et program der bruges til at fremstille animation og interaktion i - især til Internettet. I forhold til andre tilgængelige teknologier er Flash-filer meget små rent datamæssigt. Årsagen er, at
Flash er et program der bruges til at fremstille animation og interaktion i - især til Internettet. I forhold til andre tilgængelige teknologier er Flash-filer meget små rent datamæssigt. Årsagen er, at
Installations- og brugervejledning. for. HDM trafikanalyseprogram til anvendelse sammen med HiStar enhederne NC90, NC90A, NC97 og NC200
 Installations- og brugervejledning for HDM trafikanalyseprogram til anvendelse sammen med HiStar enhederne NC90, NC90A, NC97 og NC200 2008 Tokheim Scandinavia A/S All Rights Reserved INDHOLDSFORTEGNELSE
Installations- og brugervejledning for HDM trafikanalyseprogram til anvendelse sammen med HiStar enhederne NC90, NC90A, NC97 og NC200 2008 Tokheim Scandinavia A/S All Rights Reserved INDHOLDSFORTEGNELSE
Projekt. Analog Effektforstærker.
 Projekt. Analog Effektforstærker. Udarbejdet af: Klaus Jørgensen. Gruppe: Klaus Jørgensen Og Morten From Jacobsen. It og Elektronikteknolog. Erhvervsakademiet Fyn Udarbejdet i perioden: 7/0-03 /-03 Vejledere:
Projekt. Analog Effektforstærker. Udarbejdet af: Klaus Jørgensen. Gruppe: Klaus Jørgensen Og Morten From Jacobsen. It og Elektronikteknolog. Erhvervsakademiet Fyn Udarbejdet i perioden: 7/0-03 /-03 Vejledere:
Kom godt i gang med Fable-robotten
 Kom godt i gang med Fable-robotten 1. Først skal du installere programmet på din computer. Gå ind på shaperobotics.com og under support vælger du download: Her vælger du, under PC App om du kører Windows
Kom godt i gang med Fable-robotten 1. Først skal du installere programmet på din computer. Gå ind på shaperobotics.com og under support vælger du download: Her vælger du, under PC App om du kører Windows
Fable Kom godt i gang
 Fable Kom godt i gang Opdateret: 26-03-2018 Indholdsfortegnelse 1. Først skal du installere programmet på din computer 3 2. Når programmet er installeret er du klar til at pakke robotten ud 4 3. Nu er
Fable Kom godt i gang Opdateret: 26-03-2018 Indholdsfortegnelse 1. Først skal du installere programmet på din computer 3 2. Når programmet er installeret er du klar til at pakke robotten ud 4 3. Nu er
Analog Øvelser. Version. A.1 Afladning af kondensator. Opbyg følgende kredsløb: U TL = 70 % L TL = 50 %
 A.1 Afladning af kondensator Opbyg følgende kredsløb: U TL = 70 % L TL = 50 % Når knappen har været aktiveret, ønskes lys i D1 i 30 sekunder. Brug formlen U C U start e t RC Beskriv kredsløbet Find komponenter.
A.1 Afladning af kondensator Opbyg følgende kredsløb: U TL = 70 % L TL = 50 % Når knappen har været aktiveret, ønskes lys i D1 i 30 sekunder. Brug formlen U C U start e t RC Beskriv kredsløbet Find komponenter.
Quick Setup Guide SB168-ES og M7CL Dansk version
 Quick Setup Guide SB168-ES og M7CL Dansk version February, 2009 SB168-ES og M7CL Quick Setup Guide Beskrivelse af denne guide. Denne guide indeholder en hurtig og enkelt opsætning af M7CL med digital stagebox.
Quick Setup Guide SB168-ES og M7CL Dansk version February, 2009 SB168-ES og M7CL Quick Setup Guide Beskrivelse af denne guide. Denne guide indeholder en hurtig og enkelt opsætning af M7CL med digital stagebox.
Indsvingning af 1. ordens system
 Indsvingning af 1. ordens system Formål Formålet med øvelsen er at eftervise at en forøgelse af belastningen af et procesrør giver en hurtigere indsvingning af systemet. Forsøgsopstilling Procesrør Strømforsyning
Indsvingning af 1. ordens system Formål Formålet med øvelsen er at eftervise at en forøgelse af belastningen af et procesrør giver en hurtigere indsvingning af systemet. Forsøgsopstilling Procesrør Strømforsyning
Tilslutning- og programmeringseksempler
 VLT MicroDrive FC 051 Indholdsfortegnelse Forord... 3 Oversigt effekt og styre kreds VLT MicroDrive... 4 Initialisering af frekvensomformeren... 5 Tilslutning af motorbeskyttelse... 6 Start/stop med analog
VLT MicroDrive FC 051 Indholdsfortegnelse Forord... 3 Oversigt effekt og styre kreds VLT MicroDrive... 4 Initialisering af frekvensomformeren... 5 Tilslutning af motorbeskyttelse... 6 Start/stop med analog
Vejledning til LKdaekW.exe 1. Vejledning til programmet LKdaekW.exe Kristian Hertz
 Vejledning til LKdaekW.exe 1 Vejledning til programmet LKdaekW.exe Kristian Hertz Vejledning til LKdaekW.exe 2 Ansvar Programmet anvendes helt på eget ansvar, og hverken programmør eller distributør kan
Vejledning til LKdaekW.exe 1 Vejledning til programmet LKdaekW.exe Kristian Hertz Vejledning til LKdaekW.exe 2 Ansvar Programmet anvendes helt på eget ansvar, og hverken programmør eller distributør kan
Start af nyt schematic projekt i Quartus II
 Start af nyt schematic projekt i Quartus II Det følgende er ikke fremstillet som en brugsanvisning der gennemgår alle de muligheder der er omkring oprettelse af et Schematic projekt i Quartus II men kun
Start af nyt schematic projekt i Quartus II Det følgende er ikke fremstillet som en brugsanvisning der gennemgår alle de muligheder der er omkring oprettelse af et Schematic projekt i Quartus II men kun
Workshop G8 Tasks og Templates
 Workshop G8 Tasks og Templates FØR I BEGYNDER...... 2-1 TEMPLATES... 2-2 Øvelse template til alm. attributter... 2-2 Øvelse Skraverings template... 2-4 VED ELEMENTET HVAD DET ER FOR ÉN?... 2-4 Øvelse ændre
Workshop G8 Tasks og Templates FØR I BEGYNDER...... 2-1 TEMPLATES... 2-2 Øvelse template til alm. attributter... 2-2 Øvelse Skraverings template... 2-4 VED ELEMENTET HVAD DET ER FOR ÉN?... 2-4 Øvelse ændre
Digital positioner type RE 3446
 Installations- og driftsvejledning IN145 Digital positioner type Indholdsfortegnelse: Side 1 Generel information 2 2 Montering og tilslutning 2 3 Idriftsættelse 3 4 Drifts funktioner 6 5 Funktions beskrivelser
Installations- og driftsvejledning IN145 Digital positioner type Indholdsfortegnelse: Side 1 Generel information 2 2 Montering og tilslutning 2 3 Idriftsættelse 3 4 Drifts funktioner 6 5 Funktions beskrivelser
MANUAL TIL. OptitecRS CIPHERLAB 8000 - SCANNER
 MANUAL TIL OptitecRS CIPHERLAB 8000 - SCANNER INDHOLDSFORTEGNELSE 1 SAMLING OG TILKOBLING AF SCANNER... 1 1.1 STRØM TIL SCANNER... 2 1.2 TILKOBLING TIL COMPUTER... 2 1.2.1 Tilkobling med Seriel Stik...
MANUAL TIL OptitecRS CIPHERLAB 8000 - SCANNER INDHOLDSFORTEGNELSE 1 SAMLING OG TILKOBLING AF SCANNER... 1 1.1 STRØM TIL SCANNER... 2 1.2 TILKOBLING TIL COMPUTER... 2 1.2.1 Tilkobling med Seriel Stik...
Fagets IT Introduktion til MATLAB
 Fagets IT Introduktion til MATLAB Mads G. Christensen mgc@kom.auc.dk Afdeling for Kommunikationsteknologi, Aalborg Universitet. MATLAB 2002 p.1/28 Kursusoversigt 1. Introduktion, matrix-indeksering, -operationer
Fagets IT Introduktion til MATLAB Mads G. Christensen mgc@kom.auc.dk Afdeling for Kommunikationsteknologi, Aalborg Universitet. MATLAB 2002 p.1/28 Kursusoversigt 1. Introduktion, matrix-indeksering, -operationer
RIGSPOLITIET. Vejledning i konvertering. fra. Word -dokument. til. PDF-fil. på politi.dk. Rigspolitiets websektion
 RIGSPOLITIET Vejledning i konvertering fra Word -dokument til PDF-fil på politi.dk Rigspolitiets websektion Indledning Da vi skal leve op til kravene om tilgængelighed på Internettet, skal alle tekster
RIGSPOLITIET Vejledning i konvertering fra Word -dokument til PDF-fil på politi.dk Rigspolitiets websektion Indledning Da vi skal leve op til kravene om tilgængelighed på Internettet, skal alle tekster
Ved indkøring påtrykkes en kendt amplitude (HUSK 50 ohms afslutning) og displayet aflæses.
 og displayet aflæses.") /* Power Meter 2012 /* Rettet den 13.februar 2013 /* Version 1.2 /* Input medie er en AD8307, som forsynes fra Arduino Uno stabiliserede 5 volt. A/D input er på Arduino analog input pin A0 AREF er tilført
/* Power Meter 2012 /* Rettet den 13.februar 2013 /* Version 1.2 /* Input medie er en AD8307, som forsynes fra Arduino Uno stabiliserede 5 volt. A/D input er på Arduino analog input pin A0 AREF er tilført
MP3 player med DMX interface.
 Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK MP3 player med DMX interface. Funktion: En avanceret Mp3spiller med forskellige styringsmuligheder, velegnet til brug i museer, teatre, udstillinger
Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK MP3 player med DMX interface. Funktion: En avanceret Mp3spiller med forskellige styringsmuligheder, velegnet til brug i museer, teatre, udstillinger
Kom godt i gang med I-bogen
 Kom godt i gang med I-bogen At åbne bogen Det allerførste, du skal gøre, for at kunne arbejde med i-bogen, er at aktivere den. Det gøres ved at oprette en konto på systime.dk og derefter aktivere bogen
Kom godt i gang med I-bogen At åbne bogen Det allerførste, du skal gøre, for at kunne arbejde med i-bogen, er at aktivere den. Det gøres ved at oprette en konto på systime.dk og derefter aktivere bogen
Maskinanlæg, opsætning af frekvensomformer
 Maskinanlæg, opsætning af frekvensomformer INDHOLDSFORTEGNELSE Opgaver - Maskinanlæg, opsætning af frekvensomformer...3 2-20 Rekv. 0 Prod. 28-06-2006-08:33 Ordre 000 EFU Opgave 1 1 stk. VLT 2800 1 stk.
Maskinanlæg, opsætning af frekvensomformer INDHOLDSFORTEGNELSE Opgaver - Maskinanlæg, opsætning af frekvensomformer...3 2-20 Rekv. 0 Prod. 28-06-2006-08:33 Ordre 000 EFU Opgave 1 1 stk. VLT 2800 1 stk.
Microcontroller, Arduino
 Microcontroller, Arduino Kompendium til Arduino-programmering i Teknologi. Vi skal lære at lave programmer til uc for at kunne lave el-produkter. Vi skal forstå princippet i programmering af en uc og se
Microcontroller, Arduino Kompendium til Arduino-programmering i Teknologi. Vi skal lære at lave programmer til uc for at kunne lave el-produkter. Vi skal forstå princippet i programmering af en uc og se
IAI Quick Start Guide
 IAI Quick Start Guide Opsætning: Manualen til controllerene ligger i: Produkter\IAI\Manual\RoboCylinder\Controller\ Her ligger den i en undermappe alt efter hvilken type controller det er. Installer RCPC
IAI Quick Start Guide Opsætning: Manualen til controllerene ligger i: Produkter\IAI\Manual\RoboCylinder\Controller\ Her ligger den i en undermappe alt efter hvilken type controller det er. Installer RCPC
Mendeley kan hjælpe dig med at organisere din forskning og samarbejde med andre online.
 Mendeley på Mac Mendeley er både en reference manager og et akademisk socialt netværk. Mendeley kan hjælpe dig med at organisere din forskning og samarbejde med andre online. Mendeley kan generere litteraturlister
Mendeley på Mac Mendeley er både en reference manager og et akademisk socialt netværk. Mendeley kan hjælpe dig med at organisere din forskning og samarbejde med andre online. Mendeley kan generere litteraturlister
Guide til indbygget PLC Teco 7300 CV frekvensomformere
 Guide til indbygget PLC Teco 7300 CV frekvensomformere Juni 2005 Indholdsfortegnelse. Interface...3 Installering af PC-program...3 Forbindelse til frekvensomformer...4 Gem parameteropsætning / PLC-program...7
Guide til indbygget PLC Teco 7300 CV frekvensomformere Juni 2005 Indholdsfortegnelse. Interface...3 Installering af PC-program...3 Forbindelse til frekvensomformer...4 Gem parameteropsætning / PLC-program...7
Introduktion Indtastning Funktioner Scripts Optimering. Matlab
 - robert@math.aau.dk http://www.math.aau.dk/ robert/teaching/2010/matlab 9. august 2010 1/39 Disposition 1. Lidt om. 2. Basiskursus. 3. Opgaver. 4. Mere til basiskursus. 5. Opgaver. 2/39 MATLAB = MATrix
- robert@math.aau.dk http://www.math.aau.dk/ robert/teaching/2010/matlab 9. august 2010 1/39 Disposition 1. Lidt om. 2. Basiskursus. 3. Opgaver. 4. Mere til basiskursus. 5. Opgaver. 2/39 MATLAB = MATrix
Fable Kom godt i gang
 Fable Kom godt i gang Vers. 1.3.1 Opdateret: 29-08-2018 Indholdsfortegnelse 1. Installer programmet 3 2. Pak robotten ud 5 3. I gang med at programmere 6 4. Programmér Fable til at køre fra 90 til -90
Fable Kom godt i gang Vers. 1.3.1 Opdateret: 29-08-2018 Indholdsfortegnelse 1. Installer programmet 3 2. Pak robotten ud 5 3. I gang med at programmere 6 4. Programmér Fable til at køre fra 90 til -90
Dannelse af PDF-dokumenter
 Dannelse af PDF-dokumenter Indhold Generere PDF-dokumenter... 2 Håndtering af PDF-dokumentet... 8 Hvordan indsætter man sidetal i PDF-dokumentet?... 8 Hvordan laver man bookmarks i PDF-dokumentet?... 8
Dannelse af PDF-dokumenter Indhold Generere PDF-dokumenter... 2 Håndtering af PDF-dokumentet... 8 Hvordan indsætter man sidetal i PDF-dokumentet?... 8 Hvordan laver man bookmarks i PDF-dokumentet?... 8
Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK. AC Motor Controller 370W. Brugermanual
 Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK AC Motor Controller 370W Brugermanual WWW.WAHLBERG.DK TELEPHONE +45 86 18 14 20 CELL PHONE +45 40 52 20 88 EMAIL: mads@wahlberg.dk Marts
Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK AC Motor Controller 370W Brugermanual WWW.WAHLBERG.DK TELEPHONE +45 86 18 14 20 CELL PHONE +45 40 52 20 88 EMAIL: mads@wahlberg.dk Marts
Lonbox PCM2001 betjeningsenhed
 PROLON CONTROL SYSTEMS Herstedvesterstræde 56 DK-2620 Albertslund Danmark Tlf.: (+45) 43620625 Fax: (+45) 43623125 Lonbox PCM2001 betjeningsenhed Bruger vejledning Oktober 2002 Denne manual beskriver installation
PROLON CONTROL SYSTEMS Herstedvesterstræde 56 DK-2620 Albertslund Danmark Tlf.: (+45) 43620625 Fax: (+45) 43623125 Lonbox PCM2001 betjeningsenhed Bruger vejledning Oktober 2002 Denne manual beskriver installation
GIS. Guide til indlæsning af data i ArcGIS herunder KMS-data fra internettet
 GIS Af Anders Bartholdy Guide til indlæsning af data i ArcGIS herunder KMS-data fra internettet Baggrundskort fra KMS er en rigtig god resurse der er tilgængelig via ArcGIS. Derfor starter vi med at gennemgå
GIS Af Anders Bartholdy Guide til indlæsning af data i ArcGIS herunder KMS-data fra internettet Baggrundskort fra KMS er en rigtig god resurse der er tilgængelig via ArcGIS. Derfor starter vi med at gennemgå
Kom i gang med Course Tool 1.2
 Kom i gang med Course Tool 1.2 Indhold Indledning...2 Pris beregning...2 Anvendelse...2 Open Source...2 Anbefalinger...2 Installation...3 USB-Pen...3 Download Libre Office (Draw)...3 Indstil makrosikkerhed...4
Kom i gang med Course Tool 1.2 Indhold Indledning...2 Pris beregning...2 Anvendelse...2 Open Source...2 Anbefalinger...2 Installation...3 USB-Pen...3 Download Libre Office (Draw)...3 Indstil makrosikkerhed...4
Hurtig Start Guide 1
 Hurtig Start Guide 1 Kamera Tilslutnings Diagram Telefon Tablet OBS: I den indledende opsætning, tilslut kameraet til routeren med Ethernet kablet, følg derefter de næste trin 2 1. Installer Reolink APP
Hurtig Start Guide 1 Kamera Tilslutnings Diagram Telefon Tablet OBS: I den indledende opsætning, tilslut kameraet til routeren med Ethernet kablet, følg derefter de næste trin 2 1. Installer Reolink APP
Selektro CCM App. Brugermanual. Selektro CCM App Brugermanual DK. Selektro A/S, Erhvervsvej 29-35, DK-9632 Møldrup. Copyright Selektro A/S 2017
 Selektro CCM App Brugermanual Selektro A/S, Erhvervsvej 29-35, DK-9632 Møldrup Selektro CCM App Brugermanual DK Copyright Selektro A/S 2017 0881-1344006 V01 Indhold 1 Beskrivelse... 1 1.1 Funktion... 2
Selektro CCM App Brugermanual Selektro A/S, Erhvervsvej 29-35, DK-9632 Møldrup Selektro CCM App Brugermanual DK Copyright Selektro A/S 2017 0881-1344006 V01 Indhold 1 Beskrivelse... 1 1.1 Funktion... 2
Alle dip 1 7 sættes til On for at opnå stand-alone operation fra PC.
 Hurtig opstart af Infranor CD1 p og pm: Dette er en enkelt og kortfattet vejledning i opsætningen af CD 1 p og pm driver til anvendelse i stand-alone mode. Ingen Profibus forbindelse. For senere opkobling
Hurtig opstart af Infranor CD1 p og pm: Dette er en enkelt og kortfattet vejledning i opsætningen af CD 1 p og pm driver til anvendelse i stand-alone mode. Ingen Profibus forbindelse. For senere opkobling
Gammaspektrum med multikanalanalysatoren
 Fysikøvelse - Erik Vestergaard www.matematikfysik.dk 1 Gammaspektrum med multikanalanalysatoren Formål Formålet med øvelsen er at identificere et ukendt radioaktivt stof, som udsender gammastråling. Dette
Fysikøvelse - Erik Vestergaard www.matematikfysik.dk 1 Gammaspektrum med multikanalanalysatoren Formål Formålet med øvelsen er at identificere et ukendt radioaktivt stof, som udsender gammastråling. Dette
HUMANWARE BRAILLIANT INSTALLATIONSVEJLEDNING
 HUMANWARE BRAILLIANT INSTALLATIONSVEJLEDNING KOMMANDOOVERSIGT TIL BRUG PÅ WINDOWS COMPUTERE MED JAWS INTRODUKTION: Brailliant displays har indbygget BlueTooth og USB. BlueTooth anvendes til at forbinde
HUMANWARE BRAILLIANT INSTALLATIONSVEJLEDNING KOMMANDOOVERSIGT TIL BRUG PÅ WINDOWS COMPUTERE MED JAWS INTRODUKTION: Brailliant displays har indbygget BlueTooth og USB. BlueTooth anvendes til at forbinde
Testsignaler til kontrol af en målekæde
 20. marts 2007 RL 12/07 OFC/THP/CB/lm MILJØSTYRELSENS Testsignaler til kontrol af en målekæde Resumé Der er udarbejdet testsignaler, som gør det muligt at kontrollere en samlet målekæde. Testsignalerne,
20. marts 2007 RL 12/07 OFC/THP/CB/lm MILJØSTYRELSENS Testsignaler til kontrol af en målekæde Resumé Der er udarbejdet testsignaler, som gør det muligt at kontrollere en samlet målekæde. Testsignalerne,
OrCAD Capture TCL IDE med Eclipse
 OrCAD Capture TCL IDE med Eclipse OrCAD Capture TCL er et script sprog til at lave applikationer til OrCAD Capture. Eclipse er et gratis udviklingsmiljø med debug muligheder. Denne guide hjælper med at
OrCAD Capture TCL IDE med Eclipse OrCAD Capture TCL er et script sprog til at lave applikationer til OrCAD Capture. Eclipse er et gratis udviklingsmiljø med debug muligheder. Denne guide hjælper med at
WT-1011RC Programmer User Guide
 WT-1011RC Programmer User Guide Firmware Version 1.9 Note: 1. Information in this manual is subject to change without notice and does not represent a commitment of manufacturer. 2. Manufacturer shall not
WT-1011RC Programmer User Guide Firmware Version 1.9 Note: 1. Information in this manual is subject to change without notice and does not represent a commitment of manufacturer. 2. Manufacturer shall not
Fang Prikkerne. Introduktion. Scratch
 Scratch 2 Fang Prikkerne All Code Clubs must be registered. Registered clubs appear on the map at codeclubworld.org - if your club is not on the map then visit jumpto.cc/ccwreg to register your club. Introduktion
Scratch 2 Fang Prikkerne All Code Clubs must be registered. Registered clubs appear on the map at codeclubworld.org - if your club is not on the map then visit jumpto.cc/ccwreg to register your club. Introduktion
Vejledning KPK Online Prøverum
 Vejledning KPK Online Prøverum INDHOLD Introduktion side 2 Funktionsliste side 2 Få adgang til systemet side 3 Opload dine billeder side 4 Sådan bruges systemet side 5 Gem dine eksempler side 7 Side 1/7
Vejledning KPK Online Prøverum INDHOLD Introduktion side 2 Funktionsliste side 2 Få adgang til systemet side 3 Opload dine billeder side 4 Sådan bruges systemet side 5 Gem dine eksempler side 7 Side 1/7
3 Overføringsfunktion
 1 3 Overføringsfunktion 3.1 Overføringsfunktion For et system som vist på figur 3.1 er overføringsfunktionen givet ved: Y (s) =H(s) X(s) [;] (3.1) Y (s) X(s) = H(s) [;] (3.2) Y (s) er den Laplacetransformerede
1 3 Overføringsfunktion 3.1 Overføringsfunktion For et system som vist på figur 3.1 er overføringsfunktionen givet ved: Y (s) =H(s) X(s) [;] (3.1) Y (s) X(s) = H(s) [;] (3.2) Y (s) er den Laplacetransformerede
Brugervejledning. ComX brugervejledning version 4.1
 Brugervejledning ComX brugervejledning version 4.1 1 INDHOLD PAKKENS INDHOLD Pakkens indhold side 2 Fjernbetjening side 2 Tilslutning af Settop-boksen side 3 Introduktion til Bredbånds-TV side 4 Tilslutning
Brugervejledning ComX brugervejledning version 4.1 1 INDHOLD PAKKENS INDHOLD Pakkens indhold side 2 Fjernbetjening side 2 Tilslutning af Settop-boksen side 3 Introduktion til Bredbånds-TV side 4 Tilslutning
Bruger Manual PC Valtronics Udendørs Kamera - Windows system
 Bruger Manual PC Valtronics Udendørs Kamera - Windows system Brugervejledning til PC (windows) 1. Installation af kamera Vejledningen er almen for alle Valtronics kameraer, og derfor kan billederne af
Bruger Manual PC Valtronics Udendørs Kamera - Windows system Brugervejledning til PC (windows) 1. Installation af kamera Vejledningen er almen for alle Valtronics kameraer, og derfor kan billederne af
P-regulering med bias - PID-regulator
 P-regulering med bias - PID-regulator Formål Formålet med øvelsen er at finde ud af hvordan den stationære fejl ændres ved forskellige belastninger og forstærkninger, samt hvilken indflydelse bias har
P-regulering med bias - PID-regulator Formål Formålet med øvelsen er at finde ud af hvordan den stationære fejl ændres ved forskellige belastninger og forstærkninger, samt hvilken indflydelse bias har
Kronback tracers P4+
 Brugervejledning Kronback tracers P4+ Fax:(+45) 46 907 910 Side 1 of 19 CONTENT 1. UDFORMNING OG FORBINDELSER 4 1.1. Serie nummer 5 1.2. Grafisk display 5 1.3. Navigationsknapper 6 1.4. 6-30V strømforsyning
Brugervejledning Kronback tracers P4+ Fax:(+45) 46 907 910 Side 1 of 19 CONTENT 1. UDFORMNING OG FORBINDELSER 4 1.1. Serie nummer 5 1.2. Grafisk display 5 1.3. Navigationsknapper 6 1.4. 6-30V strømforsyning
3 Tilføj printer "HP-GL/2 devices, ADI 4.3 - for Autodesk by HP" 5 Klik "Printer ikonet" - Print/Plot configuration
 Plot filer fra AutoCad 14. 1 Åben Autocad 14 2 Klik "Filer" og vælg "Printer setup" 3 Tilføj printer "HP-GL/2 devices, ADI 4.3 - for Autodesk by HP" 4 Klik "Ok" 5 Klik "Printer ikonet" - Print/Plot configuration
Plot filer fra AutoCad 14. 1 Åben Autocad 14 2 Klik "Filer" og vælg "Printer setup" 3 Tilføj printer "HP-GL/2 devices, ADI 4.3 - for Autodesk by HP" 4 Klik "Ok" 5 Klik "Printer ikonet" - Print/Plot configuration
LH-CD6(P) tykkelsessmåling
 tykkelsessmåling") SUNX LH-50 serien Quickguide LH-CD6(P) tykkelsessmåling Tak fordi du har valgt SUNX. Denne quickguide er designet som hjælp til førstegangsbrugeren. Denne vejledning koncentrerer sig om brugere, der skal
SUNX LH-50 serien Quickguide LH-CD6(P) tykkelsessmåling Tak fordi du har valgt SUNX. Denne quickguide er designet som hjælp til førstegangsbrugeren. Denne vejledning koncentrerer sig om brugere, der skal
Første møde med skærmbilledet i After Effects 6,5 PRO Lidt om animering
 Bent Sehested Side - 1 Første møde med skærmbilledet i After Effects 6,5 PRO Lidt om animering Hvert lag i Compositionen har et afmærket ankerpunkt. Det er koordinaterne for diagonalernes skæring. Der
Bent Sehested Side - 1 Første møde med skærmbilledet i After Effects 6,5 PRO Lidt om animering Hvert lag i Compositionen har et afmærket ankerpunkt. Det er koordinaterne for diagonalernes skæring. Der
WEA-Base Brugervejledning til vejetransmitter
 WEA-Base Brugervejledning til vejetransmitter Version 3.4 WEA-Base Brugervejledning til vejetransmitter WEA-Base Brugervejledning til vejetransmitter Version 3.4 Indholdsfortegnelse 1. Tekniske data...
WEA-Base Brugervejledning til vejetransmitter Version 3.4 WEA-Base Brugervejledning til vejetransmitter WEA-Base Brugervejledning til vejetransmitter Version 3.4 Indholdsfortegnelse 1. Tekniske data...
Quick Setup Guide SB168-ES og LS9 Dansk version
 Quick Setup Guide SB168-ES og LS9 Dansk version February, 2009 SB168-ES og LS9 Quick Setup Guide Beskrivelse af denne guide. Denne guide indeholder en hurtig og enkelt opsætning af LS932 med SB168ES digital
Quick Setup Guide SB168-ES og LS9 Dansk version February, 2009 SB168-ES og LS9 Quick Setup Guide Beskrivelse af denne guide. Denne guide indeholder en hurtig og enkelt opsætning af LS932 med SB168ES digital
Vejledning INSTALLATION AF ZHC5010 BETJENINGSTRYK MED FIBARO HOME CENTER. ZHC5010 Firmware Version: 1.0
 Vejledning INSTALLATION AF ZHC5010 BETJENINGSTRYK MED FIBARO HOME CENTER. ZHC5010 Firmware Version: 1.0 Indledning Denne vejledning beskriver hvordan det er muligt at oprette Z-Home Controls ZHC5010 Betjeningstryk
Vejledning INSTALLATION AF ZHC5010 BETJENINGSTRYK MED FIBARO HOME CENTER. ZHC5010 Firmware Version: 1.0 Indledning Denne vejledning beskriver hvordan det er muligt at oprette Z-Home Controls ZHC5010 Betjeningstryk
Indholdsfortegnelse PSpice modul 3. Forudsætninger. Forberedelse til øvelser
 Indholdsfortegnelse PSpice modul 3 Model Editor, opret diode ud fra model fundet på internettet.... 2 Parametrisk Analyse... 6 Ekstra - Parametrisk analyse på diode parameter... 9 Forudsætninger For at
Indholdsfortegnelse PSpice modul 3 Model Editor, opret diode ud fra model fundet på internettet.... 2 Parametrisk Analyse... 6 Ekstra - Parametrisk analyse på diode parameter... 9 Forudsætninger For at
Graph brugermanual til matematik C
 Graph brugermanual til matematik C Forord Efterfølgende er en guide til programmet GRAPH. Programmet kan downloades gratis fra nettet og gemmes på computeren/et usb-stik. Det betyder, det også kan anvendes
Graph brugermanual til matematik C Forord Efterfølgende er en guide til programmet GRAPH. Programmet kan downloades gratis fra nettet og gemmes på computeren/et usb-stik. Det betyder, det også kan anvendes
Indledning. På de følgende sider vises, primært i tegneserieform, lidt om mulighederne i PC-AXIS for Windows.
 Indledning PC-AXIS for Windows er et talbehandlingsprogram, der kan håndtere store mængder statistisk materiale. PC-AXIS giver mulighed for at arbejde videre med det statistiske materiale i egne programmer
Indledning PC-AXIS for Windows er et talbehandlingsprogram, der kan håndtere store mængder statistisk materiale. PC-AXIS giver mulighed for at arbejde videre med det statistiske materiale i egne programmer
OZ5BIR SWR/POWERMETER
 OZ5BIR SWR/POWERMETER 2-KANAL POWERMETER OG SWR METER. Vejledning i betjening og kalibrering af OZ5BIR SWR/Powermeter Software version OZ1OP v.1.1.1., build 64. side 1 INDHOLD Beskrivelse... 3 Generelt...
OZ5BIR SWR/POWERMETER 2-KANAL POWERMETER OG SWR METER. Vejledning i betjening og kalibrering af OZ5BIR SWR/Powermeter Software version OZ1OP v.1.1.1., build 64. side 1 INDHOLD Beskrivelse... 3 Generelt...
Matlab-kommandoer. Robert Jacobsen. 9. august 2010
 Matlab-kommandoer Robert Jacobsen 9. august 2010 1 Kommandoer til Matlabs funktionaliteter Ønsker man at køre Matlab fra terminalen, ses de mulige options med matlab -help. For at starte Matlab uden det
Matlab-kommandoer Robert Jacobsen 9. august 2010 1 Kommandoer til Matlabs funktionaliteter Ønsker man at køre Matlab fra terminalen, ses de mulige options med matlab -help. For at starte Matlab uden det
Simulering af en Mux2
 Simulering af en Mux2 Indhold Start QuartusII op start et nyt projekt.... 2 Fitter opsætning... 6 Opstart af nyt Block diagram... 8 ModelSim... 14 Hvis man vil ændre data grafisk kan det også lade sig
Simulering af en Mux2 Indhold Start QuartusII op start et nyt projekt.... 2 Fitter opsætning... 6 Opstart af nyt Block diagram... 8 ModelSim... 14 Hvis man vil ændre data grafisk kan det også lade sig
www.velleman.be http://forum.velleman.be/
 www.velleman.be http://forum.velleman.be/ Hardware opsætning... 5 Software installation... 6 Opstart af software... 7 Oscilloskop... 8 Spectrum analyser... 9 Periodisk recorder... 10 Funktionsgenerator...
www.velleman.be http://forum.velleman.be/ Hardware opsætning... 5 Software installation... 6 Opstart af software... 7 Oscilloskop... 8 Spectrum analyser... 9 Periodisk recorder... 10 Funktionsgenerator...
Brug af Zeiss DuraMax
 Brug af Zeiss DuraMax Indhold Opstart af Duramax... 3 Brug af eksisterende Measurement Plan (Program)... 4 Opmåling af emne... 4 Udprintning... 6 Import af CAD model... 7 Klargør solid til måling... 8
Brug af Zeiss DuraMax Indhold Opstart af Duramax... 3 Brug af eksisterende Measurement Plan (Program)... 4 Opmåling af emne... 4 Udprintning... 6 Import af CAD model... 7 Klargør solid til måling... 8
PA system i studie 2. Indholdsfortegnelse: 1. GENEREL BESKRIVELSE 2. DETALJERET BESKRIVELSE 3. SIMPEL BRUG AF PA SYSTEMET BRUG AF PA SYSTEMET:...
 Teknologiprojektet Indholdsfortegnelse: 1. GENEREL BESKRIVELSE BESKRIVELSE AF PA SYSTEMET.... 2 BLOKDIAGRAM:... 2 2. DETALJERET BESKRIVELSE BESKRIVELSE AF PA SYSTEMET.... 3 HØJTTALERE:... 3 FORSTÆRKERE:...
Teknologiprojektet Indholdsfortegnelse: 1. GENEREL BESKRIVELSE BESKRIVELSE AF PA SYSTEMET.... 2 BLOKDIAGRAM:... 2 2. DETALJERET BESKRIVELSE BESKRIVELSE AF PA SYSTEMET.... 3 HØJTTALERE:... 3 FORSTÆRKERE:...
Tillykke med din nye Cobra søkort plotter. Her er en kort gennemgang i brugen af din nye kortplotter, og de ting du skal være opmærksom på.
 COBRA MC 600CI/CX INDLEDNING Tillykke med din nye Cobra søkort plotter. Her er en kort gennemgang i brugen af din nye kortplotter, og de ting du skal være opmærksom på. COBRA søkortplotteren bruger C-MAP
COBRA MC 600CI/CX INDLEDNING Tillykke med din nye Cobra søkort plotter. Her er en kort gennemgang i brugen af din nye kortplotter, og de ting du skal være opmærksom på. COBRA søkortplotteren bruger C-MAP
Storage oscilloscope
 Dette dokument er et forsøg på at gøre brugen af GDS-1072A-U Digital Storage Oscilloscope lidt lettere. Hent: Fabrikantens Manual (PDF), En anden Manual: PC-software ( Brug PC-en sammen med Scopet ), Driver
Dette dokument er et forsøg på at gøre brugen af GDS-1072A-U Digital Storage Oscilloscope lidt lettere. Hent: Fabrikantens Manual (PDF), En anden Manual: PC-software ( Brug PC-en sammen med Scopet ), Driver
Skriftlig prøve i KDS
 Kredsløbsteori & dynamiske systemer for EIT2/16 Opgavesæt 02 160728HEb Kredsløbsteori & dynamiske systemer Skriftlig prøve i KDS Omprøve d. 16. august 2016 kl. 09.00-13.00. Ved bedømmelsen vægtes de 4
Kredsløbsteori & dynamiske systemer for EIT2/16 Opgavesæt 02 160728HEb Kredsløbsteori & dynamiske systemer Skriftlig prøve i KDS Omprøve d. 16. august 2016 kl. 09.00-13.00. Ved bedømmelsen vægtes de 4
Indholdsfortegnelse. Indholdsfortegnelse.. side 2. Adgang til webgraf 3. Opslag adresse... 4. Styring af layout.. 5. Zoom funktioner..
 Indholdsfortegnelse Indholdsfortegnelse.. side 2 Adgang til webgraf 3 Opslag adresse... 4 Styring af layout.. 5 Zoom funktioner.. 6 Panorere på skærmen. 7 Information om grafikken.... 8-10 Print et udsnit.....
Indholdsfortegnelse Indholdsfortegnelse.. side 2 Adgang til webgraf 3 Opslag adresse... 4 Styring af layout.. 5 Zoom funktioner.. 6 Panorere på skærmen. 7 Information om grafikken.... 8-10 Print et udsnit.....
Nedenstående opgaver er lavet til en Allen-Bradley PLC, men uden videre tilpasses andre PLC typer.
 PLC, analogteknik Øvelse 1 Nedenstående opgaver er lavet til en Allen-Bradley PLC, men uden videre tilpasses andre PLC typer. Timer 1.1 "TON" Timer on delay: I skal konstruerer en styring, hvor en lampe
PLC, analogteknik Øvelse 1 Nedenstående opgaver er lavet til en Allen-Bradley PLC, men uden videre tilpasses andre PLC typer. Timer 1.1 "TON" Timer on delay: I skal konstruerer en styring, hvor en lampe
PC-Logging System MTD-Log. for. NS-Proces-Alarm. ninasoft
 PC-Logging System MTD-Log for NS-Proces-Alarm. ninasoft PC-Logging System for NS-Proces-Alarm. Side 1 Generelt PC-Logging Systemet er et dataopsamlings system, der kun kan benyttes sammen med NS-Proces-Alarmen.
PC-Logging System MTD-Log for NS-Proces-Alarm. ninasoft PC-Logging System for NS-Proces-Alarm. Side 1 Generelt PC-Logging Systemet er et dataopsamlings system, der kun kan benyttes sammen med NS-Proces-Alarmen.
WELLPLOT ARCGIS BRUGERMANUAL 9.3.1 I G I S A P S 2 0 1 1
 WELLPLOT ARCGIS BRUGERMANUAL 9.3.1 I G I S A P S 2 0 1 1 W e l l P l o t A r c G I S BRUGERMANUAL 9.3.1 Udarbejdet for: Titel: Dokumenttype: I GIS ApS WellPlot ArcGIS Brugermanual 9.3.1 Software manual
WELLPLOT ARCGIS BRUGERMANUAL 9.3.1 I G I S A P S 2 0 1 1 W e l l P l o t A r c G I S BRUGERMANUAL 9.3.1 Udarbejdet for: Titel: Dokumenttype: I GIS ApS WellPlot ArcGIS Brugermanual 9.3.1 Software manual
Programmeringseksempel til CX/IPC
 APP-NOTE 610004 Beckhoff Application Note Date: 7/17/2009 Document Status: 1.1 Beckhoff Automation Aps Naverland 2, DK-2600 Glostrup Phone +45 43 46 76 20 Fax +45 43 46 63 35 Programmeringseksempel til
APP-NOTE 610004 Beckhoff Application Note Date: 7/17/2009 Document Status: 1.1 Beckhoff Automation Aps Naverland 2, DK-2600 Glostrup Phone +45 43 46 76 20 Fax +45 43 46 63 35 Programmeringseksempel til
Programmering. Det rent og skært nødvendige, det elementært nødvendige! Morten Dam Jørgensen
 Programmering Det rent og skært nødvendige, det elementært nødvendige! Morten Dam Jørgensen Oversigt Undervisningen Hvad er programmering Hvordan er et program organiseret? Programmering og fysik Nobelprisen
Programmering Det rent og skært nødvendige, det elementært nødvendige! Morten Dam Jørgensen Oversigt Undervisningen Hvad er programmering Hvordan er et program organiseret? Programmering og fysik Nobelprisen
Måle og test I. Lasse Kaae 2012
 Måle og test I Lasse Kaae 2012 Plan for de næste 2 uger Uge 1 grundlæggende VEE NI Labview (Torsdag) Anders Meisner Uge 2 Workshop VEE VEE instrument-styring Labview NI USB 6008 Måle øvelser Lasse Kaae
Måle og test I Lasse Kaae 2012 Plan for de næste 2 uger Uge 1 grundlæggende VEE NI Labview (Torsdag) Anders Meisner Uge 2 Workshop VEE VEE instrument-styring Labview NI USB 6008 Måle øvelser Lasse Kaae
Kom hurtigt i gang. med. FloorPlan 3D. FloorPlan 3D er et program med mange anvendelsesmuligheder!
 Kom hurtigt i gang med FloorPlan 3D FloorPlan 3D er et program med mange anvendelsesmuligheder! Formålet med denne guide, er at give et overblik over de grundlæggende funktioner i FloorPlan 3D og at få
Kom hurtigt i gang med FloorPlan 3D FloorPlan 3D er et program med mange anvendelsesmuligheder! Formålet med denne guide, er at give et overblik over de grundlæggende funktioner i FloorPlan 3D og at få
Ruko SmartAir. Updater installation
 Ruko SmartAir Updater installation Introduktion. Updateren er en speciel enhed som giver os mulighed for at tilføje, læse og skrive funktioner i en offline installation. Med læse og skrive funktionen kan
Ruko SmartAir Updater installation Introduktion. Updateren er en speciel enhed som giver os mulighed for at tilføje, læse og skrive funktioner i en offline installation. Med læse og skrive funktionen kan
Streame fra Winamp til Dreambox/pc på netværk.
 Streame fra Winamp til Dreambox/pc på netværk. 1. Formål 2. Forudsætninger og installationer 3. Opsætning 4. Start streaming 5. Aflyt streaming 6. Kontakt 1. Formål Mange benytter Winamp ( Nullsoft, Inc.)
Streame fra Winamp til Dreambox/pc på netværk. 1. Formål 2. Forudsætninger og installationer 3. Opsætning 4. Start streaming 5. Aflyt streaming 6. Kontakt 1. Formål Mange benytter Winamp ( Nullsoft, Inc.)
Introduktion til TI-Interactive!
 Introduktion til TI-Interactive! TI-Interactive! er et program, som befinder sig i grænseområdet mellem almindelig tekstbehandling, regneark og egentlige tunge matematikprogrammer. Man kan gøre mange af
Introduktion til TI-Interactive! TI-Interactive! er et program, som befinder sig i grænseområdet mellem almindelig tekstbehandling, regneark og egentlige tunge matematikprogrammer. Man kan gøre mange af
Indstillinger. 1. Built-in viewer 2. Built-in viewer embedded 3. Ekstern viewer
 TeXMaker guide TeXMaker er den editor, som vi anbefaler til at skrive LaTeX i. Det er en såkaldt cross-platform editor og kan benyttes til både Windows, Mac og Linux. TeXMaker er en ret almindelig editor
TeXMaker guide TeXMaker er den editor, som vi anbefaler til at skrive LaTeX i. Det er en såkaldt cross-platform editor og kan benyttes til både Windows, Mac og Linux. TeXMaker er en ret almindelig editor
Intelligent Solar Charge Controller Solar30 User s Manual
 OM Solceller Intelligent Solar Charge Controller Solar30 User s Manual Læs venligst denne instruktion grundigt igennem, før du bruger den. 1 Produkt introduktion: Denne controller er en slags intelligent
OM Solceller Intelligent Solar Charge Controller Solar30 User s Manual Læs venligst denne instruktion grundigt igennem, før du bruger den. 1 Produkt introduktion: Denne controller er en slags intelligent
Wahlberg Surtitle Display
 Wahlberg Surtitle Display (Copyright by WAHLBERG ApS) Bruger manual Software version - 1.88 Produktindhold: Strømkabel USB to RS232 Converter. Undertekst lysavis 2,8 Meter lang / 0,3 Meter høj. Wahlberg
Wahlberg Surtitle Display (Copyright by WAHLBERG ApS) Bruger manual Software version - 1.88 Produktindhold: Strømkabel USB to RS232 Converter. Undertekst lysavis 2,8 Meter lang / 0,3 Meter høj. Wahlberg
Piano Tuning & String Analyzing Tool
 Piano Tuning & String Analyzing Tool Læs mig indeholder oplysninger om bedst brug af sitet samt oplysninger om Piano Tuning & String Analyzing Tool, operativsystemer og lydkort. Programmet vil herefter
Piano Tuning & String Analyzing Tool Læs mig indeholder oplysninger om bedst brug af sitet samt oplysninger om Piano Tuning & String Analyzing Tool, operativsystemer og lydkort. Programmet vil herefter
Dannelse af PDF dokumenter
 Dannelse af PDF dokumenter Indhold Dannelse af PDF-dokumenter i Phd Planner... 2 Valg af vedhæftninger i PDF dokumentet... 2 Valg af skabelon for PDF dokumentet... 3 Når PDF filen er dannet... 5 Gem PDF
Dannelse af PDF dokumenter Indhold Dannelse af PDF-dokumenter i Phd Planner... 2 Valg af vedhæftninger i PDF dokumentet... 2 Valg af skabelon for PDF dokumentet... 3 Når PDF filen er dannet... 5 Gem PDF
EMSD 7 Gr. 15 Aalborg Universitet
 Elektro Mekanisk System Design EMSD 7 Gr. 15 Aalborg Universitet Institut for EnergiTeknik Pontoppidanstræde 101, 9220 Aalborg Øst Det Teknisk-Naturvidenskabelige Fakultet Aalborg Universitet M-sektoren
Elektro Mekanisk System Design EMSD 7 Gr. 15 Aalborg Universitet Institut for EnergiTeknik Pontoppidanstræde 101, 9220 Aalborg Øst Det Teknisk-Naturvidenskabelige Fakultet Aalborg Universitet M-sektoren
Opstart. I gang med Dreamweaver. Læs mere om...
 Generelle bemærkninger Programmet Dreamweaver har været på markedet i nogle år efterhånden. Den seneste version hedder Dreamweaver CS5, og programmet er på engelsk. Dreamweaver er en såkaldt grafisk editor,
Generelle bemærkninger Programmet Dreamweaver har været på markedet i nogle år efterhånden. Den seneste version hedder Dreamweaver CS5, og programmet er på engelsk. Dreamweaver er en såkaldt grafisk editor,
Projekt - RoboNet Del Journal.
 Projekt - RoboNet Del Journal. Udarbejdet af: Klaus Jørgensen. Gruppe: Jacob Clausen, Klaus Jørgensen og Ole Rud It og Elektronikteknolog, 2a Erhvervsakademiet Fyn Udarbejdet i perioden: 20/01-03 03/02-03
Projekt - RoboNet Del Journal. Udarbejdet af: Klaus Jørgensen. Gruppe: Jacob Clausen, Klaus Jørgensen og Ole Rud It og Elektronikteknolog, 2a Erhvervsakademiet Fyn Udarbejdet i perioden: 20/01-03 03/02-03