Synopsis: Titel: Automobil Permanent Magnet generator med buck/boost konverter
|
|
|
- Vilhelm Jepsen
- 8 år siden
- Visninger:
Transkript
1

2

3 Titel: Automobil Permanent Magnet generator med buck/boost konverter Semester: 4. semester Energiteknik Semester tema: Regulering af energiomsættende systemer ECTS: 17 Projektperiode: Fra til Projektgruppe: ET4-401 Deltagere: Lars Grundahl Martin Larsen Marie Cecilie Pedersen Linn Laurberg Jensen John Nielsen Jakob Holmer Sehested Vejledere: Erik Schaltz Oplagstal: 8 Sidetal: 121 Bilag: appendiks + CD Synopsis: For at forbedre konventionelle bilers brændstofforbrug og effektivitet, er det nødvendigt at se på de enkelte dele. I rapporten sættes fokus på klopolsgeneratoren, hvor spole-feltet i rotoren erstattes med permanente magneter. I rapporten analyseres udskiftningen og hvilken betydning denne har for systemet. Det vil blive gennemgået, hvordan størrelsen på den permanente magnet kan beregnes, samt hvordan udskiftningen fysisk realiseres. Efterfølgende ses på konvertersystemet, der tilpasser ladespændingen til bilbatteriet. Det vil herunder fremgå, hvordan duty cyclen på buck-boost konverteren reguleres, således at konverteren er i stand til at levere en konstant spænding til batteriet på 14 V. Til dette formål designes en PI-lead regulator. Forsøgene er foretaget på en klopolsgenerator, der trækkes af en 2,5 kw DC-motor. Der er foretaget en række delforsøg på en basisforsøgsopstilling. Heraf to, der har til hensigt at finde effektiviteten både før og efter udskiftning af spole. Effektiviteten på den oprindelige klopolsgenerator er målt til 36%. Ud fra dimensioneringen af den permanente magnet beregnes, at der skal anvendes en magnet med en længde på 28 mm og et overflade areal på 1244 mm 2. Da dette ikke kunne leveres, er der anvendt 10 cylindriske permanent magneter med længden 20 mm og et samlet overfladeareal på 785 mm 2. Testen af det samlede system med ombygget klopolsgenerator og konverter har en samlet virkningsgrad på maksimalt 11 %. Det kan for denne rapport konkluderes, at modificeringen af klopolsgeneratoren og det tilkoblede konverter system er muligt at realisere, men ikke med den ønskede virkning.

4
5 Forord Det overordnede tema, for projektarbejdet på 4. semester på Energiteknik, er regulering. Dette er inddraget i projektet i forbindelse med styring af konverteren. Rapporten er forsøgt udarbejdet på et niveau, der henvender sig til naturvidenskabelige studerende på 4. semester. Fagene Anvendt Reguleringsteknik og Effektelektronik, samt Elektrofysik fra 3. semester, er inddraget i projektet. Kendskab til fagene er nødvendig for forståelse af rapporten. Rapporten er opbygget af 9 kapitler fra indledning til perspektivering og 5 Appendiks. Indledende teoriafsnit har til hensigt at give den nødvendige forståelse af de enkelte emner. Under formler i rapporten listes de forskellige variable med enheder. De mest anvendte kilder er oftest listet i starten af et afsnit. Forsøgsdelen består af en række test udført på en klopolsgenerator. Forsøgene er foretaget i universitets ellaboratorium. Forsøgsbeskrivelserne findes i appendiks. Desuden fremgår de vigtigste resultater samt formål med hvert forsøg også i de aktuelle afsnit i rapporten. Jakob Holmer Sehested Martin Larsen Lars Grundahl Marie Cecilie Pedersen Linn Laurberg Jensen John Nielsen Ved at underskrive dette dokument bekræfter hvert enkelt gruppemedlem, at alle har deltaget ligeligt i projektarbejdet og at alle er kollektivt ansvarlige for rapportens indhold. 5

6

7 Indholdsfortegnelse Indholdsfortegnelse 7 1 Indledning 9 2 Klopolsgenerator Virkningsgrad for klopolsgenerator Problemformulering 17 4 Ombygning af klopolsgenerator Permanente magneter Dimensionering af permanent magnet Ombygning af klopolsgenerator Variation på udgangsspænding fra ombygget klopolsgenerator Konverteren DC-DC konvertere Steady-state analyse Udledning af små-signal ligninger Bestemmelse af komponenter Udledning af overføringsfunktion for konverter Regulering Regulator design Realisering af kontrolenhed Sammenligning Oprindelig og ny generator Konklusion 77 9 Perspektivering Kommentarer til projektet Forbedring af bilers effektivitet Tidshorisont Litteratur 85 A Forsøgs Journaler 87 A.1 Forsøgsopstilling A.2 Forsøg 1 - Klopolsgeneratorens virkningsgrad

8 INDHOLDSFORTEGNELSE A.3 Forsøg 2 - Bestemmelse af maksimal spænding til konverter A.4 Forsøg 3 - Bestemmelse af magnetisk flux vha. back-emf A.5 Forsøg 4 - Bestemmelse af modificeret generators udgangsspænding og virkningsgrad 101 A.6 Forsøg 5 - Bestemmelse af modificeret generators virkningsgrad B Appendiks - Udstyrsliste 109 C Designprocedure for regulator 111 D Spole 115 E Datablad neodym magnet 121 8

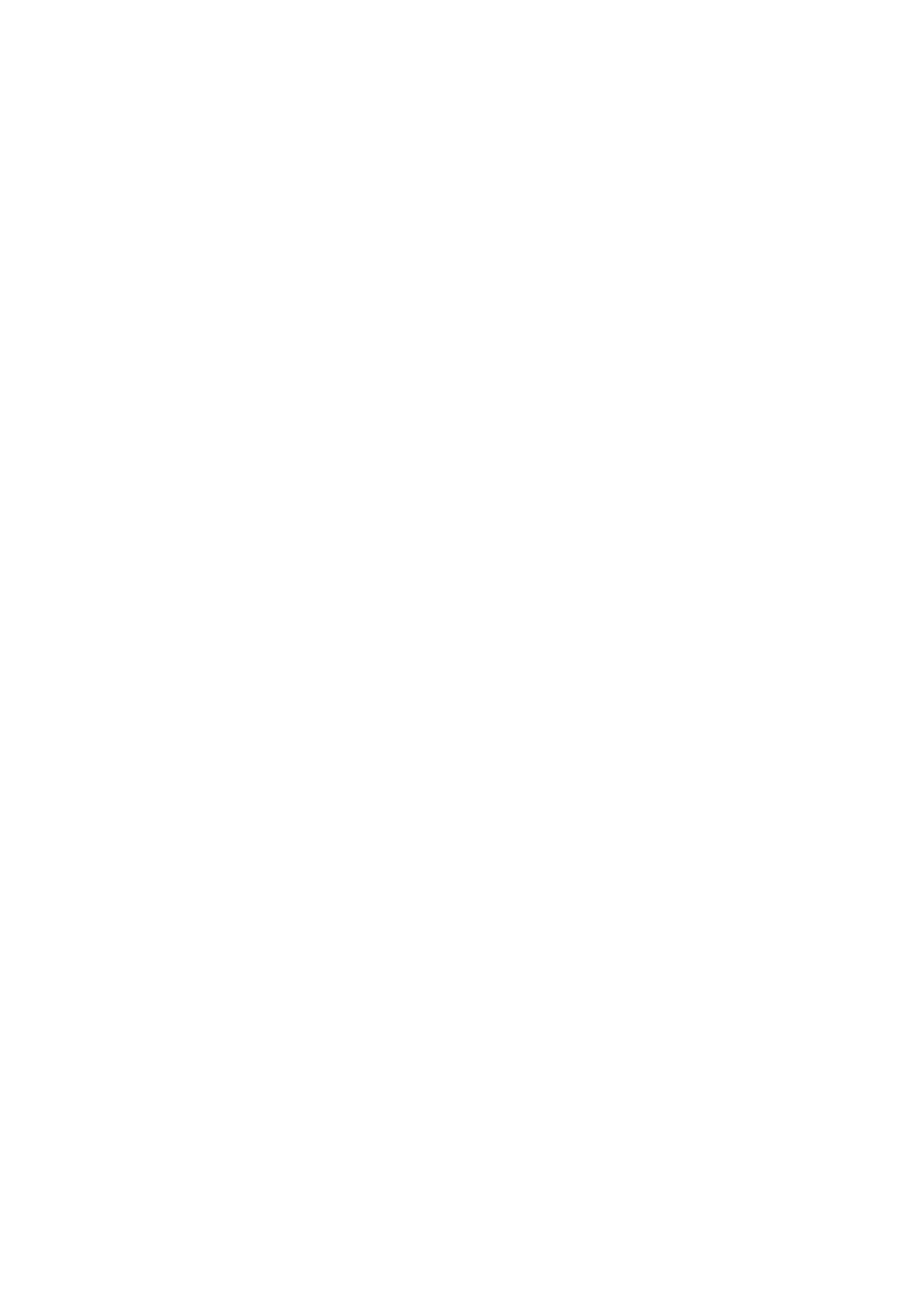
9 Kapitel 1 Indledning Bilen er et vigtig transportmiddel i det moderne samfund. De benyttes dagligt til gods- og persontransport. Antallet af personbiler i danmark har været stigende, det ses bl.a. på figur 1.1 som viser udviklingen i antallet af personbiler i Danmark fra Bilerne er med til at øge mobiliteten i samfundet og er for mange uundværlig i hverdagen. Figur 1.1: Antallet af personbiler i Danmark, opgjort pr. 1. januar i antal [Statistikbanken.dk, 2009]. Indenfor bilindustrien opleves en konstant udvikling af bilerne på det tekniske område. I forhold til dette projekt kan nævnes to overordnede retninger, hvor der sker stor udvikling. Den første er, at bilerne skal kunne køre længere pr. liter brændstof; både for at sikre en god økonomi i kørslen og for at minimere udledningen af skadelige stoffer fra udstødningen. Den anden vigtige retning er, at bilerne skal være mere komfortable og sikre at køre i. Udviklingen indenfor disse retninger medfører, at der kommer mere elektronik i bilerne og dermed større elforbrug. Figur 1.2 viser udviklingen i brændstofforbruget for personbiler. EU har fastlagt et mål, som betyder at benzinbiler skal kunne køre ca. 20 km/l og dieselbiler ca. 22,2 km/l senest i år 2010 [Færdselsstyrelsen, 2004]. For at sikre, at bilerne kører længere pr. liter brændstof arbejdes med optimering af enkeltdele. Det er bl.a. aerodynamikken, samt motorens forskellige dele, der udvikles, så de bliver mere effektive. Den nye elektronik i biler findes i mange udformninger. Der er systemer, som gør bilerne mere sikre og lettere at køre; herunder hører bl.a. ABS, ESP og elektronisk styrede undervogne. Derudover findes systemer, der gør bilen mere behagelig at benytte her kan nævnes; klimaanlæg, onboard compu- 9
![1: Antallet af personbiler i Danmark, opgjort pr. 1. januar i antal [Statistikbanken.dk, 2009]. Indenfor bilindustrien opleves en konstant udvikling af bilerne på det tekniske område.](/docs-images/41/15373985/images/page_9.jpg "I forhold til dette projekt kan nævnes to overordnede retninger, hvor der sker stor udvikling. Den første er, at bilerne skal kunne køre længere pr.")

10 KAPITEL 1. INDLEDNING ter, elopvarmede sæder og sidespejl samt diverse underholdsnings systemer. Desuden er styringen af motoren i mange biler blevet elektronisk. Figur 1.2: Udvikling for km pr. liter for personbiler. Udviklingen for dieselbiler begrundes med, at det især er større og tungere dieselbiler, der sælges [Færdselsstyrelsen, 2007]. Generatoren drives af motoren og har derved indvirkning på begge retninger. For at optimere brændstoføkonomi mv. er det derfor vigtigt at mindske belastningen på motoren. Samtidig skal generatoren producere nok elektricitet til at alle systemer i bilen kan fungere og batteriet kan lades op. For at lave nok strøm, med mindst mulig belastning, skal generatoren være så effektiv som mulig. Klopolsgeneratoren (Lundell-generatoren) er en fast del i alle køretøjer med forbrændingsmotor i dag, og har været det gennem de sidste år [Emadi, Ehsani, Miller, 2004]. Gennem denne årrække er generatoren blevet optimeret og tilpasset, så den fylder mindst muligt i motorrummet, samtidig med at virkningsgraden er blevet forbedret. På trods af det, er virkningsgraden stadig kun 40-55% [Whaley, Soong, Ertugrul, 2004]. Klopolsgeneratorer laves i størrelser op til 5 kw og hastigheder på op til RPM [Boldea, 2006]. For at undersøge, hvordan genereringen af strøm i køretøjer kan forbedres, er det nødvendigt at forstå, hvordan klopolsgeneratoren er opbygget, og hvordan den virker. Dette vil blive beskrevet i kapitel 2. 10

11 Kapitel 2 Klopolsgenerator I dette kapitel bliver klopolsgeneratoren og dens virkemåde beskrevet. Afsnittet danner baggrund for det videre arbejde med klopolsgeneratoren Klopolsgeneratorens opbygning En klopolsgenerator er en synkron vekselstrømsgenerator. Klopolsgeneratoren er opbygget af en stator, der omkranser rotoren, som er den roterende del i generatoren. De to dele er lukket inde i statorhuset for at beskytte omgivelserne fra de roterende dele og for at undgå snavs i generatoren. I den ene ende sidder en blæser, der køler generatoren. Denne er efterfulgt af en remskive, som via en kilerem forbinder bilens forbrændingsmotor til generatoren. På figur 2.1 ses de omtalte dele fra en adskilt klopolsgenerator. Alle illustrationer af klopolsgeneratoren stammer fra en klopolsgenerator til en Toyota Corolla årg , med en maksimal udgangseffekt på 751 W. Denne type generator benyttes i projekt arbejdet. Figur 2.1: Den adskilte klopolsgenerator med angivelse af de forskellige dele. Statoren består af en cylindrisk jernkerne med noter hele vejen rundt. Normalen, for generatorer til biler, er én not pr. pol pr. fase. For en trefaset vekselstrømsgenerator med 12 poler i rotoren vil det sige, at der er 36 noter i statoren [Boldea, 2006]. I hver not ligger viklinger, så der dannes en række af spoler hele vejen rundt i statoren. Viklingerne er forbundet til dioder, der ensretter den genererede vekselspænding fra statoren. Dioderne er forbundet til to terminaler, hvorfra den genererede ensrettede strøm kan ledes videre til batteriet, se figur


12 KAPITEL 2. KLOPOLSGENERATOR Figur 2.2: Statoren fra klopolsgeneratoren set fra hver side. Den ende, hvor der påføres mekanisk arbejde på akslen, kaldes driv-ende. Rotoren består af to jernkerner, der hver har seks poler, der er udformet som klør - heraf navnet klopol. Begge jernkerner er presset sammen om en spole med 506 viklinger, som tilføres jævnstrøm via to kul, der har kontakt til to slæberinge på rotoren. Se figur 2.3. Figur 2.3: Rotor fra klopolsgenerator. Slæberingene gør det muligt at lede strøm til rotoren, selvom den roterer. Det betyder samtidig, at der vil være vedligehold på generatoren, da kullene slides og skal udskiftes, når de ikke længere har ordentlig forbindelse til slæberingene Klopolsgeneratorens virkemåde Når en leder befinder sig i et varierende magnetisk felt, vil der induceres en spænding i lederen, som trækker en strøm. Strømmen afhænger af lederkredsens impedans og hastigheden, hvormed feltet passerer lederen, hvilket fremgår af formel 2.1. Formlen gælder for en leder i et konstant felt, men gælder også for en leder i et varierende felt [Jewett, Serway, 2008]: 12

 Hvor: F e Kraftpåvirkning af en elektron i lederen [N ] B Magnetisk fluxtæthed v Hastigheden hvormed feltet passerer lederen [ m ] s q Ladningen af en elektron [C ] [ W b m 2 = T ] På")
13 F e = B v q (2.1) Hvor: F e Kraftpåvirkning af en elektron i lederen [N ] B Magnetisk fluxtæthed v Hastigheden hvormed feltet passerer lederen [ m ] s q Ladningen af en elektron [C ] [ W b m 2 = T ] På vektordiagrammet, figur 2.4, ses retningen af kraften ( F e ) i forhold til retningen på feltet ( B) og hastigheden ( v). Krydserne illustrerer at B-feltet peger ind i papiret. Figur 2.4: Illustration af vektorernes retning fra formel 2.1 i forhold til hinanden. Når hastigheden stiger, øges kraftpåvirkningen på elektronerne i viklingerne i statoren. Det medfører, at der løber en større strøm i viklingerne, da strøm er defineret som ladninger pr. sekund. Strømmen, der løber gennem lederen, kan beskrives vha. Laplaces lov [Jewett, Serway, 2008]: F l = B l I I = F l B l (2.2) Hvor: F l Kraftpåvirkning af lederen [N ] I Strøm [A] l Længde af leder [m] Fra feltet i rotoren påvirkes viklingerne i statoren af en varierende magnetisk kraft, når rotoren roterer. Denne kraft frembringer en strøm i viklingerne, som det fremgår af formel 2.2. Yderligere beskrivelse af Laplaces lov findes i afsnit Kraften af det magnetiske felt kan beskrives vha. linier, der symboliserer en magnetisk strømning og kaldes fluxlinier. På figur 2.5 ses, hvordan fluxen løber fra midten af jernkernen i spolen i rotoren og rundt i jernkernen, til den når en klopol. Fra klopolen springer fluxen over i statoren og derefter til den nærmeste klopol med modsat polaritet. Herfra løber fluxen tilbage til udgangpunktet i jernkernen midt i spolen. Det skal bemærkes, at figur 2.5 viser halvdelen af to klopoler. 13

14 KAPITEL 2. KLOPOLSGENERATOR Figur 2.5: Udsnit af rotor med illustration af løberetning for den magnetiske flux gennem to af generatorens klopoler. I området ud for klopolerne vil viklingerne i statoren blive påvirket af den magnetiske flux fra rotorfeltet der springer fra pol til pol. Det er variationen i fluxen, der inducerer en spænding i viklingerne og får en strøm til at løbe, se yderligere beskrivelse i afsnit 4. Da der er tre sæt viklinger for hver par af nord- og sydklopol, bliver viklingerne kun udsat for maksimal magnetisk påvirkning en tredjedel af tiden. Dette, samt måden hvorpå viklingerne ligger i statoren, skaber den vekselvirkende effekt, der genererer 3-faset vekselstrøm. Da batteriet i personbiler skal bruge jævnstrøm, sidder der seks dioder indbygget i generatoren. Dioderne leder skiftevis vekselstrømmen til en fælles pluspol. På figur 2.6 ses princippet i en ensretter. Dioderne gør at der kun ledes strøm til plus-siden af batteriet. Figur 2.6: Principtegning af en ensretters opbygning. Ifølge formel 2.1 vil kraften på elektronerne i viklingerne stige, når hastigheden, hvormed rotorfeltet passerer viklingerne, stiger. Derved løber en større strøm, og ifølge Ohms lov vil det øge udgangsspændingen. En strømregulator styrer, hvor stor en strøm, der tilføres til spolen i rotoren via slæberingene. Rotorens omdrejningstal er omvendt proportionalt med den strøm, regulatoren lader løbe til spolen. Regulatoren måler udgangsspændingen fra generatoren og sammenligner den med en referencespænding, 14

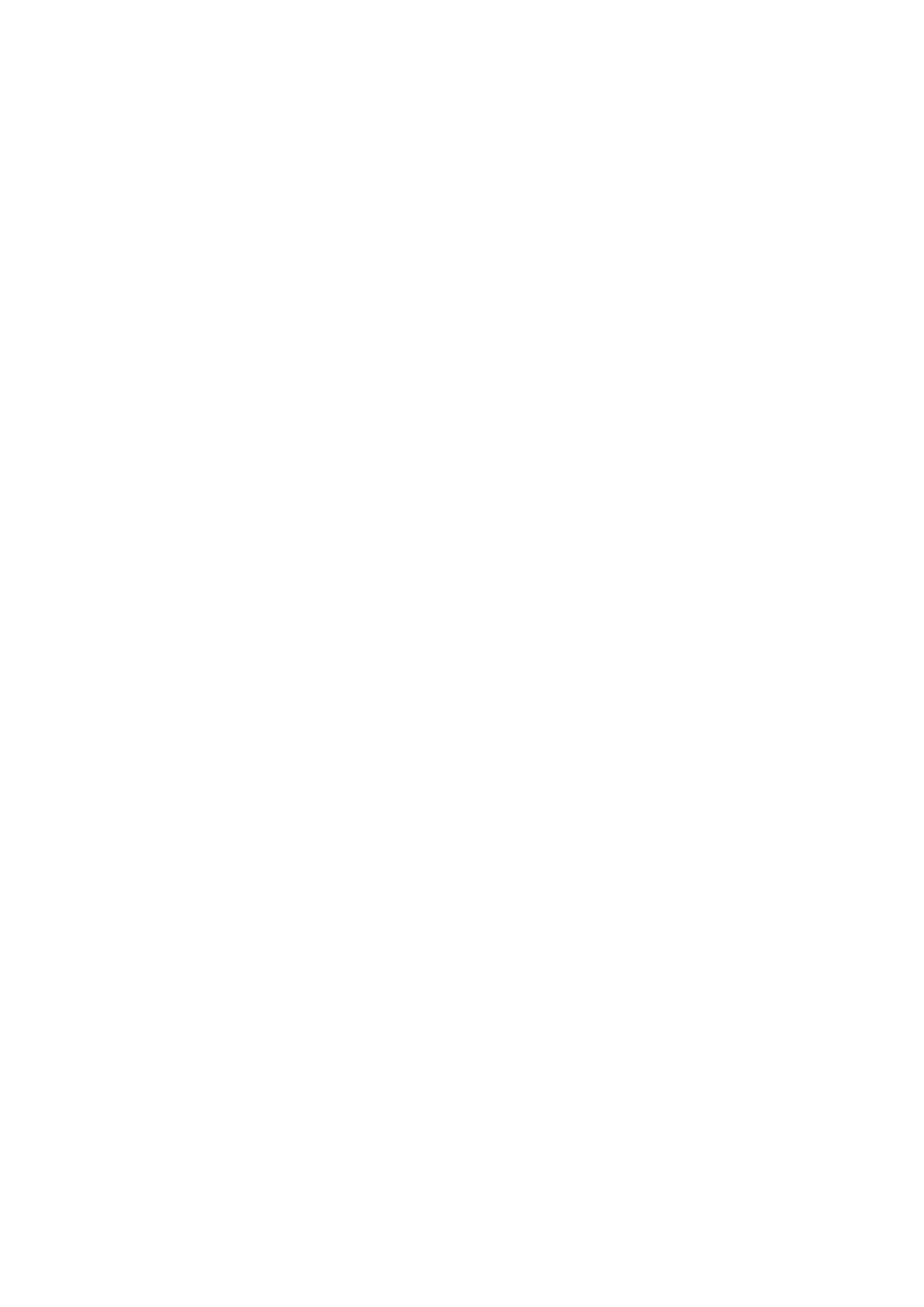
15 2.1. VIRKNINGSGRAD FOR KLOPOLSGENERATOR hvorefter strømmen til rotoren reguleres vha. PWM (Pulse-Width-Modulation). Hvis strømmen til rotoren ikke bliver reguleret vil udgangsspændingen blive meget høj. Ved tomgang (ca RPM) er udgangsspændingen 14 V, men den øges lineært med hastigheden, som det fremgår af formel 2.3. [Emadi, Ehsani, Miller, 2004]. Hvor: V Spænding [V ] [ ] ω aktuel Hastighed på rotor r ad s ω tomg ang Tomgangshastighed [ ] r ad s V = ω aktuel ω tomg ang 14 (2.3) Klopolsgeneratorens fordele og ulemper Fordelene ved klopolsgeneratoren stammer fra dens mangeårige benyttelse, hvorved den er blevet meget billig at producere. Dens forholdsvis simple design og sparsomme brug af elektriske komponenter gør den billig, enkel og meget stabil. På grund af det store antal poler i rotoren opnås en mere jævnt genereret spænding efter ensretningen af strømmen. Dermed spares yderligere udjævning af strømmen. Det simple design gør derimod også generatoren meget ineffektiv. Med en effektivitet på 40-55% ligger den langt fra de fleste andre typer generatorer. Størrelsesmæssigt er den også begrænset til omkring 2 kw for at der er plads til den i motorrummet på en alm. personbil. Potentialet for at forbedre virkningsgraden for klopolsgeneratoren er derfor forholdsvis stort. Da den teknologiske udvikling i bilbranchen kan forventes at fortsætte, vil det i fremtiden blive endnu mere nødvendigt med effektive generatorer. Dette er nødvendigt for at opfylde kravet om øget behov for elektrisk energi i bilerne, samt mindre belastning af bilens motor, så brændstofforbruget påvirkes mindst muligt. En måde at lave denne forbedring på kunne være, at udskifte spolen i rotoren i klopolsgeneratoren med en permanent magnet og efterfølgende regulere udgangsspændingen. For at fastslå virkningsgraden for klopolsgeneratoren laves en test i laboratoriet. Hensigten med testen er at vise potentialet for en forbedring af den anvendte klopolsgenerator. 2.1 Virkningsgrad for klopolsgenerator For at finde virkningsgraden for klopolsgeneratoren er der blevet foretaget et forsøg, som er beskrevet i appendiks A.2. I forsøget måles den mekaniske effekt, der driver generatoren, og sammenholdes med den elektriske effekt ud af generatoren. Da generatoren bruger elektrisk energi til at magnetisere spolen i rotoren, lægges denne magnetiseringseffekt til den mekaniske effekt ind i generatoren. Forsøget er foretaget på samme type generator, som er blevet beskrevet og illustreret i afsnit 2. I forsøget er virkningsgraden målt ved forskellige hastigheder, ladespændinger og effekt. På figur 2.7 ses en graf over virkningsgraden som funktion af omdrejningstallet ved forskellige ladespændinger. 15
![1000 RPM) er udgangsspændingen 14 V, men den øges lineært med hastigheden, som det fremgår af formel 2.3. [Emadi, Ehsani, Miller, 2004].](/docs-images/41/15373985/images/page_15.jpg "Hvor: V Spænding [V ] [ ] ω aktuel Hastighed på rotor r ad s ω tomg ang Tomgangshastighed [ ] r ad s V = ω aktuel ω tomg ang 14 (2.3) 2.0.")
16 KAPITEL 2. KLOPOLSGENERATOR Figur 2.7: Virkningsgraden for generatoren ved forskellige omdrejningstal. Den gennemsnitlige virkningsgrad for de fire test er beregnet til 36 %. Da kørselsmønsteret for en almindelig personbil er ukendt, er det vanskeligt at finde den gennemsnitlige virkningsgrad for generatoren, når den benyttes ved normal drift i en personbil. Derfor benyttes 36 % som udgangspunktet for senere sammenligning. Da en permanent magnet generator har virkningsgrader på omkring 85 %, [Ritchie, 2009] er der et meget stort potentiale for at forbedre den testede klopolsgenerator. 16

17 Kapitel 3 Problemformulering Med det stigende elforbrug i moderne biler og et øget krav til brændstoføkonomien er der god grund til at undersøge, om den eksisterende løsning, med klopolsgeneratorer, kan forbedres. Dette leder frem til problemformuleringen: Hvilken virkningsgrad har en klopolsgenerator, hvor spole-feltet er udskiftet med permanente magneter? Og hvordan kan udgangsspændingen kontrolleres? Der tages udgangspunkt i klopolsgeneratoren og dens egenskaber vha. forskellige forsøg, se appendiks A. Virkningsgraden af klopolsgeneratoren bestemmes vha. en teststand. Det undersøges, hvordan klopolsgeneratoren skal ombygges, for at spolen kan udskiftes med en permanent magnet. Dernæst ombygges klopolsgeneratoren og permanent magnet indsættes. Efterfølgende ses på en konverter, der skal sørge for, at der leveres en konstant spænding til bilbatteriet. Ydermere udledes en overføringsfunktion for konverteren, som vha. regulering bliver tilpasset systemet. Der designes en PI-lead regulator. Konverter samt regulator ønskes bygget og kobles sammen med den ombyggede klopolsgenerator. Det nye system integreres i teststanden. På standen foretages et forsøg, hvor virkningsgraden af det nye system bestemmes. Testsresultater fra det nye system sammenlignes med resultater fra det oprindelige system. 17

18
19 Kapitel 4 Ombygning af klopolsgenerator Kapitlet har til hensigt at gøre det klart, hvilke ændringer der foretages i den oprindelige klopolsgenerator og hvilke konsekvenser ændringerne vil medføre. Kapitlet er opbygget med et indledende teoriafsnit omkring permanente magneter og magnetfelter generelt. Herefter følger et afsnit, hvor størrelsen af den permanente magnet, der skal erstatte spolen i rotoren, beregnes. Heri vil indgå et forsøg, som skal hjælpe med at fastslå den magnetiske flux som løber i jernkernen i rotoren og statoren. Ydermere vil det fremgå, hvilke konsekvenser udskiftningen har for det samlede system, når den ombyggede generator skal forsyne et bilbatteri. Udgangsspændingen i PM-generatoren vil variere med omdrejningstallet i rotoren, fordi det magnetiske felt fra jernkernen i rotoren nu vil have en konstant styrke. Derfor vil der afslutningsvis blive foretaget en test, som skal vise hvilket område udgangsspændingen fra PM-generatoren varierer over. Forsøget foretages dels for at fastslå nødvendigheden af kontrollering af udgangsspændingen, men også for at kende variationsområdet for udgangsspændingen, som en passende konverter skal designes ud fra. 4.1 Permanente magneter Den første praktiske anvendelse af permanente magneter var i kompas, der blev introduceret i Europa fra Kina i 1200-tallet. I 1800-tallet blev en række love til anvendelse af magnetisme grundlagt, bl.a. af den britiske fysisker Michael Faraday. Der er siden 1940 erne set en stor udvikling i brugen af magnetisme og i dag er det muligt at anvende magnetisme i energiomsættende systemer, som motorer og generatorer. Beskrivelsen af permanente magneter i dette afsnit har til hensigt at give en grundlæggende viden om emnet, da denne viden benyttes efterfølgende i rapporten. Permanente magneters egenskaber Generelt har alle magneter et magnetisk felt omkring sig. Magnetfeltet indikeres af magnetfeltlinierne, som er illustreret af de blå pile på figur 4.1. Mellem to magneter eksisterer en magnetisk kraft, idet magneterne vekselvirker med hinanden. Ethvert materiale, som kan magnetiseres, betegnes som magnetisk og bliver magnetiseret, hvis det placeres i et magnetisk felt. Sådanne materialer kaldes ferromagnetiske materialer. Skabes det magnetiske felt ved bevægelse af ladninger kaldes det elektromagnetisme. I magneterne findes to poler; nordpolen, der er den nordsøgende pol, og sydpolen, der er den sydsø- 19

20 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR gende pol. Af magnetismens 1. lov fremgår, at to ens poler vil frastøde hinanden, mens to forskellige poler vil tiltrækkes af hinanden. Dette er illustreret på figur 4.1. Figur 4.1: a) To frastødende poler, her to nordpoler. b) To tiltrækkende poler; en syd- og en nordpol [Emu.dk, 2008]. Materialer Magneter laves af ferromagnetisk materiale. Det kan være materialer som jern, nikkel, cobolt eller legeringer af disse materialer. Materialerne kan deles op i to katagorier, der ofte betegnes som blødt eller hårdt ferromagnetisk materiale. Det hårde materiale kan eksempelvis være stål, som er svært at magnetisere. Til gengæld bibeholder hårde ferromagnetiske materialer magnetiseringen og er svære at afmagnetisere. Modsat er bløde ferromagnetiske materialer som jern nemme både at magnetisere og afmagnetisere, og er derfor svage magneter. Denne forskel fremgår på hysteresekurverne for de to katagorier af ferromagnetisk materiale. Det ses af graferne på figur 4.2, at arealet omkranset af kurven er større for hårde materialer, end arealet for bløde materialer. Figur 4.2: Hysteresekurver; til venstre ses hysteresekurven for et hårdt ferromagnetiske materiale, til højre ses hysteresekurven for et blødt ferromagnetisk materiale. De ferromagnetiske materialer består af dipoler, der hele tiden påvirker hinanden. Dipolerne befinder sig i områder, som kaldes domæner. Indenfor domænerne peger alle dipolerne i samme retning, mens domænerne ligger i uorden, som illustreret på figur 4.3 a. Idet det ferromagnetiske materiale bliver magnetiseret, vil domænerne og de tilhørende dipoler pege i samme retning, hvilket fremgår af figur 4.3 b. Et ferromagnetisk materiale siges at være neutraliseret, når domænerne ligger i uorden, som på figur 4.3 a. Derimod opnår det ferromagnetiske materiale sin største magnetiske kraft, når domænerne og dipolerne ligger i perfekt orden. Placeres det ferromagnetiske materiale i et magnetisk felt, vil den magnetiske kraft induceres, når dipolerne forsøges orienteret i samme retning af det magnetiske felt. 20

21 4.1. PERMANENTE MAGNETER Figur 4.3: a) Neutralt materiale med domænerne i uorden. b) Magnetiseret materiale med domæner og dipoler i samme retning. c) Inducering af den magnetiske kraft [Emu.dk, 2008]. Hysterese karakteristik De permanente magneternes egenskaber kan beskrives vha. en hysterese kurve, en såkaldt BH karakteristik. Karakteristikken beskriver sammenhængen mellem fluxens densitet, der også er kendt som B-feltet og den magnetiske feltstyrke, kendt som H-feltet, hvor B H Fluxdensitet Magnetisk feltstyrke [ ] W b [ m 2 ] Am BH-karakteristikken repræsenterer en cyklisk ændring i den magnetiske fluxtæthed som funktion af ændringen i den magnetiske kraft. På figur 4.4 ses hysteresekurven under en magnetiseringsproces. Hysteresekarakteristikken opstår, når det magnetiske materiale gennemgår en hel cyklisk proces bestående af både magnetisering og afmagnetisering. Figur 4.4: Magnetiseringsprocessen for en permanent magnet illustreret vha. af en BH-karakteristik [Basak, 1996]. 21
22 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR Nedenfor er listet, hvad de forskellige punkter på figur 4.4 repræsenterer: O: Det neutrale stadie for materialet. Det er her magnetiseringsprocessen starter OACD: Begyndelsesmagnetiseringskurven AEFGHIA: Hysteresekurve opnået under en magnetiseringscyklus. Materialet er ikke fuldt magnetiseret og har derfor endnu ikke nået sit mætningspunkt C: Magnetisk mætning af materialet. Den magnetiske mætning opnås når magneten/materialet bidrager mindre til flux densiteten E og J: Værdi af B, når H = 0. Den remanente magnetisering. Kaldes også remanensen og er den fluxdensitet, der vil blive tilbage i jernet, når magnetiseringen fjernes F og K: Værdi af H, når B = 0. Den koersive kraft. Kan opfattes som den modsatrettede magnetisering. Det vil sige, at det er den magnetisering, som kræves for at fjerne remanensen Idet materialet er magnetiseret til dets mætningspunkt, B sat, svarer punktet J til materialets magnetiseringsstadie, hvor magnetiseringskraften er nul. Værdien af flux densiteten i punktet J kaldes også for den remanente flux densitet B r. Formen på hysteresekurverne fortæller om materialets magnetiseringsproces. Arealet indenfor grafen er et mål for energitabet i det magnetiserede materiale under den cykliske magnetiseringsproces. På graferne på figur 4.2 ses hysteresekurverne for to materialer. Generelt gælder for smalle hysteresekurver, at materialet har en højere permeabilitet, mens remanensen, den koersive kraft, og reluktansen er lav. Modsat er det gældende for brede hysteresekurver, at permeabiliteten er lav, mens remanensen, den koersive kraft og reluktansen er høj for materialet. En egentlig magnetiseringsproces vil ideelt se ud som grafen til højre på figur 4.5. Figur 4.5: Til venstre ses grafen for magnetisering uden hysterese eller mætning for magnetiseringen af et materiale. Til højre ses en magnetiseringskurve uden hysterese [Erickson, Maksimovic, 2004]. Sammenhængen mellem de to felter beskrives af ligning 4.1: B = µ H (4.1) µ er en mediekonstant, der findes som produktet mellem den relative permeabilitet og vakuumpermeabiliteten: µ = µ r µ 0 (4.2) 22
23 4.1. PERMANENTE MAGNETER Hvor: [ Hm ] µ Permeabilitet µ 0 Vakuumpermeabilitet, 4π 10 7 [ ] H [ ] m µ r Relativ permeabilitet Hm Permeabiliteten er en materialeegenskab, og er et udtryk for, hvor godt et materiale er til at lede et magnetisk felt. Vakuumpermeabiliteten har en konstant værdi, mens den relative permeabilitet afhænger af materialet. Permeabiliteten er forholdet mellem B og H feltet og er beskrevet ved følgende ligning: µ = B H (4.3) Ligningen beskriver derudover hældningen på hysteresekurven Magnetiske kredsløb Magneter anvendes ofte til at frembringe en høj fluxtæthed B i en begrænset del af rummet. Et magnetisk kredsløb kan magnetiseres vha. en strømspole med vindingstallet n og en given strøm i. Der kan i kredsen indlægges snævre luftgab. Ofte er kredsløb sammensat som en kerne af materiale med høj permeabilitet, hvor jern eller jernlegeringer ofte anvendes. Et eksempel på et magnetisk kredløb er en spole, der ses på figur 4.6. Figur 4.6: Magnetisk kredsløb med strømspole [Erickson, Maksimovic, 2004]. I det magnetiske kredsløb, er der en modstand både fra materialet og luftgabet. Denne modstand begrænser fluxen i at løbe og kaldes reluktans. Derfor omsættes det magnetiske kredsløb til følgende analoge elektriske kredsløb, der vises på figur 4.7, [Erickson, Maksimovic, 2004]: R Reluktans = R Modstand Φ Flux = I Strøm F Magnemotorisk kraft = V Spændingspotentiale over modstand 23
24 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR Figur 4.7: Magnetisk kredsløb analogt til figur 4.6. Reluktansen for materialer er defineret som ligning 4.4: R = l µ A c (4.4) Hvor: [ ] A W b R Reluktans l Magnetiskmiddelvejlængden [m] [ A c Tværsnitsarealet m 2 ] [ ] µ Permeabilitet Hm For kredse bestående af både kerne og luftgab, findes den samlede reluktans som summen af reluktanserne. Det vil sige, at for det magnetiske kredsløb på figur 4.6 findes den samlede reluktans som: R tot al = R c +R g = l µ A c + h µ 0 A c (4.5) Den magnetiskemiddelvejlængden for kernen skal i reluktansen for luftgabet, erstattes med højden h på luftgabet. Der regnes ofte med en mindre arealforøgelse i luftgabet på ca. 10% [Ebert, 1998]. Da µ 0 ofte er meget større end µ, vil selv et snævert luftgab ofte give hovedbidraget til den samlede reluktans. Generelt kan magnetiske kredsløb betragtes som almindelige elektriske kredsløb, hvor reluktansen som nævnt svarer til resistansen. Andre elementer i elektriske kredsløb som strøm og spænding svarer hhv. til flux og den magnemotoriske kraft (MMF). Det betyder, at magnetiske kredsløb kan regnes på vha. kendte metoder fra elektrisk kredsløbsteori som Kirchoffs love og superpositionsmetoden. Samlet for magnetiske kredsløb kan det konkluderes at følgende analoge relation er gældende: EMF = I R MMF = Φ R (4.6) Ligning 4.6 svarer til Ohms lov. 24
25 4.1. PERMANENTE MAGNETER Magnemotorisk kraft Den magnemotoriske kraft danner den magnetiske flux og er analog til spændingen eller den elektromotoriske kraft i elektriske kredsløb. Den magnetiske flux måles i weber [W b] og er givet ved: Φ = B A c (4.7) Den magnemotoriske kraft MMF, mellem to punkter, x 1 og x 2 i et element er defineret som: M MF = F ˆ= x2 x 1 H dl (4.8) Hvor dl er vektorlængden, pegende i retning af middelvejlængden. Det vil sige, at MMF mellem to punkter i et element er givet ved: F = H l og F = ni (4.9) Hvor F = ni er gældende for en spole. Da H = B µ og B = Φ A c kan MMF udtrykkes ved: Da F = l µ A c = R i ligning 4.10 kan dette udtryk reduceres til: l µ A c Φ (4.10) F = Φ R (4.11) Da F = ni, svarer den magnemotoriske kraft også til spændingsfaldet over reluktanserne på figur 4.7. Ligning 4.11 er analog til den kendte Ohms lov for elektriske kredsløb Magnetismens love Indenfor magnetismen findes en række love, der kan benyttes til bestemmelse af bl.a. den magnemotoriske kraft og den elektromotoriske kraft. I dette underafsnit følger en kort beskrivelse af de gældende love. Lenzs lov Når en leder befinder sig i et varierende magnetisk felt, vil der induceres en spænding i lederen og en strøm vil begynde at løbe. Denne spænding kaldes den elektromotoriske kraft (EMF). Lenzs lov siger, at hvis styrken af det varierende magnetiske felt stiger, vil strømmen i lederen være negativ. Falder styrken af det magnetiske felt, vil strømmen derimod være positiv. Ifølge Lenzs lov vil EMF prøve at modvirke ændringen af styrken i det magnetiske felt. A I B C D Figur 4.8: Illustration til brug ved forklaring af Lenzs lov. To ledere hvor den yderste påsættes en spænding. 25
26 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR Når der løber en strøm gennem modstanden fra A til B, skabes der et magnetisk felt omkring lederen med den angivne retning, se figur 4.8. Hvis strømmen varierer vil dette felt inducere en spænding (EMF) i en leder, som befinder sig i feltet. Den inducerede EMF vil skabe en strøm, der vil løbe i positiv eler negativ retning fra C til D alt efter om strømmen i den ydre leder stiger eller falder. Falder strømmen fra A til B, bliver feltet omkring lederen mindre, og dermed vil strømmen i den indre leder løbe fra D til C. Omvendt vil strømmen løbe fra C til D, hvis der begynder at løbe en større strøm fra A til B [Jewett, Serway, 2008, Kap. 31]. Amperes lov Af Amperes lov fås relationen mellem elektrisk strøm og magnetisk felt. Loven relaterer strømmen i en vinding til den magnemotoriske kraft og det magnetiske felt H. Den magnetiske feltstyrke H integreret over en lukket kurve giver strømmen gennem den lukkede kurve [Erickson, Maksimovic, 2004]. Heraf er givet, at MMF er: M MF = H dl = J da (4.12) c s Hvor: J Arealstrømmen [ A m 2 ] Notationen c betyder, at der er tale om en lukket sløjfe, mens notationen s betyder, at der er tale om integralet af en overflade. Udtrykket for Amperes lov er også udtrykket for den samlede strøm over middelvejlængden, dvs. MMF = I tot al. Det vil sige, at den magnetiske feltstyrke er lig med den totale omsluttede strøm, hvilket også kan udtrykkes med den såkaldte højrehåndsregel: Grib om lederen med højre hånd med tommelfingeren i strømmens retning - magnetfeltet peger da i fingerspidsernes retning. For en spole gælder følgende højrehåndsregel i kraft af Amperes lov: Fat om spolen med højre hånd, med fingerspidserne i strømmens retning - magnetfeltet peger da i tommelfingerens retning. Faradays lov Ved hjælp af Faradays lov kan sammenhængen mellem det elektriske- og magnetiske felt beskrives. Loven beskriver, hvordan et elektrisk felt rundt i en lukket sløjfe, eksempelvis et stykke ledning, medfører en magnetisk flux. Denne sammenhæng er også virkende den modsatte vej, hvilket vil sige ved induktion; hvis den magnetiske flux gennem en sløjfe ændres, vil dette medføre et elektrisk felt, som får en strøm til at løbe i kredsløbet. Ud fra dette relaterer Faradays lov den inducerede spænding i en vinding til den totale flux, der passerer i vindingen [Erickson, Maksimovic, 2004]. Dette kan udtrykkes som: E MF = E dl = d B da = dφ (4.13) c dt s dt Faradays lov kan benyttes i situationer, hvor der er induktion. Dette ses eksempelvis ved transformere, hvor der findes en gensidig induktion mellem spolerne. Dette vil sige at den opbyggede spænding i den ene spole giver anledning til opbygning af et magnetfelt, der skaber spænding i den anden spole. 26
27 4.2. DIMENSIONERING AF PERMANENT MAGNET Laplaces lov Ved anvendelse af Laplaces lov, kan kraften mellem en leder og magnetfeltet beregnes: Hvor: F Kraftpåvirkning af lederen [N] l Længden af lederen [m] B Magnetisk fluxtæthed I Strømmen [A] [ ] W b m 2 F = I l B (4.14) Hvis en strøm I i en leder af længde l løber vinkelret på et magnetfelt B, vil ledningen påvirkes af en kraft der er vinkelret på l, og er givet ved F. Anvendes lillefinger-reglen kan det bestemmes hvilken retning kraften vil påvirke lederen [Ebert, 1998]. Dette er illustreret på figur 4.9. Lillefinger-reglen lyder som følger: Hold højre hånd med fingrene i strømmens retning og magnetfeltet ind i håndfladen; kraften vil da påvirke i lillefingerens retning Strømforsyning + - N Feltretning F (kraft) S Figur 4.9: Illustration af lillefinger-reglen. 4.2 Dimensionering af permanent magnet I dette afsnit behandles udregningen af størrelsen på den permanente magnet der skal indsættes i rotoren. Størrelsen af fluxen anvendes i beregningerne. Derfor foretages et forsøg på klopolsgeneratoren, som skal fastslå størrelsen af fluxen, der løber fra hver nord- til sydpol på rotoren. Dette gøres ved at måle den genererede modelektromotoriske kraft i en spole som indsættes i statoren. Beregningerne gennemgås vha. en teoretisk og anvendt metode (Metode 1 og 2). Afslutningsvis redegøres for, hvilke konsekvenser udskiftningen af spolen i rotoren med en permanent magnet har, og hvilke konstruktionsmæssige tiltag der skal gøres. Der udføres yderligere et forsøg, der har til hensigt at vise variationen i udgangsspænding når omdrejningstallet ændres. Teorien i hele afsnittet stammer fra [Sen, 1997], med mindre anden kilde er angivet i teksten. For at dimensionere den permanente magnet, skal der gøres nogle overvejelser; 1. Det er valgt at fluxen, der løber gennem rotor og stator, skal tilnærmelsesvis have den samme værdi som før ændringen. 2. Den maksimale strøm der løber gennem spolen i rotoren er før ombygningen 3 A. Da denne strømstyrke mindskes af regulatoren på generatoren når hastigheden på rotoren stiger, vil det give en alt for stor udgangseffekt, hvis permanent magneten dimensioneres efter denne strøm. 27
28 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR Da generatoren givetvis er designet så jernkernen i rotoren kommer meget tæt på mætning for en magnetiseringsstrøm på 3 A, er det nødvendigt at benytte en lavere strøm til beregning af en ækvivalent magnetisk flux. 3. I beregningerne er der ikke taget hensyn til tab i generatoren, som f.eks. kobbertab, eddystrømstab og lækage-flux. Magnetisk kredsløb For at beregne størrelsen af den permanente magnet, beregnes B- og H-feltet i luftgabet i generatoren, uden at generatoren er belastet. For at kunne regne på de magnetiske felter opstilles et magnetisk ækvivalent kredsløb bestående af: rotor, luftgab og stator. Det magnetiske kredsløb for rotor, luftgab og stator ses på figur 4.10a. Figur 4.10: Magnetisk kredsløb til brug i beregningerne. Kredsløb (a) gælder for rotor, luftgab og stator, mens kredsløb (b) ikke medtager reluktansen i rotor og stator. På figur 4.10 findes følgende parametre for det magnetiske kredsløb: R s [ ] A W b ] Reluktans i stator R g Reluktans i luftgab [ A R r [ W b ] A W b Reluktans i rotor N r i r Rotor A v N s i s Stator A v Da de mest almindelige jernkerner har relative permeabiliteter på mellem [ H m ], bliver reluktansen i luftgabet gange større end reluktansen i både stator- og rotorjernkerne. Derfor ses bort fra disse to reluktanser i udregningerne. Derfor tages udgangspunkt i det magnetiske kredsløb på figur 4.10b. Udfra det magnetiske kredsløb på figur 4.10b fås formel 4.15: Hvor: Φ Fluxen i kredsen [W b] N r Antal viklinger i rotorspole [ ] i r Magnetiseringsstrømmen i spolen i rotoren [A] N s Antal viklinger i statorspole [ ] i s Induceret strøm i stator [A] N r i r = N s i s + Φ R g (4.15) 28
29 4.2. DIMENSIONERING AF PERMANENT MAGNET Teoretisk beregning - metode 1 Ved hjælp af området, der beskriver afmagnetiseringen af permanent magneten på B-H karakteristikken, kan størrelsen af permanent magneten findes. I et datablad for magneten er remanensen (B r ) og den koercive kraft (H k ) angivet. Tegnes en linie mellem disse to punkter, fås grafen for afmagnetiseringen af magneten. På figur 4.11 ses en illustration af hvor linien ligger. Ved mætning går fluxtætheden mod en bestemt værdi, som afhænger af materialet, når den magnetiske feltstyrke går mod uendeligt. Figur 4.11: Lineær kurve der beskriver afmagnetiseringen af permanent magneten. For at designe magneten, udregnes H-feltet i luftgabet når generatoren kører uden belastning. Først findes fluxen, der løber gennem kredsløbet, og da der ikke genereres nogen strøm i statoren bliver udtrykket for kredsløbet således: Reluktansen af luftgabet kan udregnes vha. formel 4.17 N r i r = Φ R g Φ = N r i r R g (4.16) l g R g = µ A k (1 + f ) (4.17) Hvor: R g [ ] A W b Reluktansen i luftgabet f Korrektionsfaktor for areal af luftgab [ ] l g Længden af luftgabet [m] Arealet af klopolen [ m 2 ] A k Arealet af luftgabet er normalt større end arealet af klopolen hvorfra fluxen løber. Det skyldes, at fluxen buer ud, når den løber gennem luftgabet imellem de to jernkerner. Arealforøgelsen af luftgabet i forhold til jernkernens areal ses af formel 4.18: f = 2 l g Ak (4.18) 29
30 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR Det magnetiske ækvivalenskredsløb betegner fluxen, der løber gennem ét polpar. Derfor svarer arealet af jernkernen til arealet af overfladen på én klopol. På figur 4.12 illustreres arealet af klopolen, hvorfra fluxen antages at strømme fra. Figur 4.12: Det røde felt markerer arealet på klopolen hvorfra fluxen strømmer ud i luftgabet og videre i statorkernen. Dimensionerne på rotoren fremgår af figur Figur 4.13: Dimensionerne på jernkernen i rotoren før modificeringen. Alle mål er angivet i mm. Anvendt beregning - metode 2 Fluxen, der løber i kredsen, kan findes ved at indsætte en spole med et kendt antal vindinger i statoren. Når generatoren kører, induceres en spænding i statorspolen; en modelektromotorisk kraft. Udfra spændingen, antallet af vindinger og den elektriske vinkelhastighed kan fluxen beregnes. Metode 2 er benyttet i rapporten, og der er blevet lavet et forsøg, hvor en spole med 4 vindinger er indsat i statoren. Spolen spænder over tre noter, hvilket svarer til 1/12 af hele statoren, som består af 36 noter. Derved spænder spolen over 1/2 sydpol og 1/2 nordpol i rotoren. Se figur

31 4.2. DIMENSIONERING AF PERMANENT MAGNET Figur 4.14: Illustration af fluxens løberetning fra klopolerne. Dette deler statoren i 12 felter, som hver især kun gennemløbes af en positiv eller negativ flux. Når rotoren roterer kan fluxen, der strømmer fra en pol, måles indirekte gennem en måling af back- EMF en over den indsatte spole i statoren. Back-EMF forklares nærmere i afsnit På figur 4.15 ses hvorledes spolen i forsøget er blevet indsat i statoren. Figur 4.15: Billede af spole med fire vindinger, som er blevet indsat i statoren i forbindelse med forsøget. Se appendiks A.4 for beskrivelse af forsøget. Resultaterne ses i tabel Modelektromotorisk kraft Til forklaring af den modelektromotoriske kraft (back-emf), tages udgangspunkt i en elmotor. En elmotor omdanner elektrisk energi til mekanisk arbejde. Ved opstart af en elmotor, vil den have et meget stort energiforbrug, som falder hurtigt igen, når drifthastigheden opnås. Hastigheden fremkommer pga. en balance mellem den tilførte strøm og den inducerede back-emf. Back-EMF induceres, ifølge Faradays lov, se afsnit 4.1.3, i statorviklingerne når rotoren roterer. Her 31
32 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR udsættes viklingerne i statoren for et varierende magnetisk felt, og det vil inducere en spænding i viklingerne. Ifølge Lentzs lov, se afsnit 4.1.3, vil den inducerede spænding virke modsatrettet den til statoren påtrykte spænding. Når motoren sættes i gang, er back-emfén nul. Derfor bliver startstrømmen meget høj, da den kun er begrænset af modstanden i statorviklingerne. Efter opstarten vil hastigheden blive konstant når der opnås balance mellem den tilførte og den inducerede spænding. Forskellen på de to spændinger giver den resulterende spænding og dermed den strøm, som er nødvendig for at trække den gældende belastning ved den givne hastighed. Dette illustreres på figur 4.16 Figur 4.16: Kredsløbet illustrerer sammenhængen mellem back-emf og strømforbrug i en elmotor. På en generator tilføres der ikke strøm til statorfeltet. Her er det kun den inducerede back-emf, som bestemmer udgangsspændingen på generatoren. En ydre kraft, som i dette tilfælde vil være en forbrændingsmotor i en bil, får rotoren til at dreje. Rotationen og det magnetiske felt fra rotoren vil inducere back-emf i statorviklingerne. Den inducerede spænding vil variere med generatorens mekaniske hastighed. Back-EMF en beskrives vha. formel 4.19: Hvor: back-emf = back-emf A cos(ω e t) = dφ d t N x K v (4.19) back-emf Modelektromotorisk kraft (spænding) [V ] back-emf A Amplitude af modelektromotorisk kraft [V ] [ ] ω e Elektrisk vinkelhastighed på rotor r ad s t Tid [s] Φ Flux [W b] N x Antallet af vindinger i indsat statorspole [ ] K v Vindingsfaktor [ ] Vindingsfaktoren skal ganges på udtrykket, fordi fluxen ikke er jævnt fordelt i hele arealet af jernkernen, og tallet er altid mindre end 1. Vindingsfaktoren afhænger af to andre konstanter K d og K p. K d afhænger af om viklingerne er fordelt rundt i jerkernen eller om de er koncentrerede, som i spoler i traditionel forstand. K p afhænger af hvorledes viklingerne er fordelt. Da dette ligger udenfor rapportens omfang, negligeres K v og sættes til en værdi på 1. Beregning af flux Når generatoren kører, udsættes spolen i statoren for et varierende magnetisk felt fra rotoren. Dette betyder at der induceres en varierende back-emf i spolen i takt med klopolernes forbipasseren. 32
33 4.2. DIMENSIONERING AF PERMANENT MAGNET Formel 4.20 beskriver den varierende flux, der løber gennem spolen i statoren: Hvor: Φ Flux [W b] Φ A Amplitude af flux [W b] [ ] ω e Elektrisk vinkelhastighed på rotor r ad s t Tid [s] Φ = Φ A si n(ω e t) (4.20) Ved at differentiere udtrykket i formel 4.20 fås følgende formel: dφ d t = ω Φ A cos(ω t) (4.21) Indsættes formel 4.21 i formel 4.19 giver det formel 4.22, hvor amplituden af fluxen er isoleret på venstre side: Φ A = E MF A N x ω Amplituden af fluxen er den maksimale værdi, og det er den der benyttes til den videre beregning. (4.22) Udregning af arbejdspunkt Fluxen som er beregnet vha. af den målte amplitude for back-emf en, bruges til at udregne fluxtætheden vha. formel 4.23, som er omskrevet af formlen for fluxen, Φ = B A: B g = Φ A g (4.23) Hvor: B g Fluxtæthed i luftgab [ W b A g Areal af luftgab ] m [ 2 m 2 ] Herefter beregnes den magnetiske feltstyrke i luftgabet vha. formlen for permeabiliteten, µ = B H : Hvor: H g = B g µ r µ 0 (4.24) H g Magnetisk feltstyrke i luftgab µ r Relativ permeabilitet (µ r =1 for luft) µ 0 Vakuumpermeabilitet [ Am ] [ Hm ] [ Hm ] Når en permanent magnet indsættes i kredsen i stedet for spolen ændres fortegnende i kredsløbet, da en permanent magnet kredsløbsmæssigt indgår som et passivt element i stedet for et aktivt element, se figur Reelt set er magneten stadig et aktivt element, da det er den der skaber fluxen der løber i kredsen. 33
34 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR Figur 4.17: Magnetisk kredsløb for rotor med permanent magnet, luftgab og stator. Ifølge Kirchoffs spændingslov kan formel 4.25 opskrives for kredsløbet: 0 = H g l g + H m l m + N s i s (4.25) Da generatoren ikke belastes i forsøget, bliver der ikke trukket nogen strøm fra statoren, så i s = 0. Hvorved formel 4.25 kan omskrives til formel Isoleres H m fås en funktion for den magnetiske feltstyrke i magneten: 0 = H g l g + H m l m H m = H g l g l m (4.26) [ Am ] H g Magnetisk feltstyrke i luftgab H m Magnetisk feltstyrke i permanent magnet [ ] Am l g Længde af luftgab [m] l m Længde af permanent magnet [m] Da det er antaget at fluxen skal være den samme efter ombygningen, skal den magnetiske feltstyrke i luftgabet også være den samme. Den beregnede værdi for den magnetiske feltstyrke for magneten bruges derfor til at aflæse en værdi for fluxtætheden på afmagnetiseringskurven for permanent magneten. Udfra ønsket om både en høj B og H værdi vælges en sintret neodym magnet. BH-kurven for den valgte magnettype ses på Kurven på figur 4.18 beskriver afmagnetiseringen af magneten. Den røde stiplede linie viser, hvor der er aflæst. Udfor stregen står hvilken H-værdi der er anvendt til at aflæse, og hvad B-feltet derefter er aflæst til. Kurven er dannet udfra databladet for den pågældende magnet. 34

35 4.2. DIMENSIONERING AF PERMANENT MAGNET Figur 4.18: BH-kurve for permanent magneten af typen sintret Neodym, se appendiks E Når der er blevet aflæst en værdi for fluxtætheden, kan arealet af overfladen af permanent magneten hvorfra fluxen strømmer findes. Arealet udregnes vha. formel 4.27: Hvor: Φ m = Φ g B m A m = B g A g = A m = B g A g B m (4.27) A m A g B g B m Areal af magnet hvor fluxen løber Areal af luftgab Fluxtæthed i luftgab Fluxtæthed i magnet [ m 2 ] [ m 2 ] [ ] W b [ m 2 ] W b m 2 35
36 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR Resultater af beregning De målte værdier fra forsøget med den indsatte spole findes i tabel 4.1. Den gennemsnitlige flux er udregnet i bunden af tabellen. Denne værdi anvendes til udregningen af den magnetiske feltstyrke i luftgabet. Tabel 4.1: Værdier fra forsøg. RPM f [Hz] E MF A [V] ω e [ r ad s ] Φ [Wb] , ,89 0, , ,20 0, , ,66 0, , ,11 0, , ,98 0, , ,14 0, , ,43 0, , ,59 0, , ,19 0, Gennemsnitlig flux: 0, I beregningen af H-feltet indsættes en værdi for længden af magneten, og udfra dette aflæses en værdi for B-feltet, som bruges til at udregne arealet af magneten. Da længden af magneten er begrænset til 28 mm skal arealet af magneten som fluxen gennemløber være 1244 mm 2. Da det ikke var muligt at konstruere rotoren med magneter af denne længde, blev det istedet valgt at anvende cylindriske magneter med en længde på 20 mm. Det resulterer i et nødvendigt areal på 1274 mm 2. På grund af begrænset plads i rotoren, har de anvendte magneter dog kun et samlet areal på 785 mm 2. Disse magneter blev anvendt, da det ikke var konstruktionsmæssigt muligt at opnå et større areal med den samme længde på magneterne, udfra det udvalg af magneter som leverandøren havde på lager. Det svarer til at arealet af magneterne er 38% mindre end hvad det burde. Resultaterne fra beregningen ses i tabel 4.2. Tabel 4.2: Resultater fra beregningen af størrelsen på permanentmagneten. Udregnede og aflæste værdier. B g H g H m l m B m 3,16 W b m A m A m 20 mm 1,127 W b m 2 A m mm 2 36

37 4.3. OMBYGNING AF KLOPOLSGENERATOR 4.3 Ombygning af klopolsgenerator Ombygningen af den oprindelige klopolsgenerator der ses på figur 2.1 i afsnit 2, går ud på, at spolen i rotoren udskiftes med en permanent magnet. Rotoren i den oprindelige klopolsgenerator ses adskilt på figur Figur 4.19: Adskilt rotor før ombygning. En permanent ring magnet skulle have været indsat istedet for spolen omkring jernkernen, men pga. begrænsede muligheder, er der istedet blevet indsat ti mindre, cylindriske permanent magneter. Magneterne er bygget ind i rotoren, så den oprindelige udformning er bibeholdt. På figur 4.20 ses rotorens opbygning efter ændringen. Figur 4.20: Adskilt rotor efter ombygning. Afstanden fra top til bund af jerkernen er stadig ens, men i midten af rotoren er 2,5 mm af begge dele af jernkernen fræset bort, for at skabe et luftgab på 5 mm. Det vil sige at luftgabet i rotoren er 10 gange større end luftgabet mellem rotor og stator. Samtidig udskiftes akslen med en ny i rustfrit stål, som ikke er magnetisk. Derved undgås at fluxen fra magneterne løber gennem akslen. Et afstandsstykke i aluminium er blevet monteret omkring de ti cylindriske permanent magneter, så magneterne ikke udsættes for mekanisk belastning. Magneterne er hver især placeret i 7,5 mm dybe huller i begge jernkerner. De ti magneter er 20 mm høje og 10 mm i diameter. Se billede af den ændrede jernkerne i rotoren på figur 4.21, og en skitse af den ændrede rotor med mål på figur Polariseringen af klopolerne (jernkernen) vil ske på samme måde som før, men nu ved hjælp af permanent magneterne i stedet. 37

38 KAPITEL 4. OMBYGNING AF KLOPOLSGENERATOR Figur 4.21: Den ene del af den ændrede jernkerne i rotoren. Figur 4.22: Skitsetegning af ændringerne i rotoren. Alle mål i mm. 4.4 Variation på udgangsspænding fra ombygget klopolsgenerator For at vide hvilke spændinger konverteren skal kunne klare, er den ombyggede klopolsgenerator blevet testet med og uden belastning. Fremgangsmåden i forsøget er beskrevet i appendiks A.5. Når generatoren ikke belastes ligger udgangsspændingen mellem 5,17 V og 34,3 V. Det vil sige at den maksimale spænding over statoren i generatoren vil være 34,3 V, da spændingen altid vil være mindre end dette, hvis generatoren belastes. Denne maksimale spænding vil kræve en nedskalering på 59%. Ved belastning bliver den mindste udgangsspænding på 1,38 V ved 1035 omdr./min. Denne meget lave spænding vil kræve en tidobling for at nå op på batteriets ladespænding. Resultaterne fra forsøget fremgår af tabel 4.3 og 4.4. Tabel 4.3: Udgangsspænding fra ombygget klopolsgenerator uden last RPM V g , , , , , , , , , , ,3 Tabel 4.4: Udgangsspænding fra ombygget klopolsgenerator med last. RPM V g , , , , ,4 Pga. tidsmangel er konverteren ikke designet udfra værdierne fra dette forsøg, men istedet udfra de målte værdier fra forsøg 2. Disse værdier er målt på generatoren ved konstant magnetiseringsstrøm i spolen. Hvilket svarer til, at der ville have siddet en permanent magnet med samme konstante styrke. 38
39 Kapitel 5 Konverteren I dette kapitel behandles og analyseres en ikke inverterende buck-boost konverter. Kapitlet starter med et teoriafsnit om DC-DC konvertere. Teoriafsnittet fokuserer på den teori, som skal benyttes senere i kapitlet. Teoriafsnittet bygger på kilderne: [Erickson, Maksimovic, 2004], [Irwin, Nelms, 2008] og [Schaltz, 2009]. Teoriafsnittet efterfølges af en steady-state analyse, samt en småsignals analyse. Ved hjælp af småsignals analysen bestemmes komponentværdier og overføringsfunktionen for konverteren. 5.1 DC-DC konvertere En DC-DC konverter kan enten hæve eller sænke en given indgangsspænding (V g ) til en ønsket udgangsspænding (V o ). Der gælder følgende konverterings forhold for de tre mest anvendte konvertere: buck konverter: V g > V o boost konverter: V g < V o buck-boost konverter: V g > V o eller V g < V o En kombination af buck- og boost konvertere danner grundlag for buck-boost konverteren. Karakteristisk, for en traditionel buck-boost konverter, er, at den har en inverteret udgangsspænding V o, i forhold til V g. Der findes også ikke inverterende buck-boost konvertere, som vælges til dette projekt. Grunden hertil er, at bilbatteri og generator i en bil er koblet til stel ved minus. En inverteret ladespænding vil derfor resultere i en kortslutning. Figur 5.1: Ikke inverterende buck-boost konverter med switche. På figur 5.1 ses en ikke inverterende buck-boost konverter med switche. Komponenterne markeret 39
40 KAPITEL 5. KONVERTEREN med blå, virker som et filter. Derudover ses konverterens 2 switche, som er markeret med rød. Switchene på figur 5.1 vælges til at skulle skifte synkront. Det vil sige, at begge switchene kun kan være enten i position 1 eller position 2. Denne antagelse forenkler den senere regulering. Det gælder for switchene, at de på tiden (T s ) er én gang i position 1 og én gang i position 2. T s bestemmes af switchfrekvensen (f s ) og er og er givet ved; T s = 1 f s. Andelen af perioden T s, hvor switchene er i position 1, kaldes dutycyclen, og angives D. Dutycyclen varierer i intervallet: 0 D 1, mens komplimentæren D er givet ved:d =(1-D). Konverter i steady-state Senere i afsnittet laves analyse af en ikke inverterende buck-boost konverter i steady-state. Steadystate illustreres ved at ses på induktorstrømmen (i L ). Figur 5.2 viser induktorstrømmens udvikling fra opstart til steady-state opnås. Figur 5.2: Induktorstrømmens bølgeform set fra opstart til steady-state er opnået [Erickson, Maksimovic, 2004]. Efter den stiplede linje på figur 5.2 ses, at i steady-state er den samlede ændring i induktor strømmen lig nul over en periode (T s ). Det illustreres yderligere på figur 5.3, hvor det fremgår, at spændingen over spolen ligeledes er lig nul over en periode (T s ). Dette kaldes indukter volt-sekund balance. Tilsvarende gælder for kondensator strøm og spænding i steady-state, som kaldes kondensator ladnings balance. Figur 5.3: Spænding over induktor og strøm igennem induktor i steady-state [Erickson, Maksimovic, 2004]. 40
41 5.2. STEADY-STATE ANALYSE Derved kan kan gennemsnitsværdierne af v L og i C over en periode (T s ) skrives på følgende form: Indukter volt-sekund balance: v L Ts = 0 Kondensator ladnings balance: i C Ts = 0 Udregnes gennemsnitsværdier over en periode (T s ) benyttes formel: x L Ts = 1 t+ts x(τ)d τ (5.1) T s hvor t angiver, at perioden (T s ) kan starte til et vilkårligt tidspunkt i steady-state [Erickson, Maksimovic, 2004]. t Realisering af switch Switchene på figur 5.1 realiseres ved en kombination af transistorer og dioder. Sammensætningen afhænger af konvertertypen og af: 1. Polariteten af spændinger over transistorerne 2. Størrelsen af de strømme dioden skal blokere. De 2 switche realiseres ved en kombination af MOSFET transistorer og Schottky dioder. Komponenterne ses på figur 5.4. Fordelen ved en Schottky dioden er, at den har en hurtigt switchtid og lavt ledespændingsfald. I afsnit 5.4 ses valg af komponenter til den ikke inverterende buck-boost konverter. Figur 5.4: Realisering af switch 1 og 2 med MOSFET transistor og Schottky diode. Transistorerne tilfører tab til konverteren ved de enkelte switch, og tilsvarende er der også effekttab ved dioderne. Da der ikke tages højde for disse tab i de senere beregninger, beskrives de ikke yderlige i afsnittet. 5.2 Steady-state analyse På figur 5.5 ses en model af den ikke inverterende buck-boost konverter, som skal bruges til regulering af spændingen fra den ombyggede klopolsgenerator. Konverteren bliver i dette afsnit analyseret med henblik på at bestemme de fysiske komponenter, samt at opstille små-signals ligninger. Små-signals ligningerne skal bruges til det videre design af en regulator. Der benyttes følgende kilder i afsnittet; [Erickson, Maksimovic, 2004] og [Irwin, Nelms, 2008]. 41
42 KAPITEL 5. KONVERTEREN Der skelnes mellem to positioner: Position 1: Til tiden D; begge transistorer leder, dioder leder ikke Position 2: Til tiden D ; dioder leder, transistorer leder ikke På den måde kan transistorerne reguleres med samme styresignal. Der anvendes store bogstaver, når der er tale om konstante værdier. Ved steady-state er kondensatoren C fuldt opladet i position 1 og i position 2 er spolen fuldt opladet. De indre ohmske modstande i komponenterne medtages ikke i steady-state analysen. Kondensatoren C xx på figur 5.5, medtages ikke med i steady-state analysen, da den er en del af ensretteren i generatoren. Kondensator C xx fjerner eventuel støj. Figur 5.5: Ikke inverterende buck-boost konverter. Nedenfor følger en analyse af konverteren fra figur 5.5 over perioden T s, som opdeles i de to intervaller: T s = { Position 1: 0 t DTs. Position 2: DT s t T s. Position 1 Strømmen i L er den strøm, som løber igennem spolen. Da kondensator C er fuldt opladet, løber strømmene i C og i o, i henholdsvis kondensator og last. Figur 5.6: Ikke inverterende buck-boost konverter i position 1. Ifølge Kirschoffs spændingslov, fås: v L = V g (5.2) 42
43 5.3. UDLEDNING AF SMÅ-SIGNAL LIGNINGER Det bruges at i L = i g. Dernæst fås, ifølge Kirschoffs strømlov, for knudepunkt A, figur 5.6: i C i o = 0 v o i C = i o = (5.3) Z bat ter i Position 2 Spolen aflades i kredsløbet og dioderne sørger for, at der ikke løber en negativ strøm. Figur 5.7: Konverter i position 2. Ifølge Kirschoffs spændingslov, fås: v L = v o (5.4) Ifølge Kirschoffs strømlov, fås for knudepunkt B, figur 5.7: i C + i L i o = 0 i C = i L i o = i L v o Z bat ter i (5.5) 5.3 Udledning af små-signal ligninger For at udlede en små-signals ligningerne anvendes ligningerne: 5.2, 5.3, 5.4 og 5.5, udledt i steadystate analysen. v g og v o erstattes med deres lav-frekvente gennemsnits værdier v g (t) og v o (t). I afsnittet benyttes kilderne [Erickson, Maksimovic, 2004] og [Erickson, Maksimovic, 1998]. Ligningerne kan nu opskrives således: Position 1: Position 2: v L = L di L(t) d t i c = C d v c(t) d t v L = L di L(t) d t i c = C d v c(t) d t v g (t) (5.6) v o(t) Z bat ter i (5.7) v o (t) (5.8) i L (t) v o(t) Z bat ter i (5.9) 43
44 KAPITEL 5. KONVERTEREN Gennemsnitsværdierne for v L, i c samt i g udregnes vha. formel 5.1. For v L fås: v L (t) Ts = v g (t) T s d(t) v o (t) Ts d (t) (5.10) Ligning 5.10 beskriver hvordan lav-frekvens komponenterne af spolespændingen varierer med tiden. For i c fås: i c (t) Ts = v ( o(t) d(t) + i L (t) v ) o(t) d (t) (5.11) Z bat ter i Z bat ter i Ligning 5.11 beskriver gennemsnitsværdien af kondensatorens strøm. Der fås ligeledes for i g at: ig (t) T s = i L (t) d(t) (5.12) Ligning 5.12 beskriver gennemsnitsværdien af konverterens strøminput. De tre ligninger (5.10, 5.11 og 5.12) er ulineære, da de indeholder de tidsafhængige størrelser d(t) og d (t). Samtidig genererer multiplikation med tidsafhængige signaler, harmoniske signaler, som ikke er lineære. Det kræver derfor at ligningerne lineariseres, for at de kan oversættes til frekvens-domænet (Laplace transformering). En grafisk illustration af lineariserigen ses på figur 5.8, hvor der vælges D = 0,5, som lineariserings punkt. Figur 5.8: Grafisk illustration af linearisering af en små-signals ligning [Erickson, Maksimovic, 2004]. For at kunne lineariserer ligningerne konstrueres en små-signals ligninger. Små-signals ligningerne opbygges ved at udtrykke gennemsnitsværdierne vha. DC-komponenten og den meget lille AC-komponent som lægges oveni. Det ses i tabel
45 5.3. UDLEDNING AF SMÅ-SIGNAL LIGNINGER Tabel 5.1: Gennemsnitsværdier udtrykt som et DC- og et AC-led. Gennemsnitsværdier DC-led AC-led v L (t) Ts = V g + v g (t) v o (t) Ts = V o + v o (t) i L (t) Ts = I L + î L (t) ig (t) = I T s g + î g (t) d(t) = D + d(t) d (t) = D - d(t) Værdierne fra tabel 5.1 indføres i ligning 5.10, 5.11 og 5.12, hvorefter de tre følgende led identificeres: DC-led: Indholder kun DC-komponenter. Bruges til beregning af komponentværdier i afsnit ordens AC-led: = små signals ligning. Hver del af dette led indeholder en ac-størrelse ganget med en konstant, som f.eks en DC-del. Bruges til udledning af overføringsfunktion i afsnit ordens AC-led: Hver del er et produkt af AC-størrelser og kan ikke lineariseres fordi den indeholder tids-afhængige signaler. Bruges ikke til videre arbejde i rapporten 1. Spænding over spole: Værdierne fra tabel 5.1 indføres i ligning 5.10: ( d IL (t) L + dî ) L (t) = (V g + v g (t)) (D + d(t)) (V o + v o (t)) (D d(t)) d t d t = V g D + v g (t) D + d(t) v g (t) +V g d(t) V o D (5.13) v o (t) D +V o d(t) + v o (t) d(t) Ligning 5.13 ses præsenteret ledvis nedenfor: DC-del: ( ) d IL (t) L = V g D V o D (5.14) d t 2.ordens AC-del: 0 = d(t) v g (t) + v o (t) d(t) (5.15) 1. ordens AC-del: ( ) dîl (t) L = v g (t) D +V g d(t) v o (t) D +V o d(t) (5.16) d t 45
46 KAPITEL 5. KONVERTEREN 2. Strøm igennem kondensator: Værdierne fra tabel 5.1 indføres i ligning 5.11: ( dvc C d t + d v ) c(t) = V o + v o (t) (D + d(t)) + d t Z bat ter i [ (IL + î L (t) ) V o + v o (t) Z bat ter i ] (D d(t)) = V o D +V o d(t) + v o (t) D + v o (t) d(t) Z bat ter i + I L D I L d(t) + î L (t) D î L (t) d(t) V o D V o d(t) + v o (t) D v o (t) d(t) Z bat ter i (5.17) Ligning 5.17 ses præsenteret ledvis nedenfor: DC-del: ( dvc C d t ) = V o D Z bat ter i + I L D V o D Z bat ter i (5.18) 2.ordens AC-del: 0 = v o d(t) Z bat ter i î L (t) d(t) + v o d(t) Z bat ter i (5.19) 1. ordens AC-del: 3. Indgangsstrøm Værdierne fra tabel 5.1 indføres i ligning 5.12: ( ) d vc (t) C = î L (t) D v o D + v o D I L d(t) (5.20) d t Z bat ter i I g + î g (t) = I L D + î L (t) D I L d(t) + î L (t) d t (5.21) Ligning 5.21 ses præsenteret ledvis nedenfor: DC-del: 2.ordens AC-del: I g = I L D (5.22) 0 = î L (t) d t (5.23) 1. ordens AC-del: î g (t) = î L (t) D I L d(t) (5.24) Ligning 5.16 og 5.20 bruges til at udlede et udtryk for konverterens overføringsfunktion. Det gøres i afsnit
47 5.4. BESTEMMELSE AF KOMPONENTER 5.4 Bestemmelse af komponenter I dette afsnit beregnes størrelserne på komponenterne til den ikke inverterende buck-boost konverter. Der benyttes værider for spænding, som er blevet målt i forsøg 2 i appendiks A.3. Ved at bruge værdierne tilpasses steady-state analysen klopolsgeneratoren. Derudover sættes ladespændingen på batteriet til 14 V, og der antages en spændings-ripple ( v o ) på 1 V, som svarer til ca. 7 % af V o. Desuden benyttes en maksimal effekt for generatoren på 800 W, for at være sikre på at konverteren kan klare den opgivne maksimaleffekt, fra generatorens datablad, på 751 W. Til bestemmelse af komponentstørrelser tages udgangspunkt i to situationer for input til konverteren, hvor værdierne for henholdsvis maksimal indgangsspænding og minimal indgangsspænding benyttes. For begge situationer bruges den maksimale effekt (P max ). Til beregning af I o,max benyttes P max og den mindste acceptable værdi for output spændingen, 13 V. Den maksimale strøm bliver dermed: P = I o,max V I o,max = 800W 13V = 61,5A (5.25) Nedenfor ses de værdier, som bruges i analysen: P max = maksimal effekt = 800 [W ] Situation 1: V g,mi n = minimal indgangsspænding = 10 [V ] I g,max = maksimal indgangsstrøm = 80 [A] Situation 2: V g,max = maksimal indgangsspænding = 104 [V ] I g,mi n = minimal indgangsstrøm = 7,7 [A] Output: I o,max = maksimal udgangsstrøm = 61,5 [A] Duty cycle Ved at se på spændingen over spolen i de to perioder kan udledes et udtryk for duty cyclen (D). I perioden T s er v L : v L = { Vg for 0 t DT s. -V o for DT s t T s. 47
48 KAPITEL 5. KONVERTEREN Integralet over v L for hele perioden T s bliver så vha. formel 5.1: 1 Ts T s 0 v L d t = 1 DTs V g d t 1 Ts T s T s 0 DT s V o d t = 0 V g DT s V o T s +V o DT s = 0 V g DT s V o (1 D) T s = 0 D V o = V g 1 D (5.26) Ud fra formel 5.26 kan det ideelle konverteringsforhold (M(D)) for konverteren opskrives: M(D) = V o V g = D 1 D (5.27) Dutycyclen for steady-state analysen kan nu udregnes: D = V o V o +V g (5.28) Værdier indsættes og D udregnes: Situation 1 (V g,mi n ): 14V D = 14V + 10V 0,6 (5.29) Situation 2 (V g,max ): 14V D = 14V + 104V 0,11 (5.30) Størrelse på spole Til beregning af størrelse på spole benyttes ligning 5.2. Den omskrives til: v L = L di L d t = L 2 i L = V g DT s L = V g DT s 2 i L (5.31) Der benyttes den dobbelte rippel i L, da strømrippelen defineres som på figur 5.9: 48
49 5.4. BESTEMMELSE AF KOMPONENTER Figur 5.9: Definition af strømrippel [Erickson, Maksimovic, 2004]. Det antages at en strømrippel på 5% er acceptabel, derfor fås: Situation 1: i L = I L 0,05 i L = 80A 0,05 = 4A (5.32) Situation 2: i L = I L 0,05 i L = 7,7A 0,05 = 0,38A (5.33) Størrelsen på spolen kan nu udregnes vha. formel 5.31, hvor T s = 1 f s og f s = 40kHz: Situation 1: L = 10V 0, H z 2 4A = 18, 8µH (5.34) Situation 2: L = 104V 0, H z 2 0,38A = 376µH (5.35) Der vælges den største værdi af spolen, derfor gælder der, at: L 376µH (5.36) Størrelse på kondensator Til beregning af størrelse på kondensator benyttes ligning 5.3, der omskrives til: i c = C d v c d t = C 2 v o DT s = I o C = I o DT s 2 v o (5.37) Der benyttes den dobbelte spændingsrippel, v o, da spændingsrippelen defineres som på figur 5.10: 49
50 KAPITEL 5. KONVERTEREN Figur 5.10: Definition af spændingsrippel [Erickson, Maksimovic, 2004]. Det antages at en ladespændings-ripple på 1V, som svarer til 7%, er acceptabelt, derfor fås: v o = 1V (5.38) Størrelsen på kondensatoren kan udregnes vha. formel 5.37, hvor samme værdi for T s, som ved beregningen af spolen benyttes: Situation 1: C = 61,5A 0, H z 2 1V = 461µF (5.39) Situation 2: C = 61,5A 0, H z = 84, 6µF (5.40) 2 1V Der vælges ligeledes den største værdi for kondensatoren, derfor gælder der, at: C 461µF (5.41) Valg af komponenter For at vælge komponenter laves en worst-case analyse, hvor konverteren analyseres ud fra de maksimale værdier for indgangsspænding, indgangsstrøm og udgangsstrøm. Derved findes de maksimale værdier for strøm og spænding, som de enkelte komponenter skal kunne holde til. Benævnelserne på komponenterne kommer fra figur 5.5. For de to transistorer, T 1 og T 2, gælder det, at når de leder, kan de blive udsat for en strøm på 61,5 A og når de afbryder, kan de få en spænding på 104 V over sig. Diode D 1 skal i position 1 kunne blokere strømme ved en negativ spænding på 104 V. I position 2 skal den kunne lede en størm på op til 61,5 A. Diode D 2 skal ligesom D 1 i position 2 kunne lede en strøm på op til 61,5 A, men vil hverken i position 1 eller 2 være udsat for større negativ spænding end 14 V. Kondensatoren C vil have samme spænding over sig som batteriet, så den skal kunne klare 14 V. Kondensatoren C xx vil have samme spænding som V g og skal derfor kunne klare 104 V. Kondensatoren vælges til 470 µf og 100 V. 50
51 5.4. BESTEMMELSE AF KOMPONENTER Spolen L vil i position 2 være i serie med dioderne og skal derfor kunne klare en strøm på op til 61,5 A. Da transistorerne skal lede synkront reguleres de simultant. For at sikre samme switchtid vælges at benytte to ens transistorer, som dimensioneres efter de største værdier af strøm og spænding. Tilsvarende gælder for dioderne. Ud fra worst-case analysen og de beregnede værdier vælges følgende komponenter til konverteren: Tabel 5.2: Komponenter til konverteren. Type Antal Placering Producent Nummer Type Transistor 2 T 1 og T 2 IRF IRFP4568 HEXFET Power MOSFET Diode 1 D 1 og D 2 IXYS DSS 2x A Power Schottky Rectifier Kondensator 1 C Jamicon 312C2(M) Kondensator Kondensator 1 C xx Jamicon 740C2 (M) Kondensator Spole 1 L Selv-byg 12 stk. S stk. bygget sammen Design af spole Normalt vil der til en konverter som den, der skal bygges i forbindelse med dette projekt, blive brugt én spole, som opfylder de stillede krav. I dette tilfælde vil det sige, at den skal have en induktans på mindst 376 µh og kunne holde til 61,5 A. Det har indenfor projekttiden ikke været muligt at nå at fremskaffe en sådan spole. Derfor anvendes en løsning med flere spoler koblet sammen. I appendiks D fremgår designmetoden for den spole, som skulle have været brugt i konverteren, mens der herefter kommer en beskrivelse af den valgte løsning. Strømmen som spolen skal kunne klare, begrænses til 30 A, da det ellers vil kræve for et for stort antal at opnå den rette induktans. Der benyttes 12 spoler. De er designet til at kunne klare 10,5 A hver. Ved hjælp af serie og parallel koblinger sammensættes en spole, som ses på figur Tre parallelforbindelser, hvor fire spoler sidder i serie. Serieforbindelsen giver en induktans på ca. 1340µH, hvilket er målt. Samlet udregnes induktansen ved for hele spoledesignet: 1 L = = L = 447µH (5.42) Figur 5.11: Spoledesign. 51

52 KAPITEL 5. KONVERTEREN Det endelige design af konverteren, med de valgte komponenter fra tabel 5.2 og spolen designet som på figur 5.11, bliver som på figur 5.12: Figur 5.12: Den fremstillede konverter. 5.5 Udledning af overføringsfunktion for konverter I dette afsnit udledes overføringsfunktionen for konverteren med henblik på senere regulering af systemet. Ud fra udtrykkene i ligning 5.16, 5.20 og 5.24 kan overføringsfunktionerne for den ikkeinverterende buck-boost konverter udledes. Funktionerne plottes i afsnit 6.1 i forbindelse med regulator designet. Kilder brugt i afsnittet er [Erickson, Maksimovic, 2004] og [Phillips, Harbor, 2000]. Et udtryk for v o (s) udledes, som en funktion af de to uafhængige input: kontrol input ( d(s)) og spændings input ( v g (s)). Det illustreres forenklet på figur Figur 5.13: Blokdiagram over de to input, kontrol og spænding, der giver v o (s). AC-output-spændingen ( v o (s)) kan skrives som ligning 5.43, hvor det ses, hvad der har indflydelse på v o (s): v o (s) = G vd (s) d(s) +G v g (s) v g (s) (5.43) 52
53 5.5. UDLEDNING AF OVERFØRINGSFUNKTION FOR KONVERTER Hvor: G vd control-to-output [.] G v g line-to-output [.] d(s) control input [.] v g (s) spændings input [V ] Line-to-output overføringsfunktionen beskriver, hvordan støj i input-spændingen ( v g (s)) forårsager støj i outputspændingen ( v o (s)). Funktionen findes ved at sætte kontrol inputtet ( d(s)) til 0. G v g (s) = v o(s) v g (s) (5.44) d(s)=0 Control-to-output overføringsfunktionen beskriver, hvordan kontrol input variationer ( d(s)) har betydning for output spændingen ( v o (s)). I forhold til regulering af output spændingen er overføringsfunktionen G vd (s) et hovedelementet og har stor betydning for regulatoren, som skrives G c. Derfor fokuserer afsnittet på overføringsfunktionen G vd (s). Funktionen findes ved at sætte spændings-inputtet ( v g (s)) lig 0. G vd (s) = v o(s) d(s) vg (s)=0 (5.45) På figur 5.14 illustreres reguleringen af v o (s) vha. et blok diagram. Selve regulatoren er angive med; G c. Figur 5.14 illustrerer ydermere de følgende to funktioner: 1. Åbensløjfe funktionen: G ol (s) = G c (s) G vd (s) (5.46) 2. Lukketsløjfe funktionen: G cl (s) = G ol (s) G ol (s) + 1 (5.47) Disse to funktioner er hovedelementerne i forbindelse med design af regulatoren G c, se afsnit 6.1. Figur 5.14: Illustration af reguleringssystem. 53
54 KAPITEL 5. KONVERTEREN Udledning af overføringsfunktioner Først skrives ligningerne 5.16, 5.20 fra afsnit 5.3 om til frekvens-domænet ved at tage Laplace transformen. Herefter kan udledningen begynde. slî L (s) = v g (s) D +V g d(s) v o (s) D +V o d(s) (5.48) sc v o (s) = î L (s) D (D + D ) v o (s) Z bat ter i I L d(s) (5.49) Da impedansen Z bat ter i ikke har en imaginær værdi, skrives Z bat ter i som R i det følgende. I ligning 5.48 isoleres î L (s), for at den kan sustitueres ind i ligning 5.49, og ligning 5.50 fås: sc v o (s) = D sl ( v g (s) D + (V g +V o ) d(s) v o (s) D ) (D + D ) v o (s) I L d(s) (5.50) R I udtryk 5.50 isoleres v o (s) og der fås: v o (s) = R D v g (s) D + D d(s) V g + D d(s) V o I L d(s) s L s 2 C L R + D 2 R + s L D + s L D (5.51) Udtrykket i ligning 5.51 er tilsvarende udtrykket for v o (s) i ligning For at identificerer G v g (s) og G vd (s) sættes hhv. d(s) og v g (s) lig nul ifølge superpositionsprincippet. Der fås med d(s) sat lig nul: v o (s) = R D D s 2 C L R + D 2 R + s L D + s L D v g (s) D D = s 2 C L + D 2 + s L D R + s L D R } {{ } G v g (s) v g (s) (5.52) På tilsvarende måde findes et udtryk for v o (s), hvor input spændingen v g (s) sættes lig nul. v o (s) = D D V g + D V o I L s L s 2 C L + D 2 + s L D R + s L D R d(s) (V g +V o ) D I L s L = s 2 C L + D 2 + s L D R + s L D R } {{ } G vd (s) d(s) (5.53) 54
55 5.5. UDLEDNING AF OVERFØRINGSFUNKTION FOR KONVERTER Ved at lægge 5.52 sammen med 5.53 fås et udtryk for v o (s), som svarer til ligning 5.43: v o (s) = D D s 2 C L + D 2 + s L D R + s L D R v g (s) + (V g +V o ) D I L s L s 2 C L + D 2 + s L D R L D + s R d(s) (5.54) Ligning 5.54 omskrives til en form, med leddene s 0,s 1 og s 2 i nævner. Der divideres igennem med D 2. ( ) v o (s) = D D 1 L 1 + s + s R D 2 L C v g (s) + V I g +V o 1 s L L D D (V g +V o ) L 1 + s + s 2 D } {{ 2 R D 2 L C d(s) (5.55) } 2 D } {{ 2 } G v g G vd Den ønskede form af G vd er opnået, og åbensløjfe funktionen G ol (s), se ligning 5.46, kan opskrives: ( ) I G ol (s) = G c (s) Vg +V o 1 s L L D D (V g +V o ) L 1 + s + s R D 2 L C (5.56) 2 D 2 Denne ligning analyseres i afsnit, 6.1, i forbindelse med design af regulator. 55
56
57 Kapitel 6 Regulering Da den ikke inverterende konverter behøver en regulering for at kunne fungere og levere en fast ladespænding, designes i dette kapitel en regulator. I afsnittet benyttes kilderne: [Erickson, Maksimovic, 2004], [Phillips, Harbor, 2000] og [Schaltz, 2009]. 6.1 Regulator design For at kontrollere stabiliteten af åbensløjfe funktionen G ol (s), se formel 5.56 findes poler og nulpunkter ved forskellige værdier af D. Åbensløjfe funktionen er givet ved: G ol (s) = G c (s) G vd (s) (6.1) hvor G c = 1. På den måde, ses kun på G vd, hvorved det fremgår, hvilken regulering systemet behøver. Senere tjekkes G ol igen, når der er designet en regulator. Ligning 6.1 illustreres på figur 6.1. Figur 6.1: Blokdiagram af åben-sløjfe funktionen. Da de øvrige værdier i formel 5.56 er kendte vælges værdier for R og D. R, som er den ohmske belastning, der symboliserer batteriet, vælges udfra målte data til 2 Ω. D er en variabel, derfor vælges fem arbejdspunkter. Værdier af D mi n og D max ses udregnet i afsnit 5.2. Derudover vælges tre andre værdier af D. Disse fordeles jævnt i intervallet mellem D mi n og D max. For hver værdi af D udregnes værdier af V g og I max vha. formel 5.28 og På figur 6.2 ses placeringen af rødder og nulpunkter i G ol (s). 57
58 KAPITEL 6. REGULERING Figur 6.2: Rodkurve af G ol med de fem værdier af D. Poler er angivet med x og nulpunkter med o. Fælles for alle værdier af D er, at der er et nulpunkt i højre halvplan samt to poler i venstre halvplan. Da der er et nulpunkt i højre halvplan ses, at G ol (s) er et Ikke-minimum-fase-system. Det betyder, at fasemargin (ϕ m ) og forstærkningsmargin (K m ) ikke kan aflæses korrekt af Matlab på et bodediagram, da det giver en fejl på 360 o, som illustreres i afsnit Da Matlab giver et troværdigt plot vha. Nyquist diagrammer for et ikke-minimum-fase-system benyttes disse Regulator design For at forenkle regulator-designet ses kun på én værdi af D. Gennemsnitsværdien, som er markeret med rød (D2) på figur 6.2, vælges. Der gælder følgende for D2: D2 = 0,36 V g 2 = 24,9V I 2 = 32,3A (6.2) Værdierne fremkommer ved indsættelse af D2 i formel 5.28 og 5.25 I forbindelse med regulator design benyttes to designkriterier. 58
59 6.1. REGULATOR DESIGN 1. designkriterie På Nyquist diagrammet figur 6.3 tjekkes systemets stabilitet for D2. Det gøres vha. Nyquist stabilitets kriterie, se ligning 6.3. Det ønskede design er at Z = 0: Z = N + P (6.3) Hvor: Z N P antalllet af lukket-sløjfe poler i det højre halvplan. antallet af med-urs omcirklinger af punktet (-1,0), regnet med fortegn. antallet af åben-sløjfe poler i det højre halvplan. På figur 6.3 ses to omcirklinger af (-1,0) og da ikke er poler i højre halvplan betyder det, at lukket-sløjfe overføringsfunktionen (G cl (s)) vil være et sytem med 2 poler i højre halvplan, da: Z = = 2 0 G cl (s) vil derfor være et ustabilt system, og skal reguleres. Figur 6.3: Nyquist plot af G ol (s). Den første del af reguleringen er at aflæse systemets fasemargin (ϕ m ) og forstærkningsmargin (K m ). Ud fra disse værdier bestemmes hvilken type regulering, der er brug for. På figur 6.4 illustreres hvordan fase- og forstærkningsmargin aflæses på et Nyquist diagram. 59
60 KAPITEL 6. REGULERING Figur 6.4: Nyquist plot, hvor fasemargin (ϕ m ) og forstærkningsmargin (K m ) er påtegnet. 1. Fasemargin (ϕ m ): aflæses hvor vektoren G(j ω1 ) = 1.F asemar g i n(ϕm ) er vinklen mellem realaksen og vektoren, og beregnes som ϕ m = G(j ω 1 ) + 180, hvor G(j ω 1 ) < 0 På figur 6.4 er fasemargin negativ. 2. Forstærkningsmargin (K m ): Afstanden fra punktet (-1.0) til der, hvor kurven skærer imaginær aksen. Hvis punktet (-1,0) ligger til venstre for skæringen, er forstærkningsmargin positiv. Ligger punktet til højre for skæringen, som det ses på figur 6.4, er forstærkningen negativ. Der er kun en negativ forstærkningsmargin, når der er en eller flere omcirklinger omkring (-1,0). 2. designkriterie Udover Nyquist stabilitetskriterie, benyttes følgende design kriterier til regulator-design, [Phillips, Harbor, 2000]: Positiv værdi af = { Fasemargin: ϕm [30 o 60 o ] De aflæste værdier af ϕ m og K m på Nyquist digrammet er: Forstærkningsmargin: K m > 6dB ϕ m = -82,10 o K m = -32,2dB. Et tilsvarende bodeplot, sammenlignes med Nyquist diagrammet. Det ses herved, at Matlab laver et forkert faseplot, fordi fasen angives forkert. Det er illustreret på figur 6.5, hvordan Matlab starter fasen i 360 o i stedet for 0 o. På den måde vil fasen aldrig skære -180 o, og fasemargin angives derved som uendelig stor. 60
61 6.1. REGULATOR DESIGN Figur 6.5: Korrigering for at Matlab plotter fasen 360 forkert. Ved at revidere graderne på faseplottet, som det ses på figur 6.5, udføres resten af regulator designet ved brug af bodeplots og ikke Nyquist-diagrammer. Det vurderes, at designet af regulatoren forenkles ved brug af bodeplots. Det tilsvarende bodeplot af Nyquist diagrammet fra figur 6.3 er plottet på figur 6.6, hvor graderne er revideret. Figur 6.6: Bodeplot af G ol uden regulator. Da der er aflæst en negativ fasemargin, er det nødvendigt med tillæg af et positivt fasebidrag til G ol (s). Det gøres ved brug af en lead-regulator, da den kan give et positivt fasedrej på 90 o. Karakteristikken af en lead-regulator ses på figur
62 KAPITEL 6. REGULERING Figur 6.7: Bodeplot af lead regulator fra formel 6.8. For at designe lead-regulatoren benyttes en designprocedure fra [Phillips, Harbor, 2000], som er beskrevet i appendiks C. Lead-regulator Værdier af ω 1 vælges ud fra, at der maksimalt kan være et positivt fasedrej på 90 o ; kompensatorvinklen (θ 1 ) sættes derfor til 85. Lead-regulatoren er på formen: G c (s) = a 1 s + a 0 b 1 s + 1 (6.4) Design algoritmen er som følger: 1. Kompensatorvinkel (θ 1 ) ved ω 1 : θ 1 = G c (j ω 1 ) = 180 o + ϕ m G p (j ω 1 )H(j ω 1 ) = 85 o = G p (j ω 1 ) = 220 o (6.5) 2. ω 1 aflæses på fasekarakteristikken ved 220 til 6210 r ad s 3. DC-forstærkningen (a o ) udregnes til at skulle være mindre end ca. 0,1 og sættes til 0, Tidskonstanten a 1 udregnes: a 1 = 1 a 0 Gp (j ω 1 )H(j ω 1 ) cos(θ1 ) cos(θ 1 ) a 0 Gp (j ω 1 )H(j ω 1 ) = 16, (6.6) 62
63 6.1. REGULATOR DESIGN 5. Tidskonstanten a 2 udregnes b 1 = cos(θ 1) a 0 Gp (j ω 1 )H(j ω 1 ) ω 1 si n(θ 1 ) = 12, (6.7) De fem konstanter indsættes i ligning 6.4, og dermed er lead-regulatoren designet, se ligning 6.8 og figur 6.7: G c1 (s) = 16, s + 0,001 12, s + 1 Lead-regulatoren (G c1 (s)) multipliceres på åbensløjfe funktionen (G ol (s)), se illustration på figur 6.8, og der fås: (6.8) G ol 1 (s) = G vd (s) G c1 (s) (6.9) Figur 6.8: Blokdiagram af åben-sløjfe funktionen G ol 1. Der laves et nyt plot af G ol 1 (s), som ses på figur 6.9. Figur 6.9: Bodeplot af G ol 1 (s) med lead regulator. Bodeplottet har nu en positiv fase- og forstærkningsmargin og overholder iike helt 2. design kriterie, da ϕ m = 44,7 men K m = 2,68 db, som er mindre en 6 db. For at tjekke step-responsen af G cl (s) lukkes sløjfen og et udtryk for lukketsløjfe funktionen ses i ligning 6.10: 63
64 KAPITEL 6. REGULERING G cl1 (s) = G ol 1(s) 1 +G ol 1 (s) Step-responsen af G cl1 (s) ses plottet på figur 6.10: (6.10) Figur 6.10: Step-respons af lukket-sløjfe overføringsfunktionen G cl1 (s). Det ses på step-responsen, at systemet har en stor stationær fejl. Det betyder, at yderligere regulering er nødvendig. 64
65 6.1. REGULATOR DESIGN PI-regulator For at fjerne den stationære fejl kan benyttes en PI-regulator. PI-regulatoren bidrager med forstærkning i det lav-frekvente område, samt et negativt fasedrej i det lavfrekvente område. Karakteristikken for en PI-regulator ses på figur Figur 6.11: Bodeplot af PI regulator, fra formel Til design af PI-regulator benyttes ligeledes en designprocedure fra [Phillips, Harbor, 2000], se appendiks C. PI-regulatoren er af formen: Design algoritmen er som følger: 1. DC-gain: K c = 2 G pi (s) = K p + K i s = K p s + K i s (6.11) 2. Kompensatorvinkel: θ 2 = -180 o = 130,3 3. ω 2 aflæses på fasekarakteristikken på figur 6.9 til 5590 r ad s ved 130,3). ved en fasemargin på 45 (aflæses 4. Proportionalforstærkning (K p ): K p = cosθ 2 Kc G p (j ω 2 )H(j ω 2 ) = 0, 5 (6.12) 5. Integralforstærkning (K i ): K i = 0,1ω 2 K p = 279,5 (6.13) Ud fra de fem udregnede værdier designes PI-regulator. Det endelige design ses ved ligning 6.14 og er plottet på figur 6.11: 0,5 s G c2 (s) = s (6.14) 65
66 KAPITEL 6. REGULERING PI-regulatoren (G c2 (s)) multipliceres på G ol 1 (s), se illustration på figur 6.12 og åbensløjfe funktionen bliver så: G ol 2 (s) = G vd (s) G c1 (s) G c2 (s) (6.15) Figur 6.12: Blokdiagram af åben-sløjfe funktionen G ol 2. Der laves et nyt plot af G ol 2 (s), som ses på Figur 6.13: Bodeplot af G ol 2 med lead- og PI-regulator. Bodeplottet har nu en positiv fase- og forstærkningsmargin og overholder 2. design kriterie, da ϕ m = 76,4 og K m = 8,64 db. For at tjekke step-responsen af G cl2 (s) lukkes sløjfen, se illustration Figur 6.14: Blokdiagram over lukketsløjfe overføringsfunktionen. 66
67 6.1. REGULATOR DESIGN Et udtryk for lukketsløjfe funktionen ses i ligning 6.16: G cl2 = G ol 2 1 +G ol 2 (6.16) Plottet af step-responsen af G cl2 ses på figur 6.15: Figur 6.15: Step-respons af lukket-sløjfe overføringsfunktion G cl2. Det fremgår af karakteristikken på figur 6.15, at de stationære fejl er fjernet. Systemet har en indsvingstid aflæst til 0,3999 sekunder. Indsvingningstiden vurderes at være tilstrækkelig, da systemet med generator og forbrændingsmotor i sig selv er langsomt. Ligeledes fremgår det, at i løbet af de første 0,0034 sekunder, svinger amplituden af step-responsen op på 0,636, hvorefter amplituden falder igen ned til 0,353. Udsvinget skyldes, at der er 0 db forstærkning tre steder i systemet, se figur Det vil sige, at grafen skærer 0 db aksen tre steder. Peaken på 0,636 skyldes forstærkningen i det højfrekvente område. For at undgå udsvingene på step-responsen kan systemet dæmpes yderligere, så der kun er en forstærkning ved 0 db i det lavfrekvente område. Dæmpes systemet betyder det, at indsvingstiden bliver langsommere. En yderligere dæmpning af systemet er undersøgt, hvoraf det fremgik at indsvingningstiden nærmede sig et sekund, samt at amplitudeudsvingninget ikke kunne fjernes helt med en proportionalforstærkning. Derfor vælges at beholde en hurtigere indsvingningstid og ikke dæmpe systemet yderligere. Stabiliteten af lukketsløjfe funktionen kontrolleres ved at benytte 1. designkriterie. Rodkurven plottes, se figur
68 KAPITEL 6. REGULERING Figur 6.16: Rodkurve for G cl2, Alle poler ligger i venstre halvplan. Da der ikke er poler i højre halvplan er systemet stabilt. Ligeledes fås at Z = 0. Den ønskede regulering er nu opnået ved at multiplicere en PI-lead regulering på åbensløjfe funktionen G ol (s). PI-lead regulatoren(g c (s)) kan skrives sammensat som: ( 16, ) ( ) s + 0,001 0,5 s G c (s) = 12, s + 1 s (6.17) For at få koblet regulatoren sammen med den ikke inverterende buck-boost konverter skal G c realiseres med elektriske komponenter. Dette gøres i afsnit
69 6.2. REALISERING AF KONTROLENHED 6.2 Realisering af kontrolenhed Dette afsnit beskriver, hvordan regulatorerne G c1 og G c2 kan realiseres vha. analog elektronik, samt hvordan reguleringens output omsættes til et PWM-signal. Transistorerne i buck-boost konverteren styres af PWM-signalet.I afsnittet benyttes kilderne; [Irwin, Nelms, 2008] og [Phillips, Harbor, 2000]. Regulatorer, PWM, comparator og sensorgain betragtes som en samlet kontrolenhed til konverteren og er illustreret på figur Figur 6.17: Konverter med kontrolenhed Comparator og Sensorgain Comparatoren sammenligner de to signaler, V r e f og V o+, ved subtraktion. Forskellen giver fejlsignalet V e. Comparatoren og sensorgain realiseres ved at benytte en operationsforstærker koblet differentielt. Opkoblingen ses på figur Figur 6.18: Differentielt koblet operationsforstærker. Der ønskes et udtryk for fejlsignalet (V e ). Derfor analyseres koblingen på figur Det antages, at V = V + = V hvorved formel 6.18 fås: V r e f V R 3 V R 4 = V o V R 1 69 V V e R 2 (6.18)
70 KAPITEL 6. REGULERING Hvis R 2 = R 4 og R 1 = R 3, kan formel 6.18 reduceres til formel V e = R 2 R 1 (V r e f V o ) (6.19) Da sensorgain (H(s)) = 1, har det ingen indflydelse på formel Det betyder, at der ikke foretages spændingsdeling og således er; R 1 = R 2. Dermed reduceres udtrykket for fejlsignalet (V e ) til: V e = V r e f V o (6.20) Dermed er forskriften for comparator og sensorgain opnået, og modstandene vælges til: R 1 = R 2 = R 3 = R 4 = 1kΩ Lead regulator Lead regulatoren opbygges af to operationsforstærkere, to kondensatorer og fire modstande. Koblingen ses på figur Forskriften for lead regulatoren, fra formel 6.8, benyttes til at udregne størrelsen på de enkelte komponenter. Dette gøres ved at sætte den lig forskriften for lead regulatoren udtrykt ved elektriske komponenter (G c1,elek ), [Phillips, Harbor, 2000], se formel 6.21: 1, s + 0,001 1, = R 8 R6 R5 C 1 s + 1 s + 1 R } {{ } 7 R 5 R 6 C 2 s + 1 } {{ } G c1 G c1,elek (6.21) Ud fra formel 6.21 findes følgende udtryk: R 8 R 7 R6 R 5 = 0,001 (6.22) R 5 C 1 0,001 = 1, (6.23) R 6 C 2 = 1, (6.24) Derefter vælges C 1 og C 2 til 10 µf og R 8 vælges til 100 Ω. Ved at løse de tre ligninger; 6.22, 6.23 og 6.24 findes de resterende 3 ubekendte værdier, der fås: R 5 =165 Ω, R 6 =1,25 Ω, R 7 = 756 Ω. På figur 6.19 ses lead regulatoren realiseret med de udregnede komponentværdier. 70
71 6.2. REALISERING AF KONTROLENHED Figur 6.19: Lead regulator realiseret vha. analog elektronik PI regulator PI regulatoren opbygges af to operationsforstærkere, to kondensatorer og fire modstande. Koblingen ses på figur Forskriften for PI regulatoren fra formel 6.14 sættes lig forskriften for PI regulatoren (G c2,elek ) [Phillips, Harbor, 2000], ud fra samme metode som for lead regulatoren. Se formel 6.25: Ud fra formel 6.25 findes følgende formler: 0,5s = R 12 R10 R10 C 3 s + 1 } {{ s } R 11 R 9 R 10 C 3 s } {{ } G c2 G c2,elek (6.25) R 12 R 11 R10 R 9 = 0,5 (6.26) 1 0,5 = 279 (6.27) R 10 C 2 Derefter vælges C 3 til 10 µf, R 11 vælges til 1000 Ω og R 12 vælges til 100 Ω. Ved at løse ligning 6.26 og 6.27 fås: R 9 =35,8 Ω R 10 =179 Ω. På figur 6.20 ses PI regulatoren realiseret vha. de udregnede komponentværdier. Figur 6.20: PI regulator realiseret vha. analog elektronik. 71
72 KAPITEL 6. REGULERING Pulse width modulator På figur 6.21 er PWM-kredsløbet markeret med en rød cirkel. Kredsløbet producerer et logisk signal (PWM-signalet), som styrer transistorerne. Signalet er periodisk med frekvens og duty cycle. Målet med pulse width modulatoren er at producere en duty cycle (D), som er proportional med det analoge input V (e lead PI ). Kredsløbet består af en comparator og en savtakgenerator. Savtakgeneratoren sender et takket signal (V sav t ak ), som det ses på figur Det ses ligeledes, hvordan én periode på PWM signalet, er analogt til én periode på savtak-signalet. Den del af perioden (T s ), hvor V (e lead PI ), ligger over V sav t ak er duty cyclen (D). Figur 6.21: PWM realiseret vha. analog elektronik. Figur 6.22: Signal fra savtak generator samt PWM-signal. På figur 6.21 er de to opto-couplere markeret med en blå cirkel. Der benyttes to opto-couplere, da de to transistorer skal styres simultant, og da transistorerne ikke har samme source spænding. Optocouplerne laver en galvanisk adskillelse imellem PWM-signal og konverter. Samlet system På figur 6.23 ses det samlede elektriske system som det tænkes realiseret. Systemet inddeles i generator, konverter, sensorgain og comparator, lead regulator, PI regulator og pulsewidth modulator. Reguleringerne opbygges dog ikke fysisk, pga. tidsmangel. 72
73 6.2. REALISERING AF KONTROLENHED Figur 6.23: Samlet system. 73
74
75 Kapitel 7 Sammenligning Dette kapitel beskriver forskellene på de to systemer: Det oprindelige system bestående af den traditionelle klopolsgenerator med en magnetiseringsspole i rotoren og en ekstern manuel regulering. Det nye system bestående af en ombygget klopolsgenerator med permanente magneter i rotoren og en ekstern buck-boost konverter til regulering af udgangsspændingen. Resultaterne fra de forskellige test vil samtidig blive behandlet. 7.1 Oprindelig og ny generator Det traditionelle system er testet ved forskellige belastninger, og virkningsgraden er målt ved forskellige ladespændinger. På figur 7.1 ses en graf over de målte virkningsgrader for de forskellige forsøg. Virkningsgraden ligger i intervallet fra ca. 29 % til ca. 42 %, alt efter hvor hårdt generatoren belastes og omdrejningstallet på rotoren. Figur 7.1: Virkningsgraden for den oprindelige klopolsgenerator ved forskellige omdrejningstal. Det gamle system har den bedste virkningsgrad ved lavere omdrejningstal og kan levere en udgangseffekt på 750 W ved en ladespænding på 14 V. Her er virkningsgraden 31,1 %. Det nye system er testet ved forskellige belastninger og omdrejningstal. Generelt bliver virkningsgraden, for den ombyggede klopolsgenerator uden konverter, bedre ved højere omdrejningstal. Virkningsgraden varierer fra 4 % til 25 %, hvor det sidste opnås ved 4360 omdr./min og en middel belastning (1,2Ω). Den maksimale målte udgangseffekt, fra det nye system, er på 136 W. Ved den største belastning (0,2Ω) var virkningsgraden konstant på 9 % uafhængigt af omdrejningstallet. 75
76 KAPITEL 7. SAMMENLIGNING Konverterens virkningsgrad blev også målt seperat, men uden den færdige regulering. Derfor blev reguleringen af duty cyclen styret manuelt. Konverterens virkningsgrad spænder i testen fra 47 % til 80 % ved ca omdr./min. I testen ændres kun duty cyclen. Da forsøget blev lavet vha. af manuel regulering af duty cyclen, er resultaterne ikke helt retvisende. I de tilfælde hvor udgangsspændingen lå mellem 13 V og 14 V blev den samlede systemvirkningsgrad målt til at være mellem 8 % til 11 %. I forsøget afdækkes kun et begrænset kørselsområde, og derfor har systemet muligvis en højere virkningsgrad for andre værdier af omdrejningstal og duty cycle. Resultaterne fra forsøget kan ses på tabel A.7 i appendiks A.6. På figur 7.2 ses grafer der beskriver virkningsgraden for det oprindelige system og det nye system. Figur 7.2: Virkningsgraden for den oprindelige klopolsgenerator og det nye system ved forskellige omdrejningstal. Det er ifølge målingerne ikke lykkedes at lave en forbedring af klopolsgeneratoren. Den gennemsnitlige virkningsgrad for de to systemer er henholdsvis 36 % for det oprindelige system og 9 % for det nye system. Virkningsgraden for det nye system kan, reelt set, godt være bedre, end hvad der fremgår af målingerne. Det skyldes, at målingerne kun er foretaget i et begrænset kørselsområde, og da effekterne som konverteren skal overføre, er meget små. Derudover er det kun værdierne fra tabellen, hvor V o ligger i intervallet fra 13 V til 14 V, som kan bruges i sammenligningen, da batteriet kræver denne ladespænding. 76
77 Kapitel 8 Konklusion Det kan konkluderes ud fra den gennemsnitlige testede virkningsgrad på kun 36 %, at der er et stort potentiale for forbedring af effektiviteten på klopolsgeneratoren. Ud fra en den målte back-emf i forsøg 3 udregnes den gennemsnitlige flux til 0, W b. Værdien benyttes i afsnit 4.2 til at udregne størrelse og styrke af en permanent magnet til klopolsgeneratoren. Da denne ikke kunne leveres indenfor projektets tidsperiode, blev der valgt en anden løsning. Udskiftningen af spolen realiseres ved at indsætte permanente magneter af typen sintret neodym. Der isættes 10 sintrede neodym magneter i cylindrisk form med en på længde 20 mm og 10 mm i diameter i jernkernen. Dette resulterer i et nødvendigt fluxareal på 1274 mm 2. Løsningen giver ikke mulighed for at opnå det nødvendige fluxareal pga. pladsmangel i jernkernen. Den valgte løsning svarer kun til ca. 60 % af den krævede magnetiseringsstyrke. Virkningsgraden for den nye generator er målt til mellem 4 % og 25 % med last. Generelt stiger virkningsgraden med højere omdrejningstal. Det bliver i projektet valgt at designe en ikke inverterende buck-boost konverter. Der anvendes, ud fra resultaterne i forsøg 2, en magnetiseringsstrøm på 2 A til at simulere en permanent magnet. Dette resulterer i en maksimal udgangsspænding på 104 V fra klopolsgeneratoren. Den ikke inverterende buck-boost konverter designes ud fra den maksimale indgangsspænding (104 V ) og den maksimal udgangseffekt (800 W ). For at sikre, at konverteren er i stand til at levere en konstant spænding til batteriet, designes regulering af konverterens duty cycle. Dette reguleringssystem bliver ikke bygget fysisk. Reguleringssystemet består af en PI-lead regulator. Regulatoren realiseres til elektriske komponenter, og komponenternes størrelse bliver udregnet. Ved at evaluere lukketsløjfe overføringsfunktionens step-respons fremgår, at det er muligt at kontrollere udgangsspændingen vha. regulering på konverterens duty cycle. Konverterens virkningsgrad er testet vha. manuel regulering af duty cyclen og er derfor ikke helt retvisende. Virkningsgraderne for konverteren ligger mellem 41 % og 80 %. På det samlede system, bestående af ombygget klopolsgenerator og konverter, opnås en virkningsgrader mellem 8 % og 11 % ved en ladespænding på 13 V til 14 V. Ud fra det ombyggede system kan konkluderes, at den ønskede forbedring af virkningsgraden ikke er opnået. Virkningsgraden for det ombyggede system er lavere, end for det oprindelige system. Udfra beregningerne for reguleringsenheden kan det konkluderes, at det er muligt at kontrollere ladespændingen til batteriet, ved regulering af konverterens duty cycle. 77
78
79 Kapitel 9 Perspektivering I dette kapitel gennemgås flere af de mulige årsager til, at virkningsgraden for den ombyggede klopolsgenerator ikke blev forbedret i forhold til virkningsgraden før ombygningen. Der gives desuden forslag til, hvordan der kan opnås bedre resultater. Der ses yderligere på, hvilke andre muligheder, der er for at forbedre brændstoføkonomien i personbiler, samt effektiviteten af disse forbedringer. Til sidst gives en vurdering af tidshorisonten på de alternative forbedringer. Det vil blive diskuteret, om det er rentabelt at forbedre konventionel teknologi i forhold til at investere i udviklingen af ny transport teknologi. 9.1 Kommentarer til projektet Det er diskutabelt, om den valgte klopolsgenerator har været ideel til forsøgene. I den forbindelse formodes, at intervallet for systemets virkningsgrad vil have ligget højere, med en klopolsgenerator af bedre kvalitet. Et forslag til at forbedre projektarbejdet er at benytte en fabrikeret permanent magnet generator med en høj virkningsgrad. På den måde vil projektarbejdet blive koncentreret om design og bygning af konverter samt regulering. Konverteren blev designet efter den første løsning med kun én permanet magnet. Derfor passede den byggede konverter ikke til den ombyggede klopolsgenerator med 10 indsatte permanente magneter. Virkningsgraden forventes derfor at blive forbedret, hvis: Konverteren designes efter, at der indsættes 10 permante magneter i klopolsgenerator Det i rapporten beregnede system bygges 9.2 Forbedring af bilers effektivitet Den opnåede systemvirkningsgrad på 8 % til 10 % er ikke en forbedring i forhold til det oprindelige system. Frem for at generere effekt til bilens elektronik vha. en generator, forskes i brug af termoelektriske elementer. Elementerne udnytter temperaturforskellen mellem udstødningsrøret og den omgivende luft til at generere elektrisk energi. Fordelen ved elementerne er, at de ikke optager mekaniske effekt fra motoren, men istedet udnytter overskudsvarme fra udstødningsrøret. Teknologien er stadig omkostningstung, men det forventes, at prisen vil falde, som følge af et større produktionsantal [Ingeniøren, 2009]. 79
80 KAPITEL 9. PERSPEKTIVERING Ud over eksemplet med termoelektriske elementer, findes andre alternative måder på at øge virkningsgraden af personbiler. Flere af løsningerne er kendte for bilfabrikanterne. At alternativerne ikke er implementeret skyldes primært, at det hidtil ikke har været rentabelt at installere de forskellige teknologier. Artiklen [Silva, Ross, Farias, 2008] beskriver fire forskellige metoder, hvormed effektiviteten i den amerikanske bilpark kan forbedres. De fire forbedringsforslag er: Regenerativ bremsning Lukning for brændstoftilførselen til motoren under motorbremsning Start/stop af motor Nedskalering af motor med kompensering vha. turboladning Det er hovedsagelig under bykørsel, at de nævnte teknologier er med til at øge effektiviteten. Artiklen analyserer og beregner effekten af de enkelte tiltag, både mht. brændstofforbrug og forurening. Der analyseres på en række ændringerne, som foretages på flere forskellige biler fra 980 til 1683 kg. De forskellige metoder vurderes til sidst i forhold til at opfylde målet på 125 g CO 2 /km, som ACEA (European Car Manufacturer Association) har sat som mål i Til vurdering af de enkelte metoder testes de med tre forskellige kørselsmønstre. Metoderne testes på NEDC (New European Driving Cycle), som normalt bruges til at vurdere europæiske bilers forurening. Derudover testes metoderne også på en meget befærdet hovedvej (IC19), samt ved en kørsel, som både har høj hastighed, acceleration og længde (MEC01). De enkelte kørselsmønstre ses udspecificeret i tabel 9.1. Tabel 9.1: Oversigt over de forskellige kørselsmønstre [Silva, Ross, Farias, 2008]. Køremønstre NEDC IC19 MEC01 Maksimal hastighed (km/h) ,6 130 Gennemsnitshastighed (km/h) 33, Distance (km) 11, Tid (s/min) 1180/ / /13 Maksimal acceleration (m/s 2 ) 1,06 1,14 2,40 Tomgangskørsel (s) Regenerativ bremsning Regenerativ bremsning handler om udnyttelse af den kinetiske energi ved opbremsning af et køretøj, som ellers vil blive omdannet til varme i bremsesystemet. Udnyttelsen foregår typisk ved brug af en ekstra stor generator/motor, som, under opbremsning, lader på et batteri. Den opladede energi i batteriet udnyttes efterfølgende under acceleration. Ulempen ved systemet er, at prisen for installering af en ekstra stor generator/motor og batteri, er meget høj. Dertil kommer vægtforøgelsen af bilen pga. den ekstra store generator/motor og batteri. 80
81 9.2. FORBEDRING AF BILERS EFFEKTIVITET Figur 9.1: Regenerativ bremsning ved en personbil på 1375 kg og 100 % optaget bremseenergi [Silva, Ross, Farias, 2008]. Figur 9.2: Regenerativ bremsning ved en personbil på 1375 kg og 50 % optaget bremseenergi [Silva, Ross, Farias, 2008]. På figur 9.1 og 9.2 ses brændstofbesparelsen ved installering af regenerativ bremsning ved de forskellige kørselsmønstre. Figur 9.1 viser brændstofbesparelsen for en bil, hvor det alm. bremsesystem ikke er i brug. Det vil sige, at 100 % af bremseenergien oplagres i batteriet. Denne løsning kræver en stor batterikapacitet, hvilket medfører stor vægtforøgelse. Figur 9.2 viser brændstofbesparelsen, når 50 % af bremseenergien oplagres. De restende 50 % afsættes som varme i det almindeligt bremsesystem. For at der er en gevinst ved at bruge dette system, skal den samlede effektivitet af systemet være ca. 50 %. Det vil sige, at effektiviteten af systemet skal være på mindst 71 % fra batteri til hjul, og igen mindst 71 % fra hjul til batteri. Med virkningsgrader lavere end ca. 50 % forsvinder gevinsten grundet den øgede vægt. Artiklen vurderer, at prisen til installering af et regenerativ bremsesystem er $600 - $2600, afhængigt af bilens størrelse. Til sammenligning koster en fuld konvertering til hybrid $ $ Lukning for brændstof Ved denne metode lukkes for brændstofstilførselen, når bilen motorbremser. Teknologien bag lukning af brændstofstilførslen er forholdsvis enkel, og findes allerede implementeret i næsten alle nye europæiske biler. I amerikanske biler er det langt fra implementeret i alle biler. Afhængigt af størrelsen på bilen og køremønsteret kan der opnås 5 % - 10% brændstof- og CO 2 - besparelse. Udgiften til systemet er lav, da det kun kræver ekstra sensorer og en kontrolenhed. Installationsomkostningen er $50 - $ Start/stop af motor Start/stop mekanismen kendes eksempelvis fra VW Lupo 3L, hvor motoren slukker, når der holdes for rødt lys eller i kø. Så snart bremsen slippes, starter motoren igen. Det er endnu kun få biler, hvor systemet er implementeret, men der ses en stigning. Systemet består af en integreret startermotor/generator. Denne mekanisme kan give brændstofs- og CO 2 -besparelser på 8% - 9%. Ved ren landevejskørsel har systemet ingen effekt. Prisen til installering er $200 - $
82 KAPITEL 9. PERSPEKTIVERING Nedskalering af motor Ved nedskalering af en motor med f.eks. 20%, bliver en personbil med en motor på eksempelvis 1,6 l. nedskaleret til 1,28 l. Til kompensation monteres en turbolader/kompressor så ydelsen forbliver den samme. Det hænger sammen med, at motorens effektivitet øges pga. tryksætning af indsugningsluften. I artiklen undersøges både 20% og 40% nedskaleringer. På figur 9.3 ses, hvor stor en brændstofsbesparelse der opnås ved nedskaleringen. Ved nedskalering på 20 % ses besparelser på 6% - 12% afhængig af bilernes kørselsmønstre. Den største besparelse findes ved IC19, som er den strækning med lavest gennemsnitsfart. Samme tendens ses ved en nedskalering på 40 %. Her er der en brændstofbesparelse på op til 21% ved kørsel på IC19. Figur 9.3: Viser effekten ved nedskalering af motor for en personbil (1,6 L) på 1375 kg [Silva, Ross, Farias, 2008]. Generelt ses, at brændstofsbesparelsen bliver højere ved lavere gennemsnitshastighed. Hovedomkostningen ved systemet er delene omkring tuboladningen, som koster $500 - $ Kombination Ved en kombination af de forskellige løsninger opnås endnu større besparelser. For en bil på 1375 kg vurderes de fire gennemgåede teknologier at give en brændstofbesparelse på 17 % til 41% afhængigt af kørselsmønster. På figur 9.4 ses CO 2 -udledningen i gram pr. km for fem forskellige personbiler i størrelser fra 980 kg til 1683 kg. Kørselsmønsteret er NEDC. Den stiplede linie viser ACEA s mål på 125 g CO 2 /km i år Ud over brændstofs- og CO 2 -besparelse ses også en nedgang i udslippet af drivhusgasser som HC, CO og NO x. Da beregningerne brugt under artiklens udarbejdelse er ideelle, vurderes de reelle besparelser at være lavere. 82
83 9.3. TIDSHORISONT Figur 9.4: CO 2 -udledningen før og efter installering af de fire teknologier i personbiler af forskellige størrelser [Silva, Ross, Farias, 2008]. 9.3 Tidshorisont Rapporten [Kromer, Heywood, 2007] har en lignende konklusion. Med de teknologier, der er til rådighed i dag, kan energiforbruget sænkes og dermed mindskes udledningen af skadelige partikler til atmosfæren væsentligt. Det kan, ved de tre sidste løsninger, opnås ved at øge prisen på en personbil med $700 - $1200 [Silva, Ross, Farias, 2008]. I konklusionen af [Kromer, Heywood, 2007, s. 134] vurderes, at konventionelle forbrændingsmotorer stadig har indflydelse, med følgende kommentar: Because these technologies will comprise the bulk of vehicle-miles during this period (through 2030), near-term reductions in petroleum consumption and green-house-gas emissions will need to come from improving conventional technologies, not from deploying new powertrains. Det skal understreges, at rapporten [Kromer, Heywood, 2007] er udarbejdet for Ford Motor Company, og det må have indflydelse på interessen i at videreudvikle forbrændingsmotoren. Det forventes, at der i den nærmeste fremtid sættes fokus på elforbruget i biler. Der forudses en stigning fra 1 kw til 5 kw i det gennemsnitslige elforbrug i biler [Emadi, 2005]. Klopolsgeneratoren er kun fordelagtig op til ca. 5 kw, da den ellers bliver for stor til motorrummet. Med udgangspunkt i en tidshorisont på ca. 20 år, for biler med forbrændingsmotorer, vurderes, at forbedringer af virkningsgraden, samt minimering af forurening, er interessant. Det er samtidig uvist, hvornår fremtiden vil blive domineret af ny transport teknologi. 83
84
85 Litteratur Basak [1996]. Amitava Basak; 1. udgave; Clarendon Press, Oxford; ISBN: Boldea [2006]. Ion Boldea, Variable Speed Generators, Taylor & Francis Group, ISBN: Ebert [1998]. Hans Ebert; Quasistatiske elektriske og magnetiske felter 3. udgave; Institut for elektroniske systemer, Aalborg Universitet; ISBN: Emadi [2005]. Ali Emadi; Handbook of Automotive Power Electronics and Motor Drives. Emadi, Ehsani, Miller [2004]. Ali Emadi, Merhdad Ehsani, John M. Miller: Vehicular Electric Power Systems - Land, Sea, Air and Space vehicles, Marcel Dekker, ISBN: Emu.dk [2008]. Illustrationer til magnet afsnit, Dato tilgået: URL: Erickson, Maksimovic [1998]. Erickson, R. W., Maksimovic, D.: Korrektion til Fundamentals and powerelectronics; 1. udgave. Erickson, Maksimovic [2004]. Erickson, R. W., Maksimovic, D.: Fundamentals and powerelectronics; 2. udgave, ISBN: Færdselsstyrelsen [2004]. Forside» Køretøjer» Brændstofforbrug» EU s strategi og målsætning, dato tilgået: URL: Færdselsstyrelsen [2007]. Energiinformation om nye danske personbiler - Udvikling , Færdselsstyrelsen, ISBN: URL: ug/energiinformation_om_nye_danske_personbiler_2006.pdf Ingeniøren [2009]. Japansk peltier-element er klar til at udnytte bilers spildvarme, dato tilgået: URL: Irwin, Nelms [2008]. Irwin, D. J., Nelms, M. R.: Basic Engineering Circuit Analysis; 9. udgave, ISBN: Jewett, Serway [2008]. John W. Jewett, Raymond A. Serway: Physics for Scientists and Engineers - with Modern Physics, Thomson - Brooks/Cole, ISBN: Kromer, Heywood [2007]. Matthew A. Kromer & John B. Heywoo; Electric Powertrains: Opportunities and Challenges in the U.S. Light-Duty Vehicle Fleet. Metglas [2009]. Powerlite C-Cores, Technical Bulletin, dato tilgået: URL: 85
86 LITTERATUR NI.com [2009]. NI USB-621x User Manual, dato tilgået URL: Nybo [2004] Nybo, J.,Ingeniørhøjskolen Århus: Design Via Frequency Response; 2 revidering Phillips, Harbor [2000]. Phillips, Charles L., Harbor, Royce D.: Feedback control systems 4. udgave, ISBN: Ritchie [2009]. Ritchie, E.; Samtale , Aalborg Universitet. Schaltz [2009]. Schaltz, E.; Vejledermøder , Aalborg Universitet. Sen [1997]. Paresh Chandra Sen: Principles of Electric Machines and Power Electronics, 2. udgave,isbn: Silva, Ross, Farias [2008]. Carla Silva, Marc Ross, Tiago Farias; Analyses and simulation of low cost strategies to reduce fuel consumption and emmisions in cinventionaæ gasoline light-duty vehicles. Statistikbanken.dk [2009]. Bestanden af personbiler pr. 1. januar efter tid, Dato tilgået: URL: height=400&gr_fontsize=11&menu=y&planguage=0&pxfile= bil11.px&won load=600&honload=400&rotate= Whaley, Soong, Ertugrul [2004]. D. M. Whaley, W. L. Soong, N. Ertugrul: Extracting more power from the lundell car alternator, University of Adelaide, Australien. 86


87 Appendiks A Forsøgs Journaler Udgangspunktet for alle forsøg i rapporten er en fast forsøgsopstilling samt dataopsamling vha. programmet Labview. Den generelle forsøgsopstilling og dataopsamling beskrives først, hvorefter de 5 forskellige forsøg, der foretages på standen, beskrives. Forsøg 1-5 beskrives i kronologisk rækkefølge efter beskrivelsen af den faste forsøgsopstilling. Der vil være små ændringer i forhold til den generelle forsøgsbeskrivelse, og disse beskrives forud for hvert enkelt forsøg. Hvert forsøg beskrives med formål, forsøgsbeskrivelse, fremgangsmåde og resultater. Udstyr brugt til de forskellige forsøg er listet i Appendiks A.6.5 med AAU nr. A.1 Forsøgsopstilling Formålet med opstillingen er at kunne foretage målinger på en klopolsgenerator med og uden belastning. Klopolsgeneratoren er beskrevet i afsnit 2. Til at drive generatoren, benyttes en 2,5 kw DC-motor med feltvikling, se figur A.1. Derudover benyttes en Torquemaster til måling af moment og omdrejningstal, se figur A.2. Figur A.1: Generel forsøgsopstilling. Figur A.2: Torquemaster til måling af moment og omdrejningstal. A.1.1 DC-motor Der benyttes to strømforsyninger til at drive DC-motoren; en mindre strømforsyning som leverer op til 6 A til DC-motorens feltvikling, og en kraftig strømforsyning, som kan levere op til 91 A og 36 V til DC-motorens rotorvikling. Da DC-motoren kun bruges til at levere mekanisk effekt til generatoren, måles DC-motorens effektforbrug ikke. 87

88 APPENDIKS A. FORSØGS JOURNALER A.1.2 Torquemaster Mellem DC-motoren og generatoren sidder et Torquemaster måleinstrument, se figur A.2. Torquemasteren måler bl.a. overført moment (M) og omdrejningstal (ω). Torquemasteren forsynes med 24 V fra en strømforsyning. Udgangssignalerne fra torquemasteren måles vha. Labview og hardwaren; en NI-DAQmx boks. Forbindelserne ses på figur A.3. For at undgå højfrekvent støj på signalet fra Torquemasteren indsættes et low-pass filter på momentsignalet, bestående af en 100 µf kondensator og en 0,5 Ω modstand. Filteret frasorterer alt over 3,2 khz. Desuden indsættes modstand på alle indgange på DAQmx boksen, da der måles differentielt, se figur A.3 [NI.com, 2009]. Figur A.3: Forbindelsesdiagram mellem Torquemaster og NI-DAQmx (type USB-6215). A.1.3 Behandling af signaler fra torquemaster i Labview Dette underafsnit beskriver, hvilke formler der benyttes for at opbygge Labview programmet til opsamling af data fra Torquemasteren. Data bruges til beregning af den mekaniske effekt (P mek ) ind i klopolsgeneratoren. Labviewprogrammet kan ses på figur A.4. Den mekaniske effekt er et produkt af vinkelhastighed og moment. Figur A.4: Labview program til opsamling af data fra torquemaster. 88

89 A.1. FORSØGSOPSTILLING Moment Det overførte moment, mellem DC-motor og generator, resulterer i en spænding på udgang B, se figur A.3, i forholdet 0,1 NV m. Dvs. Torquemasteren afsender 0,1 V for hver newtonmeter, der måles. Spændingen på udgnag B forbindes til analog indgang AI10. DC-værdien af denne spænding ganges med 10, for at opveje spændingsforholdet. Dermed fås momentet i newtonmeter. Vinkelhastighed En fuld omdrejning af akslen resulterer i 30 pulser af 5V på udgang F. Denne udgang tilkobles en digital counter indgang PFI2, som opsættes til at aflæse frekvens på signalet. Denne frekvens divideres h i r med 30, så omdrejningstallet fås i H z. For at kunne aflæse omdrejningstallet i RPM omd ganges mi n h i s frekvensen med 60 mi n, og tallet afrundes til nærmeste hele tal. Omdrejningstallet i H z ganges med 2π og hermed fås vinkelhastigheden, ω, se formel A.1 ω = f 2 π ω f Vinkelhastighed Frekvens h (A.1) i r ad s 1 s For at finde den mekaniske effekt der overføres til generatoren benyttes formel A.2, og tallet afrundes herefter til nærmeste hele tal. P mek = M ω P mek M Mekanisk effekt Moment (A.2) [W ] [N m] Effektberegning Effekten, som leveres af generatoren, findes ved at måle strøm og spænding mellem generator og batteri. Figur A.5: LEM-modul til bestemmelse af strøm i ledning. Til måling af generatorens output strøm (I o ) bruges en LEM current transducer, der omslutter ledning fra B+ på generatoren og til pluspolen på batteriet, se figur A.6. Når en strøm (I o ) gennemløber ledningen, induceres en strøm i LEM-modulet, der er 2000 gange mindre. Se modulets påskrevne data. 89
90 APPENDIKS A. FORSØGS JOURNALER For at finde denne strøm måles først spændingen over en shuntmodstand, der er monteret på LEMmodulet, hvorefter strømmen kan beregnes vha. Ohms lov. Når strømmen fra LEM-modulet kendes, multipliceres denne med 2000, og strømmen (I o ) i ledningen kendes. Derved benyttes følgende formel: ( ) Vshunt I o = 2000 (A.3) R shunt I o Strøm ud af generator [A] V shunt Spænding over shuntmodstand [V ] R shunt Ohmske modstand i shuntmodstand [Ω] Figur A.6: Forbindelser mellem DAQmx, LEM-modul og spændingsdeler. For at drive LEM-modulet kræves en spænding på ± 15 V, som leveres af en lille DC/DC konverter. Denne får 24 V input fra en standard strømforsyning. Generatorens outputspænding (V bat ) måles vha. en spændingsdeler mellem batteriets poler, se figur A.6. Signalerne fra spændingsdeleren og LEM-modulet måles vha. en NI-DAQmx boks og et Labview program, se figur A.7. Data fra NI-DAQmx boksen trækkes ind fra venstre, hvor strømmen (I o ) findes ved at multiplicere med 2000 og dividere med modstanden, der måles over (100 Ω). Spændingen (V bat ) findes ved at multiplicere spændingen fra spændingsdeleren med 2. Multipliceres V bat og I o findes effekten hvormed der lades på batteriet: P = V bat I o (A.4) P Effekt [W ] I o Strøm [A] 90
91 A.1. FORSØGSOPSTILLING Figur A.7: Labview program til opsamling af data fra LEM-modulet og spændingsdeleren. Afladning af batteri For at kunne sammenligne flere efterfølgende test, kræves det, at ladestanden i batteriet skal være den samme hver gang forsøget startes. Hertil skrives et program i Labview så på- og afladningsenergien kan beregnes. Efter hver endt test aflades batteriet ned til udgangspunktet igen. Til afladning af batteriet bruges to effektmodstande (max 10 A). Effektmodstandende er koblet i parallelforbindelse, og deres ohmske modstand er indstillet, så strømmen igennem hver af dem ikke overstiger 10 A. Se figur A.8. Figur A.8: Opkobling af effektmodstande. Afladningen overvåges vha. af et Labview program, som ses på figur A.9. Spænding over batteriet og strømmen der aflades med, aflæses. Værdierne omregnes til ladeeffekt og samlet mængde ladet watttimer. Til beregning af ladet watt-timer bruges en tidsfunktion i Labview, som ikke er vist på figur A.9. Rent praktisk bruges det samme LEM-modul og den samme spændingsdeler til måling af strøm og spænding, der lades med. Til at beregne effekten hvormed der aflades, bruges formel A.4. Figur A.9: Labview program til beregning af afladet effekt. 91
92 A.2 Forsøg 1 - Klopolsgeneratorens virkningsgrad APPENDIKS A. FORSØGS JOURNALER A.2.1 Formål Den gennemsnitlige virkningsgrad på en standard klopolsgenerator bestemmes i forsøg 1. Der tages ikke hensyn til det reelle køremønster for en klopolsgenerator i en bil. Forsøg 1 består af fire test. A.2.2 Opstilling Til styring af strømmen ind i generatorens rotor (magnetiseringsstrømmen) bruges en almindelig laboratoriestrømforsyning, som kan levere op til 6 A. Strømmen kan derfor justerers alt efter hvilken styrke der ønskes på rotorfeltet, hvilket har stor betydning for ladeeffekten. A.2.3 Fremgangsmåde For at finde den samlede virkningsgrad for generatoren, er der foretaget tre test i omdrejningsintervallet, ca omdr/min til 6000 omdr/min. Der benyttes tre forskellige ladespændinger på henholdsvis 13, 13,5 og 14 V. Efter de tre test udvælges ladespændingen på 13 V. Testen ved 13 V gentages herefter til verificering af resultaterne. Testen angives som test 4 på figur A.10. Det er ikke praktisk muligt at teste ved mere end ca omdr/min, da DC-motoren ikke er kraftig nok. For hvert målepunkt noteres omdrejningstallet, generatorens magnetiseringsstrøm og magnetiseringsspænding, mekanisk effekt ind i generatoren og elektrisk effekt ud af generatoren. Ud fra den mekaniske effekt ind, fratrukket magnetiseringseffekten fra figur A.11, og den leverede elektriske effekt ud af generatoren, kan virkningsgraden beregnes: P g en η = P mek P mag (A.5) η Virkningsgrad [ ] P g en Elektrisk genereret effekt [W ] P mek Mekanisk effekt ind i generator [W ] P mag Magnetiseringseffekt [W ] A.2.4 Resultater Resultater fra de fire test i forsøg 1 gennemgås i dette afsnit vha. de fire grafer se A.10 til A.13. Tilført og afsat effekt Figur A.10 giver et overblik over den mekaniske effekt, der er genereret af DC-motoren, og den elektriske effekt, som generatoren leverer til batteriet. Da der er brugt en laboratoriestrømforsyning til at magnetisere rotoren med, skal magnetiseringseffekten fra figur A.11, trækkes fra den mekaniske effekt ind. Test 1 og test 4 (13 V): Test 1 foregår ved et næsten afladet batteri. Inden test 4 påbegyndes tilføres ca. 150 Wh til batteriet, som svarer til ca. 1/4 af batteriets samlede kapacitet. Dette gøres for at undersøge, om batteriets lade tilstand påvirker resultaterne. Forskellen på test 1 og test 4 er derfor, at batteriet optager en større effekt, når det er næsten afladet. Det ses ved, at graferne for test 1 ligger 92
93 A.2. FORSØG 1 - KLOPOLSGENERATORENS VIRKNINGSGRAD over graferne for test 4. Ud fra graferne ses, at der bliver afsat en elektrisk effekt svarende til under 40 % af den tilførte mekaniske effekt. Test 2 (13,5 V) og test 3 (14 V): Test 2 og test 3 er testet ved samme batteritilstand, som ved test 4. Test 2 foregår ved en ladespænding på 13,5 V, hvilket giver en større afsat effekt i batteriet end test 1 og test 4. Test 3 giver den største afsatte elektriske effekt på ca. 800 W Figur A.10: Den tilførte mekaniske effekt, og den genererede elektriske effekt. Test 3 kørte til ca omdr/min, da DC-motoren ikke kunne levere mere end 2500 W mekanisk effekt. Samtidig oversteg den afsatte elektriske effekt generatorens maksimale effekt. Virkningsgraden falder tydeligvis også under test 3, til omkring 30 %. Generelt ses at når den effekt der trækkes af batteriet stiger, vil det resultere i en større forskel mellem den mekaniske tilførte effekt og den elektriske afsatte effekt. Det fremgår også af figur A.13 over virkningsgraden for klopolsgeneratoren. Magnetisering af rotorvikling Figur A.11: Den tilførte effekt til generatorens rotorvikling. 93
94 APPENDIKS A. FORSØGS JOURNALER Figur A.11 viser den effekt, der bliver tilført generatorens rotor. Det ses, at effekten falder, når omdrejningstallet stiger. Men for test 3 kunne det tyde på, at generatorens omdrejningstal har været for lille, set i sammenhæng med størrelsen på det magnetiske felt. Figur A.12 viser magnetiseringsstrømmen som tilføres generatorens rotorvikling. Resultatet bruges til at vurdere, hvor stor en strøm der kræves for at skabe magnetfeltet i rotoren. Derudover bruges resultatet til forsøg 2, Appendiks A.3, hvor der undersøges, hvilke output den modificerede klopolsgenerator vil give. Figur A.12: Strømmen i generatorens rotorvikling. Virkningsgrad for klopolsgeneratoren På figur A.13 ses virkningsgraden for de forskellige test, som funktion af omdrejningstallet. Til beregning af generatorens virkningsgrad bruges formel A.5. Figur A.13: Virkningsgrad for generatoren ved forskellige omdrejningstal. Test 1 og test 4 ligger begge fra 30 % til 42 % alt efter omdrejningstallet. Test 2 ligger på samme linie, men test 3 afviger fra de andre. Det skyldes højest sandsynlig for høj ladespænding ved for lav omdrejningstal. Generatoren er i følge dets datablad beregnet til hastigheder 2,39 gange højere end den motor, den er 94
95 A.2. FORSØG 1 - KLOPOLSGENERATORENS VIRKNINGSGRAD tiltænkt. En sådan motor vil typisk køre mellem 900 og 5000 omdr/min, hvilket giver omdrejningstal fra omdr/min til omdr/min. Der kan desværre kun gættes på, om resultaterne ville have set anderledes ud, hvis det havde været muligt at teste generatoren ved et omdrejningstal højere end 6000 omdr/min. Ud fra resultaterne ses imidlertidig ingen tendens til forbedring ved højere omdrejningstal. Endeligt resultat: Den gennemsnitlige virkningsgrad beregnes til 36 %, og er beregnet ud fra gennemsnittet af test 1, 2, 3 og 4. Resultatet er tydeligvis lavere end projektforeslagets estimerede virkningsgrad på 60 %. 95
96 APPENDIKS A. FORSØGS JOURNALER A.3 Forsøg 2 - Bestemmelse af maksimal spænding til konverter A.3.1 Formål Formålet med forsøg 2 er at undersøge, hvilke spændinger konverteren skal designes efter. Det ønskes at finde den maksimale udgangsspænding for generatoren. Forsøg 2 består af 5 test. Den første del af forsøg 2 er uden last, og anden del af forsøg 2, test 3, 4 og 5, foregår med varierende last på generatoren. A.3.2 Fremgangsmåde Til forskel fra den generelle forsøgsbeopstilling, se afsnit A.1, tilkobles ingen last på klopolsgeneratoren i test 1 og test 2. Samtidig er magnetiseringsstrømmen fast under hver test, henholdsvis 2 og 2,7 A. Dette gøres udfra en vurdering af magnetiseringsstrømmene fra forsøg 1, figur A.12. Over generatorens terminaler monteres et multimeter, til måling af udgangsspændingen. Under test 3, 4 og 5 tilkobles de to effektmodstande, som også bruges til afladningen af batteriet under forsøg 1. Se figur A.8. Den ohmske modstand i effektmodstandende indstilles til at den maksimale strøm igennem dem ikke overstiger deres begrænsning på 10 A, i henhold til ohms lov. Spændingen over generatoren og dens omdrejningstal noteres. A.3.3 Resultater Test 1 og 2: På figur A.14 ses, hvordan spændingen over terminalerne stiger med omdrejningstallet. Test 1 er testet ved den højeste magnetiseringsstrøm, hvilket også kommer til udtryk ved en høj spænding. Test 1 starter fra 17 V ved 1000 omdr/min og stiger op til 127 V ved knap 7000 omdr/min. I test 2 benyttes en magnetiseringsstrøm på 2 A, resultere i en spænding på op til 104 V. Det hænger sammen med, at en lavere magnetiseringsstrøm medfører et svagere magnetfelt i rotoren, selvom omdrejningstallet er det samme som i test 1. Der ses en uregelmæssighed ved 4000 omdr/min, som skyldes en fejl i målingerne. Figur A.14: Spænding målt over generatorens terminaler. Test 3, 4 og 5: Figur A.15 viser udgangsspændingen som funktion af omdrejningstallet. Spændingsintervallet er lavere, da der nu er last tilkoblet. Den maksimale strøm under de 3 test er 19 A. Det ses, at 96
97 A.3. FORSØG 2 - BESTEMMELSE AF MAKSIMAL SPÆNDING TIL KONVER- TER de tre test ligger meget tæt, og den højeste spænding måles til 60 V. Figur A.15: Udgangsspænding ved forskellig last. Det vurderes at en magnetiseringsstrøm på 2 A er passende til brug for at simulere en permanent magnet i spolen. Det resultere i en maksimal spænding på 104 V. Denne spænding bruges i konverterafsnit
98 APPENDIKS A. FORSØGS JOURNALER A.4 Forsøg 3 - Bestemmelse af magnetisk flux vha. back-emf A.4.1 Formål Formålet med dette forsøg er, at måle back-emf en i en spole indsat i statoren. Den målte værdi anvendes til at estimere størrelsen af en permanent magnet, der indsættes i rotoren, som erstatning for magnetiseringsviklingen. Størrelsen af magneten kan bestemmes udfra teorien i afsnit 4.2 og resultatet af udregningen fremgår ligeledes af afsnit 4.2. A.4.2 Fremgangsmåde Der benyttes samme opstilling som i appendiks A.1. Generatorens rotor magnetiseres med en konstant strøm på 2 A. Forsøget gennemføres 2 gange; først med ubelastet generator, og derefter med en effektmodstand tilkoblet, som giver en belastning. Da statorviklingerne i generatoren er viklet på en kompleks måde, er det vanskeligt at finde et viklingsantal. Derfor indsættes en ekstra vikling i noterne i statoren. Viklingen, der indsættes i statoren, spænder over en pol og har 4 vindinger, (N=4), se figur A.16. Peak-spændingen over viklingen måles med et oscilloskop ved forskellige omdrejningstal. Figur A.16: Statoren, med isat vikling til måling af back-emf. A.4.3 Resultater Signalet fra oscilloscopet danner tilnærmelsesvis en sinuskurve. På figur A.17 ses kurven for back- EMF en over den indsatte spole, når generatoren køres ubelastet, ved et omdrejningstal på 2550 o/mi n. Figur A.17: back-emf en over den indsatte spole i statoren uden belastning af generator, ved et omdrejningstal på 2550 RPM. 98
99 A.4. FORSØG 3 - BESTEMMELSE AF MAGNETISK FLUX VHA. BACK-EMF Resultaterne fra målingerne med oscilloscopet fremgår af tabel A.1 og tabel A.2. Tabel A.1: Målte værdier fra forsøg uden belastning på generatoren. Spændinger og frekvens er målt vha. oscilloscop over den indsatte statorvikling. RPM E MF Peak peak [V] E MF A [V] Frekvens [Hz] ω [ r ad s ] ,95 0, ,52 1, ,05 1, ,63 1, ,18 2, ,73 2, ,24 2, ,78 2, ,22 3, Tabel A.2: Målte værdier fra forsøg med belastning på generatoren. Spænding og frekvens er målt vha. oscilloscop over den indsatte statorvikling, og spænding og strøm er målt vha. multimeter over terminalerne på generatoren. RPM E MF Peak peak [V] E MF A [V] ω [ r ad s ] Spænding [V] Strøm [A] Effekt [W] ,98 0, , , ,54 1, ,42 27,2 174, ,13 1, , , ,63 1, ,7 39,7 385, ,06 2, , ,9 Ud fra værdierne for back-emf en for den ubelastede generator, kan der tegnes en graf, hvor hældningen angiver fluxen gennem hvert polpar. Grafen ses på figur A.18. Figur A.18: Back-EMF en delt med antallet af vindinger over vinkelhastigheden. Hældningen angiver fluxen gennem hvert polpar i rotoren. Funktionen beskriver den liniære regressionslinie, som har en god overenstemmelse med målepunkterne (R 2 0,95). For at finde den samlede flux, der løber gennem jernkernen i rotoren, skal hældningen på regressionslinien ganges med antallet af polpar, dvs. at der skal ganges med seks. Dette giver en samlet flux 99
100 APPENDIKS A. FORSØGS JOURNALER på 0, Wb. I beregningen af magneten benyttes en gennemsnitsværdi for fluxen, som beregnes udfra de ni målepunkter (omdrejningstal). Den gennemsnitlige flux er 0, Wb. Det vil sige, at hældningen giver en værdi der er 10% mindre end gennemsnitsværdien. Det kan bl.a. skyldes, at regressionslinien ikke skærer i origo, som den burde, da der ikke vil blive induceret spænding i spolen, når rotoren står stille. 100
101 A.5. FORSØG 4 - BESTEMMELSE AF MODIFICERET GENERATORS UD- GANGSSPÆNDING OG VIRKNINGSGRAD A.5 Forsøg 4 - Bestemmelse af modificeret generators udgangsspænding og virkningsgrad A.5.1 Formål Forsøget er opdelt i to dele: 1. At undersøge hvilke maksimale udgangsspændinger der kan forventes, ved forskellige omdrejningstal. 2. At undersøge hvilke udgangsspændinger, der kan forventes når den modificerede generator belastes, og hvilken virkningsgrad klopolsgeneratoren har med disse belastninger. A.5.2 Opstilling Forsøget benytter den generelle forsøgsopstilling, som er beskrevet i appendiks A.1. Der måles på den ombyggede klopolsgenerator med isatte permanent magneter. Maksimalspændingen findes uden belastning af generatoren. I anden del af forsøget tilkobles en effektmodstand til generatorens udgangsterminaler. For begge del-forsøg måles spændingen med et multimeter, og i anden del af forsøget benyttes endnu et multimeter til måling af strøm, så effekten kan beregnes. A.5.3 Fremgangsmåde Første del af forsøget foretages ved at køre generatoren ved forskellige omdrejningstal, med ca. 500 RPM interval. Generatorens udgangsspænding måles ved hvert omdrejningstal. For hvert målepunkt noteres omdrejningstallet og generatorens udgangsspænding. Testen gentages for at verificere målingerne. Anden del af forsøget foregår på samme måde som første del, men ved hvert målepunkt noteres, omdrejningstal, mekanisk effekt ind, spænding ud, og strøm ud. A.5.4 Resultater 1. del De målte værdier fra første del af forsøget er noteret i tabel A.3 og illustreret på en graf på figur A.19 Tabel A.3: Målte værdier fra forsøg uden belastning på generatoren. RPM V g [V] , , , , , , , , , , ,3 [omdr/mi n] 101
102 APPENDIKS A. FORSØGS JOURNALER Figur A.19: Udgangsspændingen for den ombyggede generator, uden belastning. Det ses af grafen på figur A.19, at sammenhængen mellem omdrejningstallet og generatorens udgangsspænding er lineær når generatoren ikke belastes. A.5.5 Resultater 2. del Måleresultater og beregnede værdier for anden del af forsøget ses i tabel A.4, A.5 og A.6. Tabel A.4: Målte værdier fra forsøg med en 3,5 Ω belastning på generatoren. RPM V g I g P mek P el η g ener ator [omdr/mi n] [V ] [A] [W ] [W ] [%] ,5 1,1 88 3,9 4, ,8 1, ,8 7, ,1 2, ,0 8, ,2 2, ,9 10, ,2 3, ,5 12, ,1 3, ,8 13, ,0 4, ,8 16, ,0 4, ,4 16, ,8 5, ,9 19, ,4 6, ,6 19, ,0 8, ,0 28,6 102
103 A.5. FORSØG 4 - BESTEMMELSE AF MODIFICERET GENERATORS UD- GANGSSPÆNDING OG VIRKNINGSGRAD Tabel A.5: Målte værdier fra forsøg med en 1,4 Ω belastning på generatoren. RPM V g I g P mek P el η g ener ator [omdr/mi n] [V ] [A] [W ] [W ] [%] ,0 2,2 96 6,5 6, ,9 3, ,7 10, ,8 4, ,0 14, ,5 6, ,0 17, ,0 7, ,0 19, ,5 8, ,2 21, ,8 9, ,5 23, ,5 10, ,4 24,5 Tabel A.6: Målte værdier fra forsøg med en 0,2 Ω belastning på generatoren. RPM V g I g P mek P el η g ener ator [omdr/mi n] [V ] [A] [W ] [W ] [%] ,3 7, ,0 8, ,9 9, ,1 8, ,1 11, ,1 8, ,3 12, ,6 8, ,4 13, ,2 8,2 Figur A.20: Den ombyggede generators virkningsgrad ved forskellige omdrejningstal og tre forskellige ohmske belastninger. Figur A.20 viser de beregnede virkningsgrader for den ombyggede klopolsgenerator. Virkningsgraderne ligger en del under hvad der normal forventes af elektriske maskiner. Dette kan skyldes at magneterne ikke er kraftige nok til at erstatte magnetiseringsspolen. Dette underbygges af første del af forsøget, hvor udgangsspændingerne, uden belastning, er meget lavere end de målte spændinger i 103
104 APPENDIKS A. FORSØGS JOURNALER forsøg A.3, som dimensionering af magneten bygger på. Udgangseffekten, som generatoren afgiver, er også langt mindre end de 751 W som beskrives i databladet for den oprindelige generator. Når generatoren ikke leverer fuld effekt, vil det mekaniske tab i generatorens lejer og deslige have større betydning i forhold til virkningsgraden. Udgangsspændingen fra generatoren varierer mellem 1,3 V og 23 V, ved belastning. Dette indikerer at der er behov for en konvertering af spændingen for at kunne lade på et batteri med en fast ladespænding på 14 V. 104
105 A.6. FORSØG 5 - BESTEMMELSE AF MODIFICERET GENERATORS VIRK- NINGSGRAD A.6 Forsøg 5 - Bestemmelse af modificeret generators virkningsgrad A.6.1 Formål Formålet med dette forsøg er at beregne en samlet virkningsgrad for klopolsgeneratoren, tilsluttet den konstruerede buck-boost konverter. Forsøget foretages for, at kunne sammenligne resultatet med virkningsgraden for det oprindelige system. A.6.2 Opstilling Forsøget benytter den generelle opstilling fra forsøgsbeskrivelsen i appendiks A.1. Der måles på den ombyggede klopolsgenerator, nåt den fremstillede buck-boost konverter benyttes til styring af ladespændingen. Udgangsterminalerne på generatoren forbindes til konverterens indgangsterminaler (V g ). Konverterens udgangsterminaler (V o ) forbindes til en effektmodstand. Der måles både strøm og spænding på begge sider af konverteren med fire multimetre. A.6.3 Fremgangsmåde For at kunne beregne virkningsgraden for systemet ved forskellige omdrejnings tal, startes forsøget ved 1000 RPM, og gentages med intervaller på ca. 500 RPM, op til så høje omdrejningstal som det kan lade sig gøre i teststanden. Testen gentages for at verificere målingerne. Det tilstræbes at udgangsspændingen (V o ) så vidt muligt bliver på 14 V. For hvert målepunkt noteres; RPM, udgangsspænding (V g ), udgangsstrøm (I g ), ladespænding (V o ), ladestrøm (I o ), Duty-cycle og mekanisk effekt ind i generatoren (P mek ). Beregnede værdier: Generatorens afgivne elektriske effekt (P el g ), og konverterens afgivne elektriske effekt (P el o ) beregnes udfra formel A.6. P el = U r ms I r ms (A.6) Generatorens virkningsgrad (η g en ) beregnes udfra formel A.7. η g en = P el g P mek Konverterens virkningsgrad beregnes udfra formel A.8. η konv = P el o P el g (A.7) (A.8) System-virkningsgraden beregnes udfra formel A.9. η s y s = P el o P mek (A.9) 105
106 APPENDIKS A. FORSØGS JOURNALER A.6.4 Resultater De målte værdier for forsøget er noteret i tabel A.7 Tabel A.7: Målte værdier fra forsøget med generator og konverter. RPM V g I g V o I o P mek P el g P el o D η g en η konv η s y s [omdr/mi n] [V ] [A] [V ] [A] [W ] [W ] [W ] [ ] [%] [%] [%] ,4 2,5 2,2 0,7 98 3,5 1,4 0, ,1 4,1 3,6 1, ,6 3,8 0, ,9 6,2 5,2 1, ,1 8,3 0, ,0 11,0 9,4 2, ,0 26,3 0, ,6 12,6 10,6 3, ,0 34,0 0, ,1 13,6 11,4 3, ,0 38,8 0, ,5 15,5 12,2 3, ,5 45,1 0, ,8 15,1 12,7 3, ,6 48,3 0, ,0 15,6 13,1 3, ,9 51,1 0, ,2 16,3 13,5 4, ,4 54,7 0, ,2 17,0 13,7 4, ,6 56,2 0, ,8 15,0 12,6 3, ,9 47,9 0, ,3 10,2 17,2 5, ,7 89,2 0, ,3 5,0 14,6 5, ,3 73,0 0, ,3 1,3 7,7 2, ,0 20,8 0, ,1 0,7 5,8 1, ,7 11,0 0, ,6 4,5 14,0 4, ,5 61,6 0, ,9 14,5 14,1 4, ,6 63,2 0, Figur A.21: Generatorens, konverterens og systemets virkningsgrad ved forskellige omdrejningstal. 106
107 A.6. FORSØG 5 - BESTEMMELSE AF MODIFICERET GENERATORS VIRK- NINGSGRAD Figur A.22: Generatorens, konverterens og systemets virkningsgrad ved forskellige dutycycles omkring 4700 omdr/mi n. A.6.5 Vurdering af resultater Det ses på figur A.21 og i tabel A.7, at virkningsgraden for det samlede system ikke overstiger 15 %. Dette grunder primært i at virkningsgraden for generatoren ligger imellem 3 % og 23 %. Den lave virkningsgrad skyldes formentligt at de isatte permanente magneter ikke er kraftige nok. Det betyder at den genererede effekt bliver mindre end det var tiltænkt. Når den genererede effekt er lille kommer det mekanisk tab i lejer i generatoren til at have større betydning for virkningsgraden. Konverterens virkningsgrad ligger imellem 41 % og 80 %. Det ses at konverterens virkningsgrad afhænger af duty cyclen og hvor stor en effekt der overføres. Jo længere dutycyclen kommer væk fra udgangspunktet, (0,5), jo ringere bliver virkningsgraden. Dette stemmer godt overens med teorien omkring buck-boost konvertere. Når konverteren skal overføre lille effekt, kommer ladespændingsfaldet over dioden og transistorerne til at have stor betydning for konverterens virkningsgrad. Da det ikke var muligt at konvertere udgangsspændingen op til 14 V ved alle omdrejningstal, vurderes det, at der kan opnås bedre systemvirkningsgrader med en generator med større udgangseffekt. 107
108
109 Appendiks B Appendiks - Udstyrsliste Herunder ses en liste med udstyr brugt til de forskellige forsøg. NAVN AAU NR BESKRIVELSE FORSØG 700 W klopolsgenerator - klopolsgenerator til test 1,2,3 700 W PM klopolsgenerator - Egen klopolsgenerator til test 4,5 2,5 kw Thrige-titan motor - motor til at drive klopolsgenerator med 1,2,3,4,5 Scan Brit WP batteri til at lade på under tests 1 Power supply SM Til felt på DC-motor 1,2 Power supply SM Til rotorvikling på DC-motor 3,4,5 Power supply SM Til rotorvikling på DC-motor 1,2 Power supply GPC Til Torquemaster DC/DC konverter 1,2,3,4,5 Power supply GPC Strømforsyning til magnetisering af roter 1,2,3 Power supply GPC Strømforsyning til felt på DC-motor 3,4,5 Torquemaster LT200-s - Måling af strøm 1,2,3 NI USB Indsamling af data fra Torquemaster 1,2,3,4,5 NI USB Indsamling af data fra LEM-modul 1,2,3 Effektmodstand - 2 effektmodstande til afladning af batteri 1,2,3,4,5 Unigor 1N multimeter Måling af strøm 2,4,5 Unigor 1N multimeter Måling af strøm 5 Fluke 179 multimeter Spændingsmåling 2,3,4,5 HP 973A multimeter Spændingsmåling 4,5 Tektronic TDS 420 oscilloskop Spændingsmåling 3 109
110
111 Appendiks C Designprocedure for regulator I afsnittet beskrives de design procedurer for lead- og PI-regulatorer, som benyttes i kapitel 6. Til afsnittet er benyttet følgende kilde [Phillips, Harbor, 2000] og [Nybo, 2004]. C.0.6 Lead regulator En lead regulatoren giver et positivt fasebidrag. Derudover bidrager lead-regulatoren med forstærkning i det højfrekvente område, hvilket giver bedre transient respons. Det er derfor muligt, at øge systemets lukketsløjfe båndbredde, man den højfrekvente forstærkning kan give problemer med støj ved step-respons. Denne form for regulator kan relateres til en PD-regulator. På figur C.1 ses lead-regulatorens karakteristik. Det fremgår af figuren, at lead-regulatoren fungerer som et high-pass-filter og giver et positivt fasedrej i et begrænset frekvensområde. Det er derfor vigtigt at være omhyggelig ved placeringen af en lead-regulator. Figur C.1: Bode-karakteristik for lead-regulator. 111
112 APPENDIKS C. DESIGNPROCEDURE FOR REGULATOR Designprocedure for Lead-regulator Lead-regulatoren er givet ved følgende overføringsfunktion: G c (s) = a 1 s + a 0 b 1 s + 1 (C.1) For at bestemme konstanterne; a 1, b 1 og a 0 gennemgås følgende design procedure: Bestem krav til ϕ m, regulator DC-forstærkning a 0 og indsvingningstid (T s ). Vælg ω 1 som opfylder kravene: 1. G p (j ω 1 )H(j ω 1 ) < 180 o + ϕ m (C.2) 2. Gp (j ω 1 )H(j ω 1 ) < 1 a 0 (C.3) 3. 8 ω 1 > T s t an(ϕ m ) (C.4) 4. Find kompensatorvinkel θ ved ω 1 : θ = G c (j ω 1 ) = 180 o + ϕ m G p (j ω 1 )H(j ω 1 ) (C.5) 5. Find tidskonstanter a 1 og b 1 : a 1 = 1 a 0 Gp (j ω 1 )H(j ω 1 ) cos(θ) cos(θ) a 0 Gp (j ω 1 )H(j ω 1 ) b 1 = cos(θ) a 0 Gp (j ω 1 )H(j ω 1 ) ω 1 si n(θ) (C.6) C.0.7 PI-regulator En PI-regulator består af et proportionalled og et integratorled. Denne form for regulator kan relateres til en lagregulator. Både PI- og lagregulatoren udmærker sig i det lavfrekvente område. PI-regulatoren giver et negativt fasedrej men bidrager med positiv forstærkning i det lavfrekvente område, samt fjerner stationære fejl i lukketsløjfe overføringsfunktionen. Derudover har PI-regulatoren negativ indflydelse på det transiente respons. På figur C.2 ses PI-regulatorens karakteristik. PI-regulatoren kan ses som et low-pass-filter, hvor de lave frekvenser forstærkes. 112
113 Figur C.2: Bode-karakteristik for PI-regulator. Designprocedure for PI-regulator PI-regulatoren er givet ved følgende overføringsfunktion: Hvor: G pi (s) = K p + K i s = K p s + K i s (C.7) K p Proportionalforstærkning = konstant K i Integralforstærkning = 1 s For at bestemme konstanterne; K p og K i gennemgås følgende design procedure: Juster DC-gainet. 1. Bestem ω 2, hvor θ = G c (j ω 2 ) = 180 o + ϕ m G p (j ω 2 )H(j ω 2 ) (C.8) 2. Differentialforstærkningen: K p = cosθ Kc G p (j ω 2 )H(j ω 2 ) (C.9) Hvor: Stewaw H(j ω 2 ) Sensor gain θ Kompensationsvinklen ved ω 2 3. Integralforstærkningen: K i = 0,1ω 2 K p (C.10) 113
114
115 Appendiks D Spole Til design af spolen til kredsløbet følges step-by-step metoden i [Erickson, Maksimovic, 2004]. Desuden bruges databladet for C-kerner fra Metglas [Metglas, 2009]. Som det er beregnet i afsnit 5.2, formel 5.35, skal spolen have en induktans på L = 376µH, og kunne holde til I max = 61,5A. Disse værdier designes spoler ud fra. Til spolekerne vælges en Powerlite C-kerne fra Metglas, som har en mætningsflux densitet på B sat =1,56 T. På den baggrund sættes B max =1,56 T i spoledesignet. Derudover vælges, at kobbertab (P u ) maksimalt er 1 %. Værdien for K u, som er fyldningsfaktor i spole vinduet, sættes til 0,5, da det ifølge [Erickson, Maksimovic, 2004] er en passende værdi. Kerne: Først bestemmes størrelsen på kernen i spolen vha. kerne-geometri-konstanten K g. Værdien for K g benyttes i [Erickson, Maksimovic, 2004], som en geometrisk konstant for kernen i en spole, og beregnes derfor kun udfra kernegeometrien: K g = A2 c W A (MLT ) (D.1) Hvor: A c Tværsnitsareal af kernen [cm 2 ] W A Kernevindue areal [cm 2 ] MLT Gennemsnitlig omløbslængde for viklinger [cm] For at opnå den korrekte K g -værdi, skal følgende ligning opfyldes: K g ρ L2 I 2 max B 2 max R K u 10 8 (D.2) Hvor: ρ Resistivitet for viklinger [Ω cm] R Viklingsmodstand [Ω] L Induktans [H] Kobbertabet (P cu ) beregnes udfra den maksimale leverede effekt. Det tilladte kobbertab begrænses til: P cu = 800W 1% = 8W 115 (D.3)
116 APPENDIKS D. SPOLE Viklingsmodstanden (R) beregnes vha. det tilladte kobbertab: R = P cu Imax 2 = 8W = 2,12mΩ (D.4) 61,5A2 Resistiviteten for kobber ved 100 o C er 2, Ω cm. De udregnede værdierne indsættes i ligning D.2, og K g udregnes: K g 2, Ω cm ( H) 2 (61,5A) 2 (1,56T ) 2 2, Ω 0, = 47,79cm 5 (D.5) Spolen skal have et stort vidnuesareal, da viklingerne i spolen skal kunne holde til en stor strøm (61,5 A). Viklingerne består derfor af forholdsvis tyk kobbertråd. Til det videre design tages derfor udgangspunkt i den C-kerne fra Metglas, med det største vindueareal, som er model AMCC 367S. Denne kerne skal opfylder kravet til den udregnede K g -værdi. Til det benyttes ligning D.1. Værdierne for A c og W A kan aflæses i databladet for kernen, mens MLT skal beregnes. Kernens mål kan ses på figur D.1 Figur D.1: C-kerne, model AMCC 367S. For at få en gennemsnitlig omløbslængde (MLT) findes gennemsnittet af den korteste og den længste vej, se figur D.2. Den korteste vej, helt inde ved kernen er: 2 25mm ,3mm = 10,06cm (D.6) Den længeste vej beregnes således, at kobbertråden vil løbe ude i midten af kernevinduet, derved kan kernen omvikles på begge sider. Det vil sige, at vinduesbredden lægges til alle afstande: 2 (25mm + 67mm) + 2 (25,3mm + 67mm) = 36,86cm (D.7) 116
117 Derved bliver den gennemsnitlige omløbslængde: 36,86cm + 10,06cm MLT = = 23, 46cm (D.8) 2 Figur D.2: Omløbslængder. Den grønne er den korteste, den blå er den længste og den røde er den gennemsnitlige (MLT). Det tjekkes nu, om spolekernen opfylder kravene til K g, ved at indsætte i formel D.1: K g = (5,29cm2 ) 2 63,81cm 2 23, 46cm = 76cm 5 (D.9) Det ses heraf, at spolekernen AMCC 367S opfylder kravet til K g. De resterende beregninger til design af spolen baseres på denne kerne. Længden af luftgabet: Til beregning af længden af luftgabet tages udgangspunkt i, at energien i spolen er den samme, som energien i kernen. Derfor laves følgende udledning: E g,max = E L,max 1 2 B max H g V g = 1 2 L I 2 max B max Bmax µ 0 l g A c = L I 2 max B 2 max µ 0 l g A c = L I 2 max Desuden ganges med 10 4, for at få resultatet i cm: l g = L I 2 max µ 0 B 2 max A c l g = µ 0 L I 2 max B 2 max A c 10 4 (D.10) 117
118 APPENDIKS D. SPOLE Hvor: E g Energi i kerne [W] E L Energi i spole [W] H g Magnetisk feltstyrke [ A m ] V g Volumen af luftgab [cm 3 ] µ 0 Vakuumpermabilitet [ H m ] l g Længde af luftgab [cm] A c Tværsnitsareal af kernen [cm 2 ] Værdien for µ 0 = 4π 10 7 H m. Værdierne indsættes i ligning D.10: Antal viklinger: l g = 4π 10 7 H m H (61,5A) 2 (1,56T ) 2 5,29cm = 0,14cm (D.11) Til bestemmelse af antallet af viklinger tages udgangspunkt i ligning D.10: l g = 1 L Imax H g B max A c l g H g = L I max B max A c I max 10 4 Da l g H g = MMF, og MMF = N I max, se afsnit 4.1.2, fås: N I max = L I max B max A c I max 10 4 N = L I max B max A c 10 4 (D.12) Hvor: MMF Magnemotorisk kraft [A] N Antal viklinger [ ] Værdierne indsættes i ligning D.12: H 61,5A 1,56T 5,29cm = 28 (D.13) Plads til viklinger: Til bestemmelse af tykkelsen på kobbertråden benyttes formlen: A W K u W A n (D.14) Hvor: A W Areal af hver vikling [cm 2 ] 118
119 Værdierne indsættes: A W 0,5 63,81cm2 28 = 1,14cm 2 (D.15) Det betyder, at den kobbertråd, som vælges til spolen, skal have at tværsnitsareal mindre en 1,14 cm 2 Viklingsmodstanden: For at undersøge om spolen overholder begrænsningen for kobbertab beregnes viklingsmodstanden for den kobbertråd, der benyttes. Her tages udgangspunkte i data fra [Erickson, Maksimovic, 2004], for en kobbertråd med en diameter på 0,927 cm og et tværsnitsareal på 0,67 cm 2. Resistiviteten aflæses til 2, [ Ω cm ] og der fås: R = n MLT ρ = 28 23,46cm 2, Ω cm = 1,68mΩ (D.16) Da modstanden i viklingerne er mindre end det tilladte på 1% opfylder spolen alle krav. En spole designet med en AMCC 367S kerne, en kobbertråd med diameter på 0,927 cm og 28 viklinger opfylder alle krav, og kan derfor bruges i konverteren. 119
120

121 Appendiks E Datablad neodym magnet 121
8. Jævn- og vekselstrømsmotorer
 Grundlæggende elektroteknisk teori Side 43 8. Jævn- og vekselstrømsmotorer 8.1. Jævnstrømsmotorer 8.1.1. Motorprincippet og generatorprincippet I afsnit 5.2 blev motorprincippet gennemgået, men her repeteres
Grundlæggende elektroteknisk teori Side 43 8. Jævn- og vekselstrømsmotorer 8.1. Jævnstrømsmotorer 8.1.1. Motorprincippet og generatorprincippet I afsnit 5.2 blev motorprincippet gennemgået, men her repeteres
Gudenåcentralen. vand elektricitet energi klima. Opgaver for gymnasiet, HF og HTX
 Gudenåcentralen vand elektricitet energi klima Opgaver for gymnasiet, HF og HTX Forord Det følgende er en opgave om Gudenaacentralen, der er Danmarks største vandkraftværk. Værket ligger ved Tange Sø.
Gudenåcentralen vand elektricitet energi klima Opgaver for gymnasiet, HF og HTX Forord Det følgende er en opgave om Gudenaacentralen, der er Danmarks største vandkraftværk. Værket ligger ved Tange Sø.
EC-VENTILATORER: ENERGIBESPARENDE, EFFEKTIVE OG EKSTREMT LYDSVAGE
 EC-VENTILATORER: ENERGIBESPARENDE, EFFEKTIVE OG EKSTREMT LYDSVAGE EC-ventilatorer hjælper dig med at spare energi, penge, tid og plads. Dertil kommer integreret trinløs, støjsvag hastighedskontrol, lang
EC-VENTILATORER: ENERGIBESPARENDE, EFFEKTIVE OG EKSTREMT LYDSVAGE EC-ventilatorer hjælper dig med at spare energi, penge, tid og plads. Dertil kommer integreret trinløs, støjsvag hastighedskontrol, lang
Kapitel 8. Magnetiske felter - natur, måleenheder m.v. 1 Wb = 1 Tesla = 10.000 Gauss m 2 1 µt (mikrotesla) = 10 mg (miligauss)
 = 10 mg (miligauss)") Kapitel 8 Magnetiske felter - natur, måleenheder m.v. Natur Enhver leder hvori der løber en strøm vil omgives af et magnetfelt. Størrelsen af magnetfeltet er afhængig af strømmen, der løber i lederen og
Kapitel 8 Magnetiske felter - natur, måleenheder m.v. Natur Enhver leder hvori der løber en strøm vil omgives af et magnetfelt. Størrelsen af magnetfeltet er afhængig af strømmen, der løber i lederen og
Formålet med dette forsøg er at lave en karakteristik af et 4,5 V batteri og undersøge dets effektforhold.
 Formål Formålet med dette forsøg er at lave en karakteristik af et 4,5 V batteri og undersøge dets effektforhold. Teori Et batteri opfører sig som en model bestående af en ideel spændingskilde og en indre
Formål Formålet med dette forsøg er at lave en karakteristik af et 4,5 V batteri og undersøge dets effektforhold. Teori Et batteri opfører sig som en model bestående af en ideel spændingskilde og en indre
El-lære. Ejendomsservice
 Ejendomsservice El-lære Indledning 1 Jævnspænding 2 Vekselspænding 3 Transformator 6 Husinstallationer 7 Fejlstrømsafbryder 9 Afbryder 10 Stikkontakt 10 Stikpropper med jord 11 Elektrisk effekt og energi
Ejendomsservice El-lære Indledning 1 Jævnspænding 2 Vekselspænding 3 Transformator 6 Husinstallationer 7 Fejlstrømsafbryder 9 Afbryder 10 Stikkontakt 10 Stikpropper med jord 11 Elektrisk effekt og energi
Samfundets elektriske energiforsyning
 Samfundets elektriske energiforsyning Niveau: 9. klasse Varighed: 8 lektioner Præsentation: I forløbet Samfundets elektriske energiforsyning arbejdes der med induktion, transformation og kraftværkers og
Samfundets elektriske energiforsyning Niveau: 9. klasse Varighed: 8 lektioner Præsentation: I forløbet Samfundets elektriske energiforsyning arbejdes der med induktion, transformation og kraftværkers og
Når felter forandres Ny Prisma Fysik og kemi 9 - kapitel 5 Skole: Navn: Klasse:
 Når felter forandres Ny Prisma Fysik og kemi 9 - kapitel 5 Skole: Navn: Klasse: Opgave 1 Hvilke af stofferne kan en magnet tiltrække? Der er 9 svarmuligheder. Sæt 4 kryds. Jern Alle metaller Bly Stål Guld
Når felter forandres Ny Prisma Fysik og kemi 9 - kapitel 5 Skole: Navn: Klasse: Opgave 1 Hvilke af stofferne kan en magnet tiltrække? Der er 9 svarmuligheder. Sæt 4 kryds. Jern Alle metaller Bly Stål Guld
Opgavesæt om Gudenaacentralen
 Opgavesæt om Gudenaacentralen ELMUSEET 2000 Indholdsfortegnelse: Side Gudenaacentralen... 1 1. Vandet i tilløbskanalen... 1 2. Hvor kommer vandet fra... 2 3. Turbinerne... 3 4. Vandets potentielle energi...
Opgavesæt om Gudenaacentralen ELMUSEET 2000 Indholdsfortegnelse: Side Gudenaacentralen... 1 1. Vandet i tilløbskanalen... 1 2. Hvor kommer vandet fra... 2 3. Turbinerne... 3 4. Vandets potentielle energi...
EC-VENTILATORER: ENERGIBESPARENDE, EFFEKTIVE OG EKSTREMT LYDSVAGE
 EC-VENTILATORER: ENERGIBESPARENDE, EFFEKTIVE OG EKSTREMT LYDSVAGE EC-TEKNOLOGI D EC-ventilatorer hjælper dig med at spare energi, penge, tid og plads. Dertil kommer integreret trinløs, støjsvag hastighedskontrol,
EC-VENTILATORER: ENERGIBESPARENDE, EFFEKTIVE OG EKSTREMT LYDSVAGE EC-TEKNOLOGI D EC-ventilatorer hjælper dig med at spare energi, penge, tid og plads. Dertil kommer integreret trinløs, støjsvag hastighedskontrol,
SPOLER (DC) Princippet (magnetiske felter) Induktion og selvinduktion Induktans (selvinduktionskoefficient)
 Princippet (magnetiske felter) Induktion og selvinduktion Induktans (selvinduktionskoefficient)") SPOLER (DC) Princippet (magnetiske felter) Induktion og selvinduktion Induktans (selvinduktionskoefficient) Princippet Hvis vi betragter kredsskemaet her til højre, og fokuserer på delen med sort stregfarve,
SPOLER (DC) Princippet (magnetiske felter) Induktion og selvinduktion Induktans (selvinduktionskoefficient) Princippet Hvis vi betragter kredsskemaet her til højre, og fokuserer på delen med sort stregfarve,
Motor styring. frekvensstyring Tema: Bachelor projekt Projektperiode: 7 semester Projektgruppe: Synopsis: Deltagere: Jonas Nielsen
 Ingeniørhøjskolen i København Bæredygtig Energiteknik og Stærkstrøm Titel: Energi forbrug ved frekvensstyring Tema: Bachelor projekt Projektperiode: 7 semester Projektgruppe: Synopsis: Deltagere: Da virksomheder
Ingeniørhøjskolen i København Bæredygtig Energiteknik og Stærkstrøm Titel: Energi forbrug ved frekvensstyring Tema: Bachelor projekt Projektperiode: 7 semester Projektgruppe: Synopsis: Deltagere: Da virksomheder
FREMSTILLING AF VEKSELSPÆNDING. Induktion Generatorprincippet
 AC FREMSTILLING AF VEKSELSPÆNDING Induktion Generatorprincippet Induktion: Som vi tidligere har gennemgået, så induceres der en elektromotorisk kraft i en ledersløjfe, hvis denne udsættes for et varierende
AC FREMSTILLING AF VEKSELSPÆNDING Induktion Generatorprincippet Induktion: Som vi tidligere har gennemgået, så induceres der en elektromotorisk kraft i en ledersløjfe, hvis denne udsættes for et varierende
Preben Holm - Copyright 2002
 9 > : > > Preben Holm - Copyright 2002! " $# %& Katode: minuspol Anode: pluspol ')(*+(,.-0/1*32546-728,,/1* Pilen over tegnet for spændingskilden på nedenstående tegning angiver at spændingen kan varieres.
9 > : > > Preben Holm - Copyright 2002! " $# %& Katode: minuspol Anode: pluspol ')(*+(,.-0/1*32546-728,,/1* Pilen over tegnet for spændingskilden på nedenstående tegning angiver at spændingen kan varieres.
Torben Laubst. Grundlæggende. Polyteknisk Forlag
 Torben Laubst Grundlæggende Polyteknisk Forlag Torben Laubst Grundlæggende Polyteknisk Forlag DIA- EP 1990 3. udgave INDHOLDSFORTEGNELSE 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Indledning Transformeres principielle
Torben Laubst Grundlæggende Polyteknisk Forlag Torben Laubst Grundlæggende Polyteknisk Forlag DIA- EP 1990 3. udgave INDHOLDSFORTEGNELSE 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Indledning Transformeres principielle
Ordliste. Teknisk håndbog om magnetfelter og elektriske felter
 Ordliste Teknisk håndbog om magnetfelter og elektriske felter Afladning Atom B-felt Dielektrika Dipol Dosimeter E-felt Eksponering Elektricitetsmængde Elektrisk elementarladning Elektrisk felt Elektrisk
Ordliste Teknisk håndbog om magnetfelter og elektriske felter Afladning Atom B-felt Dielektrika Dipol Dosimeter E-felt Eksponering Elektricitetsmængde Elektrisk elementarladning Elektrisk felt Elektrisk
Antennens udstrålingsmodstand hvad er det for en størrelse?
 Antennens udstrålingsmodstand hvad er det for en størrelse? Det faktum, at lyset har en endelig hastighed er en forudsætning for at en antenne udstråler, og at den har en ohmsk udstrålingsmodstand. Den
Antennens udstrålingsmodstand hvad er det for en størrelse? Det faktum, at lyset har en endelig hastighed er en forudsætning for at en antenne udstråler, og at den har en ohmsk udstrålingsmodstand. Den
EMSD 7 Gr. 15 Aalborg Universitet
 Elektro Mekanisk System Design EMSD 7 Gr. 15 Aalborg Universitet Institut for EnergiTeknik Pontoppidanstræde 101, 9220 Aalborg Øst Det Teknisk-Naturvidenskabelige Fakultet Aalborg Universitet M-sektoren
Elektro Mekanisk System Design EMSD 7 Gr. 15 Aalborg Universitet Institut for EnergiTeknik Pontoppidanstræde 101, 9220 Aalborg Øst Det Teknisk-Naturvidenskabelige Fakultet Aalborg Universitet M-sektoren
Induktion Michael faraday var en engelsk fysiker der opfandt induktionstrømmen i Nu havde man mulighed for at få elektrisk lys og strøm ud til
 Jordens magnetfelt Jorderens magnetfelt beskytter jorden fra kosmiske strålinger fra solen. Magnetfeltet kommer ved at i jorderens kerne/ indre er der flydende jern og nikkel, dette jern og nikkel rotere
Jordens magnetfelt Jorderens magnetfelt beskytter jorden fra kosmiske strålinger fra solen. Magnetfeltet kommer ved at i jorderens kerne/ indre er der flydende jern og nikkel, dette jern og nikkel rotere
13 cm. Tværsnit af kernens ben: 30 mm 30 mm
 Opgaver: Opgave 6.1 På figuren er vist en transformator, der skal anvendes i en strømforsyning. Den relative permeabilitet for kernen er 2500, og kernen kan regnes for at være lineær. 13 cm µ r = 2500
Opgaver: Opgave 6.1 På figuren er vist en transformator, der skal anvendes i en strømforsyning. Den relative permeabilitet for kernen er 2500, og kernen kan regnes for at være lineær. 13 cm µ r = 2500
Ohms Lov Ohms lov beskriver sammenhæng mellem spænding, strømstyrke og modstand.
 Ellære Ohms Lov Ohms lov beskriver sammenhæng mellem spænding, strømstyrke og modstand. Spænding [V] Strømstyrke [A] Modstand [W] kan bruge følgende måde til at huske hvordan i regner de forskellige værdier.
Ellære Ohms Lov Ohms lov beskriver sammenhæng mellem spænding, strømstyrke og modstand. Spænding [V] Strømstyrke [A] Modstand [W] kan bruge følgende måde til at huske hvordan i regner de forskellige værdier.
Teknologi & kommunikation
 Grundlæggende Side af NV Elektrotekniske grundbegreber Version.0 Spænding, strøm og modstand Elektricitet: dannet af det græske ord elektron, hvilket betyder rav, idet man tidligere iagttog gnidningselektricitet
Grundlæggende Side af NV Elektrotekniske grundbegreber Version.0 Spænding, strøm og modstand Elektricitet: dannet af det græske ord elektron, hvilket betyder rav, idet man tidligere iagttog gnidningselektricitet
Gymnasieøvelse i Skanning Tunnel Mikroskopi (STM)
") Gymnasieøvelse i Skanning Tunnel Mikroskopi (STM) Institut for Fysik og Astronomi Aarhus Universitet, Sep 2006. Lars Petersen og Erik Lægsgaard Indledning Denne note skal tjene som en kort introduktion
Gymnasieøvelse i Skanning Tunnel Mikroskopi (STM) Institut for Fysik og Astronomi Aarhus Universitet, Sep 2006. Lars Petersen og Erik Lægsgaard Indledning Denne note skal tjene som en kort introduktion
Protoner med magnetfelter i alle mulige retninger.
 Magnetisk resonansspektroskopi Protoners magnetfelt I 1820 lavede HC Ørsted et eksperiment, der senere skulle gå over i historiebøgerne. Han placerede en magnet i nærheden af en ledning og så, at når der
Magnetisk resonansspektroskopi Protoners magnetfelt I 1820 lavede HC Ørsted et eksperiment, der senere skulle gå over i historiebøgerne. Han placerede en magnet i nærheden af en ledning og så, at når der
Når strømstyrken ikke er for stor, kan batteriet holde spændingsforskellen konstant på 12 V.
 For at svare på nogle af spørgsmålene i dette opgavesæt kan det sagtens være, at du bliver nødt til at hente informationer på internettet. Til den ende kan oplyses, at der er anbragt relevante link på
For at svare på nogle af spørgsmålene i dette opgavesæt kan det sagtens være, at du bliver nødt til at hente informationer på internettet. Til den ende kan oplyses, at der er anbragt relevante link på
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Skriftlig prøve i Fysik 4 (Elektromagnetisme) 27. juni 2008
 27. juni 2008") KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Skriftlig prøve i Fysik 4 (Elektromagnetisme) 27. juni 2008 Tilladte hjælpemidler: Medbragt litteratur, noter og lommeregner. Der må besvares
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Skriftlig prøve i Fysik 4 (Elektromagnetisme) 27. juni 2008 Tilladte hjælpemidler: Medbragt litteratur, noter og lommeregner. Der må besvares
Opgaver for gymnasiet, HF og HTX
 GUDENAACENTRALEN vand - elektricitet - energi Opgaver for gymnasiet, HF og HTX ELMUSEET Forord Det følgende er en opgave om Gudenaacentralen, der er Danmarks største vandkraftværk. Værket ligger ved Tange
GUDENAACENTRALEN vand - elektricitet - energi Opgaver for gymnasiet, HF og HTX ELMUSEET Forord Det følgende er en opgave om Gudenaacentralen, der er Danmarks største vandkraftværk. Værket ligger ved Tange
Katalog: Magnetfelt ved højspændingskabler og -luftledninger
 Katalog: Magnetfelt ved højspændingskabler og -luftledninger 3. udgave. April 213 I denne udgave er fx tilføjet kabelsystemer, som er anvendt i nyere forbindelser samt en mere detaljeret beskrivelse af
Katalog: Magnetfelt ved højspændingskabler og -luftledninger 3. udgave. April 213 I denne udgave er fx tilføjet kabelsystemer, som er anvendt i nyere forbindelser samt en mere detaljeret beskrivelse af
Elektronikken bag medicinsk måleudstyr
 Elektronikken bag medicinsk måleudstyr Måling af svage elektriske signaler Indholdsfortegnelse Indholdsfortegnelse... 1 Introduktion... 1 Grundlæggende kredsløbteknik... 2 Ohms lov... 2 Strøm- og spændingsdeling...
Elektronikken bag medicinsk måleudstyr Måling af svage elektriske signaler Indholdsfortegnelse Indholdsfortegnelse... 1 Introduktion... 1 Grundlæggende kredsløbteknik... 2 Ohms lov... 2 Strøm- og spændingsdeling...
Strømforsyning +/- 12V serieregulator og 5V Switch mode
 Udarbejdet af: +/- 12V serieregulator og 5V Switch mode Side 1 af 15 Udarbejdet af: Komponentliste. B1: 4 stk. LN4007 1A/1000V diode D1: RGP30D diode Fast Recovery 150nS - 500nS, 3A 200V C1 C3 og C4: 100nF
Udarbejdet af: +/- 12V serieregulator og 5V Switch mode Side 1 af 15 Udarbejdet af: Komponentliste. B1: 4 stk. LN4007 1A/1000V diode D1: RGP30D diode Fast Recovery 150nS - 500nS, 3A 200V C1 C3 og C4: 100nF
Syrer, baser og salte:
 Syrer, baser og salte: Salte: Salte er en stor gruppe af kemiske stoffer med en række fælles egenskaber I tør, fast form er de krystaller. Opløst i vand danner de frie ioner som giver vandet elektrisk
Syrer, baser og salte: Salte: Salte er en stor gruppe af kemiske stoffer med en række fælles egenskaber I tør, fast form er de krystaller. Opløst i vand danner de frie ioner som giver vandet elektrisk
Strøm til hjernen Elektromagnetisme
 Strøm til hjernen Forkortelser F = Forsøg (som vi udfører) FB = Forsøg med børn (forsøg som vi udfører, men som børnene deltager aktivt i) H = Hands-on forsøg (børnene får selv lov til at prøve det hele)
Strøm til hjernen Forkortelser F = Forsøg (som vi udfører) FB = Forsøg med børn (forsøg som vi udfører, men som børnene deltager aktivt i) H = Hands-on forsøg (børnene får selv lov til at prøve det hele)
EDR Frederikssund afdeling Almen elektronik kursus. Afsnit 9-9B-10. EDR Frederikssund Afdelings Almen elektronik kursus. Joakim Soya OZ1DUG Formand
 Afsnit 9-9B-10 EDR Frederikssund Afdelings Joakim Soya OZ1DUG Formand 1 Opgaver fra sidste gang Pico, nano, micro, milli,, kilo, mega Farvekode for modstande og kondensatorer. 10 k 10 k m A Modstanden
Afsnit 9-9B-10 EDR Frederikssund Afdelings Joakim Soya OZ1DUG Formand 1 Opgaver fra sidste gang Pico, nano, micro, milli,, kilo, mega Farvekode for modstande og kondensatorer. 10 k 10 k m A Modstanden
Tallene angivet i rapporten som kronologiske punkter refererer til de i opgaven stillede spørgsmål.
 Labøvelse 2, fysik 2 Uge 47, Kalle, Max og Henriette Tallene angivet i rapporten som kronologiske punkter refererer til de i opgaven stillede spørgsmål. 1. Vi har to forskellige størrelser: a: en skive
Labøvelse 2, fysik 2 Uge 47, Kalle, Max og Henriette Tallene angivet i rapporten som kronologiske punkter refererer til de i opgaven stillede spørgsmål. 1. Vi har to forskellige størrelser: a: en skive
Højere Teknisk Eksamen maj 2008. Matematik A. Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING. Undervisningsministeriet
 Højere Teknisk Eksamen maj 2008 HTX081-MAA Matematik A Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING Undervisningsministeriet Fra onsdag den 28. maj til torsdag den 29. maj 2008 Forord
Højere Teknisk Eksamen maj 2008 HTX081-MAA Matematik A Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING Undervisningsministeriet Fra onsdag den 28. maj til torsdag den 29. maj 2008 Forord
AIMT Hærderiet Induktionshærdning The Group of Aalberts Industries Material Technologies
 Induktionshærdning The Group of Aalberts Industries Material Technologies Hvorfor vælge Induktionshærdning Lokal hærdning på detaljen Relativ små formforandringer God reproducerbarhed Økonomisk attraktiv
Induktionshærdning The Group of Aalberts Industries Material Technologies Hvorfor vælge Induktionshærdning Lokal hærdning på detaljen Relativ små formforandringer God reproducerbarhed Økonomisk attraktiv
Spar penge på køling - uden kølemidler
 Spar penge på køling - uden kølemidler En artikel om et beregningseksempel, hvor et sorptivt køleanlæg, DesiCool fra Munters A/S, sammenlignes med et traditionelt kompressorkølet ventilationssystem. Af
Spar penge på køling - uden kølemidler En artikel om et beregningseksempel, hvor et sorptivt køleanlæg, DesiCool fra Munters A/S, sammenlignes med et traditionelt kompressorkølet ventilationssystem. Af
6 Plasmadiagnostik 6.1 Tætheds- og temperaturmålinger ved Thomsonspredning
 49 6 Plasmadiagnostik Plasmadiagnostik er en fællesbetegnelse for de forskellige typer måleudstyr, der benyttes til måling af plasmaers parametre og egenskaber. I fusionseksperimenter er der behov for
49 6 Plasmadiagnostik Plasmadiagnostik er en fællesbetegnelse for de forskellige typer måleudstyr, der benyttes til måling af plasmaers parametre og egenskaber. I fusionseksperimenter er der behov for
Massefylden af tør luft ved normalt atmosfærisk tryk ved havets overade ved 15 C bruges som standard i vindkraftindustrien og er lig med 1, 225 kg
 0.1 Vindens energi 0.1. VINDENS ENERGI I dette afsnit... En vindmølle omdanner vindens kinetiske energi til rotationsenergi ved at nedbremse vinden, således at hastigheden er mindre efter at rotorskiven
0.1 Vindens energi 0.1. VINDENS ENERGI I dette afsnit... En vindmølle omdanner vindens kinetiske energi til rotationsenergi ved at nedbremse vinden, således at hastigheden er mindre efter at rotorskiven
i x-aksens retning, så fås ). Forskriften for g fås altså ved i forskriften for f at udskifte alle forekomster af x med x x 0
. Forskriften for g fås altså ved i forskriften for f at udskifte alle forekomster af x med x x 0") BAndengradspolynomier Et polynomium er en funktion på formen f ( ) = an + an + a+ a, hvor ai R kaldes polynomiets koefficienter. Graden af et polynomium er lig med den højeste potens af, for hvilket den
BAndengradspolynomier Et polynomium er en funktion på formen f ( ) = an + an + a+ a, hvor ai R kaldes polynomiets koefficienter. Graden af et polynomium er lig med den højeste potens af, for hvilket den
AARHUS UNIVERSITET. Det Naturvidenskabelige Fakultet Augusteksamen OPGAVESTILLER: Allan H. Sørensen
 AARHUS UNIVERSITET Det Naturvidenskabelige Fakultet Augusteksamen 2006 FAG: Elektromagnetisme OPGAVESTILLER: Allan H. Sørensen Antal sider i opgavesættet (inkl. forsiden): 6 Eksamensdag: fredag dato: 11.
AARHUS UNIVERSITET Det Naturvidenskabelige Fakultet Augusteksamen 2006 FAG: Elektromagnetisme OPGAVESTILLER: Allan H. Sørensen Antal sider i opgavesættet (inkl. forsiden): 6 Eksamensdag: fredag dato: 11.
Målinger på Bølgevippen, WGPC-III
 Målinger på Bølgevippen, WGPC-III Indledende undersøgelser v/ Povl-Otto Nissen Vippegeneratoren er her opstillet med vægtstangsforholdet 30: 94, idet midten af magnetsættet på den lange arm er 94 cm fra
Målinger på Bølgevippen, WGPC-III Indledende undersøgelser v/ Povl-Otto Nissen Vippegeneratoren er her opstillet med vægtstangsforholdet 30: 94, idet midten af magnetsættet på den lange arm er 94 cm fra
Elektromagnetisme 10 Side 1 af 12 Magnetisme. Magnetisering
 Elektroagnetise 10 Side 1 af 12 Magnetisering Magnetfelter skabes af ladninger i bevægelse, altså af elektriske strøe. I den forbindelse skelnes elle to typer af agnetfeltskabende strøe: Frie strøe, der
Elektroagnetise 10 Side 1 af 12 Magnetisering Magnetfelter skabes af ladninger i bevægelse, altså af elektriske strøe. I den forbindelse skelnes elle to typer af agnetfeltskabende strøe: Frie strøe, der
til undervisning eller kommercielt brug er Kopiering samt anvendelse af prøvetryk El-Fagets Uddannelsesnævn
 Flerfaset belastning 3-faset vekselstrøm Mindre belastninger tilsluttes normalt 230 V, hvorimod større belastninger, for at begrænse strømmen mest muligt, tilsluttes 2 eller 3 faser med eller uden nul.
Flerfaset belastning 3-faset vekselstrøm Mindre belastninger tilsluttes normalt 230 V, hvorimod større belastninger, for at begrænse strømmen mest muligt, tilsluttes 2 eller 3 faser med eller uden nul.
Lenze Global Drive Frekvens konvertere og AC motorer Grundlæggende teori
 Frekvens konvertere og AC motorer Grundlæggende teori 1 Hvad skal Frekvens konverter bruges til Hastigheds regulering af en asynkron AC motor => Energibesparelser Mindre slidtage og vedligehold Bedre arbejdsmiljø
Frekvens konvertere og AC motorer Grundlæggende teori 1 Hvad skal Frekvens konverter bruges til Hastigheds regulering af en asynkron AC motor => Energibesparelser Mindre slidtage og vedligehold Bedre arbejdsmiljø
Eksperimentelle øvelser, øvelse nummer 3 : Røntgenstråling målt med Ge-detektor
 Modtaget dato: (forbeholdt instruktor) Godkendt: Dato: Underskrift: Eksperimentelle øvelser, øvelse nummer 3 : Røntgenstråling målt med Ge-detektor Kristian Jerslev, Kristian Mads Egeris Nielsen, Mathias
Modtaget dato: (forbeholdt instruktor) Godkendt: Dato: Underskrift: Eksperimentelle øvelser, øvelse nummer 3 : Røntgenstråling målt med Ge-detektor Kristian Jerslev, Kristian Mads Egeris Nielsen, Mathias
Bjælkeoptimering. Opgave #1. Afleveret: 2005.10.03 Version: 2 Revideret: 2005.11.07. 11968 Optimering, ressourcer og miljø. Anders Løvschal, s022365
 Bjælkeoptimering Opgave # Titel: Bjælkeoptimering Afleveret: 005.0.0 Version: Revideret: 005..07 DTU-kursus: Underviser: Studerende: 968 Optimering, ressourcer og miljø Niels-Jørgen Aagaard Teddy Olsen,
Bjælkeoptimering Opgave # Titel: Bjælkeoptimering Afleveret: 005.0.0 Version: Revideret: 005..07 DTU-kursus: Underviser: Studerende: 968 Optimering, ressourcer og miljø Niels-Jørgen Aagaard Teddy Olsen,
De følgende sider er et forsøg på en forklaring til det meste af det stof I skal have været igennem og som opgives til eksamen.
 De følgende sider er et forsøg på en forklaring til det meste af det stof I skal have været igennem og som opgives til eksamen. Sammenlign disse forklaringer med relevante sider i jeres bog. SPØRGSMÅL
De følgende sider er et forsøg på en forklaring til det meste af det stof I skal have været igennem og som opgives til eksamen. Sammenlign disse forklaringer med relevante sider i jeres bog. SPØRGSMÅL
Indre modstand og energiindhold i et batteri
 Indre modstand og energiindhold i et batteri Side 1 af 10 Indre modstand og energiindhold i et batteri... 1 Formål... 3 Teori... 3 Ohms lov... 3 Forsøgsopstilling... 5 Batteriets indre modstand... 5 Afladning
Indre modstand og energiindhold i et batteri Side 1 af 10 Indre modstand og energiindhold i et batteri... 1 Formål... 3 Teori... 3 Ohms lov... 3 Forsøgsopstilling... 5 Batteriets indre modstand... 5 Afladning
Drejeskive fra Märklin/Fleischmann
 Drejeskive fra Märklin/Fleischmann Märklin og Fleischman har en fælles drejeskive med op til 48 tilslutningsspor. Drejeskiven har et mekanisk låsesystem der bevirker at broen kan stoppe præcis ud for tilslutningssporet.
Drejeskive fra Märklin/Fleischmann Märklin og Fleischman har en fælles drejeskive med op til 48 tilslutningsspor. Drejeskiven har et mekanisk låsesystem der bevirker at broen kan stoppe præcis ud for tilslutningssporet.
Switchmode Powersupply. Lasse Kaae 2009 Juni
 Switchmode Powersupply Lasse Kaae 2009 Juni Agenda Teori (Mandag) Pspice simulering (Mandag) Bygge SPS (Tirsdag) Fejlfinding på produkter (Onsdag-Torsdag) EMC (Torsdag) Gennemgang af PSP-diagrammer (Fredag)
Switchmode Powersupply Lasse Kaae 2009 Juni Agenda Teori (Mandag) Pspice simulering (Mandag) Bygge SPS (Tirsdag) Fejlfinding på produkter (Onsdag-Torsdag) EMC (Torsdag) Gennemgang af PSP-diagrammer (Fredag)
ELLÆRENS KERNE- BEGREBER (DC) Hvad er elektrisk: Ladning Strømstyrke Spændingsforskel Resistans Energi og effekt
 Hvad er elektrisk: Ladning Strømstyrke Spændingsforskel Resistans Energi og effekt") ELLÆRENS KERNE- BEGREBER (DC) Hvad er elektrisk: Ladning Strømstyrke Spændingsforskel Resistans Energi og effekt Atomets partikler: Elektrisk ladning Lad os se på et fysisk stof som kobber: Side 1 Atomets
ELLÆRENS KERNE- BEGREBER (DC) Hvad er elektrisk: Ladning Strømstyrke Spændingsforskel Resistans Energi og effekt Atomets partikler: Elektrisk ladning Lad os se på et fysisk stof som kobber: Side 1 Atomets
LUCAS JÆVNSTRØMS DYNAMOER
 Nedenstående er inspireret af en artikel sakset fra internettet, af en lykkelig selvlært BSA entusiast. LUCAS JÆVNSTRØMS DYNAMOER UDVIKLET AF JOSEPH LUCAS - MANDEN SOM OPFANDT MØRKET En ting som uretmæssigt
Nedenstående er inspireret af en artikel sakset fra internettet, af en lykkelig selvlært BSA entusiast. LUCAS JÆVNSTRØMS DYNAMOER UDVIKLET AF JOSEPH LUCAS - MANDEN SOM OPFANDT MØRKET En ting som uretmæssigt
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE
 KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Fysik 2, Klassisk Mekanik 2 Skriftlig eksamen 23. januar 2009 Tilladte hjælpemidler: Medbragt litteratur, noter og lommeregner Besvarelsen må
KØBENHAVNS UNIVERSITET NATURVIDENSKABELIG BACHELORUDDANNELSE Fysik 2, Klassisk Mekanik 2 Skriftlig eksamen 23. januar 2009 Tilladte hjælpemidler: Medbragt litteratur, noter og lommeregner Besvarelsen må
7 QNL 2PYHQGWSURSRUWLRQDOLWHW +27I\VLN. 1 Intro I hvilket af de to glas er der mest plads til vand?: Hvorfor?:
 1 Intro I hvilket af de to glas er der mest plads til vand?: Hvorfor?: Angiv de variable: Check din forventning ved at hælde lige store mængder vand i to glas med henholdsvis store og små kugler. Hvor
1 Intro I hvilket af de to glas er der mest plads til vand?: Hvorfor?: Angiv de variable: Check din forventning ved at hælde lige store mængder vand i to glas med henholdsvis store og små kugler. Hvor
OSIRIS 10 10 KW VINDMØLLE SEPEEG
 10 KW VINDMØLLE SEPEEG SOL VIND LED DESIGN OG TEKNIK Direkte dreven 10 kw vindmølle, som kombinerer den nyeste teknologi med solid, gennemprøvet mekanik Osiris 10 er en vindretningsorienteret (downwind)
10 KW VINDMØLLE SEPEEG SOL VIND LED DESIGN OG TEKNIK Direkte dreven 10 kw vindmølle, som kombinerer den nyeste teknologi med solid, gennemprøvet mekanik Osiris 10 er en vindretningsorienteret (downwind)
Generel information om Zurc tavleinstrumenter
 Generel information om Zurc tavleinstrumenter Blødtjernsinstrumenter Blødtjernsinstrumentet er beregnet til måling af vekselstrøm og -spænding i frekvensområdet 15-100Hz. Det viser den effektive strømværdi
Generel information om Zurc tavleinstrumenter Blødtjernsinstrumenter Blødtjernsinstrumentet er beregnet til måling af vekselstrøm og -spænding i frekvensområdet 15-100Hz. Det viser den effektive strømværdi
Kulstofnanorør - småt gør stærk Side 20-23 i hæftet
 Kulstofnanorør - småt gør stærk Side 20-23 i hæftet SMÅ FORSØG OG OPGAVER Lineal-lyd 1 Lineal-lyd 2 En lineal holdes med den ene hånd fast ud over en bordkant. Med den anden anslås linealen. Det sker ved
Kulstofnanorør - småt gør stærk Side 20-23 i hæftet SMÅ FORSØG OG OPGAVER Lineal-lyd 1 Lineal-lyd 2 En lineal holdes med den ene hånd fast ud over en bordkant. Med den anden anslås linealen. Det sker ved
APPLICATION SHEET Juli
 Indholdsfortegnelse 1. Beskrivelse 2. Anvendelse - Data 3. Valg af produkt og dimensionering 4. Motovario løsning 1. Beskrivelse Skærmene til cricketbaner er en del af det nødvendige udstyr til cricketspillet.
Indholdsfortegnelse 1. Beskrivelse 2. Anvendelse - Data 3. Valg af produkt og dimensionering 4. Motovario løsning 1. Beskrivelse Skærmene til cricketbaner er en del af det nødvendige udstyr til cricketspillet.
Hjertets elektriske potentialer og målingen af disse
 Hjertets elektriske potentialer og målingen af disse Indholdsfortegnelse Indholdsfortegnelse... 1 Introduktion... 1 Grundlæggende kredsløbteknik... 1 Ohms lov... 2 Strøm- og spændingsdeling... 4 Elektriske
Hjertets elektriske potentialer og målingen af disse Indholdsfortegnelse Indholdsfortegnelse... 1 Introduktion... 1 Grundlæggende kredsløbteknik... 1 Ohms lov... 2 Strøm- og spændingsdeling... 4 Elektriske
TRAY. Installations vejledning. 1 TRAY VARMEVEKSLER. VANDENERGI M.A. Denmark ApS Email: mail@vandenergi.com Phone: +45 61653562
 Installations vejledning. TRY TILLYKKE MED DIN NYE SMUKKE SHOWER TRY Tray er en af de mest økonomiske og interessante måder at spare energi og CO2. Tilbagebetalingstiden er kort. Ved at anvende Tray sparer
Installations vejledning. TRY TILLYKKE MED DIN NYE SMUKKE SHOWER TRY Tray er en af de mest økonomiske og interessante måder at spare energi og CO2. Tilbagebetalingstiden er kort. Ved at anvende Tray sparer
Til at beregne varmelegemets resistans. Kan ohms lov bruges. Hvor R er modstanden/resistansen, U er spændingsfaldet og I er strømstyrken.
 I alle opgaver er der afrundet til det antal betydende cifre, som oplysningen med mindst mulige cifre i opgaven har. Opgave 1 Færdig Spændingsfaldet over varmelegemet er 3.2 V, og varmelegemet omsætter
I alle opgaver er der afrundet til det antal betydende cifre, som oplysningen med mindst mulige cifre i opgaven har. Opgave 1 Færdig Spændingsfaldet over varmelegemet er 3.2 V, og varmelegemet omsætter
MODUL 5 ELLÆRE: INTRONOTE. 1 Basisbegreber
 1 Basisbegreber ellæren er de mest grundlæggende størrelser strøm, spænding og resistans Strøm er ladningsbevægelse, og som det fremgår af bogen, er strømmens retning modsat de bevægende elektroners retning
1 Basisbegreber ellæren er de mest grundlæggende størrelser strøm, spænding og resistans Strøm er ladningsbevægelse, og som det fremgår af bogen, er strømmens retning modsat de bevægende elektroners retning
Solens energi kan tæmmes af nanoteknologi Side 34-37 i hæftet
 SMÅ FORSØG Solens energi kan tæmmes af nanoteknologi Side 34-37 i hæftet Strøm og lys En lysdiode lyser med energien fra et batteri. Det let at få en almindelig rød lysdiode til at lyse med et 4,5 Volts
SMÅ FORSØG Solens energi kan tæmmes af nanoteknologi Side 34-37 i hæftet Strøm og lys En lysdiode lyser med energien fra et batteri. Det let at få en almindelig rød lysdiode til at lyse med et 4,5 Volts
Talrækker. Aktivitet Emne Klassetrin Side
 VisiRegn ideer 3 Talrækker Inge B. Larsen ibl@dpu.dk INFA juli 2001 Indhold: Aktivitet Emne Klassetrin Side Vejledning til Talrækker 2-4 Elevaktiviteter til Talrækker 3.1 Talrækker (1) M-Æ 5-9 3.2 Hanoi-spillet
VisiRegn ideer 3 Talrækker Inge B. Larsen ibl@dpu.dk INFA juli 2001 Indhold: Aktivitet Emne Klassetrin Side Vejledning til Talrækker 2-4 Elevaktiviteter til Talrækker 3.1 Talrækker (1) M-Æ 5-9 3.2 Hanoi-spillet
Den ideelle operationsforstærker.
 ELA Den ideelle operationsforstærker. Symbol e - e + v o Differensforstærker v o A OL (e + - e - ) - A OL e ε e ε e - - e + (se nedenstående figur) e - e ε e + v o AOL e - Z in (i in 0) e + i in i in v
ELA Den ideelle operationsforstærker. Symbol e - e + v o Differensforstærker v o A OL (e + - e - ) - A OL e ε e ε e - - e + (se nedenstående figur) e - e ε e + v o AOL e - Z in (i in 0) e + i in i in v
C Model til konsekvensberegninger
 C Model til konsekvensberegninger C MODEL TIL KONSEKVENSBEREGNINGER FORMÅL C. INPUT C.. Væskeudslip 2 C..2 Gasudslip 3 C..3 Vurdering af omgivelsen 4 C.2 BEREGNINGSMETODEN 6 C.3 VÆSKEUDSLIP 6 C.3. Effektiv
C Model til konsekvensberegninger C MODEL TIL KONSEKVENSBEREGNINGER FORMÅL C. INPUT C.. Væskeudslip 2 C..2 Gasudslip 3 C..3 Vurdering af omgivelsen 4 C.2 BEREGNINGSMETODEN 6 C.3 VÆSKEUDSLIP 6 C.3. Effektiv
Fredericia Maskinmesterskole
 Tilladte hjælpemidler: Formelsamling,lærebøger(med evt. egne notater), regnemaskine og PC som opslagsværk (dvs. opgaven afleveres håndskrevet) Opgave 1: Spoler med jernkerne I en spole med jernkerne er
Tilladte hjælpemidler: Formelsamling,lærebøger(med evt. egne notater), regnemaskine og PC som opslagsværk (dvs. opgaven afleveres håndskrevet) Opgave 1: Spoler med jernkerne I en spole med jernkerne er
Undervisningsmateriale til AMU kursus 48114, Grundlæggende elektronik på mobile maskiner, 1. Udarbejdet i 2015
 Undervisningsmateriale til AMU kursus 48114, Grundlæggende elektronik på mobile maskiner, 1 Udarbejdet i 2015 Emneoversigt/forslag til rækkefølge Opgave 1. Grundlæggende el: 2 lektioner Grundlæggende begreber
Undervisningsmateriale til AMU kursus 48114, Grundlæggende elektronik på mobile maskiner, 1 Udarbejdet i 2015 Emneoversigt/forslag til rækkefølge Opgave 1. Grundlæggende el: 2 lektioner Grundlæggende begreber
Betjeningsvejledning Seba VM-880 Stophanesøger. El.nr. 63 98 964 328
 Betjeningsvejledning Seba VM-880 Stophanesøger El.nr. 63 98 964 328 Seba VM-880 side 2 Indhold Seba VM-880 introduktion... 2 Seba VM-880 standardudstyr... 2 Tekniske specifikationer... 3 Kontrol og indikatorer...
Betjeningsvejledning Seba VM-880 Stophanesøger El.nr. 63 98 964 328 Seba VM-880 side 2 Indhold Seba VM-880 introduktion... 2 Seba VM-880 standardudstyr... 2 Tekniske specifikationer... 3 Kontrol og indikatorer...
1. Permanente magneter
 E4 1. Permanente magneter På sin rejse til Kina i 1270-erne fik Marco Polo forevist en såkaldt "sydviser". Det var en figur, der var let drejelig om en lodret akse. I den udstrakte højre arme var en tynd
E4 1. Permanente magneter På sin rejse til Kina i 1270-erne fik Marco Polo forevist en såkaldt "sydviser". Det var en figur, der var let drejelig om en lodret akse. I den udstrakte højre arme var en tynd
Renere produkter. HFC-frie mælkekøleanlæg
 Renere produkter J.nr. M126-0375 Bilag til hovedrapport HFC-frie mælkekøleanlæg 2 demonstrationsanlæg hos: - Mælkeproducent Poul Sørensen - Danmarks Jordbrugsforskning Forfatter(e) Lasse Søe, eknologisk
Renere produkter J.nr. M126-0375 Bilag til hovedrapport HFC-frie mælkekøleanlæg 2 demonstrationsanlæg hos: - Mælkeproducent Poul Sørensen - Danmarks Jordbrugsforskning Forfatter(e) Lasse Søe, eknologisk
Strålingsintensitet I = Hvor I = intensiteten PS = effekten hvormed strålingen rammer en given flade S AS = arealet af fladen
 Strålingsintensitet Skal det fx afgøres hvor skadelig en given radioaktiv stråling er, er det ikke i sig selv relevant at kende aktiviteten af kilden til strålingen. Kilden kan være langt væk eller indkapslet,
Strålingsintensitet Skal det fx afgøres hvor skadelig en given radioaktiv stråling er, er det ikke i sig selv relevant at kende aktiviteten af kilden til strålingen. Kilden kan være langt væk eller indkapslet,
DC-Motor Controller. Brugermanual
 Forside Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK DC-Motor Controller Brugermanual Firmware V4.00 Produkt indhold 1 styreboks til styring af 1 DC-motor. 1 strømforsyning 100 240 volt
Forside Jægergårdsgade 152/05A DK-8000 Aarhus C DENMARK WWW.WAHLBERG.DK DC-Motor Controller Brugermanual Firmware V4.00 Produkt indhold 1 styreboks til styring af 1 DC-motor. 1 strømforsyning 100 240 volt
Øvelse i kvantemekanik Kvantiseret konduktivitet
 29 Øvelse i kvantemekanik Kvantiseret konduktivitet 5.1 Indledning Denne øvelse omhandler et fænomen som blandt andet optræder i en ganske dagligdags situation hvor et mekanisk relæ afbrydes. Overraskende
29 Øvelse i kvantemekanik Kvantiseret konduktivitet 5.1 Indledning Denne øvelse omhandler et fænomen som blandt andet optræder i en ganske dagligdags situation hvor et mekanisk relæ afbrydes. Overraskende
Bilag til den indsigelse, som sommerhusgrundejerforeningerne på Samsø har fremsendt til Skov- og Naturstyrelsen den 27. april 2012.
 Bilag til den indsigelse, som sommerhusgrundejerforeningerne på Samsø har fremsendt til Skov- og Naturstyrelsen den 27. april 2012. Bilagets formålet: Bilaget dokumenterer, at der fra de i lokalplanen
Bilag til den indsigelse, som sommerhusgrundejerforeningerne på Samsø har fremsendt til Skov- og Naturstyrelsen den 27. april 2012. Bilagets formålet: Bilaget dokumenterer, at der fra de i lokalplanen
Opgavesæt udviklet til kursus 48115. Grundlæggende elektronik på mobile maskiner 2. Udviklet i 2015
 Opgavesæt udviklet til kursus 48115 Grundlæggende elektronik på mobile maskiner 2 Udviklet i 2015 Ministeriet for Børn, Undervisning og Ligestilling (april, 2016). Materialet er udviklet af Metalindustriens
Opgavesæt udviklet til kursus 48115 Grundlæggende elektronik på mobile maskiner 2 Udviklet i 2015 Ministeriet for Børn, Undervisning og Ligestilling (april, 2016). Materialet er udviklet af Metalindustriens
Tips og vejledning vedrørende den tredelte prøve i AT, Nakskov Gymnasium og HF
 Tips og vejledning vedrørende den tredelte prøve i AT, Nakskov Gymnasium og HF Den afsluttende prøve i AT består af tre dele, synopsen, det mundtlige elevoplæg og dialogen med eksaminator og censor. De
Tips og vejledning vedrørende den tredelte prøve i AT, Nakskov Gymnasium og HF Den afsluttende prøve i AT består af tre dele, synopsen, det mundtlige elevoplæg og dialogen med eksaminator og censor. De
Randers Fjords Færgefart
 Randers Fjords Færgefart Teknisk gennemgang og prisoverslag for motorudskiftning, opgradering af fremdrivningssystem, samt forbedring af arbejdsmiljøet på M/F Ragna FORELØBIG Horsens den 04.06.07 A/S JØRGEN
Randers Fjords Færgefart Teknisk gennemgang og prisoverslag for motorudskiftning, opgradering af fremdrivningssystem, samt forbedring af arbejdsmiljøet på M/F Ragna FORELØBIG Horsens den 04.06.07 A/S JØRGEN
CIRKEL ENERGI Præsenterer Evance Wind Iskra R9000. Temadag om mini- og husstandsmøller
 CIRKEL ENERGI Præsenterer Evance Wind Iskra R9000 Temadag om mini- og husstandsmøller Evance Winds Historie Grundlagt i 1999 stor vind fra Carter, alle arbejder stadig hos Evance. Forskning og udvikling
CIRKEL ENERGI Præsenterer Evance Wind Iskra R9000 Temadag om mini- og husstandsmøller Evance Winds Historie Grundlagt i 1999 stor vind fra Carter, alle arbejder stadig hos Evance. Forskning og udvikling
Brydningsindeks af vand
 Brydningsindeks af vand Øvelsesvejledning til brug i Nanoteket Udarbejdet i Nanoteket, Institut for Fysik, DTU Rettelser sendes til Ole.Trinhammer@fysik.dtu.dk 15. marts 2012 Indhold 1 Indledning 2 2 Formål
Brydningsindeks af vand Øvelsesvejledning til brug i Nanoteket Udarbejdet i Nanoteket, Institut for Fysik, DTU Rettelser sendes til Ole.Trinhammer@fysik.dtu.dk 15. marts 2012 Indhold 1 Indledning 2 2 Formål
Kommentarer til matematik B-projektet 2015
 Kommentarer til matematik B-projektet 2015 Mandag d. 13/4 udleveres årets eksamensprojekt i matematik B. Dette brev er tænkt som en hjælp til vejledningsprocessen for de lærere, der har elever, som laver
Kommentarer til matematik B-projektet 2015 Mandag d. 13/4 udleveres årets eksamensprojekt i matematik B. Dette brev er tænkt som en hjælp til vejledningsprocessen for de lærere, der har elever, som laver
Stx matematik B december 2007. Delprøven med hjælpemidler
 Stx matematik B december 2007 Delprøven med hjælpemidler En besvarelse af Ib Michelsen Ikast 2012 Delprøven med hjælpemidler Opgave 6 P=0,087 d +1,113 er en funktion, der beskriver sammenhængen mellem
Stx matematik B december 2007 Delprøven med hjælpemidler En besvarelse af Ib Michelsen Ikast 2012 Delprøven med hjælpemidler Opgave 6 P=0,087 d +1,113 er en funktion, der beskriver sammenhængen mellem
AARHUS UNIVERSITET. Det naturvidenskabelige fakultet 3. kvarter forår OPGAVESTILLER: Allan H. Sørensen
 AARHUS UNIVERSITET Det naturvidenskabelige fakultet 3. kvarter forår 2006 FAG: Elektromagnetisme OPGAVESTILLER: Allan H. Sørensen Antal sider i opgavesættet (inkl. forsiden): 5 Eksamensdag: fredag dato:
AARHUS UNIVERSITET Det naturvidenskabelige fakultet 3. kvarter forår 2006 FAG: Elektromagnetisme OPGAVESTILLER: Allan H. Sørensen Antal sider i opgavesættet (inkl. forsiden): 5 Eksamensdag: fredag dato:
Optimale konstruktioner - når naturen former. Opgaver. Opgaver og links, der knytter sig til artiklen om topologioptimering
 Opgaver Opgaver og links, der knytter sig til artiklen om solsikke Opgave 1 Opgave 2 Opgaver og links, der knytter sig til artiklen om bobler Opgave 3 Opgave 4 Opgaver og links, der knytter sig til artiklen
Opgaver Opgaver og links, der knytter sig til artiklen om solsikke Opgave 1 Opgave 2 Opgaver og links, der knytter sig til artiklen om bobler Opgave 3 Opgave 4 Opgaver og links, der knytter sig til artiklen
Fremtidens bilteknologier
 Fremtidens bilteknologier Baggrund og formål Internationale ønsker om reduktion af energiforbrug og emissioner i transportsektoren har medført skærpede krav og fokus på de tekniske muligheder for at indfri
Fremtidens bilteknologier Baggrund og formål Internationale ønsker om reduktion af energiforbrug og emissioner i transportsektoren har medført skærpede krav og fokus på de tekniske muligheder for at indfri
Fremstil en elektromagnet
 Fremstil en elektromagnet Fremstil en elektromagnet, og find dens poler. 3.1 5.6 -Femtommersøm - Isoleret kobbertråd, 0,5 mm -2 krokodillenæb - Magnetnål - Afbryder - Clips Fremstil en elektromagnet, der
Fremstil en elektromagnet Fremstil en elektromagnet, og find dens poler. 3.1 5.6 -Femtommersøm - Isoleret kobbertråd, 0,5 mm -2 krokodillenæb - Magnetnål - Afbryder - Clips Fremstil en elektromagnet, der
Miljøvurdering af ForskEL og ForskVE-programmerne 2014
 Miljøvurdering af ForskEL og ForskVE-programmerne 2014 Indhold 1. Resumé 1 2. Indledning 2 3. Målsætninger og udmøntning af ForskEL 14 og ForskVE 14 4 4. Vurdering af projekternes miljøpåvirkninger 6 4.1
Miljøvurdering af ForskEL og ForskVE-programmerne 2014 Indhold 1. Resumé 1 2. Indledning 2 3. Målsætninger og udmøntning af ForskEL 14 og ForskVE 14 4 4. Vurdering af projekternes miljøpåvirkninger 6 4.1
Dronninglund Gymnasium Fysik skriftlig eksamen 27. maj 2011
 Opgave 1. Solfanger Det viste anlæg er et ventilationssystem, som opvarmer luft udefra og blæser den ind i huset. Luften opvarmes idet, den strømmer langs en sort metalplade, der er opvarmet af solstrålingen.
Opgave 1. Solfanger Det viste anlæg er et ventilationssystem, som opvarmer luft udefra og blæser den ind i huset. Luften opvarmes idet, den strømmer langs en sort metalplade, der er opvarmet af solstrålingen.
a og b Den magnetiske kraftlov Og måling af B ved hjælp af Tangensboussole
 3.1.2. a og b Den magnetiske kraftlov Og måling af B ved hjælp af Tangensboussole Udført d. 15.04.08 Deltagere Kåre Stokvad Hansen Max Berg Michael Ole Olsen 1 Formål: Formålet med øvelsen er at måle/beregne
3.1.2. a og b Den magnetiske kraftlov Og måling af B ved hjælp af Tangensboussole Udført d. 15.04.08 Deltagere Kåre Stokvad Hansen Max Berg Michael Ole Olsen 1 Formål: Formålet med øvelsen er at måle/beregne
Magnetisme og harddisk-teknologi
 Magnetisme og harddisk-teknologi 10030 Fysik og Nanoteknologi Februar 010 af Claus Schelde Jacobsen (DTU Fysik) csj@fysik.dtu.dk Mikkel Fougt Hansen (DTU Nanotech) mikkel.hansen@nanotech.dtu.dk 010 Version:
Magnetisme og harddisk-teknologi 10030 Fysik og Nanoteknologi Februar 010 af Claus Schelde Jacobsen (DTU Fysik) csj@fysik.dtu.dk Mikkel Fougt Hansen (DTU Nanotech) mikkel.hansen@nanotech.dtu.dk 010 Version:
Matematik C. Cirkler. Skrevet af Jacob Larsen 3.år HTX Slagelse Udgivet i samarbejde med Martin Gyde Poulsen 3.år HTX Slagelse.
 Cirkler Skrevet af Jacob Larsen 3.år HTX Slagelse Udgivet i samarbejde med Martin Gyde Poulsen 3.år HTX Slagelse Side Indholdsfortegnelse Cirklen ligning Tegning af cirkler Skæring mellem cirkel og x-aksen
Cirkler Skrevet af Jacob Larsen 3.år HTX Slagelse Udgivet i samarbejde med Martin Gyde Poulsen 3.år HTX Slagelse Side Indholdsfortegnelse Cirklen ligning Tegning af cirkler Skæring mellem cirkel og x-aksen
Forsøg med magneter (permanente magneter)
") Forsøg med magneter (permanente magneter) Hvis der ikke er plads nok til notater her på papiret, så lav tegninger, forklaringer og noter resultater i dit hæfte. 1. Læg en magnet på et stykke flamingoplade
Forsøg med magneter (permanente magneter) Hvis der ikke er plads nok til notater her på papiret, så lav tegninger, forklaringer og noter resultater i dit hæfte. 1. Læg en magnet på et stykke flamingoplade
Impuls og kinetisk energi
 Impuls og kinetisk energi Peter Hoberg, Anton Bundgård, and Peter Kongstad Hold Mix 1 (Dated: 7. oktober 2015) 201405192@post.au.dk 201407987@post.au.dk 201407911@post.au.dk 2 I. INDLEDNING I denne øvelse
Impuls og kinetisk energi Peter Hoberg, Anton Bundgård, and Peter Kongstad Hold Mix 1 (Dated: 7. oktober 2015) 201405192@post.au.dk 201407987@post.au.dk 201407911@post.au.dk 2 I. INDLEDNING I denne øvelse
Producerer eller importerer du elmotorer? Så vær opmærksom: Der er krav fra juni 2011
 Producerer eller importerer du elmotorer? Så vær opmærksom: Der er krav fra juni 2011 Der er krav om miljøvenligt design (ecodesign) af elmotorer. er krav om produktudformning, der tilgodeser eksempelvis
Producerer eller importerer du elmotorer? Så vær opmærksom: Der er krav fra juni 2011 Der er krav om miljøvenligt design (ecodesign) af elmotorer. er krav om produktudformning, der tilgodeser eksempelvis
Lineære modeller. Taxakørsel: Et taxa selskab tager 15 kr. pr. km man kører i deres taxa. Hvis vi kører 2 km i taxaen koster turen altså
 Lineære modeller Opg.1 Taxakørsel: Et taxa selskab tager 15 kr. pr. km man kører i deres taxa. Hvis vi kører 2 km i taxaen koster turen altså Hvor meget koster det at køre så at køre 10 km i Taxaen? Sammenhængen
Lineære modeller Opg.1 Taxakørsel: Et taxa selskab tager 15 kr. pr. km man kører i deres taxa. Hvis vi kører 2 km i taxaen koster turen altså Hvor meget koster det at køre så at køre 10 km i Taxaen? Sammenhængen
Ombygning af PC strømforsyninger
 Ombygning af PC strømforsyninger Jørgen Kragh OZ7TA Rev. 18. marts 2009 Hvad skal vi høre om? PC strømforsyningens virkemåde AT og ATX forsyninger Ombygningen Højere strøm eller spænding Omvikling Støjer
Ombygning af PC strømforsyninger Jørgen Kragh OZ7TA Rev. 18. marts 2009 Hvad skal vi høre om? PC strømforsyningens virkemåde AT og ATX forsyninger Ombygningen Højere strøm eller spænding Omvikling Støjer
Drevet af den nyeste Dyson digitale motor
 Den har taget syv år at udvikle, men nu har vi opnået noget helt revolutionerende inden for motordesign en af verdens mindste, fuldt integrerede 1600 W motorer. Det var bare begyndelsen for vores nyeste
Den har taget syv år at udvikle, men nu har vi opnået noget helt revolutionerende inden for motordesign en af verdens mindste, fuldt integrerede 1600 W motorer. Det var bare begyndelsen for vores nyeste