Kortlægning og teknisk måling
|
|
|
- Vibeke Bro
- 7 år siden
- Visninger:
Transkript

1 Kortlægning og teknisk måling Gruppe L5 01 Aalborg Universitet Landinspektøruddannelsens 5. semester December 2007
2 L-Studienævnet Fibigerstræde Aalborg Øst Tlf Titel: Kortlægning og teknisk måling Projektperiode: 3. september til 6. december 2007 Projektgruppe: L5 01 Synopsis: Rapporten omhandler gruppe L5 01 s afrapportering af projektet med temaet landmåling og kortlægning som gennemføres på 5. semester på landinspektøruddannelsen ved Aalborg Universitet. Rapporten er opdelt i fire faser. Første fase omhandler kortlægning med RTK. Anden fase omhandler bygningsafsætning samt afsætning af skel og veje. Tredje fase omhandler fotogrammetrisk kortlægning. I fjerde og sidste fase sammenlignes projektgruppens udarbejdede kortprodukter dels indbyderes med hinanden og dels i forhold til fire eksterne kortprodukter. Slutteligt konkluderes der på projektgruppens udarbejdede kortprodukter. Deltagere: Ejnar Kjær Flensborg Niels Kaare Hjaltelin Rasmussen Vejledere: Jens Juhl Peter Cederholm Antal ord: Opslagstal: 5 Bilagsantal og art: 28 udskrevne og 1 CD Rapportens indhold er frit tilgængeligt, men offentliggørelse (med kildeangivelse) må kun ske efter aftale med forfatterne.
3 FORORD Denne rapport er udarbejdet af projektgruppe L5 01 på landinspektøruddannelsens 5. Semester på Aalborg Universitet i Aalborg i perioden 3. september til 6. december Rapporten er en afrapportering af projektet med temaet landmåling og kortlægning og består af fire faser. I første fase beskrives udarbejdelsen af et teknisk kort og en højdemodel opmålt med Real Time Kinematisk (RTK) måling over et område i den sydøstlige del af Gug. I anden fase beskrives afsætningen af et mindre område skel og veje samt en bygning. I tredje fase beskrives den fotogrammetriske måling af samme område i Gug. I fjerde og sidste fase sammenlignes de udarbejdede kortprodukter dels indbyrdes med hinanden og dels i forhold til eksterne kortprodukter. Der fremstilles i alt følgende fem kortprodukter: RTK fremstillet teknisk kort (RTK kort), 1. fase RTK fremstillet digital terrænmodel (RTK DTM), 1. fase Fotogrammetrisk fremstillet teknisk kort (Foto kort), 3 fase Fotogrammetrisk fremstillet digital terrænmodel (Foto DTM), 3 fase Ortofoto fremstillet ud fra højdemodel og orientering (Ortofoto), 3 fase Til projektet er der benyttet fire forskellige instrumenter der er stillet til rådighed af Aalborg Universitet. Til al opmåling i 1. Fase er Leicas system 530 GPS med AAU nummer 10 benyttet. Der er kun målt til GPS referencen i 1. Fase. Til afsætningen af skel og veje med RTK i 2. Fase, er Trimble GPS R8 med en TSC2 controller og med AAU nummer 13 benyttet. Ved afsætningen blev der målt til GPS net. Til geometrisk nivellement i 2. Fase ved bygningsafsætningen blev nivelleringsinstrumentet Leica Sprinter 100/100M med nummeret benyttet. Til bygningsafsætningen blev en Leica Totalstation TCR 1105 med nr benyttet. Samtlige instrumenter er verificeret inden brug. Der er brugt forskellige programmer i forbindelse med projektet. Gennem hele projektet er GeoCAD brugt som CAD program til behandling af måledata fra RTK og fotogrammetri, til udarbejdning af afsætningsdata og til sammenligningerne af kortprodukterne i fjerde fase. Til at konvertere data fra RTK opmålingerne er landmålingsprogrammet TMK benyttet. Til udjævning af data i anden fase er MATLAB og Leica Geo Office benyttet. Til det fotogrammetriske arbejde i tredje fase er Image Station og ER Viewer benyttet. Gennem hele rapporten er kildehenvisninger skrevet i firkantede parenteser [eksempel, år, sidetal]. Ved opmålinger og afsætninger med RTK er der foretaget diverse notater i en målebog der er vedlagt denne rapport som bilag 1A. Til rapporten er der endvidere vedlagt en CD indeholdende samtlige opmålingsfiler inklusive de udskrevne bilag. Når der i rapporten henvises til opmålingsfiler, kan disse derfor kun læses på den vedlagte CD. En oversigt over samtlige opmålings og afsætningsfiler vedlagt som bilag 1B. Alle andre bilag er udskrevet og vedlagt. Projektets målgruppe er vejledere på landinspektørstudiet. Derfor forudsættes en masse forhåndsviden ved læsning af projektet, og der afrapporteres derfor ikke lærebogsstof i denne rapport. Vigtigst er kendskab til studievejledningen for L5 ved landinspektøruddannelsen, men også kendskab til TMK og GeoCAD samt MATLAB og udjævningsprogrammet Leica Geo Office. 3
4 INDHOLDSFORTEGNELSE 1. FASE KORTLÆGNING VED RTK MÅLING TEKNISK KORT RTK DTM GI PUNKTER MV PUNKTER KONTROLPUNKTER FASE AFSÆTNING AFSÆTNING AF SKEL OG VEJE BYGNINGSAFSÆTNING 16 3 FASE KORTLÆGNING VED FOTOGRAMMETRI BESKRIVELSE, KONTROL OG VURDERING AF BILLEDER BILLEDPYRAMIDEFREMSTILLING RELATIV ORIENTERING ABSOLUT ORIENTERING KONTROL AF YDRE ORIENTERING FOTOGRAMMETRISK TEKNISK KORT DIGITAL TERRÆNMODEL ORTOFOTO KONKLUSION PÅ 3. FASE FASE VURDERING AF FORSKELLIGE KORTLÆGNINGSMETODER FORVENTEDE SPREDNINGER FOR KORTPRODUKTER SAMMENLIGNING AF KORTPRODUKTER VURDERING PÅ 4. FASE 52 LITTERATURLISTE 54 4

5 1. FASE KORTLÆGNING VED RTK MÅLING Dette kapitel beskriver projektets første fase omhandlende fremstilling af et teknisk kort og en digital terræn model vha. RTK måling. Kapitlet består af fem afsnit. Først beskrives der i afsnit 1.1 Teknisk kort side 6 udarbejdelsen af det tekniske kort. Dernæst beskrives der i afsnit 1.2 RTK DTM side 8 fremstillingen af DTM. Herefter beskrives opmålingen af fire GI planfikspunkter i afsnittet 1.3 GI punkter side 9 og herefter beskrives og vurderes opmålingen af syv MV punkter i afsnittet 1.4 MV punkter side 11. Slutteligt beskrives og vurderes nogle opmålte kontrolpunkter, som benyttes i projektets tredje fase, i afsnittet 1.5 Kontrolpunkter side 13. Det tekniske kort, forkortes fremover RTK kort, og den digitale terrænmodel, forkortes fremover RTK DTM, udarbejdes over et område i den sydlige del af Aalborg, nærmere betegnet i Gug. Områderne kan ses på nedenstående figur 1.1, hvor det område der er valgt til det tekniske kort er afgrænset med rød og det område der er valgt at lave en terrænmodel over er afgrænset med blå. Afgrænsningen af områderne blev foretaget i samarbejde med vejlederne og begrundes derfor ikke yderligere. Figur 1.1 viser et udsnit af Gug, med områdeafgræsning for det tekniske kort og DTM 5
6 1.1 TEKNISK KORT Dette afsnit omhandler udarbejdelsen af projektgruppens RTK kort. Først beskrives der i afsnit hvilke krav der stilles til det tekniske kort inden opmålingen. Herefter beskrives fremstillingen af det tekniske kort samt hvordan opmålingen er forløbet i afsnit Slutteligt kontrolleres og vurderes de valgte løsninger i afsnit KRAVSPECIFIKATION FOR TEKNISK KORT Nedenfor er kravene til udarbejdelsen af det tekniske kort opstillet på baggrund af studievejledningen og projektgruppen. Krav fra studievejledningen er opridset. Krav fra projektgruppen er opstillet og begrundet. Krav fra studievejledningen: Kortet skal hovedsageligt fremstilles ved RTK måling med servicesystem GPS referencen og i KP2000J med højdeinformation i DVR90 Kortet skal fremstilles med udgangspunkt i TK3 standard Kortet skal omfatte ca. 5 parceller, som udvælges i samarbejde med vejlederne Kortet skal primært fremstilles ved RTK måling Krav opstillet af projektgruppen: Punkter skal tildeles koder fra AAU kodelisten som er indlagt i Leica GPS Punkter skal indmåles med en 3D kvalitet på 5 eller bedre Punkter som er nødvendige at måle ved bueskæring tildeles en kote ud fra nærtliggende punkter Bygningstemaet skal kontrolleres ved båndmål Ved at tildele punkterne koder efter den indlagt kodetabel på den udleverede GPS undgås konverteringsproblemer vha. TMK og efterfølgende indlæsning i GeoCAD. Ved opmåling registreres kun punkter med en præcision på 5 og derunder, da det færdigt udarbejdede kort skal holde en nøjagtighed bedre en 10 i planen. Ved kortfremstillingen skal genereres dummypunkter ud fra bueskæring ved punkter som ikke kan indmåles direkte. Disse dummypunkter får ikke umiddelbart tildelt nogen højde. Derfor skal der her til hvert enkelt punkt efterfølgende beregnes en højde ud fra et eller flere nærliggende målte punkters højde. Da det vigtigste tema i det udarbejdede tekniske kort er bygningstemaet kontrolleres dette ved båndmål. Man kunne også have valgt at kontrollere det udarbejdede kort yderligere ved at måle et antal kontrolmål mellem veldefinerede objekter i kortet. Dette er fravalgt da det vurderes tilstrækkeligt at kontrollere kortet ud fra bygningsdimensionerne. 6

7 1.1.2 FREMSTILLING AF DET TEKNISK KORT Det tekniske kort er fremstillet i GeoCAD på baggrund af RTK måling. Målingerne til det tekniske kort er foretaget i seks filer, se bilag 1B Oversigt over opmålingsfiler. Endvidere er målebogen vedlagt som bilag 1A. Efter fremstilling af kortet var der på den nordlige side af bygningerne syv vinkler der tydeligvis ikke var retvinklede. Dette skyldes at, der er blevet målt til skæringen mellem to døre som vist på figur 1.2 For at undgå disse ikke retvinklede hjørner i kortet er disse derfor konstrueret op. Figur 1.2 viser indhak i nordlig side af huse RTK kortet er fremstillet med udgangspunkt i TK standarden. Dog er koten til hække registreret ved bunden, hvilket fraviges fra TK standarden der forskriver at hække skal registreres ved top. RTK kortet er vedlagt på papirform som bilag 1C RTK kort og på elektronisk for som bilag 1C i ASCII format til åbning i GeoCAD KONTROL AF BYGNINGSDIMENSIONER Det vigtigste tema i det udarbejdede tekniske kort er bygningstemaet og derfor kontrolleres dette ved båndmål. Bygningsdimensionerne er blevet kontrolleret vha. stålbånd og disse afstande er sammenlignet med målte afstande i GeoCAD, se bilag 1D kontrol af bygningsdimensioner. Afvigelserne er præsenteret grafisk på Figur 1.3 Kontrol af bygningsdimensioner side 8. Der er målt 118 dimensioner hvoraf 14 frasorteres da hjørnerne er konstruerede op jf. afsnit Fremstilling af det teknisk kort side 7. Endvidere er to bygningsdimensioner frasorteret pga. for store afvigelser som følge af lange skrå mål igennem noget beplantning hvor det er åbenlyst at det ikke har været muligt at måle tilstrækkelig præcist med et målebånd. Således er der brugt 102 observationer til kontrollen. 7
8 FIGUR 1.3 KONTROL AF BYGNINGSDIMENSIONER Antal afvigelser inden for interval ; ; ; ; 5 5 ; 5 5 ; ; ; ; 45 Afvigelsesintervaller i mm Figur 1.3 viser en grafisk præsentation af antallet af afvigelser af bygningsdimensioner målt med stålbånd og i GeoCAD inden for 10 mm intervaller. Afvigelserne er udregnet som afstand målt i GeoCAD minus afstand målt med stålbånd Det ses at grafen over afvigelserne antyder en normalfordeling. Middelværdien er udregnet til 2,4 mm hvilket kan skyldes en systematisk fejl. Dette kan skyldes at ikke alle afstande er målt vandret samt at målebåndet måske ikke ved alle målinger har været strakt helt ud. Spredningen er udregnet til 18 hvilket vurderes tilfredsstillende og mere end fem gange bedre end TK3 standard. 1.2 RTK DTM Dette afsnit omhandler udarbejdelsen af den digitale terrænmodel. Først beskrives der i afsnit hvilke krav der stilles til terrænmodellen og dernæst beskrives kontrollen af den udarbejdede RTK DTM i afsnit KRAVSPECIFIKATION FOR DTM Nedenfor er kravene til udarbejdelsen af den digitale terrænmodel opstillet på baggrund af studievejledningen og projektgruppen. Krav fra studievejledningen er opridset. Krav fra projektgruppen er opstillet og begrundet. Krav fra studievejledningen: Den digitale terrænmodel skal etableres ved RTK måling med punkter som repræsenterer terrænets overflade Den digitale terrænmodel skal præsenteres med højdekurver med ½ meters ækvidistance Terrænmodellen skal overholde en højdenøjagtighed på 17, da det er kutymen at bruge 1/3 af kurveintervallet Den digitale terrænmodel skal kontrolleres ved måling af minimum 25 punkter 8
9 Krav fra projektgruppen: Terrænmodellen skal omfatte et ubebygget område som fladenivelleres, men modellen skal samtidig udvides med området hvor der er foretaget opmåling til det tekniske kort, da disse to områder grænser op til hinanden Der skal måles brudlinjer hvor der er markante ændringer i højden over en strækning, for at opnå en større nøjagtighed af terrænmodellen KONTROL AF RTK DTM Den digitale terrænmodel er udarbejdet og kontrolleret i GeoCAD. Den digitale terrænmodel er vedlagt som bilag 1E RTK DTM udprintet og på elektronisk ASCII format til åbning i GeoCAD. For at kontrollere den digitale terrænmodel er der målt 31 kontrolpunkter fordelt over modellen, se opmålingsfil txt. Spredningen er herefter beregnet i GeoCAD til 10 hvilket overholder den opstillede nøjagtighed på 17. Rapporten fra GeoCAD kan ses i bilag 1F spredning på DTM. 1.3 GI PUNKTER Dette afsnit omhandler hvorvidt der skal laves en transformation over indmålte GI punkter i forbindelse med at tilknytte det udarbejdede tekniske kort til det eksisterende net af fikspunkter. Først beskrives de indmålte GI punkter og disses koordinater sammenlignes med Valdemars. Dernæst beregnes transformationsparametrene for en eventuel transformation af det tekniske kort og der vurderes slutteligt om en transformation skal foretages eller ej OPMÅLTE PUNKTER Der er opmålt fire GI punkter nærmest området to gange. Det drejer sig om punkterne , , og Nabonøjagtigheden af GI punkter er jf. Valdemar bedre end 2 / KONTROL AF GI PUNKTER GI punkterne er indmålt to gange. For at kontrollere for grove fejl udregnes den direkte afvigelse mellem de to målinger og afvigelserne vurderes efter en fejlgrænse. Fejlgrænsen udregnes på baggrund af antagelsen om at målingerne er normalfordelte og med erfaringer fra KMS ang. RTK måling jf. [Jensen 2005, s ]. Således ligger 99,7 % af målingerne indenfor tre gange planspredningen:, 3,,, er grundfejlen og sættes erfaringsmæssig til 7,1 jf. [Jensen 2005, s. 174], er den afstandsafhængige fejl og sættes erfaringsmæssigt til 1,5 / jf. [Jensen 2005, s. 174] S er afstanden fra referencestationen som i dette tilfælde er Aalborg og derfor sættes til 5 for samtlige indmålte GI punkter 9
10 Fejlgrænsen mellem to dobbeltmålinger er da, 3 7,1 5 1,5 / 44 TABEL 1.1 VURDERING AF DOBBELTMÅLINGER Punkt Direkte afvigelse i mm Tabel 1.1 viser afvigelserne mellem første og anden måling af de fire GI punkter. De direkte afvigelser er udregnet som Det ses i tabel 1.1 at afvigelserne mellem dobbeltmålingerne ligger under den udregnede fejlgrænse på 44. For at give et overblik over afvigelserne mellem de opmålte midlede GI punkters koordinater og koordinaterne fra Valdemar er afvigelserne mellem disse indsat i tabel 1.2. Koordinaterne fra Valdemar er transformeret fra S34J til KP2000J inden sammenligningen. TABEL 1.2 SAMMENLIGNING AF DE OPMÅLTE MIDLEDE GI PUNKTER MED VALDEMAR Punkt Forskel i Easting i mm Forskel i Northing i mm Tabel 1.2 viser afvigelsen mellem de midlede koordinater og opgivne fra Valdemar VURDERING AF TRANSFORMATIONSPARAMETRE For at vurdere om det tekniske kort skal transformeres til det landsdækkende koordinatsystem er der i Matlab scriptet mattrans.m udregnet transformationsparametre for følgende fire forskellige transformationer. To translationer To translationer og en rotation To translationer og en skala To translationer, drejning og skala (Helmert) I Tabel 1.3 Transformationsparametre side 11 er de udregnede spredninger på vægtenheden indsat. Det er valgt at vurdere de forskellige transformationstyper i forhold til hinanden vha. spredningen på vægtenheden, da denne beskriver hvor godt de beregnede koordinater stemmer overens med Valdemars. Den lavest mulige spredning på vægtenheden foretrækkes. De resterende transformationsparametre kan ses i dokumentationsfilerne som er vedlagt som bilag: 1G, 1H, 1I, 1J. 10
11 TABEL 1.3 TRANSFORMATIONSPARAMETRE Spredning på vægtenheden i mm To translationer (bilag 1G) 14 To translationer, en rotation (bilag 1H) 15 To translationer, en skala (bilag 1I) 15 To translationer, en drejning, en skala (Helmert) (bilag 1J) 16 Tabel 1.3 viser spredningen på vægtenheden for de forskellige transformationstyper Som det ses af tabel 1.3 fås den laveste spredning på vægtenheden ved en translation. Skulle der foretages en transformation ville denne vælges. 1.4 MV PUNKTER Dette afsnit har til formål at vurdere MV planfikspunkters kvalitet og afmærkning. Dette gøres i afsnit ved at beskrive hvordan MV punkterne er opmålt og ved at vurderer MV punkternes koordinater i forhold til de opgivne koordinater fra Valdemar i afsnit Vurderingerne af MV punkterne foretages for at opbygge et kendskab til MV fikspunktsnettets nøjagtighed OPMÅLTE MV PUNKTER De syv indmålte MV punkter har følgende punktnumre: , , , , , og Notater til opmålingen kan ses i bilag 1A Målebog. Alle punkter er målt to gange. Opmålingerne er foretaget i filerne txt og txt og er vedlagt som bilag på CD KONTROL AF MV PUNKTER MV punkterne kontrolleres for grove fejl ved vurdering af de to målinger af samme punkt i forhold til hinanden. For at kontrollere for grove fejl er den direkte afvigelse mellem de to punkter udregnet. Den direkte afvigelse er udregnet som. Afvigelsen mellem dobbeltmålingerne vurderes i forhold til den tidligere udregnede fejlgrænse på 44 jf. afsnit Kontrol af GI punkter side 9. I Tabel 1.4 vurdering af dobbeltmåling side 12 er afvigelserne mellem dobbeltmålingerne indsat. 11
12 TABEL 1.4 VURDERING AF DOBBELTMÅLING Punktnummer Direkte afvigelse i mm Tabel 1.4 viser de direkte afvigelser mellem de to målinger af samme MV punkter. Det ses at ingen af punkternes afvigelser ligger over den tidligere udregnede fejlgrænse på 44 mm I efterfølgende Tabel 1.5 vurdering af dobbeltmålinger i forhold til Valdemar side 12, er afvigelserne mellem de midlede opmålte koordinater og de opgivne koordinater fra Valdemar indsat. KMS tilstræber en middelfejl bedre end 100 mm for MV punkter. Sammenholdes afvigelserne med denne middelfejl ligger én northing koordinat over. Ifølge [Jensen 2005, s. 132] vurderes MV punkterne typisk til at have en punktspredning på 10 til 60 mm. Sammenholdes afvigelserne med denne vurdering ligger fire northing koordinater over fejlgrænsen. TABEL 1.5 VURDERING AF DOBBELTMÅLINGER I FORHOLD TIL VALDEMAR Punktnummer Afvigelse i E, mm Afvigelse i N, mm Tabel 1.5 viser afvigelserne mellem de opmålte midlede koordinater og de opgive koordinater fra Valdemar 12
13 1.5 KONTROLPUNKTER Til brug for 3. fase i projektarbejdet skal der bruges koordinater til minimum 10 veldefinerede kontrolpunkter. Kontrolpunkterne har til formål at kontrollere orienteringerne i det fotogrammetriske arbejde som beskrives i 3. fase. Kontrolpunkterne behandles i denne første fase da de er målt fire gange. Ved alle fire opmålinger er RTK servicesystemet GPS referencen benyttet. Men ved to af målingerne er referencestation Aalborg benyttet og ved de to andre er referencestation i Støvring benyttet. Referencestation Aalborg ligger cirka 4 km væk fra opmålingsområdet og referencestation Støvring ligger cirka 22 km væk. De ti opmålte kontrolpunkter er nummereret fra 800 til 809. Opmålingsfilerne txt, txt, txt og txt. er vedlagt som bilag på CD. I bilag 1K Kontrolpunkter er spredningerne på opmålingerne til Aalborg referencen i forhold til de midlede koordinater fra første og anden opmåling udregnet. Spredningen på opmålingen til Støvring referencen i forhold til de midlede koordinater af første og anden måling til denne reference station kan ligeledes ses i bilaget. Afvigelserne er indsat i Tabel 1.6 Spredninger på opmåling af kontrolpunkter side 13. TABEL 1.6 SPREDNINGER PÅ OPMÅLING AF KONTROLPUNKTER Spredningerne på opmåling til Aalborg referencen i forhold til de midlede koordinater af første og anden opmåling Spredningen på opmåling til Støvring referencen i forhold til de midlede koordinater af første og anden måling E (mm) N (mm) H (mm) Tabel 1.6 viser spredningerne på opmåling til de to referencestationer beregnet i bilag 1K kontrolpunkter Det ses at der er væsentligt større spredning på Støvring referencen og derfor benyttes koordinater der er målt til Aalborg referencen i 3. fase. 13
14 2. FASE AFSÆTNING Denne fase omhandler afsætning at et mindre område skel og veje med RTK samt en bygningsafsætning med totalstation der beskrives i nævnte rækkefølge. 2.1 AFSÆTNING AF SKEL OG VEJE Dette afsnit omhandler afsætning af skel og veje. Først opstilles der i afsnit en kravspecifikation for hvordan gennemførelsen af afsætningen ønskes foretaget. Dernæst beskrives i afsnit udarbejdelsen af afsætningsdataene og slutteligt vurderes afsætningen i afsnit KRAVSPECIFIKATION FOR AFSÆTNINGEN AF SKEL OG VEJE Nedenfor er kravene til afsætningen af skel og veje opstillet på baggrund af studievejledningen og projektgruppen. Krav fra studievejledningen er opridset. Krav fra projektgruppen er opstillet og begrundet. Krav fra studievejledningen: Afsætningen foretages ved RTK måling med servicesystem GPS net og i KP2000J Afsætningen skal kontrolmåles med RTK måling med servicesystem GPS net og i KP2000J Afsætningen skal kontrolleres ved beregning af koordinatdifferencer i GeoCAD Afsætningen skal omfatte minimum 50 punkter Vejens centerlinjer afsættes så afstanden mellem stationerne er 10 meter Krav opstillet af projektgruppen: Afsætningen skal foregå på træpæle med kryds på toppen Afsætningen og kontrolmålingen foretages uden højder Der kræves en spredning ved kontrolopmåling på maksimalt 4 Der ses bort fra afstandskorrektioner Der angives ikke højder på afsætningen, da dette er uden relevans for denne øvelse i afsætning af skel og veje med RTK. Der kræves en spredning ved kontrolopmålingen på maksimalt 4, da dette vurderes realistisk at opnå og almindeligt i praksis. Som følge heraf ses bort fra afstandskorrektioner som følge af valgte afbildning og reduktion til referenceellipsoiden da disse har ringe indflydelse sammenholdt med den ønskede præcision. 14
15 2.1.2 UDARBEJDELSE AF AFSÆTNINGSDATA FOR SKEL OG VEJE Konstruktionen af afsætningsdataene blev udarbejdet i GeoCAD med udgangspunkt i en udleveret DXF fil samt det RTK kortet. DXF filen indeholdte afsætningsdata til et mindre område skel og veje i et lokalt koordinatsystem. Først blev DXF filen konverteret til GeoCAD format og indlæst sammen med det tekniske kort således var filen i KP2000J (uden hensyntagen til fejlen der begås). Herefter konverteres hele projektet til UTM EUREF89 for at kunne indlæse et ortofoto som blev brugt til at fastlægge hvor afsætningen skulle foretages. Efter placeringen af afsætningen konverters der tilbage til KP2000J. Dernæst blev der foretaget en stationeringsberegning, så vejene afsættes som centerlinje med 10 meters mellemrum. Slutteligt blev afsætningspunkterne nummereret med numre fra 6000 til Koordinatfilen blev genereret og afsætningen blev foretaget med Trimble GPS. Koordinatfilen gr01skelogveje.csv er vedlagt på CD VURDERING AF AFSÆTNINGEN AF SKEL OG VEJE Kontrolopmålingen blev foretaget i filen csv, som er vedlagt på CD. Dataene fra kontrolopmålingen indlæses, sammen med de udarbejdede afsætningsdata, i GeoCAD og koordinatafvigelserne mellem disse beregnes. For at vurdere koordinatafvigelserne beregnes en maksimal fejlgrænse jf. [Jensen 2005, s.157]. 3 æ æ / er spredningen i planen, for hhv. afsætningen og kontrolopmålingen, med servicesystem GPS net. Denne spredning udregnes med formlen: æ / er grundfejlen og sættes til 6,6 jf. [Jensen 2005, s. 174], er den afstandsafhængige fejl som sættes til 0,8 / jf. [Jensen 2005, s.174] S er afstanden fra området til nærmeste referencestation (Hals) og sættes til 24 Værdierne indsættes i formlen og en spredning i planen udregnes: æ / 6,6 24 0,8 / 26 Den maksimale fejlgrænse for spredningen i planen kan nu udregnes: Der er nu udregnet en maxfejlgrænse på 109 mm for hvor stor spredningen af de afsatte punkter må afvige. Koordinatafvigelserne mm. er udregnet i Bilag 2A Koordinatdifferencer skel og veje. Den gennemsnitlige afvigelse er på 26, og der er udregnet en spredning på de afsatte punkter på 37 hvilket overholder den i kravspecifikationen opsatte grænse på 40. Én enkelt koordinatafvigelse er udregnet til 127 og denne overstiger fejlgrænsen på 109 og må derfor konkluderes at være en grov fejl som ville skulle tjekkes hvis det var en reel afsætning. De resterende afvigelser er under fejlgrænsen og konkluderes således fri for grove fejl. 15
16 2.2 BYGNINGSAFSÆTNING Dette afsnit omhandler afsætning af modullinjer til en del af et større byggeri. Først opstilles der i afsnit en kravspecifikation for hvordan gennemførelsen af afsætningen ønskes foretaget. Dernæst beskrives der i afsnit hvordan udjævningen af det geometriske nivellement foretages. Herefter beskrives der i afsnit hvordan udjævningen af koordinaterne til hjælpepunkterne som foretages i Leica Geo Office er udarbejdet. Leica Geo Office vil fremover forkortes LGO. I afsnit beskrives udarbejdelsen af afsætningsdata. Slutteligt vurderes bygningsafsætningen i afsnit KRAVSPECIFIKATION FOR BYGNINGSAFSÆTNINGEN Nedenfor er kravene til bygningsafsætningen opstillet på baggrund af studievejledningen og projektgruppen. Krav fra studievejledningen: Der skal etableres et net af fire hjælpepunkter i et lokalt koordinatsystem Hjælpepunkterne skal dobbeltmåles med RTK i servicesystem GPS referencen og i KP 2000J og DVR90 Hjælpepunkternes koordinater beregnes ved udjævning efter mindste kvadraters princip, i LGO Udjævningen skal foretages på baggrund af dobbeltmåling med RTK samt ved terrestriske observationer med totalstation Højden til hjælpepunkterne skal fastlægges ved geometrisk dobbelt nivellement mellem fire højdefikspunkter i DVR90 Der skal afsættes fire modullinjer forskudt ca. 1 meter fra bygningshjørnet med søm i træpæl Afsætningen skal kontrolleres i marken ved måling med totalstation Krav fra projektgruppen: Afsætningen skal være så nøjagtig som muligt, hvilket vurderes til 1 2 Højderne til hjælpepunkterne skal udjævnes efter mindste kvadraters princip vha. fremstillet Matlab script UDJÆVNING AF GEOMETRISK NIVELLEMENT Der blev etableret fire hjælpepunkter til bygningsafsætningen, punkt 400, 401, 402 og 403. Imellem disse og fire GI højdefikspunkter blev der lavet et geometrisk dobbelt nivellement for at bestemme højderne til hjælpepunkterne. Der er nivelleret mellem de fire højdefikspunkter som ligger nærmest området, dette drejer sig om punkterne: , , og Nivellementet er skitseret på Figur 2.1 Nivellementsskitse side 17. Højderne udjævnes disse efter mindste kvadraters princip i et udarbejdet Matlab script, der er vedlagt som i bilag 2B Udjaevning. 16
17 FIGUR 2.1 NIVELLEMENTSSKITSE Figur 2.1 viser en skitse over det geometriske nivellement Udjævningen i Matlab scriptet gennemføres i to trin. Første trin er en fri udjævning hvor højden til ét fikspunkt fastholdes dvs. spredningen for et fikspunkt sættes til 0,005 m og for de resterende tre fikspunkter sættes spredningen til 10 m. Kilometerspredningen sættes til 3 / jf. [Jensen, 2007 s. 8]. De øvrige observationer vægtes efter: er kilometerspredningen L er længden af et nivellement Den frie udjævning laves for at vurdere om målingerne passer indbyders overens. Variansfaktoren sættes a priori lig 1. Resultatet af udjævningen kan ses ved at køre scriptet. Variansfaktoren a posteriori bliver 0,68 hvilket indikerer at der er nivelleret bedre end forventet. Samtlige normaliserede residualer ligger inden for fejlgrænsen på 3 og nivellementet konkluderes derfor fri fra grove fejl. Andet trin er den fastholdte udjævning. Variansfaktoren sættes også her a priori til 1. Her vægtes alle højdefikspunkterne med 5 da dette er en sandsynlig nøjagtighed for højdefikspunkter. Variansfaktoren a posteriori bliver her 0,78 hvilket igen indikerer at observationerne er bedre end ventet. Alle de normaliserede residualer er indenfor fejlgrænsen på 3 hvilket indikerer at der kun ringe netspændinger. De udjævnede højder til hjælpepunkterne benyttes nu i det videre projekt UDJÆVNING I LGO Formålet med dette afsnit er at beskrive hvorledes koordinaterne til hjælpepunkterne ved bygningsafsætningen er bestemt vha. udjævning i LGO. Hjælpepunkterne er målt to gange med RTK og ved fem frie, halve satsers, opstillinger med totalstation. Der blev valgt at opmåle hjælpepunkterne to gange med RTK da dette netop giver tilstrækkeligt materiale til at der senere kan foretages en fri udjævning af GPS vektorer. Der blev valgt at måle med halve satser da der dermed kan bruges digital lagring på totalstationen. Inden der foretages en udjævning i LGO indstilles nogle parametre i programmet. Det er valgt kun at beskrive de relevante parametre. Under general parameters sættes spredningen på en horisontalretning til 1, spredningen på en afstand til 2 og spredningen på en zenitdistance til 1 jf. [Jensen, 2005, s. 182]. 17
18 Herudover sættes centreringsspredning på såvel GPS rover som reference til 1, da det skønnes at der kan centreres på 1 ved indmåling af hjælpepunkterne. Udjævningen i LGO foregår i tre trin. Første trin er en fri udjævning af GPS observationer, andet trin er en fri udjævning af de terrestriske observationer og sidste trin er en fri udjævning af samtlige observationer (GPS og terrestrisk). Der foretages ikke en fastholdt udjævning med inddragelse af GI planfikspunkter grundet tekniske problemer med LGO. Resultaterne af udjævningen vurderes ud fra en F test, en W test og ud fra konfidensellipser. F testen er variansfaktoren a posteriori. Variansfaktoren sættes a priori til 1. Ligger F testen langt fra startværdien én genberegnes udjævningen men en a priori værdi svarende til F testens værdi i de første to udjævninger. [Cederholm 2007] W testen er de normaliserede residualer og skal ligge inden for 3 jf. [Cederholm 2000, s.48]. Hvis et normaliseret residual antager en værdi uden for 3 betragtes denne som en grov fejl. Konfidensellipserne vurderes ud fra form og størrelse, da dette beskriver punktets præcision. I det følgende beskrives de tre udjævningstrin. FRI UDJÆVNING AF GPS Koordinaterne til hjælpepunkterne indlæses i LGO og udjævningen beregnes. Udjævningsrapporten er vedlagt som bilag 2C LGO Fri udjævning af GPS vektorer. Resultat af udjævning: Variansfaktor a posteriori = 0,97 hvilket vurderes acceptabelt, da dette giver udtryk for at observationerne er bedre end forventet W test (største værdi) = 1,96, hvilket vurderes acceptabelt, da det er under 3 Konfidensellipser: Det var forventet at ellipserne ville være let cigarformede grundet forskellen i spredning på easting og northing koordinaten som følge af områdets geografiske placering på jorden [Cederholm, 2006]. Udjævningen vurderes at være forløbet korrekt da ellipserne er lige store, og dermed er alle punkter bestemt lige godt. Relativt er punkterne bestemt med en præcision på 2 4 hvilket vurderes realistisk. GPS observationerne vurderes at være udjævnet korrekt og passer derfor indbyrdes overens. Der fortsættes derfor til udjævning af terrestriske observationer. FRI UDJÆVNING AF TERRESTRISKE OBSERVATIONER Observationerne fra den terrestriske opmåling med totalstation indlæses i LGO og udjævningen beregnes. Resultatet af udjævningen kan ses i bilag 2D LGO Fri udjævning af terrestriske observationer. Resultat af udjævning: Variansfaktor a posteriori = 0,41, hvilket tyder på at målingerne er bedre end først antaget og derfor stadig acceptable W test (største værdi) = 1,96, hvilket vurderes acceptabelt, da det er under 3 Konfidensellipser: Bemærk at ellipserne er meget små samt lige store. Hermed kan konkluderes at de terrestriske observationer har været meget nøjagtige. At ellipserne er lige store giver udtryk for at udjævningen er forløbet optimalt og at alle punkter dermed er bestemt med samme nøjagtighed. Der fortsættes derfor til den samlede udjævning 18
19 FRI UDJÆVNING AF GPS OG TERRESTRISKE OBSERVATIONER Observationerne fra den terrestriske opmåling med totalstation og koordinaterne til hjælpepunkterne indlæses i LGO og udjævningen beregnes. Resultatet af udjævningen kan ses i bilag 2E LGO Samlet fri udjævning. Resultat af udjævning: Variansfaktor a posteriori = 0,33 hvilket tyder på at målingerne er bedre end først antaget og derfor acceptable W test (største værdi) = 1,96, hvilket vurderes acceptabelt, da det er under 3 Konfidensellipserne vurderes tilfredsstillende, da disse er lige store og at såvel halve storakse som halve lilleakse er 1, hvilket indikerer at udjævningen er gennemført korrekt, og at punkterne er bestemt med samme præcision Udjævningen af hjælpepunkterne er nu færdig og koordinaterne eksporteres til en koordinatfil UDARBEJDELSE AF AFSÆTNINGSDATA FOR BYGNINGSAFSÆTNING Konstruktionen af afsætningsdataene blev udarbejdet i GeoCAD med udgangspunkt i en udleveret DXF fil. Filen indeholdte konstruktion af fire bygninger i et lokalt koordinatsystem hvoraf én bygning skal afsættes. Koordinaterne til hjælpepunkterne fra udjævningen i LGO og højderne fra udjævningen i Matlab benyttes til afsætningen. Hjælpepunkternes koordinater er i KP2000J. Afstanden mellem hjælpepunkterne er således opgivet på referenceellipsoiden. Da bygningen skal afsættes i et lokalt system (på jorden) med en nøjagtighed på 1 2 mm skal der korrigeres for den valgte afbildning samt reduktion til referenceellipsoiden således at koordinaterne kommer i et lokalt system. Dette gøres ved at skalere alle hjælpepunkterne med en målestoksfaktor k som udregnes ved: er afstandskorrektionen som følge af den valgte afbildning og opgives fra GeoCAD til 41 er afstandskorrektionen ved reduktion til referenceellipsoiden og udregnes ved: 10 H er den ortometriske højde (koten) og denne vurderes til 40 for projektområdet N er geoidehøjden (højden fra ellipsoiden til geoiden) og sættes jf. KMSTRANS til 38 er ellipsoidens krumningsradius som jf. [Jensen 2005, s. 39] er opgivet til m. udregnes således til: Målestoksfaktoren kan nu udregnes: ,
20 Hjælpepunkternes koordinater skaleres med den udregnede målestoksfaktor og bygningen transformers på plads så denne ligger inden for afsætningsområdet. Afsætningsdataene er nu færdigberegnet og bygningen afsættes VURDERING AF BYGNINGSAFSÆTNINGEN For at sikre mod grove fejl i afsætningen foretages en kontrolopmåling af de afsatte modullinjer. Kontrolopmålingen blev foretaget i marken ved at afsætte punkterne igen. Ved denne metode er det muligt allerede i marken at kontrollere afsætningen og derfor vælges denne metode. På Figur 2.2 Skitse over bygningsafsætningen side 20 er afsætningen skitseret. Afvigelserne fra kontrolopmålingen og højderne til de afsatte punkter kan ses i Tabel 2.1 Højder og afvigelser fra bygningsafsætningen side 20. FIGUR 2.2 SKITSE OVER BYGNINGSAFSÆTNINGEN Figur 2.2 viser en skitse over punktnumrene og deres placering ved afsætningen TABEL 2.1 HØJDER OG AFVIGELSER FRA BYGNINGSAFSÆTNINGEN Punkt Afvigelse i easting Afvigelse i northing Højde mm m mm m mm m mm m mm m mm m mm m mm m Tabel 2.1 viser højder til de afsatte punkter samt afvigelser i enten easting eller northing 20
21 Som det ses af Tabel 2.1 Højder og afvigelser fra bygningsafsætningen side 20 opfylder afsætningen nøjagtigheden på 1 2 som opstillet i Kravspecifikation for bygningsafsætningen side 16. Dokumentation for afsætningen kan ses i stakeoutlogfilen som er vedlagt som bilag 2F Stakeoutlog. Højderne til de afsatte punkter kan ses i koordinatfilen bygningsafsætningshøjder der er vedlagt som bilag 2H Bygningsafsætningshøjder. 21
22 FASE 3 KORTLÆGNING VED FOTOGRAMMETRI Denne fase omhandler kortlægning ved fotogrammetri. Der udarbejdes tre produkter i denne fase, en digital terrænmodel (Foto DTM), et teknisk kort (Foto kort) samt et ortofoto. For at fremstille disse tre produkter er der udleveret to luftfotos med en tilhørende kamerakalibreringsrapport. Kamerakalibreringsrapporten er vedlagt som bilag 3A Kamerakalibreringsrapport. Alt fotogrammetrisk arbejde udføres i ImageStation i koordinatsystem KP2000J og med højder i DVR90. Det er valgt ikke at beskrive indstillingen af hver enkelt parameter i ImageStation, da dette ikke vurderes relevant i forhold til målene for projektenheden. Derfor beskrives kun de indstillinger som projektgruppen vurderes at have relevans for løsningen og udarbejdelsen af produktet. Først beskrives de udleverede billeder i afsnittet 3.1 Beskrivelse, kontrol og vurdering af billeder side 22. Dernæst beskrives udarbejdelsen af billedpyramider i afsnit 3.2 Billedpyramidefremstilling side 24. Herefter beskrives og kontrolleres orienteringen af billederne i afsnit 3.3 Relativ orientering side 24, 3.4 Absolut orientering side 25 og 3.5 kontrol af ydre orientering side 27. Herefter beskrives udarbejdelsen af de tre produkter kortprodukter i afsnit 3.6 Fotogrammetrisk teknisk kort side 28, 3.7 digital terrænmodel side 28 og 3.8 ortofoto side 30. Slutteligt konkluderes der på 3. fase i afsnittet 3.9 Konklusion på 3. Fase side BESKRIVELSE, KONTROL OG VURDERING AF BILLEDER Som beskrevet i indledningen til kapitlet er der udleveret to digitale billeder over projektområdet. I dette afsnit beskrives først billederne i afsnit derefter beregnes i afsnit målforhold og i afsnit flyvehøjden. I afsnit udregnes overlappet og det kontrolleres i afsnit om billederne lever op til TK standardens krav til solhøjde. Endelig opsummeres der på de fundne størrelser i afsnit og der vurderes om billederne egner sig til fotogrammetrisk opmåling BESKRIVELSE AF DE UDLEVEREDE BILLEDER Fra kamerakalibreringsrapporten opridses at to udleverede digitale billeder er taget med et Vexcel Ultracam D Kamera. Billederne har en størrelse på pixels x 7500 pixels og pixelstørrelsen er 9 og kamerakonstanten er opgivet til 101,4. Størrelsen af billedet er 67,5 103,5. Ved at undersøge de digitale billeder nærmere vurderes billedkvaliteten tilstrækkelig god mht. belysning og farver for at kunne løse de fotogrammetriske stillede opgaver BEREGNING AF MÅLFORHOLD Det reelle målforhold er udregnet ved at måle pixelkoordinaterne på to veldefinerede punkter i ER viewer, beregne afstanden i pixler mellem de to punkter, gange med pixelstørrelsen på de 9 og derved få en afstand mellem de to punkter i billedet. Efterfølgende er afstanden mellem de samme to punkter målt på jorden i GeoCAD ved indlæsning af Aalborg Kommunes tekniske kort. Afstanden på jorden divideres med afstanden i billedet og herved fås et målforhold. For at få et bedre bud på det reelle målforhold er beregningerne gentaget tre gange for det udleverede billede 98 og to gange for billede 99. Der vil aldrig fås det samme tal da målforholdet i billederne ikke er konstant som følge af det er to centralprojektioner. Men for at få det bedst mulige bud er de to punkter hvorudfra målforholdet er beregnet valgt videst muligt i hvert sit diametralt modsatte hjørne. Resultatet af beregningerne er at målforholdet i billede 98 er 6103 og målforholdet i billede 99 er Beregningerne er ikke vedlagt denne rapport da det er lige så nemt at 22
23 beregne målforholdet ud fra de udleverede filer som det er at kontrollere de af projektgruppen udregnede målforhold BEREGNING AF FLYVEHØJDEN Når målforholdet er fundet kan den gennemsnitlige flyvehøjde for de to billeder bestemmes ved hjælp af kamerakonstanten der er opgivet til 101,4 101, BEREGNING AF LÆNGDEOVERLAP Længdeoverlappet bestemmes ud fra måling af pixler i ER viewer. Denne metode vælges da det hermed er muligt at bestemme overlappet hurtigt, sikkert og nemt. Det gøres ved først at måle pixel koordinaterne til de to hjørner fra det ene billede der kan findes i det andet billede. I alt fire hjørner måles, to i hvert billede. Der måles kun på den korte led, da der er på denne at længdeoverlappet er. Da de udleverede billeder er 7500 x pixler store måles på den led der er 7500 pixler bred. Herefter trækkes enten 0 eller 7500 fra afhængig af hvor 0,0 er defineret således der findes det antal pixler overlappet er. Dette divideres med den 7500 og herved fås den del af billedet der overlapper det andet. I det givne tilfælde fås hhv. 52 %, 55 %, 53 % og 51 %. Gennemsnittet af disse fire overlap er 53 % hvilket ikke lever op til TK standarden der foreskriver et overlap på 60 % + 5 % BEREGNING AF SOLHØJDE TK standarden foreskriver at de to billeder som benyttes til fotogrammetrisk måling skal være taget med en solhøjde større end 30 for at undgå for store skyggedannelser i billederne. Dette kontrolleres ved at udregne solhøjden i billederne ved: ø ø æ Genstandshøjden er højden på en vilkårlig genstand målt i ImageStation Skyggelængde er længden af den samme genstands skytte målt i ImageStation Solhøjden er således beregnet til hhv. 36, 33 og 41 på baggrund højden fra tre forskellige lygtepæle og deres skyggelængde. Det er valgt at måle højderne på genstandene i ImageStation frem for i marken, da dette vurderes tilstrækkeligt præcist til at konkludere hvorvidt solhøjden er ligger over eller under de anbefalede 30. Havde de udregnede solhøjder ligget tættere på eller under værdien 30 ville en kontrolmåling i marken være foretaget. 23
24 3.1.6 OPSUMMERING PÅ DE UDLEVEREDE BILLEDER I de foregående fem afsnit til er det vigtigste opsummeret i den følgende tabel 3.1 Pixelstørrelse i Kamerakonstant Gennemsnitligt Flyvehøjde Længdeoverlap Gennemsnitlig billede målforhold solhøjde 9 101, % 37 Tabel 3.1 viser de vigtigste parametre om de udleverede billeder På baggrund af at solhøjden er over 30 og billedkvaliteten er tilstrækkelig god konkluderes at de udleverede billeder egner sig til fotogrammetrisk opmåling. Endvidere er flyvehøjden beregnet og dermed kan den relative orientering påbegyndes i det følgende afsnit. 3.2 BILLEDPYRAMIDEFREMSTILLING For at kunne håndtere og arbejde hurtigere i, de 247 MB store, billeder i ImageStation laves billedpyramider af hvert billede. Billedpyramiderne laves i ImageStation Raster Utilities (ISRU). Gaussian metoden vælges til at fremstille billedpyramiderne da der derved opnås den bedste kvalitet. Der vælges at generere et Full Set, som danner ni billeder/ni overviews og hvormed der opnås den højeste hastighed ved at arbejde med billederne. 3.3 RELATIV ORIENTERING Ved den relative orientering sammenkobles de to billeder i forhold til hinanden vha. tie points. Først beskrives den relative orientering i afsnit Slutteligt vurderes denne i afsnit UDARABEJDELSE AF RELATIV ORIENTERING Den relative orientering foretages i ImageStation Digital Measuration (ISDM). Først oprettes et nyt projekt hvor parametre for koordinatsystem KP2000J med tilhørende højdesystem DVR90 indtastes. Herefter indtastes diverse værdier omhandlende den relative orientering. Der indtastes blandt andet den i afsnit udregnede værdi for flyvehøjden, kameradata fra kalibreringsrapporten og der vælges at bruge fem tie points i hvert billede, da der ønskes den bedst mulige orientering. Der vælges endvidere ikke at korrigeres for linsefortegningen, da denne ikke kendes nøjagtigt. Fra kamerakalibreringsrapporten vides blot at den har en maksimal værdi på VURDERING AF RELATIV ORIENTERING ImageStation generer en samlet rapport for både den relative og den absoluttet orientering. Denne er vedlagt som bilag 3B Ydre orienterings rapport. For at vurdere den fremstillede relative orientering vurderes på den udregnede spredning på parallakserne samt den største parallakse. Men førend de kan vurderes opstilles hvilke værdier der kan forventes. I fotogrammetrien kan forventes en nøjagtighed på cirka 4 samt 1/6 af pixelstørrelsen i billedet. [Udjævning 10]. Pixelstørrelsen i billedet er 9. Da der laves to målinger for hver parallakse vil den forventede nøjagtighed være kvadratrod to større. Den samlede nøjagtighed er dermed: 24
25 å å ,0 Dette gælder hvis observationerne var uafhængige. Imidlertid er de afhængige og derfor vurderes den forventede spredning på parallakserne til 5,0. Den udregnede spredning er på 2,0 ligger dermed under den forventede. For at udregne en maxfejlgrænse på en parallakse tages udgangspunkt i den udregnede spredning på 2,0. Da der laves to målinger for hver parallakse divideres med kvadratrod to for at få spredningen på en parallakse. Denne spredning forventes at være fri for systematiske og grove fejl og dermed normalfordelt. Således ligger 99,7 % indenfor tre gange spredningen: 2, ,2 Den største parallakse er på 4,0 og dermed inden for fejlgrænsen. På baggrund af spredningen på parallakserne og at den største parallakse ligger indenfor fejlgrænsen vurderes den relative orientering tilfredsstillende. 3.4 ABSOLUT ORIENTERING Som sidste led i den ydre orientering skal den absolutte orientering fastlægges. Ved den absolutte orientering transformeres billederne og dermed modellen til koordinatsystemet KP2000J med højdesystem DVR90. Dette gøres vha. paspunkter. For at kontrollere den absolutte orientering er der målt ti kontrolpunkter som beskrevet i afsnit 1.5 Kontrolpunkter side 12. Den absolutte orientering foretages, ligesom den relative, i ISDM. Der er målt to paspunkter i hvert hjørne af modellen, dvs. i alt otte paspunkter. Paspunkterne er nummereret fra punkt 700 til og med punkt 707. Opmålingsfilerne txt og txt er vedlagt på CD. Notater til opmålingen af paspunkter kan ses på målebogens side 31 som er vedlagt som bilag 1A Målebog. Samtlige paspunkter er kombinerede højde og planpaspunkter og er udvalgt så de fotogrammetriske opmålingsmetoder kan benyttes. At opfylde de fotogrammetriske opmålingsmetoder skal forstås på den måde at fx beliggenheden af paspunkterne skal være synlig i begge billeder, paspunktet skal være i god kontrast til omgivelserne osv. Paspunkterne er målt to gange. Placeringen af de enkelte paspunkter kan ses i bilag 3C Paspunktsoversigt og bilag 3D Paspunktsskitser. For at vurdere den fremstillede absolutte orientering vurderes på ud de udregnede Root Mean Square (RMS) værdier for hhv. x, y og z aksen fra orienteringsrapporten. For at kunne lave denne vurdering udregnes der i de følgende tre afsnit hvilke RMS værdier der kan forventes. Dette gøres ved først i afsnit at udregne hvor stor en spredning der kan forventes i planen. Dernæst udregnes den forventede spredning i højden i afsnit og herefter omregnes disse to spredninger til to RMS værdier i afsnit FORVENTET SPREDNING I PLANEN Det antages at spredningen på en koordinat i planen er afhængig af fire størrelser. For det første, nøjagtigheden hvormed et punkt kan måles fotogrammetrisk, for det næste, nøjagtigheden på en RTK måling ved måling af paspunkter, for det tredje, den forskel der er mellem centreringen af et punkt i fotogrammetrien og på jorden, og for det fjerde, pixelstørrelsen i billedet. Dermed opstilles følgende sammenhæng imellem de fire størrelser: 25
26 2 ø ø ø er fotogrammetriens nøjagtighed i planen der estimeres til fire mikrometer i billedet [Udjævning 10] er hvor godt vi måler med GPS i planen 13 ved en afstand mellem rover og referencestation på 4 [Jensen, 2005, s. 174] er forskellen mellem hvor godt vi kan definere et punkt i marken og i fotogrammetrien. Værdien estimeres til 20 ø er en spredningen afhængig af pixelstørrelsen. Fås ved at sætte mange forskellige mennesker til at måle det samme veldefinerede objekt mange gange ved pixelmåling. Værdien estimeres til en sjettedel af pixelstørrelsen [Udjævning 10]. Dette giver Den forventede punktspredningen i planen for de fotogrammetriske punkter kan nu udregnes: FORVENTET SPREDNING I HØJDEN I højden er det rimeligt at antage at spredningen er afhængig af nøjagtigheden hvormed der kan måles fotogrammetrisk, nøjagtigheden af et målt punkt med RTK, samt en forskel i centreringen af et punkt fotogrammetrisk og på jorden. Der opstilles derfor følgende sammenhæng: ø ø ø er nøjagtigheden i højden der estimeres til 0,08 af flyvehøjden 0, er hvor godt vi måler med GPS i højden ved en afstand mellem rover og referencestation på 4 14 [Jensen, 2005, s. 174] forskel mellem hvor godt højden er defineret i marken og i fotogrammetrien, værdien estimeres til 30 Spredningen i højden kan nu udregnes til: ø OMREGNING FRA SPREDNING TIL RMS Da de opgivne værdier er RMS værdier og ikke spredninger, omregnes fra punktspredningen i planen til RMS værdier ved at dividere med en størrelse der er over én, efter følgende sammenhæng: er spredningen m er antallet af observationer n er antallet af ubekendte størrelser 26
27 I planen blev der udregnet en koordinatspredning på 37. Der er målt otte paspunkter, men kun de syv benyttes da residualerne på punkt 703 var store som følge af at punktet ikke er veldefineret. Antallet af ubekendte i planen er fire,,, og dermed beregnes RMS i planen: I højden blev spredningen udregnet til 62. Her er der igen syv observationer og men nu tre ubekendte størrelser i højden, : ø VURDERING AF PASPUNKTER Efter det er blevet beregnet hvilke RMS værdier der kan forventes vurderes de opnåede resultater. De beregnede RMS værdier fra den ydre orienterings rapport er i planen: 14, 26 m. Dette er således acceptabelt da det umiddelbart ses at de beregnede RMS værdier ligger inden for en spredning på en RMS værdi. I højden er den udregnede RMS værdi 2 hvilket ligger langt under den forventede værdi på 47 mm. Orienteringsrapporten er vedlagt som bilag 3B Ydre orienteringsrapport. Til denne er det vigtigt at bemærke at de lige nævnte RMS værdier kun er beregnet ud fra paspunkterne og altså intet har at gøre med kontrolpunkterne Den absolutte orientering vurderes hermed tilfredsstillende. 3.5 KONTROL AF YDRE ORIENTERING Den ydre orientering kontrolleres vha. kontrolpunkter som måles i ImageStation. Resultatet af kontrollen kan ses i bilag 3B Ydre orienteringsrapport. Som beskrevet i afsnit 1.5 Kontrolpunkter side 12, benyttes en midling af kontrolpunkterne som er opmålt til Aalborg referencen. Kontrolpunkterne er målt med numre fra 800 til og med 809. Opmålingsfilerne txt og txt er vedlagt på CD. Notater til opmålingen af kontrolpunkter kan ses i målebogens side som er vedlagt i bilag 1A Målebog. Kontrolpunkternes placering er skitseret på bilag 3D Kontrolpunktsoversigt. For at vurdere kontrolmålingen benyttes de opstillede fejlgrænser fra afsnit Forventet spredning i planen side 25 og afsnit Forventet spredning i højden side 26. Da orienteringen er foretaget er der ingen ubekendte, og derfor er spredning = RMS. De udregnede værdier kan derfor direkte benyttes ved kontrollen. Dog skaleres værdierne med en faktor to som følge af unøjagtig måling i ImageStation. De udregnede fejlgrænser er sammen med RMS værdier fra orienteringsrapporten indsat i Tabel 3.1 Kontrol af ydre orientering side 27. TABEL 3.1 KONTROL AF YDRE ORIENTERING Fejlgrænse i X,Y RMS i X RMS i Y Fejlgrænse i Z RMS i Z Tabel 3.1 viser de udregnede fejlgrænser for kontrolpunkterne sammen med de reelle RMS afvigelser 27
28 Det ses af tabel 3.1 at RMS værdien i X ligger over fejlgrænsen. Det vurderes at denne afvigelse skyldes unøjagtig opmåling i ImageStation og dermed vurderes den ydre orientering tilfredsstillende. 3.6 FOTOGRAMMETRISK TEKNISK KORT Dette afsnit beskriver udarbejdelsen af det fotogrammetriske tekniske kort. I afsnit opstilles hvilke krav der stilles til udarbejdelsen og i afsnit beskrives arbejdsprocessen. Det udarbejdede tekniske kort er vedlagt som bilag 3F Foto kort KRAVSPECIFIKATION FOR DET FOTOGRAMMETRISKE TEKNISK KORT Nedenfor er kravene til Foto kortet opstillet på baggrund af studievejledningen og projektgruppen. Krav fra studievejledningen: Det tekniske kort skal udarbejdes med udgangspunkt i TK standard Kortet skal minimum omfatte objekttyper som er egnet til fotogrammetrisk indmåling over det samme område som det udarbejde RTK kort fra 1. fase. Se figur 1.1 side 5. Krav opstillet af projektgruppen: Der skal laves en feature tabel indeholdende samme koder som er benyttet ved udarbejdelsen af det tekniske kort til fase FREMSTILLING AF DET FOTOGRAMMETRISKE KORT Det tekniske kort fremstilles i ImageStation Digital Measuration (ISDM). Inden digitaliseringen blev der først udarbejdet en feature table i ImageStation Feature Collection (ISFC) som beskrevet ovenfor. Den udarbejdede feature tabel benyttes senere ved konvertering til GeoCAD. Det udarbejdede fotogrammetriske kort vurderes i fjerde fase. 3.7 DIGITAL TERRÆNMODEL Dette afsnit beskriver udarbejdelsen af den digitale terrænmodel. Først opstilles en kravspecifikation for hvordan modellen ønskes udarbejdet. Dernæst beskrives de valgte løsninger og slutteligt vurderes resultatet. Den digitale terrænmodel er vedlagt som bilag 3G Foto DTM KRAVSPECIFIKATION FOR FOTO DTM Nedenfor er kravene til den digitale terrænmodel opstillet på baggrund af studievejledningen og projektgruppen. Krav fra studievejledningen er opridset. Krav fra projektgruppen er opstillet og begrundet. Krav fra studievejledningen: Den digitale terrænmodel skal repræsentere terrænets overflade Terrænmodellen skal kontrolleres vha. de samme 25 punkter som benyttes til kontrol af højdemodellen i fase 1. Se afsnit Kontrol af RTK DTM side 9. 28
29 Krav fra projektgruppen: Terrænmodellen skal have en nøjagtighed på ca. 13 cm Terrænmodellen skal etableres med et grid på 3 x 3 m Erfaringen siger at der kan opnås en spredning på en terrænmodel på cirka ca. 0,2 af flyvehøjden [Jens Juhl]. Spredningen udregnet derved til: 0, , Grundet terrænets udformning vurderes at et 3x3 meter grid vil give en passende for at opnå den ønskede nøjagtighed. Hvis fx et grid på 10x10 meter var valgt, ville dette give en upræcis DTM grundet områdets kuperede terræn FREMSTILLING AF FOTO DTM Den digitale terrænmodel laves i ImageStation DTM Collection (ISDC). Der defineres først en grænse for hvor den digitale terrænmodel skal etableres. Grænsen digitaliseres mindst én grid inde i modellen (mindst 3 m), for at undgå interpolation mellem punkter indenfor og udenfor modellen, da dette vil medføre fejl i modellen. I indstillingerne for fremstillingen af Foto DTM, vælges terræn typen til Hilly da der på daværende tidspunkt ønskes at lave en overflademodel. Smoothing filter vælges til medium, da vi valgte Hilly som vores terræn. Smoothing filter er graden af hvor meget den udglatter de dannede punkter for at lave højder. Når terrænet er meget glat er en høj grad af udglatning tilrådelig. Når terrænet er kuperet foretrækkes en lavere grad (medium/lav) af smoothing KONTROL OG VURDERING AF FOTO DTM For at kontrollere den fotogrammetriske terrænmodel benyttes de samme 35 punkter som blev benyttet ved kontrol af den digitale terrænmodel fra fase 1, jf. afsnit Kontrol af RTK DTM side 9. Som beskrevet i afsnit Fremstilling af FOTO DTM side 29 er der foretaget en afgrænsning af den fotogrammetrisk fremstillede terrænmodel, hvilket har indskrænket antallet af kontrolpunkter som er målt med RTK på samme område. Derfor kontrolleres højdemodellen på baggrund af 21 punkter. Til kontrollen blev der benyttet et udleveret Matlab script som er fremstillet af Marketa Potuckova (Ekstern underviser ved Aalborg Universitet). Scriptet og dokumentationsrapporten er vedlagt som bilag 3F Kontrol af Foto DTM. Værdierne fra dokumentationsrapporten er indsat i Tabel 3.2 Kontrol af digital terrænmodel side 29. TABEL 3.2 KONTROL AF DIGITAL TERRÆNMODEL RMS = 0.10 m Mean = 0.09 m dz_max = 0.19 m Tabel 3.2. viser resultaterne fra kontrollen af Foto DTM Det ses i tabel 3.2 at der ved kontrol af Foto DTM er udregnet en RMS værdi på 10. Dette stemmer overens med den forventede nøjagtighed på 13 som blev opstillet i afsnit Kravspecifikation for Foto DTM side 28. Mean er gennemsnittet af afvigelserne og udregnet til 9. dz_max som er den maksimale afvigelse, og denne ligger inden for tre gange RMS, og vurderes derfor også tilfredsstillende. 29
30 Ved at indlæse terrænmodellen ovenpå stereomodellen ses, at langt de fleste punkter som er genereret over huse og andre genstande der rager op i terrænet, er placeret ovenpå disse genstande. Således er den fremstillede DTM tilnærmelsesvis en overflademodel, DSM. 3.8 ORTOFOTO Dette afsnit beskriver fremstillingen af ortofotoet. Først opstilles der i afsnit en kravspecifikation for hvordan ortofotoet ønskes fremstillet. Dernæst beskrives fremstillingen i afsnit Slutteligt vurderes det endelige resultat i afsnit Ortofotoet er vedlagt som bilag som bilag 3H Ortofoto KRAVSPECIFIKATION FOR ORTOFOTOET Nedenfor er kravene til ortofotoet opstillet på baggrund af studievejledningen og projektgruppen. Krav fra studievejledningen: Ortofotoet skal om muligt udarbejdes for den samlede model Krav fra projektgruppen: Pixelstørrelsen på jorden skal være 6, da dette cirka er pixelstørrelsen på jorden i de udleverede billeder FREMSTILLING AF ORTOFOTO For at kunne fremstille et ortofoto er det nødvendigt med et orienteret billede over området, samt en højdemodel. Efter den digitale terrænmodel er fremstillet og vurderet tilfredsstillende benyttes denne til produktionen. Ortofotoet fremstilles i ImageStation Base Rectifier (ISBR) efter indtastning af diverse parametre. Ved resampling af billedet vælges bilineær som interpolationsmetode, da det er den mest præcise VURDERING AF ORTOFOTO Ved at kontrollere ortofotoet i ER Viewer ses det, at der på nogle hustage og arealer omkring disse er fortegninger. Denne fortegning stammer fra den udarbejdede Foto DTM som nærmere er en DSM. Ortofotoets plannøjagtighed vurderes i fjerde fase. 3.9 KONKLUSION PÅ 3. FASE Ved placering af de otte kombinerede højde og planfikspunkter blev det tilstræbt af få paspunkterne placeret så langt ude i hjørnerne af modellen som muligt. Efterfølgende kan det diskuteres, at der kunne være opnået en bedre nøjagtighed ved fx at måle nogle højdepaspunkter længere ude i modellen. Dette ville være muligt, da højdeplanfikspunkter ikke skal være veldefineret i planen og derfor fx godt kan indmåles på en bar mark, hvor det ikke er muligt at placere et planpaspunkt. De indmålte paspunkter vurderes dog stadig tilstrækkeligt nøjagtige for at lave den absolutte orientering. 30
31 Et af formålene med at lave en DTM var at kunne lave et ortofoto. Derfor havde det været naturligt at indflette dette i kravspecifikationen for Foto DTM. Dette kunne have imødekommet det at der snarere blev lavet en DSM frem for en DTM og således havde ortofotoet ikke blevet så forvredet. 31
32 4. FASE VURDERING AF FORSKELLIGE KORTLÆGNINGSMETODER Denne fase omhandler sammenlignes af kortprodukter. Sammenligningerne laves dels indbyrdes mellem projektgruppens fem udarbejdede kortprodukter og dels i forhold til Aalborg Kommunes tekniske kort, TOP10DK, Cowis DTM fra år 2006 og DDOby. Der sammenlignes mellem forventet og reel spredning af kortprodukterne. Der foretages 12 sammenligninger ved hjælp af GeoCAD. Kapitlet består af tre afsnit. I første afsnit 4.1 Forventede spredninger for kortprodukter side 32, opstilles de forventede spredninger for hvert kortprodukt. Derefter vurderes de reelle spredninger i forhold til de forventede i afsnittet 4.2 Sammenligning af kortprodukter side 35. Endeligt konkluderes der på de udarbejdede kortprodukter i afsnit 4.3 Vurdering på 4. fase side 52. For nemmest at kunne forholde sig relativt til de udregnede spredninger i dette kapitel regnes der overalt i cm. I dette kapitel er alle spredninger i planen udregnet som planspredninger der er defineret ved [Jensen, 2005, side 174]. Hvis der ønskes omregnet til punktspredning må først gøres klart om hvorvidt der ønskes professor ved Aalborg Universitet Kai Borres definition af punktspredning eller den der i øvrigt bruges. Kai Borre definerer punktspredningen som 2 Hvorimod andre definerer punktspredningen lig med planspredningen. Her hvor planspredning og punktspredning er den samme er der således en kvadratrod to til forskel mellem koordinatspredning og punktspredningen. 4.1 FORVENTEDE SPREDNINGER FOR KORTPRODUKTER Som beskrevet ovenfor opstilles de forventede spredninger til kortprodukterne i dette afsnit. Disse spredninger vurderes i afsnittet 4.2 Sammenligning af kortprodukter side 35 i forhold til de reelle spredninger mellem kortprodukterne for at vurdere disse. Først vil de forventede plan og højdespredninger til projektgruppens kortprodukter blive opstillet i afsnit til 4.1.5, og dernæst vil spredningerne til de eksterne kortprodukter blive opstillet i afsnit Endeligt gives der i afsnit en samlet oversigt over alle de forventede spredninger. Projektgruppens fem udarbejdede kortprodukter er RTK fremstillet teknisk kort (RTK, kort) RTK fremstillet digital terrænmodel (RTK, DTM) Fotogrammetrisk fremstillet teknisk kort (Foto, kort) Fotogrammetrisk fremstillet digital terrænmodel (Foto, DTM) Ortofoto fremstillet ud fra højdemodel og orientering (Ortofoto) I de følgende afsnit vil de forventede spredninger til kortprodukterne blive beskrevet i opstillede rækkefølge. 32
33 4.1.1 FORVENTET SPREDNING VED RTK KORT Det RTK fremstillede tekniske kort skal senere sammenlignes med fem forskellige kortprodukter. Her vil der hvor det er muligt blive brugt 19 riste og brønde som kortet indeholder. Ved sammenligning med TOP10DK vil undtagelsesvist blive brugt bygninger da dette kortværk ikke indeholder dæksler og brønde. Når den forventede planspredning skal findes er det dermed den forventede planspredning på dæksler og brønde der er interessant. Denne forventes at være udelukkende afhængig af planspredningen på en RTK måling, da centreringsspredningen i denne sammenhæng er ubetydelig. Som mål for den forventede planspredning på en RTK måling bruges KMS erfaringer jf. [Jensen, 2005, s. 174]. Afstanden mellem rover og referencestation er cirka 4 km. Dermed er planspredningen 1,3, som bruges som forventet planspredning ved RTK, kort. I højden er argumentationen den samme, dog vil det RTK fremstillede tekniske kort blive sammenligning med fire forskellige kortværker i højden da der ikke kan måles højder i ortofotoet. Også her bruges KMS erfaringer hvilket medfører en forventet højdespredning på 1, FORVENTET SPREDNING VED RTK FREMSTILLET DIGITAL TERRÆNMODEL Ved en RTK fremstillet digital terrænmodel er kutymen at holde en spredning på en tredjedel af kurveintervallet. Fra studievejledningen er det et krav at kurveintervallet skal være en halv meter hvilket dermed medfører en højdespredning på FORVENTET SPREDNING FOR DET FOTOGRAMMETRISK FREMSTILLEDE TEKNISKE KORT Koordinatspredningen på et nypunkt der indmåles fotogrammetrisk er i afsnit Forventet spredning i planen side 25 udregnet til 3,7. Dette er under forudsætning af at punkterne er indmålt med stor omhyggelighed, som fx ved indmåling af paspunkter. Imidlertid er det ikke forventeligt at alle detailpunkter er indmålt med stor omhyggelighed. Derfor ganges værdien med en faktor to. Således er den forventede koordinatspredning for det fotogrammetrisk fremstillede tekniske kort 7,4. Da kortprodukterne sammenlignes i planen vha. planspredninger omregnes koordinatspredningen til en planspredning ved at gange med kvadratrod to og der fås 10,5. I højden er argumentationen endnu en gang den samme. I afsnit Forventet spredning i højden side 26 er højdespredningen udregnet til 6,2 hvilket ganges med faktor to og der fås 12, FORVENTET SPREDNING PÅ FOTOGRAMMETRISK FREMSTILLET DIGITAL TERRÆNMODEL Den fotogrammetrisk fremstillede digitale terrænmodel består af et antal punkter spredt ud over modellen i et 3 meter grid. Den forventede højdespredning udregnes på disse punkter. Der skal derfor gøres opmærksom på at der kan forekomme fejl ved generering af trekanter ud fra punkterne. Fejlens størrelse vil være afhængig af terrænet. Højdespredningen estimeres til 0,2 af flyvehøjden som beskrevet i afsnit Kravspecifikation for Foto DTM side 28. Dette giver en højdespredning på
34 4.1.5 FORVENTET SPREDNING FOR ORTOFOTO Planspredningen i ortofotoet beregnes efter Vejledning Om Ortofotos [Orto, 2004, s. 23] ved σ a b 2 c 3 σ H c σ c er kamerakonstant. Er 10,14 H er flyvehøjden. Er cirka er spredningen på højdemodellen. Udregnet i forrige afsnit til 13 σ er spredningen i billedet fra orienteringen. Denne antages at være den samme som spredningen på et nypunkt. Er tidligere i afsnit Forventet spredning i planen side 25 udregnet til 37 i billedet hvilket svarer til 6 0,0006 i billedet ved et målforhold på s er billedformatet på 10,35 q er sideoverlap i procent og sættes til ca. 20 % p er længdeoverlap og sættes til ca. 60 % Dermed kan planspredningen i ortofotoet udregnes til σ , ,35 13 cm 2 10, ,14 0,0006 5,2 cm FORVENTEDE SPREDNINGER FOR EKSTERNE KORTPRODUKTER De eksterne kortprodukter og deres plan og højdespredninger som benyttes ved sammenligningen er Aalborg Kommunes Tekniske kort i TK3 standard (Aa TK3). Nøjagtighed på 10 cm i planen og 15 cm i højden [TK99] Danmarks Topografiske Grundkortdatabase, TOP10DK, Kort og Matrikelstyrelsen (TOP10DK) har en nøjagtighed på 100 cm i planen og op til 500 cm i højden [KMS, 2001] Cowis digitale højdemodel fra år 2006, der ligger på Aalborg Universitets server under: X:\DSM\DSM_alle_S34J (COWI DTM 2006) har en plannøjagtighed på 10 cm [COWI, 2006] Danmarks Digitale Ortofoto af COWI, fra år 2005 der ligger på Aalborg Universitets server under X:\Ortofoto\Aalborg_05_UTM32Euref89 (DDO) har en plannøjagtighed på 35 cm [Jens Juhl] 34
35 4.1.7 SAMLET SPREDNING FOR KORTSAMMENLIGNING Ved sammenligning af to kortprodukter udregnes en samlet forventet spredning ved... er den forventede spredning i første kortprodukt. er den forventede spredning i andet kortprodukt De forventede spredninger som benyttes til kortsammenligningen er udregnet ved formlen ovenfor og kan ses i tabel 4.1 nedenfor. TABEL 4.1 FORVENTET SPREDNING TIL KORTSAMMENLIGNING Spredning i plan/højde RTK kort RTK DTM Foto kort Foto DTM Ortofoto Aa TK3 TOP10DK Cowi DTM 2006 RTK kort 11/ /15 100/ RTK DTM Foto kort 12 15/18 Foto DTM 16 Ortofoto 11 Tabel 4.1 viser de forventede spredninger som benyttes til kortsammenligning mellem de forskellige kortprodukter Nu er de forventede spredninger til brug ved kortsammenligningen opstillet, og sammenligningen kan nu påbegyndes. 4.2 SAMMENLIGNING AF KORTPRODUKTER I dette afsnit sammenlignes projektgruppens fem udarbejdede kortprodukter dels indbyrdes med hinanden, og dels i forhold til de eksterne kortprodukter Aalborg Kommunes Tekniske kort, TOP10DK, Cowi DTM 2006 og DDOby. Sammenligningen af kortprodukterne er foretaget i GeoCAD ved at udregne en planspredning mellem de to aktuelle kortprodukter før og efter en transformation. Planspredning kaldes i GeoCAD indpasningsspredning. De udregnede planspredning fra GeoCAD sammenlignes herefter med den forventede spredning udregnet i afsnittet 4.1 Forventede spredninger for kortprodukter side 32. De udregnede planspredninger fra GeoCAD er sammensat i et skema og vedlagt som bilag 4A Udregnede spredninger. Der laves 12 sammenligninger. Sammenligningerne bygger på veldefinerede punkter som fx dæksler og riste. Samtlige dæksler og riste på projektområdet er benyttet ved sammenligningerne 1 9, da kortprodukterne ved disse sammenligninger kun dækker over projektområdet. Dette drejer sig om ca. 15 punkter. Ved sammenligningerne 10 12, hvor kortprodukterne dækker hele modellen, benyttes der veldefinerede punkter fordelt over hele modellen. For at kunne vurdere kortprodukterne relativt benyttes der også ca. 15 punkter ved disse sammenligninger. Der er i de følgende afsnit 16 søjlediagrammer som følge af at fire sammenligninger laves i både plan og højde og otte sammenligninger laves i enten plan eller højde. For at gøre det lettere for læseren at vurdere disse tolv søjlediagrammer i forhold til hinanden, også kaldet relativt, er der videst muligt søgt samme inddeling af den DDO 35
36 lodrette akse. Søjlediagrammerne er blå hvor der er i højden. På de følgende sider beskrives og vurderes de 12 sammenligninger. sammenlignet i planen og røde hvor der er sammenlignet SAMMENLIGNING MELLEM RTK KORT OG FOTO KORT I dette afsnit sammenlignes to af projektgruppens egne produkter. Det udarbejdede RTK kort sammenlignes med det fotogrammetrisk fremstillede kort. Først sammenlignes produkterne i højden og derefter i planen. SAMMENLIGNING I HØJDEN Ved en 1D direkte sammenligning af RTK kort og det fotogrammetriske kort fås fejlvektorerne som kan ses på figur 4.1 nedenfor. Figur 4.1 viser fejlvektorer ved 1D direkte sammenligning mellemm RTK kort og det fotogrammetriske kort Ud fra figur 4.1 vurderes der ikke grundlag for en 1D translation, da fordelingen af pile som peger hhv. op og ned er nogenlunde lige. Dette er kontrolleret, og en flytning gør ikke spredningenn mindre. Den forventede spredninger og spredningen ved direkte sammenligning er illustreret på figur Højdespredning i cm 40 RTK kort foto kort Sammenligning i højden Forventet Direkte sammenligningg 18 punkte er sammenlignet, 1 grov fejl Figur 4.2 viser de tre spredninger som sammenlignes mellem RTK kort og det fotogrammetriske kort Det ses på figur 4.2 at spredningen ved direkte sammenligning ligger over den forventede. Da spredningen i højden på en RTK måling vurderes at være nøjagtig inden for nogle få cm, vurderes størstedelen af spredningen at komme fra den fotogrammetriske måling. 36
37 SAMMENLIGNING I PLANEN Ved en 2D direkte sammenligning af RTK kort og det fotogrammetriske kort fås fejlvektorerne som kan ses på figur 4.3 nedenfor. Figur 4.3 viser fejlvektorer ved 2D direkte sammenligning mellem RTK kort og det fotogrammetriske kort Ud fra figur 4.3 vurderes en translation som den passende transformations type, da størstedelen af pilene peger relativt i samme retning. Dette er kontrolleret og det viser sig at spredningen er mindst ved en drejning. Den forventede spredning, spredningen ved direkte sammenligning og spredningen efter translation er illustreret på figur 4.4. Planspredning i cm 40 RTK kort foto kort Sammenligning i planen Forventet Direkte sammenligning Efter translation 19 punkter sammenlignet, 0 grove fejl Figur 4.4 viser de tre spredninger som sammenlignes mellem RTK kort og det fotogrammetriske kort Det ses på figur 4.4 at spredningen ved direkte sammenligning ligger væsentligt over spredningen ved den direkte sammenligning. Efter translationen er spredningen som forventet. 37
38 4.2.2 SAMMENLIGNING MELLEM RTK KORT OG ORTOFOTO I PLANEN Ved en 2D direkte sammenligning af RTK kort og ortofoto fås fejlvektorerne som kan ses på figur 4.5 nedenfor. Figur 4.5 viser fejlvektorer ved 2D direkte sammenligning mellem RTK kort og ortofoto Ud fra figur 4.5 vurderes at en translation med målestoksændring vil være en passende transformationstype til sammenligning af kortprodukterne. Dette vurderes da der kan antydes to grupper af pile som relativt ikke peger i samme retning, som de fx ville gøre hvor en translation var at foretrække. Dette er kontrolleret og de andre transformationstyper gør ikke spredningen mindre. Den forventede spredning og spredningen ved direkte sammenligningen samt spredningen efter translation og målestok er illustreret på figur 4.6. Planspredning i cm 40 RTK kort ortofoto Sammenligning i planen Forventet Direkte sammenligning Efter translation og målestok 15 punkter sammenlignet, 0 grove fejl Figur 4.6 viser de tre spredninger som sammenlignes mellem RTK kort og det fotogrammetriske kort Det ses på figur 4.6 at spredningen ved den direkte sammenligning ligger lidt over den forventede. 38
39 4.2.3 SAMMENLIGNING MELLEM RTK KORT OG AK TK3 I dette afsnit sammenlignes det udarbejdede RTK kort med Aalborg Kommunes Tekniske Kort. Først sammenlignes produkterne i højden og derefter i planen. SAMMENLIGNING I HØJDEN Ved en 1D direkte sammenligning af RTK kort og Aalborg Kommunes Tekniske Kort får fejlvektorerne som kan ses på figur 4.7 nedenfor. Figur 4.7 viser fejlvektorerr ved 1D direkte sammenligning mellem RTK kort og AK TK3 Ud fra figur 4.7 vurderes at en 1D translation ville være passende, da samtlige pile peger i samme retning. Dette er kontrolleret, og spredningen efter flytningenn er mindre. Den forventede og de udregnede spredninger til sammenligningen af kortprodukterne er illustrerett på figur 4.8. Højdespredning i cm 40 RTK kort foto kort Sammenligning i højden Forventet Direkte sammenligning 9 punkter sammenlignet, 9 grove fejl 6 Efter translation Figur 4.8 viser de tre spredninger som sammenlignes mellem RTK kort og det fotogrammetriske kort Det ses på figur 4.8 at spredningen ved direkte sammenligning er som forventedee samt at spredningen bliver mindre efter en translation. 39
40 SAMMENLIGNING I PLANEN Ved en 2D direkte sammenligning af RTK kort og Aalborg Kommunes Tekniske Kort får fejlvektorerne som kan ses på figur 4.9 nedenfor. Figur 4.9 viser fejlvektorer ved 2D direkte sammenligning mellem RTK kort og AK TK3 Ud fra figur 4.9 vurderes at en translation vil være passende, da størstedelen af pilene relativt peger i samme retning. Dette er kontrolleret og de andre transformationstyper giver ikke en mindre spredning. Den forventede og de udregnede spredninger til sammenligningen af kortprodukterne er illustreret på nedenstående figur Planspredning i cm 40 RTK kort AK TK3 Sammenligning i planen Forventet Direkte sammenligning Efter translation 18 punkter sammenlignet, 0 grove fejl Figur 4.10 viser de tre spredninger som sammenlignes mellem RTK kort og det fotogrammetriske kort Det ses på figur 4.10 at den reelle spredning ved direkte sammenligning ligger over den forventede. Efter en translation er den som forventet. 40
41 4.2.4 SAMMENLIGNING MELLEM RTK KORT OG TOP10DK I dette afsnit sammenlignes det udarbejdede RTK kort med TOP10DK. Først sammenlignes produkterne i højden og derefter i planen. SAMMENLIGNING I HØJDEN Ved en 1D nedenfor. direkte sammenligning af RTK kort og TOP10DK fås fejlvektorerne som kan ses på figur 4.11 Figur 4.11 viser fejlvektorerr ved 1D direktee sammenligning mellem RTK kort og TOP10DK Ud fra figur 4.11 vurderes, at en 1D translation vil være passende, da samtlige pile peger i samme retning. Dette er kontrolleret og en translation giver også en mindre spredning. Den forventede og de udregnede spredninger til sammenligningen af kortprodukterne er illustreret på figur Bemærk at den lodrette akse her går fra 0 til 600 cm. Højdespredning i cm RTK kort KMS TOP10DK Sammenligning i højden Forventet Direkte sammenligning 11 punkter sammenlignet, 0 grove fejl 55 Efter translation Figur 4.12 viser de tre spredninger som sammenligness mellem RTK kort og TOP10DK Det ses på figur 4.12 at spredningen ved direkte sammenligning ligger under den forventede. Men vel at mærke er de begge meget høje. Efter translationen bliver spredningen bemærkelsesværdigt bedre. Det viser at TOP10DK relativt er ganske godt over dette område. 41
42 SAMMENLIGNING I PLANEN Ved en 2D direkte sammenligning af RTK kort og TOP10DK fås fejlvektorerne som kan ses på figur 4.13 nedenfor. Figur 4.13 viser fejlvektorer ved 2D direkte sammenligning mellem RTK kort og TOP10DK Ud fra figur 4.13 vurderes, at en translation vil være en passende transformationstype til sammenligning af kortprodukterne. Dette vurderes, da det kan antydes at fejlvektorerne peger i samme retning. En translation med drejning ville have givet et 4 bedre resultat men dette fravælges mod den mindre ubekendte der er i en translation frem for en translation og drejning. Den forventede spredning og spredningen ved direkte sammenligningen samt spredningen efter translation er illustreret på figur Bemærk den lodrette akse går fra 0 til 120 cm. Planspredning i cm RTK kort KMS TOP10DK Sammenligning i planen Forventet Direkte sammenligning Efter translation 8 punkter sammenlignet, 3 grove fejl 28 Figur 4.14 viser de tre spredninger som sammenlignes mellem RTK kort og TOP10DK Det ses på figur 4.14 at den aktuelle spredning ligger under den forventede. Efter en translation er spredningen mindre. 42
43 4.2.5 SAMMENLIGNING MELLEM RTK KORT OG DDOBY I PLANEN Ved en 2D direkte sammenligning mellem RTK kort og DDOby fås fejlvektorerne som kan ses på figur 4.15 nedenfor. Figur 4.15 viser fejlvektorer ved 2D direkte sammenligning mellem RTK kort og DDO Ser man på figur 4.15 og prøver at forestille sig hvilken transformations type som vil være passende til denne høstak af fejlvektorer, kan projektgruppens rutinerede øjne hurtigt konkludere at der ikke skal foretages nogen transformation. Dette er dog kontrolleret, og ingen af transformationstyperne giver et bedre resultat. Den forventede spredning og spredningen ved direkte sammenligningen er illustreret på figur Planspredning i cm 40 RTK kort DDOby Sammenligning i planen Forventet Direkte sammenligning 14 punkter sammenlignet, 0 grove fejl Figur 4.16 viser de tre spredninger som sammenlignes mellem RTK kort og DDOby Det ses på figur 4.16 at den forventede spredning ligger over den aktuelle. 43
44 4.2.6 SAMMENLIGNING MELLEM RTK DTM OG FOTO DTM Sammenligning mellem projektgruppens udarbejdede RTK DTM og den fotogrammetrisk fremstillede DTM er foretaget i GeoCAD ved at interpolere Z værdier mellem punkter og trekanter. Her er en vigtig bemærkning at sammenligningen er foretaget ved at sammenligne trekanter fra RTK DTM med punkter fra foto DTM. Dette valg kan diskuteres. Spredningen på RTK DTM er i afsnit Kontrol af RTK DTM side 9. udregnet til 10 cm. Ligeså er spredningenn på foto DTM også udregnet til 10 cm i afsnit Kontrol og vurdering af Foto DTM side 29. Ud fra denne betragtning er det trufne valg korrekt eftersom der så kan gisnes at foto DTM er ringere end RTK DTM da sidstnævnte er fremstillet af punkter målt hvor der er ændringer i terrænet. Omvendt er der væsentligt længere mellem de punkter som trekanterne er genereret ud fra i RTK DTM end der er i foto DTM hvor der kun er tre meter mellem punkterne. Ud fra denne betragtning burde sammenligningen have været lavet omvendt ved at generere trekanter ud fra foto DTM. Den forventede spredning og spredningen ved direkte sammenligningen er illustreret på figur Højdespredning i cm 40 RTK DTM Foto DTM Sammenligning i højden Forventet Direkte sammenligning 965 punkter sammenlignet, 107 grove fejl Figur 4.17 viser de to spredninger som sammenlignes mellem RTK DTM og Foto DTM Det ses på figur 4.17 at spredning er som forventet. En translation er foretaget men forbedredee ikke resultatet. 444
45 4.2.7 SAMMENLIGNING MELLEM RTK DTM OG COWI DTM 2006 Sammenligning mellem projektgruppens udarbejdede RTK DTM og Cowis DTM 2006 er foretaget ved at generere trekanter ud fra Cowis DTM og interpolere med z værdierr ud fra punkterne i RTK DTM. Dette er valgt da det formodes at Cowis DTM er bedre end RTK DTM. Den forventede spredning og spredningen ved direkte sammenligningen er illustreret på figur Højdespredning i cm RTK DTM COWI DTM Sammenligning i højden Forventet Direkte sammenligning 140 punkter sammenlignet, 8 grove fejl Figur 4.18 viser de to spredninger som sammenlignes mellem RTK DTM og Cowi DTM 2006 Det ses på figur 4.18 at spredningen ved direkte sammenligning er bedre end forventet. Der er ingen nævneværdig forbedring ved en translation. 45
46 4.2.8 SAMMENLIGNING MELLLEM FOTO KORT OG ORTOFOTO I PLANEN Ved en 2D direkte sammenligning mellem det fotogrammetriske kort og ortofotoet fås fejlvektorerne som kan ses på figur 4.19 nedenfor. Figur 4.19 viser fejlvektorer ved 2D direkte sammenligning mellem fotogrammetrisk kort og ortofoto Ud fra figur 4.19 vurderes, at en translation vil være passende transformation type, da det vurderes at størstedelen af fejlvektorerne peger i samme retning. Ved at kontrollere de andre transformationstyper viser det sig, at translation med målestoksændring giver et bedre resultat. Den forventede spredning og spredningen ved direkte sammenligningen og ved translation og målestok er illustreret på figur Planspredning i cm 40 Foto kort Ortofoto Sammenligning i planen Forventet Direkte sammenligning Efter translation og målestok 15 punkter sammenlignet, 0 grove fejl Figur 4.20 viser de tre spredninger som sammenlignes mellem fotogrammetrisk kort og ortofoto Det ses på figur 4.20 at den aktuelle spredning er over den forventede. Efter translation med målestoksændring er spredningen som forventet. 46
47 4.2.9 SAMMENLIGNING MELLEM FOTO KORT OG AK TK3 I dette afsnit sammenlignes det udarbejdede fotogrammetriske kort med Aalborg Kommunes Tekniske kort. Først sammenlignes produkterne i højden og derefter i planen. SAMMENLIGNING I HØJDEN Ved 1D direkte sammenligning mellem det fotogrammetriske kort og Aalborg Kommunes Tekniske kort fås fejlvektorerne som kan ses på figur 4.21 nedenfor. Figur 4.21 viser fejlvektorer ved 1D direkte sammenligning mellem fotogrammetrisk kort og AK TK3 Ud fra figur 4.21 vurderes at der ikke skal foretages nogen translation, da fordelingen af pile som peger hhv. op og ned af næsten er lige og derfor vil en translation ikke nedbringe spredningen. Dette er kontrolleret, og en translationn giver som vurderet ikke et bedre resultat. Den forventede spredning og spredningenn ved direkte sammenligningen og efter translation er illustreret på figur Højdespredning i cm Foto kort AK TK3 Sammenligning i højden Forventet Direkte sammenligning 7 punkter sammenlignet, 10 grove fejl Figur 4.22 viser de tre spredninger som sammenlignes mellem fotogrammetrisk kort og AK TK3 Det ses på figur 4.22 at spredningen ved direkte sammenligning ligger over den forventede. En translation forbedrer ikke resultatet. 47
48 SAMMENLIGNING I PLANEN Ved 2D direkte sammenligning mellem det fotogrammetriske kort og Aalborg Kommunes Tekniske Kort fås fejlvektorerne som kan ses på figur 4.23 nedenfor. Figur 4.23 viser fejlvektorer ved 2D direkte sammenligning mellem fotogrammetrisk kort og AK TK3 Ud fra figur 4.23 vurderes, at en translation vil være passende transformation type, da størstedelen af fejlvektorerne peger relativt i samme retning. Ved kontrol af de andre transformationstyper, viser det sig, at translation med drejning giver et bedre resultat. Den forventede spredning og spredningen ved direkte sammenligning samt spredningen efter translation og drejning er illustreret på figur Planspredning i cm Foto kort AK TK3 Sammenligning i planen Forventet Direkte sammenligning Efter translation og drejning 15 punkter sammenlignet, 2 grove fejl Figur 4.24 viser de tre spredninger som sammenlignes mellem fotogrammetrisk kort og AK TK3 Det ses på figur 4.24 at spredningen ved direkte sammenligning ligger over den forventede. Efter translation med drejning er spredningen bedre end forventet. 48
49 SAMMENLIGNING MELLEM FOTOGRAMMETRISK DTM OG COWI DTM Sammenligningen mellemm projektgruppens udarbejdede fotogrammetriske DTM og Cowis DTM 2006 er foretaget ved at generere trekanter ud fra Cowis DTM og interpolere z værdier til disse trekanter fra punkterne i foto DTM. Dette er valgt da det formodes at Cowis DTM er bedre end foto DTM. Cowi opgiver spredningen til 10 cm i deres DTM. Fotoo DTM er dog også kontrolleret og der er udregnet en spredning på 10 cm. Men denne spredning er kun foretaget på baggrund af 21 punkter som beskrevet i afsnit Kontrol og vurdering af Foto DTM side 29. Derfor formodes Cowis DTM at være bedre og derfor er der genereret trekanter ud fra denne og interpoleret z værdier til foto DTM. Den forventede spredning og spredningen ved direkte sammenligningen af kortprodukterne er illustreret på figur Højdespredning i cm 40 Foto DTM COWI DTM Sammenligning i højden Forventet Direkte sammenligning punkter sammenlignet, 1511 grove fejl Figur 4.25 viser de to spredninger som sammenlignes mellem den fotogrammetriske DTM og Cowi DTM 2006 Det ses på figur 4.25 at spredningen ved direkte sammenligning er som forventet. 49
50 SAMMENLIGNING MELLEM ORTOFOTO OG AK TK3 I PLANEN Ved en 2D direkte sammenligning, mellem projektgruppens udarbejdede ortofoto og Aalborg Kommunes Tekniske Kort, fås fejlvektorerne som ses på figur 4.26 nedenfor. Figur 4.26 viser fejlvektorer ved 2D direkte sammenligning mellem ortofoto og AK TK3 Ud fra figur 4.26 vurderes, at en translation med målestoksændring vil være passende, da samtlige pile vurderes at pege mod samme punkt. Ved kontrol med de andre transformationstyper viser det sig at en Helmert transformation giver et bedre resultat. Den forventede spredning, spredningen ved direkte sammenligning og spredningen efter en Helmert transformation er illustreret på figur Planspredning i cm 40 Ortofoto AK TK3 Sammenligning i planen Forventet Direkte sammenligning Efter Helmert 16 punkter sammenlignet, 0 grove fejl Figur 4.27 viser de tre spredninger som sammenlignes mellem ortofotoet og AK TK3 Det ses på figur 4.27 at spredningen ved direkte sammenligning ligger over den forventede. Efter en Helmert transformation er spredningen som forventet. 50
51 SAMMENLIGNING MELLEM ORTOFOTO OG DDOBY I PLANEN Ved 2D direkte sammenligning, mellem projektgruppens udarbejdede ortofoto og DDOby, fås fejlvektorerne som kan ses på figur 4.28 nedenfor. Figur 4.28 viser fejlvektorer ved 2D direkte sammenligning mellem ortofoto og DDOby Ud fra figur 4.28 vurderes at en translation med målestoksændring er passende transformationstype. Dette vurderes, da det kan antydes at størstedelen af pilene peger mod samme punkt, hvilket tyder på en målestoksændring. Dette er kontrolleret, og de andre transformationstyper giver ikke en mindre spredning. Den forventede spredning, spredningen ved direkte sammenligning og spredningen efter translation med målestok er vist på figur 4.29 Planspredning i cm 40 Ortofoto DDO Sammenligning i planen Forventet Direkte sammenligning Efter translation og målestok 12 punkter sammenlignet, 0 grove fejl 10 Figur 4.29 viser de tre spredninger som sammenlignes mellem ortofotoet og DDOby Det ses på figur 4.29 at spredningen ved direkte sammenligning og efter transformation er bedre end forventet. De 12 kortsammenligninger er nu beskrevet, og der konkluderes herefter på 4. Fase. 51
52 4.3 VURDERING PÅ 4. FASE I dette afsnit vil der forsøges at drage nogle konklusioner om de fem udarbejdede kortprodukter på baggrund af sammenligninger fra forrige afsnit. Først vurderes sammenligningerne af kortene og derefter højdemodellerne. Det skal bemærkes, at der i statistisk sammenhæng er benyttet meget få punkter, mellem 10 og 20, ved alle sammenligninger i planen. Heraf er de grove fejl frasorteret. Hvis grovfejlsgrænsen blev sat tilpas langt ned kunne der jo fås den spredning der ønskes VURDERING AF RTK KORT Det tekniske kort fremstillet ved RTK måling er kontrolleret i kapitel 1 vha. bygningsdimensioner. Her blev fundet en spredning på 1,8. Ved sammenligningerne med RTK kortet i fjerde fase blev der brugt riste og brønde som er mere veldefinerede end bygninger og der kan dermed forventes en spredning på under 1,8. Det er dog vigtigst at bemærke, at spredningen på RTK kortet er relativt lav i forhold til spredningen ved de andre produkter. Den forventede spredning er cirka VURDERING AF FOTO KORT Det fotogrammetrisk fremstillede tekniske kort har en forventet spredning på 12, og er i planen sammenlignet med tre andre kortværker. Dette drejer sig om RTK kortet, ortofotoet og AK TK3. I højden er Foto kortet sammenlignet med RTK kort og AK TK3. Ved sammenligning i højden med RTK kort og AK TK3 fås begge gange en spredning på cirka 36 cm og i ingen af tilfældene forbedrer en 1D translation resultatet. Dette kan være tilfældigt men der også gættes på at spredningerne netop skyldes foto kortet, og at der dermed er en spredning på minimum 30 cm i dette kort? Den forventede spredning for fotokortet blev udregnet til 12 og i forhold hertil er det under de givne forudsætninger 2,5 gang så ringe. Dette vurderes nemt at skyldes manglende erfaring ved fotogrammetrisk måling. I planen er der en spredning på 37 ved sammenligning med RTK kortet. Efter en translation bliver spredningen cirka 13. Samme billede gør sig gældende ved AK TK3. En spredning ved direkte sammenligning på 31 og efter en passende transformation fås en spredning på 8. Dette peger i retning af en systematisk fejl i foto kortet, hvilket bekræftes ved sammenligning med ortofotoet. Her er spredningen ved direkte sammenligning på 24 og dermed mindre hvilket kan skyldes en fejl i orienteringen da både foto kortet og ortofoto er fremstillet på baggrund af samme orientering VURDERING AF ORTOFOTO Ortofotoet er sammenlignet med RTK kortet, Foto kortet, AK TK3 og DDOby. Den forventede spredning er cirka 5. Ved sammenligning med RTK kortet er der ved direkte sammenligning en spredning på cirka 8. Efter en transformation er spredningen på cirka 5 hvilket kunne indikere en systematisk fejl. Dette bekræftes af at en målestoksændring hjælpe ganske betragteligt ved sammenligning med AK TK3 og DDOby. Således er der god sandsynlighed for at ortofotoet er forvredet som følge af forkert DTM. 52
53 4.3.4 VURDERING AF RTK DTM Den RTK fremstillede DTM er sammenlignet med to andre kortprodukter foto DTM og Cowis DTM. Ved sammenligning med foto DTM fås en spredning på cirka 19 og ved sammenligning med Cowis DTM en spredning på 8. Ingen af sammenligningerne forbedres ved en translation. Der er frasorteret cirka 10 % grove fejl ved foto DTM og 5 % grove fejl ved Cowi DTM. Vigtigt er også at RTK DTM er brugt som trekanter ved sammenligning med Foto DTM og som punkter ved sammenligning med Cowi DTM. Spredningerne er en indikation af at RTK DTM passer relativt godt. Der opnås en stor spredning ved sammenligning med foto DTM men dette skyldes sandsynligvis unøjagtigheder i foto DTM. Det er vigtigt at bemærke at ved fremstillingen af RTK DTM er brugt alle detailpunkter omkring husene i det opmålte område. Dette skulle gerne medføre en præcis DTM omkring husene da der her er indmålt mange punkter til bestemmelse af hushjørner. Derfor virker det ganske sandsynligt med en spredning på de cirka 8 cm ved sammenligning med Cowi et ganske flot resultat VURDERING AF FOTO DTM Den fotogrammetrisk fremstillede digitale terrænmodel er sammenlignet med RTK DTM i området og med Cowi DTM over hele området. Ved RTK DTM er der en spredning på cirka 19 og ved Cowi DTM en spredning på 13. En del af grunden til den lave spredning ved sammenligning med Cowis er frasorteringen af cirka 13 % af observationerne. Ses der på hvor disse frasorterede punkter er det ganske som ventet ved alle husene. Her har Cowi så fint sorteret punkter væk hvorimod der i foto DTM er en masse punkter ovenpå hustagene. Den lidt højere spredning ved sammenligning med RTK DTM kunne skyldes nøjagtigheden omkring husene. Som før omtalt er der mange punkter i RTK DTM her og foto DTM kan ikke gå ligeså fint ned omkring husene med et grid på 3. 53
54 LITTERATURLISTE [Cederholm 2000] Udjævning 2000, 2. Udgave af Peter Cederholm [Cederholm 2006] GPS måling af utilgængelige detailpunkter 2006, af Peter Cederholm og Karsten Jensen. [Cederholm 2007] Slides fra kursusgang 8 i udjævningskurset, at Peter Cederholm ved Aalborg Universitet [COWI, 2006] COWI når nye højder, 2006, DDH Danmarks Digitale Højdemodel dokumenterer højderne i Danmark 72CC 497A B1B8 B42F0B0DBC9E/0/ DDH_brochure_LO1006.pdf Hentet 1. december 2007 [Jensen, 2005] Landmåling i Teori og Praksis af Karsten Jensen, Laboratoriet for Geoinformatik, Institut for Samfundsudvikling og Planlægning, Aalborg Universitet, 2. udgave august 2005, ISBN [Jensen, 2007] Tillæg til Landmåling i Teori og Praksis af Karsten Jensen, Laboratoriet for Geoinformatik, Institut for Samfundsudvikling og Planlægning, Aalborg Universitet, 2007 [Jens Juhl] Lic. Geom ved Aalborg Universitet, semesterkoordinater på 5. semester på Landinspektøruddannelsen [KMS, 2001] Kort og Matrikelstyrelsen, 2001, TOP10DK Geometrisk registrering, specifikation udgave Hentet 1. december 2007 [orto, 2004] Vejledning om ortofotos, 1. udgave, november 2004, en arbejdsgruppe under Geoforum Danmark. (Geoforums hjemmeside under ressourcer > ortofotorapport). Hentet 1. december 2007 [TK99] Specifikationer for tekniske kort, Et udvalg under kommunalteknisk chefforening, 2. udgave, februar pdf Hentet 1. december 2007 [Udjævning 10] Slide af Jens Juhl fra 10. Kursusgang den 5 November 2007, i kurset Udjævning ved landinspektøruddannelsens 5 semester. 58
55 Bilag 1B - oversigt over opmålingsfiler Målte punkter Fil Fra Til Andet Hvad er målt? txt Forside på vestlig bygning txt Forside på vestlig bygning txt : Forside på vestlig bygning : Bagside vestlig bygning txt - - G.I G.I. punkter 1. gang : Bagside bygning øst : Bygning øst forside : Stisystem txt G.I G.I. punkter 2. gang Detailopmåling txt Detailpunkter fladenivellement txt Supplerende detailmåling Kontrolmåling af terrænmodel 999 Skelrør MV 1. gang txt Kontrolpunkter til Aalborg reference 1. gang Supplerende detailmåling MV 2. gang txt Kontrolpunkter til Støvring reference 1. gang txt Kontrolpunkter til Aalborg reference 2. gang
56 Målte punkter Fil Fra Til Andet txt Nogle bygninger Hjælpepunkter 1. gang Paspunkter 1. gang Hvad er målt? txt Kontrolpunkter til Støvring reference 2. gang txt Hjælpepunkter 2. gang Paspunkter 2. gang gr01skelogveje.csv Afsætning af skel og veje med Trimble csv 1 47 Kontrolopmåling af skel og veje med Trimble GPS gsi Frie opstillinger - til brug for udjævning af hjælpepunker i LGO
57 Revision Bygherre A B C D Dato Initialer Sag Målforhold Emne Tegningsnr. Sagsnr. Firma AAU
58 Bilag 1D - Kontrol af bygningsdimensioner Afstand nr Afstand målt Sorteret fra Diff tastede med stålbånd i GeoCAD tal sorteret kvadreret Bygning vest Hjørne Hjørne Hjørne Hjørne Hjørne Hjørne Hjørne Hjørne
59 Afstand nr Afstand målt Sorteret fra Diff tastede med stålbånd i GeoCAD tal sorteret Bygning vest Garage Garage Garage Garage Garage
60 Afstand nr Afstand målt Sorteret fra Diff tastede med stålbånd i GeoCAD tal sorteret Østlig bygning Hjørne Hjørne Hjørne Hjørne Hjørne Hjørne kvadreret lang afstand sum antal spredning lang afstand i alt 118 dimensioner målt sum kasseret antal Middelværdi -2.4
61 Antal afvigelser inden for interval Interval antal -45 ; ; ; ; ; ; ; ; ; Figur kontrol af bygningsdimensioner -45 ; ; ; ; -5-5 ; 5 5 ; ; ; ; 45 Afvigelsesintervaller i mm
62 Revision Bygherre A B C D Dato Initialer Sag Målforhold Emne Tegningsnr. Sagsnr. Firma AAU
63 Bilag 1F - Spredning på DTM Beregning af spredninger mm. på grundlag af MULTI-FIND punkter (kort tekst3): Antal værdier i beregningen: Maximum værdi (abs) før udvægtning: Antal værdier udvægtet: Minimum værdi: Maximum værdi: Middel af værdier: Translation (middel tal) af værdier:.000 Spredning på værdier: Beregning af spredninger mm. på grundlag af MULTI-FIND punkter (kort tekst3) reduceret med middel tal: Antal værdier i beregningen: Maximum værdi (abs) før udvægtning: Antal værdier udvægtet: Minimum værdi: Maximum værdi: Translation (middel tal) af værdier:.039 Spredning på værdier:
64 Bilag 1G - Translation ************************************************************************************* 2D TRANSFORMATION trans2d version mattrans version translationer :49:41 ************************************************************************************* FÆLLESPUNKTER Fællespunkter i FRA system: (d:\matlab\matlab\gi middelopmåling_ fra.txt) x [m] y [m] Fællespunkter i TIL system: (d:\matlab\matlab\gi_til.txt) x [m] y [m] TRANSFORMATIONSPARAMETRE tx : m ty : m sigma 0 : m TRANSFORMATIONSFORMLER xtil xfra tx = + ytil yfra ty TRANSFORMEREDE FÆLLESPUNKTER (TIL system) x [m] Res [m] Spred [m] y [m] Res [m] Spred [m]
65
66 Bilag 1H - Translation - rotation ************************************************************************************* 2D TRANSFORMATION trans2d version mattrans version translationer, 1 rotation :53:28 ************************************************************************************* FÆLLESPUNKTER Fællespunkter i FRA system: (d:\matlab\matlab\gi middelopmåling_ fra.txt) x [m] y [m] Fællespunkter i TIL system: (d:\matlab\matlab\gi_til.txt) x [m] y [m] TRANSFORMATIONSPARAMETRE a : b : tx : m ty : m rot : gon (afledt af a,b) sigma 0 : m TRANSFORMATIONSFORMLER xtil a -b xfra tx = * + ytil b a yfra ty
67 TRANSFORMEREDE FÆLLESPUNKTER (TIL system) x [m] Res [m] Spred [m] y [m] Res [m] Spred [m]
68 Bilag 1I - Translation skala ************************************************************************************* 2D TRANSFORMATION trans2d version mattrans version translationer, 1 skala :53:33 ************************************************************************************* FÆLLESPUNKTER Fællespunkter i FRA system: (d:\matlab\matlab\gi middelopmåling_ fra.txt) x [m] y [m] Fællespunkter i TIL system: (d:\matlab\matlab\gi_til.txt) x [m] y [m] TRANSFORMATIONSPARAMETRE tx : m ty : m skala : sigma 0 : m TRANSFORMATIONSFORMLER xtil xfra tx = skala * + ytil yfra ty
69 TRANSFORMEREDE FÆLLESPUNKTER (TIL system) x [m] Res [m] Spred [m] y [m] Res [m] Spred [m]
70 Bilag 1J - Helmerttransformation.txt ************************************************************************************* 2D TRANSFORMATION trans2d version mattrans version translationer, 1 rotation, 1 skala (Helmert) :53:03 ************************************************************************************* FÆLLESPUNKTER Fællespunkter i FRA system: (d:\matlab\matlab\gi middelopmåling_ fra.txt) x [m] y [m] Fællespunkter i TIL system: (d:\matlab\matlab\gi_til.txt) x [m] y [m] TRANSFORMATIONSPARAMETRE a : b : tx : m ty : m rot : gon (afledt af a,b) skala : (afledt af a,b) sigma 0 : m TRANSFORMATIONSFORMLER xtil a -b xfra tx = * + ytil b a yfra ty
71 TRANSFORMEREDE FÆLLESPUNKTER (TIL system) x [m] Res [m] Spred [m] y [m] Res [m] Spred [m]
72 Bilag 1K - kontrolpunkter Alt er opmålt i KP2000J og DVR90 1. gang til Aalborg Referencen txt Middel af 1. og 2. opmåling til Aalborg referencen Punkt nr. Easting Northing Højde Punkt nr. Easting Northing Højde gang til Aalborg Referencen txt Afvigelse af middel af Aalborg og Støvring Punkt nr. Easting Northing Højde Punkt nr. Easting Northing Højde
73 1. gang til Støvring Referencen txt Middel af 1. og 2. opmåling til Støvring referencen Punkt nr. Easting Northing Højde Punkt nr. Easting Northing Højde gang til Støvring Referencen txt Punkt nr. Easting Northing Højde
74 Afvigelse af 1. måling til Aalborg i forhold til middel af Aalborg Punkt nr. Easting Northing Højde e^2 n^2 h^ spredning Afvigelse af 2. måling til Aalborg i forhold til middel af Aalborg Punkt nr. Easting Northing Højde e^2 n^2 h^ spredning 3 3 6
75 Afvigelse af 1. måling til Støvring i forhold til middel af Støvring Punkt nr. Easting Northing Højde e^2 n^2 h^ spredning Afvigelse af 2. måling til Støvring i forhold til middel af Støvring Punkt nr. Easting Northing Højde e^2 n^2 h^ spredning
76 Bilag 2A - Koordinatdifferencer skel og veje Punktnummer Afsætningsfil Opmålingsfil Koordinatdifferens i mm kvadreret slettes
77 Punktnummer Opmålingsfil Afsætningsfil Koordinatdifferens i mm kvadreret Sum 1180 Gennemsnitlig af vigelse 26 Antal observationer 46 Kvadratsum dividret n 1344 spredning 37
78 Bilag 2B - Udjaevning %Udjævning af geometrisk nivellement %clc format short %Der er nivelleret mellem højdefikspunkterne 78, 64, 39 og 38 samt mellem %hjælpepunkterne til bygningsafsætningen 400, 401, 402 og 403 %Designmatricen A opstilles på baggrund af observationslignigerne %x= [ ] Elementvektor indeholdende h til pkt A = [ % 1. Fra 78 til % 2. Fra 400 til % 3. Fra 401 til % 4. Fra 402 til % 5. Fra 403 til % 6. Fra 64 til % 7. Fra 39 til % 8. Fra 38 til % 9. Fra 39 til %10. Fra 64 til %11. Fra 403 til %12. Fra 402 til %13. Fra 401 til %14. Fra 400 til %15. Kote til %16. Kote til %17. Kote til ]; %18. Kote til 38 %B matricen (observationsvektor) opskrives indeholdene højdeforskellene %mellem punkterne b = [ % 1. Tilbage til 78 frem til % 2. Tilbage til 400 frem til % 3. Tilbage til 401 frem til % 4. Tilbage til 402 frem til % 5. Tilbage til 403 frem til % 6. Tilbage til 64 frem til % 7. Tilbage til 39 frem til 38 sidste på vej ud fra % 8. Tilbage til 38 frem til 39 første på vej til % 9. Tilbage til 39 frem til %10. Tilbage til 64 frem til %11. Tilbage til 403 frem til %12. Tilbage til 402 frem til %13. Tilbage til 401 frem til %14. Tilbage til 400 frem til %15. Kote til %16. Kote til %17. Kote til ]; %18. Kote til 38
79 %Observationerne skal vægtes efter hvorlangt der er mellem de målte punkter: % Afstandene fra 78 til 38 og tilbage til 78 afstande = [ ]; s_k=0.003; % kilometerspredning i meter per kilometer. Sættes til 3 pga. tillæg til landmåling i teori og praksis s_o = s_k*(afstande.^0.5); % spredning på observationer side 64 i udjævningsbog s_f = [ ]; % Spredning på højdefikspunkter = [ ] ved fri %s_f = [ ]; % Spredning på højdefikspunkter = [ ] ved fastholdt varians = [s_o.^2 s_f.^2]; varians_inverteret=varians.^-1; f=diag(varians_inverteret); vf_pri=1; % Variansfaktor som a priori sættes lig 1 C = vf_pri*(f); % Vægtmatrice X = ((A'*C*A)^-1)*A'*C*b %normalligning løses r = A*X-b; % residualer vf_post=(r'*c*r)/(18-7) % variansfaktor a posteriori observationer og 4+3 ubekendte ved fri udjævning %vf_post=(r'*c*r)/(18-4) % variansfaktor a posteriori observationer og 4 ubekendt ved fastholdt %Noraliserede residualer sigma_r=vf_post*((c^-1)-a*((a'*c*a)^-1)*a'); ; %Kovariansmatrix for residualer n_res=[r./ (diag(sigma_r).^0.5)] %Normaliserde residualer. Punktum efter r gør at den tager hvert element
80 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\1.html Page 1 of Network Adjustment (c) Grontmij Licensed to Leica Geosystems AG Created: 11/08/ :57:55 Project Information Project name: Fri GPS Date created: 11/08/ :42:41 Time zone: 1h 00' Coordinate system name: KP2000J DVR90 Application software: LEICA Geo Office 5.0 Processing kernel: MOVE3 3.4 General Information Adjustment Type: Inner constrained Dimension: 3D Coordinate system: WGS 1984 Height mode: Ellipsoidal Number of iterations: 0 Maximum coord correction in last iteration: m (tolerance is met) Stations Number of (partly) known stations: 0 Number of unknown stations: 5 Total: 5 Observations GPS coordinate differences: 24 (8 baselines) Inner constraints: 3 Total: 27 Unknowns Coordinates: 15 Total: 15 Degrees of freedom: 12 Testing Alfa (multi dimensional): Alfa 0 (one dimensional): 5.0 % Beta: 80.0 % Sigma a-priori (GPS): 0.8 Critical value W-test: 1.96 Critical value T-test (2-dimensional): 2.42 Critical value T-test (3-dimensional): 1.89 Critical value F-test: 1.12 F-test: 0.97 (accepted)
81 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\1.html Page 2 of Results based on a-posteriori variance factor Input data Approximate Coordinates Station Latitude Longitude Height [m] ' " N 9 56' " E ' " N 9 56' " E ' " N 9 57' " E ' " N 9 57' " E RTCM-Ref ' " N 9 55' " E Observations Station Target St. ih Tg. ih Reading DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m Standard deviations Station Target Sd. abs / Cor Sd. rel / Cor Sd. tot / Cor DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m
82 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\1.html Page 3 of DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m Adjustment Results Coordinates Station Coordinate Corr Sd 400 Latitude 57 00' " N m m Longitude 9 56' " E m m Height m m m 401 Latitude 57 00' " N m m Longitude 9 56' " E m m Height m m m 402 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 403 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m RTCM-Ref 0112 Latitude 57 02' " N m m Longitude 9 55' " E m m Height m m m Observations and Residuals Station Target Adj obs Resid Resid (ENH) Sd DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m
83 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\1.html Page 4 of GPS Baseline Vector Residuals Station Target Adj vector [m] Resid [m] Resid [ppm] DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref Absolute Error Ellipses (2D % 1D %) Station A [m] B [m] A/B Phi Sd Hgt [m] RTCM-Ref Testing and Estimated Errors Observation Tests Station Target MDB Red BNR W-Test T-Test DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m
84 Fri GPS m m m Estimated Navigated SPP Measured Average Reference Adjusted Control - 1D Control - 2D Control - 3D 11/08/ :00:33
85 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 1 of Network Adjustment (c) Grontmij Licensed to Leica Geosystems AG Created: 11/20/ :02:02 Project Information Project name: Fri terrestisk Date created: 11/08/ :04:44 Time zone: 1h 00' Coordinate system name: KP2000J DVR90 Application software: LEICA Geo Office 5.0 Processing kernel: MOVE3 3.4 General Information Adjustment Type: Inner constrained Dimension: 3D Coordinate system: WGS 1984 Height mode: Ellipsoidal Number of iterations: 1 Maximum coord correction in last iteration: m (tolerance is met) Stations Number of (partly) known stations: 0 Number of unknown stations: 9 Total: 9 Observations Directions: 19 Distances: 19 Zenith angles: 19 Inner constraints: 6 Total: 63 Unknowns Coordinates: 27 Orientations: 5 Additional parameters: 2 Total: 34 Degrees of freedom: 29 Testing Alfa (multi dimensional): Alfa 0 (one dimensional): 5.0 % Beta: 80.0 % Sigma a-priori (GPS): 0.4 Critical value W-test: 1.96
86 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 2 of Critical value T-test (2-dimensional): 2.42 Critical value T-test (3-dimensional): 1.89 Critical value F-test: 0.99 F-test: 0.17 (accepted) Results based on a-posteriori variance factor Input data Approximate Coordinates Station Latitude Longitude Height [m] ' " N 9 57' " E ' " N 9 57' " E ' " N 9 57' " E ' " N 9 57' " E ' " N 9 56' " E ' " N 9 56' " E ' " N 9 57' " E ' " N 9 57' " E ' " N 9 56' " E Additional Parameters Value Sd Scale factor S0: fixed Vertical refraction coefficient 0.00 Z0: fixed Observations Station Target St. ih Tg. ih Reading R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m
87 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 3 of Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon Standard deviations Station Target Sd. abs / Cor Sd. rel / Cor Sd. tot / Cor R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon
88 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 4 of R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon Adjustment Results Coordinates Station Coordinate Corr Sd 1 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 2 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 3 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 4 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 400 Latitude 57 00' " N m m Longitude 9 56' " E m m Height m m m 401 Latitude 57 00' " N m m Longitude 9 56' " E m m Height m m m 402 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 403 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 5 Latitude 57 00' " N m m Longitude 9 56' " E m m Height m m m
89 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 5 of Observations and Residuals Station Target Adj obs Resid Resid (ENH) Sd R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon
90 Page 6 of 7 Absolute Error Ellipses (2D % 1D %) Station A [m] B [m] A/B Phi Sd Hgt [m] Testing and Estimated Errors Observation Tests Station Target MDB Red BNR W-Test R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m T- Test file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html
91 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 7 of Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon Processing Errors and Warnings Warning: Warning: Only 6 known coordinate(s) All scale factors fixed for free network
92 Fri terrestisk m m m Estimated Navigated SPP Measured Average Reference Adjusted Control - 1D Control - 2D Control - 3D 11/21/ :46:37
93 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 1 of Network Adjustment (c) Grontmij Licensed to Leica Geosystems AG Created: 12/05/ :11:30 Project Information Project name: Fri samlet Date created: 11/08/ :39:40 Time zone: 1h 00' Coordinate system name: KP2000J DVR90 Application software: LEICA Geo Office 5.0 Processing kernel: MOVE3 3.4 General Information Adjustment Type: Inner constrained Dimension: 3D Coordinate system: WGS 1984 Height mode: Ellipsoidal Number of iterations: 0 Maximum coord correction in last iteration: m (tolerance is met) Stations Number of (partly) known stations: 0 Number of unknown stations: 10 Total: 10 Observations Directions: 19 Distances: 19 Zenith angles: 19 GPS coordinate differences: 24 (8 baselines) Inner constraints: 3 Total: 84 Unknowns Coordinates: 30 Orientations: 5 Additional parameters: 2 Total: 37 Degrees of freedom: 47 Testing Alfa (multi dimensional): Alfa 0 (one dimensional): 5.0 % Beta: 80.0 % Sigma a-priori (GPS): 1.0
94 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 2 of Critical value W-test: 1.96 Critical value T-test (2-dimensional): 2.42 Critical value T-test (3-dimensional): 1.89 Critical value F-test: 0.96 F-test: 0.33 (accepted) Results based on a-posteriori variance factor Input data Approximate Coordinates Station Latitude Longitude Height [m] ' " N 9 57' " E ' " N 9 57' " E ' " N 9 57' " E ' " N 9 57' " E ' " N 9 56' " E ' " N 9 56' " E ' " N 9 57' " E ' " N 9 57' " E ' " N 9 56' " E RTCM-Ref ' " N 9 55' " E Additional Parameters Value Sd Scale factor S0: fixed Vertical refraction coefficient 0.00 Z0: fixed Observations Station Target St. ih Tg. ih Reading R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m
95 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 3 of Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon R m m gon S m Z gon DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m Standard deviations Station Target Sd. abs / Cor Sd. rel / Cor Sd. tot / Cor R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon
96 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 4 of R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon R gon gon.km gon S m 2.0 ppm m Z gon gon.km gon DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m -
97 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 5 of DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m DX RTCM-Ref m - - DY m - DZ m Adjustment Results Coordinates Station Coordinate Corr Sd 1 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 2 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 3 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 4 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 400 Latitude 57 00' " N m m Longitude 9 56' " E m m Height m m m 401 Latitude 57 00' " N m m Longitude 9 56' " E m m Height m m m 402 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 403 Latitude 57 00' " N m m Longitude 9 57' " E m m Height m m m 5 Latitude 57 00' " N m m Longitude 9 56' " E m m Height m m m RTCM-Ref 0112 Latitude 57 02' " N m m Longitude 9 55' " E m m Height m m m Observations and Residuals Station Target Adj obs Resid Resid (ENH) Sd R gon gon gon S m m m Z gon gon gon
98 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 6 of R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon R gon gon gon S m m m Z gon gon gon DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m
99 file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html Page 7 of DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m DX RTCM-Ref m m m m DY m m m m DZ m m m m GPS Baseline Vector Residuals Station Target Adj vector [m] Resid [m] Resid [ppm] DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref DV RTCM-Ref Absolute Error Ellipses (2D % 1D %) Station A [m] B [m] A/B Phi Sd Hgt [m] RTCM-Ref Testing and Estimated Errors Observation Tests Station Target MDB Red BNR W-Test T-Test R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon
100 Page 8 of 9 R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon R gon S m Z gon DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html
101 Page 9 of 9 DY m DZ m DX RTCM-Ref m DY m DZ m DX RTCM-Ref m DY m DZ m Processing Errors and Warnings Warning: All scale factors fixed for free network file://c:\documents and Settings\Ejnar Flensborg\Local Settings\Temp\~Rpt\0.html
102 Fri samlet m m m Estimated Navigated SPP Measured Average Reference Adjusted Control - 1D Control - 2D Control - 3D 12/05/ :11:20
103 Bilag 2F - Stakeoutlog TPS1100 Prog. Afs tning V 2.05 Instrument : TCR1105, Seriel , TCR1105 Reg. fil : GSI Program Start : 12/11/2007 at 09:16:05 Stat.Nr. : 10 Y= m X= m Z= m Ih= 0.000m Punkt nr. : 100 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= m dn= m Punkt nr. : 100 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= 0.974m dn= m Punkt nr. : 101 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= 2.148m dn= m Punkt nr. : 101 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= m dn= 1.682m Punkt nr. : 102 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= 0.000m dn= 1.070m Punkt nr. : 102 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= m dn= 0.000m Punkt nr. : 103 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= m dn= 0.000m Punkt nr. : 103 Design : Y= m X= m Afsat : Y= m X= m
104 Diff. : de= 0.000m dn= m TPS1100 Prog. Afs tning V 2.05 Instrument : TCR1105, Seriel , TCR1105 Reg. fil : GSI Program Start : 12/11/2007 at 11:37:13 Stat.Nr. : 11 Y= m X= m Z= m Ih= 0.000m Punkt nr. : 110 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= m dn= m Punkt nr. : 120 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= 0.973m dn= m Punkt nr. : 111 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= 2.144m dn= 0.001m Punkt nr. : 121 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= 0.001m dn= 1.684m Punkt nr. : 112 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= 0.000m dn= 1.069m Punkt nr. : 122 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= m dn= 0.001m Punkt nr. : 113 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= m dn= 0.000m Punkt nr. : 123 Design : Y= m X= m Afsat : Y= m X= m Diff. : de= m dn= m
105 Bilag 2H - Bygningsafsætningshøjder KOORDINATER Punkt Objektkode Liniekode E-Lokal-m N-Lokal-m H-DVR90-m Tekst Editer. Editer Editer. Editer Editer. Editer Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail Detail. Detail.
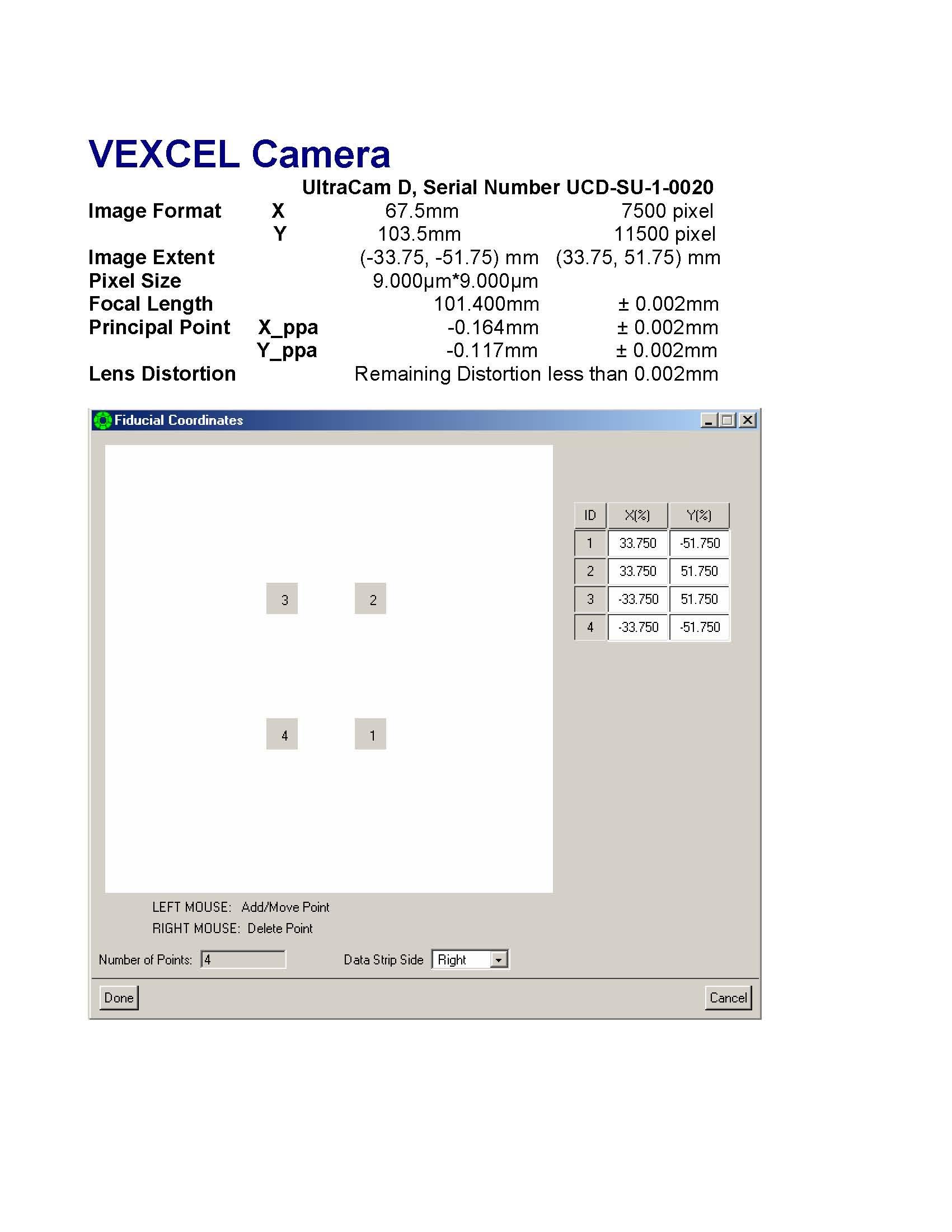
106 Bilag 3A - Kamerakalibreringsrapport
107 Bilag 3B - Ydre orienteringsrapport Model Report Project ID: GR01projekt Date/Time: 11/22/2007 2:34:55 PM Linear Units: meters Angular Units: grads Model ID: ~98+~99 Left Photo: 98 Strip: Right Photo: 99 Strip: Refinements: Atmospheric flag: off Earth curvature flag: off Left lens: off Right Lens: off Relative Orientation Report Left Photo Right Photo X0: millimeters Y0: millimeters Z0: millimeters Omega: grads Phi: grads Kappa: grads Pt ID Left Photo Right Photo SVx(um) SVy(um) SVx(um) SVy(um) PY(um) r * No. Iterations : 3 DOF : 5 Sigma : (um) Sum of red.: * = Maximum Residual Vector, W = Withheld Point
108 Absolute Orientation Report Left Photo Right Photo X0: meters Y0: meters Z0: meters Omega: grads Phi: grads Kappa: grads Ground to Model 3D Transformation Coefficients X-shift: Omega (DD): Y-shift: Phi (DD): Z-shift: Kappa (DD): Scale: Control Point Statistics (Full Report) Pt ID Adjusted Coordinates Residuals X Y Z VX VY VZ * C C C C C C C C C C
109 Pt ID Stdz. Residuals SVX SVY SVZ RX RY RZ * C C C C C C C C C C No. Iterations : 3 DOF : 14 Sigma : Sum of red.: RMS X Y Z XY Control: Check : * = Maximum Residual Vector W = Withheld Point, C = Check Point

110 Bilag 3C - Paspunktsoversigt

111 Bilag 3D Paspunktsskitser

112
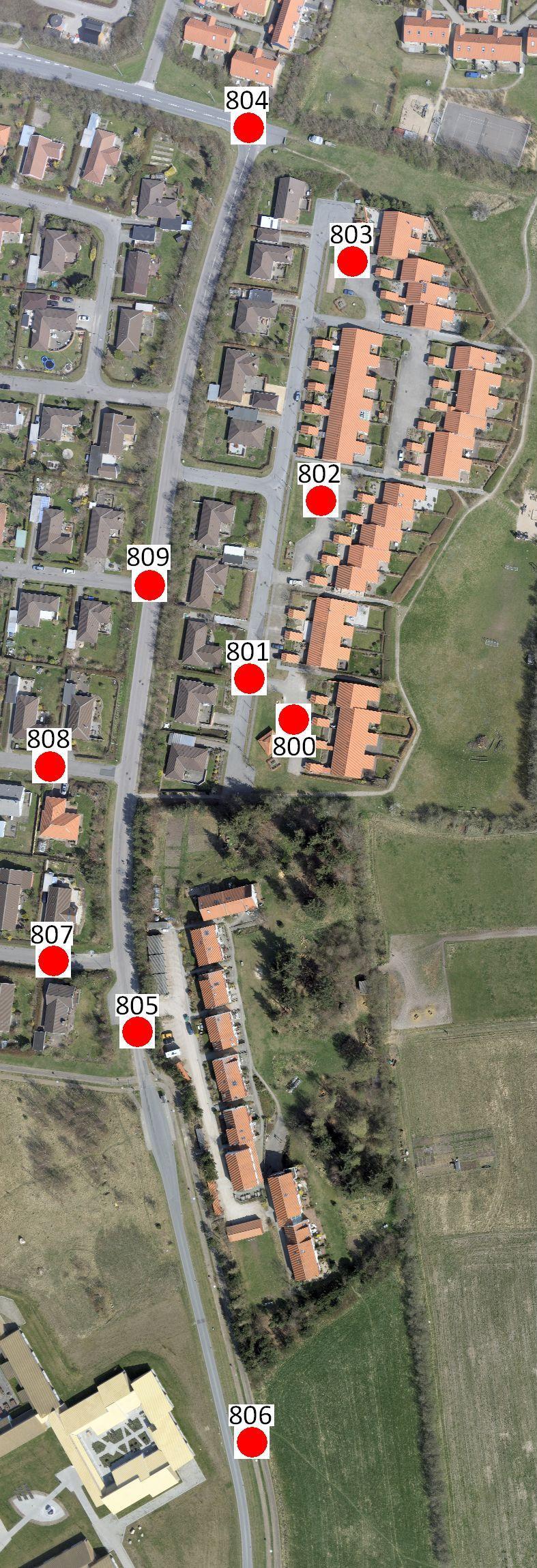
113 Bilag 3C Kontrolpunktsoversigt
114 Bilag 3F Kontrol af foto DTM start af script clear;clc; % Read-in DTM [X Y Z]m % DTM should be in a form of a grid! D=load('98_99_1.que'); % Read-in points to be interpolated and compared [X Y Z]m P=load(' opm.txt'); % size of the grid g=3; out=fopen('points_zinterp.txt','w'); m=length(p(:,1)); P_int=[]; for i=1:m j=find((d(:,1)==((floor(p(i,1)/g)+1)*g))&(d(:,2)==((floor(p(i,2)/g)+1)*g))) ; if isempty(j) P(i,:) disp('out of DTM range'); continue end Z1=D(j,3); a=(d(j,1)-p(i,1))/g; b=(d(j,2)-p(i,2))/g; j=find((d(:,1)==((floor(p(i,1)/g)+1)*g))&(d(:,2)==((floor(p(i,2)/g))*g))); if isempty(j) P(i,:) disp('out of DTM range'); continue end Z2=D(j,3); j=find((d(:,1)==((floor(p(i,1)/g))*g))&(d(:,2)==((floor(p(i,2)/g))*g))); if isempty(j) P(i,:) disp('out of DTM range'); continue end Z3=D(j,3); j=find((d(:,1)==((floor(p(i,1)/g))*g))&(d(:,2)==((floor(p(i,2)/g)+1)*g))); if isempty(j) P(i,:) disp('out of DTM range'); continue end Z4=D(j,3); Z=(1-a)*(1-b)*Z1+(1-a)*b*Z2+a*b*Z3+a*(1-b)*Z4; fprintf(out,'%13.2f %13.2f %10.2f %10.2f\r\n',P(i,1),P(i,2),P(i,3),Z); P_int=[P_int;P(i,1:3),Z]; end RMSE=sqrt(sum(dZ.^2)/n); i=find(abs(dz)>3*rmse); if isempty(i) nb=0; else nb=length(i); end; dz(i)=[]; out=fopen('statistics.txt','w'); fprintf(out,'number of interpolated points: %7.0f\r\n',n); fprintf(out,'rmse = %5.2f m \r\n',rmse); fprintf(out,'number of blunders: %7.0f\r\n',nb); fprintf(out,'\r\n'); fprintf(out,'after removing blunders\r\n'); n1=length(dz); RMSE_2=sqrt(sum(dZ.^2)/n1); M=mean(dZ); Sigma=sqrt(sum((dZ-M).^2)/(n1-1)); dz_max=max(abs(dz)); fprintf(out,'rmse = %5.2f m \r\n',rmse_2); fprintf(out,'mean = %5.2f m \r\n',m); fprintf(out,'sigma = %5.2f m \r\n',sigma); fprintf(out,'dz_max = %5.2f m \r\n',dz_max); fclose(out); Slut på script Resultat af script number of interpolated points: 21 RMSE = 0.10 m number of blunders: 0 After removing blunders RMSE = 0.10 m Mean = 0.09 m Sigma = 0.04 m dz_max = 0.19 m fclose(out); dz=p_int(:,3)-p_int(:,4); n=length(dz);

115 Bilag 3H Ortofoto
Tema: Landmåling og kortlægning. Projektperiode: 1. sept. 23. dec Synopsis: Projektgruppe: Henrik Skov. Nicolas Lemcke Horst
 Landmåling & Kortlægning -Ved Hadsundvej & Humlebakken Projektgruppe 4 Landinspektøruddanelsens 5. semester Henrik Skov, Nicolas Lemcke Horst & Anders Knørr Lyseen Aalborg Universitet december 2008 Landmåling
Landmåling & Kortlægning -Ved Hadsundvej & Humlebakken Projektgruppe 4 Landinspektøruddanelsens 5. semester Henrik Skov, Nicolas Lemcke Horst & Anders Knørr Lyseen Aalborg Universitet december 2008 Landmåling
Titel: Landmåling og Kortlægning, Harrestrup Ådal, Ballerup
 Landmåling og kortlægning Gruppe L5_CHP07 Jakob B. Frantzen og Birgitte R. Nissen Landinspektøruddannelsen 5. semester Aalborg Universitet København, København, december 2009 Titel: Landmåling og Kortlægning,
Landmåling og kortlægning Gruppe L5_CHP07 Jakob B. Frantzen og Birgitte R. Nissen Landinspektøruddannelsen 5. semester Aalborg Universitet København, København, december 2009 Titel: Landmåling og Kortlægning,
Kortlægning og Teknisk Måling
 Kortlægning og Teknisk Måling Aalborg Universitet Landinspektørstudiets Projektgruppe 13 December 2006 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Fibigerstræde 11-13 9220 Aalborg
Kortlægning og Teknisk Måling Aalborg Universitet Landinspektørstudiets Projektgruppe 13 December 2006 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Fibigerstræde 11-13 9220 Aalborg
Kortlægning og afsætning
 Projektrapport Gruppe L5AAL-02 2012 Kortlægning og afsætning Betavej og Den gamle Golfbane Landinspektørstudiet Aalborg Universitet December 2012 Titel: Kortlægning og afsætning Betavej og Den gamle Golfbane
Projektrapport Gruppe L5AAL-02 2012 Kortlægning og afsætning Betavej og Den gamle Golfbane Landinspektørstudiet Aalborg Universitet December 2012 Titel: Kortlægning og afsætning Betavej og Den gamle Golfbane
Aalborg Universitet København
 Aalborg Universitet København Aalborg Universitet Landinspektør, København Lautrupvang B & 15, 750 Ballerup Sekretær: Pia Skovlund Jensen Semester: 5. semester,.del Projektets titel: Kortlægning og afsætning
Aalborg Universitet København Aalborg Universitet Landinspektør, København Lautrupvang B & 15, 750 Ballerup Sekretær: Pia Skovlund Jensen Semester: 5. semester,.del Projektets titel: Kortlægning og afsætning
Projektrapport. Kortlægning og afsætning
 Projektrapport Kortlægning og afsætning Udarbejdet af gruppe L5aal2011_01 Landinspektøruddannelsens 5. semester Kathrine Schmidt, Winnie Husted Andersen og Esben Dalsgaard Johansen Aalborg Universitet,
Projektrapport Kortlægning og afsætning Udarbejdet af gruppe L5aal2011_01 Landinspektøruddannelsens 5. semester Kathrine Schmidt, Winnie Husted Andersen og Esben Dalsgaard Johansen Aalborg Universitet,
DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet. Den oprindelige definition af DTU-LOK er desværre gået tabt.
 Notat DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet 17. februar 2015 Projekt nr. 210914 Dokument nr. 1212704515 Version 5 Udarbejdet af MMKS 1 INDLEDNING Da DTU
Notat DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet 17. februar 2015 Projekt nr. 210914 Dokument nr. 1212704515 Version 5 Udarbejdet af MMKS 1 INDLEDNING Da DTU
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester, 2012
 Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester, 2012") Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og yggeri og Anlæg, 1. semester, 2012 LCG-1. Introduktion til landmåling 1. Danmarks fikspunktsregister (I) 2. Horisontalretningsmåling
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og yggeri og Anlæg, 1. semester, 2012 LCG-1. Introduktion til landmåling 1. Danmarks fikspunktsregister (I) 2. Horisontalretningsmåling
KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER
 KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER AALBORG UNIVERSITET LANDINSPEKTØRUDDANNELSEN 5. SEMESTER GRUPPE 4 DECEMBER 011 1 Titel: Kortlægning og afsætning Tema: Kortlægning
KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER AALBORG UNIVERSITET LANDINSPEKTØRUDDANNELSEN 5. SEMESTER GRUPPE 4 DECEMBER 011 1 Titel: Kortlægning og afsætning Tema: Kortlægning
Landmåling og Kortlægning
 Landmåling og Kortlægning Gruppe L5 10 2008 Aalborg Universitet Institut for samfundsudvikling og planlægning Landinspektøruddannelsens 5. semester Forord Nærværende rapport er udarbejdet i forbindelse
Landmåling og Kortlægning Gruppe L5 10 2008 Aalborg Universitet Institut for samfundsudvikling og planlægning Landinspektøruddannelsens 5. semester Forord Nærværende rapport er udarbejdet i forbindelse
Landmåling og kortlægning
 Landmåling og kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 6 Dijana Lubarda Malene Kobberø Regitse Vammen Titel/tema:
Landmåling og kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 6 Dijana Lubarda Malene Kobberø Regitse Vammen Titel/tema:
Titel: Detaljeret opmåling. Tema: Detaljeret opmåling. Projektperiode: 4. semester, 2. del. Projektgruppe: L4-12. Synopsis
 Detaljeret opmåling Aalborg Universitet Institut for Samfundsudvikling og Planlægning Landinspektøruddannelsens 4. semester, 2. del Gruppe L4-12 2009 Foråret 2009 2 Titel: Detaljeret opmåling Tema: Detaljeret
Detaljeret opmåling Aalborg Universitet Institut for Samfundsudvikling og Planlægning Landinspektøruddannelsens 4. semester, 2. del Gruppe L4-12 2009 Foråret 2009 2 Titel: Detaljeret opmåling Tema: Detaljeret
Notat. DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter INDHOLD. 1 Baggrund Etablering af de fysiske fikspunkter... 4
 Notat DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter April 2017 Udarbejdet af MMKS Kontrolleret af MHFR og LRLA Godkendt af MMKS INDHOLD 1 Baggrund... 2 1.1 Resultater... 3 2 Etablering af de fysiske
Notat DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter April 2017 Udarbejdet af MMKS Kontrolleret af MHFR og LRLA Godkendt af MMKS INDHOLD 1 Baggrund... 2 1.1 Resultater... 3 2 Etablering af de fysiske
Landinspektørstudiet Landmåling og kortlægning Gruppe 9 5. semester Omkring Aalborghus kollegiet Efteråret 2008
 Forord Denne rapport udgør, sammen med dens bilag, afrapporteringen af semesterprojektet for en projektgruppe på landinspektørstudiets femte semester, hvis overordnede tema er landmåling og kortlægning.
Forord Denne rapport udgør, sammen med dens bilag, afrapporteringen af semesterprojektet for en projektgruppe på landinspektørstudiets femte semester, hvis overordnede tema er landmåling og kortlægning.
Kortlægning og afsæning i Golfparken. Edin Ahmetspahic Catrine Gylling Jensen Marie Søndegård Jensen. Gruppe: L5aal
 Kortlægning og afsæning i Golfparken Af Edin Ahmetspahic Catrine Gylling Jensen Marie Søndegård Jensen Gruppe: L5aal2011-02 Gr. L5aal2011_02 Side 2 af 97 Kortlægning og afsætning: 19A~20A Efterår 2011
Kortlægning og afsæning i Golfparken Af Edin Ahmetspahic Catrine Gylling Jensen Marie Søndegård Jensen Gruppe: L5aal2011-02 Gr. L5aal2011_02 Side 2 af 97 Kortlægning og afsætning: 19A~20A Efterår 2011
Landmåling & Kortlægning. Landinspektøruddannelsens 5. semester 2009
 Landmåling & Kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 9 4. december 2009 Landmåling & kortlægning i og omkring Sohngaardsholmparken
Landmåling & Kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 9 4. december 2009 Landmåling & kortlægning i og omkring Sohngaardsholmparken
[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013
![[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013](/thumbs/59/43161553.jpg "[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013") 2013 Aalborg Universitet Landinspektørstudiet 4. Semester, 2. Del Af gruppe A3-2013: Michael H. Vittrup & Nicolaj H. Sørensen 21. juni 2013 [DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013 P4.2 Detaljeret opmåling
2013 Aalborg Universitet Landinspektørstudiet 4. Semester, 2. Del Af gruppe A3-2013: Michael H. Vittrup & Nicolaj H. Sørensen 21. juni 2013 [DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013 P4.2 Detaljeret opmåling
Afsætning og kortlægning
 2012 Afsætning og kortlægning Annie Bay-Smidt & Malte Holm-Christiansen Landinspektør 5.semester 03-12-2012 2 Afsætning og kortlægning Titelblad Titelblad Titel: Afsætning og kortlægning Tema: Afsætning
2012 Afsætning og kortlægning Annie Bay-Smidt & Malte Holm-Christiansen Landinspektør 5.semester 03-12-2012 2 Afsætning og kortlægning Titelblad Titelblad Titel: Afsætning og kortlægning Tema: Afsætning
Gruppe L4-AAL04. Detaljeret opmåling af område 5. Gruppe 4: Peter Bisgaard Jensen og Esben Dalsgaard Johansen
 Gruppe L4-AAL04 Detaljeret opmåling af område 5 Gruppe 4: Peter Bisgaard Jensen og Esben Dalsgaard Johansen 27. maj til 22. juni 2011 0 Gruppe L4-AAL04 1 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade
Gruppe L4-AAL04 Detaljeret opmåling af område 5 Gruppe 4: Peter Bisgaard Jensen og Esben Dalsgaard Johansen 27. maj til 22. juni 2011 0 Gruppe L4-AAL04 1 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade
ScanOBS nyhedsbrev. Dato: 4. maj 2018
 NYHEDSBREV 1-2018 www..dk ScanOBS nyhedsbrev Dato: 4. maj 2018 Jeg fremsender hermed nyhedsbrev for ScanOBS, der omhandler de seneste ændringer i ScanOBSprogrammerne, og jeg vil samtidigt benytte lejligheden
NYHEDSBREV 1-2018 www..dk ScanOBS nyhedsbrev Dato: 4. maj 2018 Jeg fremsender hermed nyhedsbrev for ScanOBS, der omhandler de seneste ændringer i ScanOBSprogrammerne, og jeg vil samtidigt benytte lejligheden
Aalborg Universitet København. Landinspektøruddannelsen 4. semester, 2. del. Detaljeret opmåling. Ballerup centrum, Linde Allé, Centrumgaden
 1 Detaljeret opmåling Ballerup Centrum, Linde Allé og Centrumgaden Aalborg Universitet København Landinspektøruddannelsen 4. semester, 2. del Detaljeret opmåling Ballerup centrum, Linde Allé, Centrumgaden
1 Detaljeret opmåling Ballerup Centrum, Linde Allé og Centrumgaden Aalborg Universitet København Landinspektøruddannelsen 4. semester, 2. del Detaljeret opmåling Ballerup centrum, Linde Allé, Centrumgaden
Landinspektøruddannelsen ved Aalborg Universitet
 Forside 1 Landinspektøruddannelsen ved Aalborg Universitet Institut 0, Institut for Samfundsudvikling og Planlægning Titel: Detaljeret opmåling i Dannebrogsgade/Istedgade Tema: Detaljeret opmåling Projektperiode:
Forside 1 Landinspektøruddannelsen ved Aalborg Universitet Institut 0, Institut for Samfundsudvikling og Planlægning Titel: Detaljeret opmåling i Dannebrogsgade/Istedgade Tema: Detaljeret opmåling Projektperiode:
RTK test udført ved Kort & Matrikelstyrelsen.
 Q RTK test udført ved Kort & Matrikelstyrelsen. Erfaringer fra 4 RTK test: Test af enkeltstations RTK, November 2000 Test af GPS referencens RTK løsning i Herning by, September 200 Test af Netværks RTK,
Q RTK test udført ved Kort & Matrikelstyrelsen. Erfaringer fra 4 RTK test: Test af enkeltstations RTK, November 2000 Test af GPS referencens RTK løsning i Herning by, September 200 Test af Netværks RTK,
Landmåling og kortlægning. Af område ved Golfparken og Sohngårdsvej
 Landåling og kortlægning Af oråde ved Golfparken og Sohngårdsvej Landinspektør 5. seester Gruppe L5-04 Aalborg Universitet Deceber 2009 Landåling og Kortlægning Af oråde ved Golfparken og Sohngårdsholvej
Landåling og kortlægning Af oråde ved Golfparken og Sohngårdsvej Landinspektør 5. seester Gruppe L5-04 Aalborg Universitet Deceber 2009 Landåling og Kortlægning Af oråde ved Golfparken og Sohngårdsholvej
Titel: Hovedpunktsmåling. Tema: Hovedpunktsmåling. Projektperiode: 21. april juni Projektgruppe: L6, Gruppe 11. Deltagere: Vejledere:
 L6 Gruppe 11 Hovedpunktsmåling 9. juni 2005 Titel: Hovedpunktsmåling Tema: Hovedpunktsmåling Projektperiode: 21. april 2005 9. juni 2005 Projektgruppe: L6, Gruppe 11 Deltagere: Sune Waagner Hansen Morten
L6 Gruppe 11 Hovedpunktsmåling 9. juni 2005 Titel: Hovedpunktsmåling Tema: Hovedpunktsmåling Projektperiode: 21. april 2005 9. juni 2005 Projektgruppe: L6, Gruppe 11 Deltagere: Sune Waagner Hansen Morten
5 spørgsmål om koordinatsystemer du ville ønske, du aldrig havde stillet! Erik Wirring Landinspektørfirmaet LE34. (ew@le34.dk)
") 5 spørgsmål om koordinatsystemer du ville ønske, du aldrig havde stillet! Erik Wirring Landinspektørfirmaet LE34 (ew@le34.dk) 5 spørgsmål om koordinatsystemer du vil ønske du aldrig havde stillet! 1. Hvorfor
5 spørgsmål om koordinatsystemer du ville ønske, du aldrig havde stillet! Erik Wirring Landinspektørfirmaet LE34 (ew@le34.dk) 5 spørgsmål om koordinatsystemer du vil ønske du aldrig havde stillet! 1. Hvorfor
Landmålingens fejlteori - Lektion4 - Vægte og Fordeling af slutfejl
 Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/36 Estimation af varians/spredning Antag X 1,...,X n stokastiske
Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/36 Estimation af varians/spredning Antag X 1,...,X n stokastiske
Skelfastlæggelse, opmåling og kortkonstruktion Gruppe 5.5. Aalborg Universitet Indholdsfortegnelse
 Skelfastlæggelse, opmåling og kortkonstruktion.5 Teknisk rapport Landinspektøruddannelsen Aalborg Universitet 2004 Indholdsfortegnelse 1 Indledning...3 1.1 Projektområdet...5 2 Skelfastlæggelse...6 3 Kravspecifikation...8
Skelfastlæggelse, opmåling og kortkonstruktion.5 Teknisk rapport Landinspektøruddannelsen Aalborg Universitet 2004 Indholdsfortegnelse 1 Indledning...3 1.1 Projektområdet...5 2 Skelfastlæggelse...6 3 Kravspecifikation...8
Danske koordinatsystemr (referencesystemer) MicroStation V8i. Begreber
 MicroStation V8i. Begreber") Danske koordinatsystemr (referencesystemer) MicroStation V8i Begreber 1 Columbus tog fejl! - jorden er flad når vi tegner i MicroStation!!! Geodætiske begreber definition af jorden Jordens overflade Jordens
Danske koordinatsystemr (referencesystemer) MicroStation V8i Begreber 1 Columbus tog fejl! - jorden er flad når vi tegner i MicroStation!!! Geodætiske begreber definition af jorden Jordens overflade Jordens
Titel: Detaljeret opmåling i område 9. Tema: Detaljeret Opmåling Projektperiode: 4. semester. Deltagere: Uffe Møller Holm. Simon Skovly Kristensen
 2 Detaljeret opmåling i område 9 Aalborg Universitet, Landinspektøruddannelsen 4 semester 3 Titel: Detaljeret opmåling i område 9 Tema: Detaljeret Opmåling Projektperiode: 4. semester Projektgruppe: L4-08
2 Detaljeret opmåling i område 9 Aalborg Universitet, Landinspektøruddannelsen 4 semester 3 Titel: Detaljeret opmåling i område 9 Tema: Detaljeret Opmåling Projektperiode: 4. semester Projektgruppe: L4-08
Udarbejdet af: L4-KBH01. Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff
 Udarbejdet af: L4-KBH01 Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff TITELBLAD Titel: Detaljeret opmåling Tema: Detailopmåling Projektperiode: 27.05.2011 til 22.06.2011 Projektgruppe: L4-KBH01
Udarbejdet af: L4-KBH01 Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff TITELBLAD Titel: Detaljeret opmåling Tema: Detailopmåling Projektperiode: 27.05.2011 til 22.06.2011 Projektgruppe: L4-KBH01
Vejledning SC 12.20. Per Dahl Johansen GEOTEAM A/S. pdj@geoteam.dk
 Vejledning SC 12.20. Per Dahl Johansen GEOTEAM A/S pdj@geoteam.dk Indhold: OPRET NYT JOB...4 JOBNAVN OG STIFINDER...4 DK SYSTEM2000 - UTM OG KP2000...5 DK SYSTEM 34...5 ØVRIGE JOB EGENSKABER...6 KOPIER
Vejledning SC 12.20. Per Dahl Johansen GEOTEAM A/S pdj@geoteam.dk Indhold: OPRET NYT JOB...4 JOBNAVN OG STIFINDER...4 DK SYSTEM2000 - UTM OG KP2000...5 DK SYSTEM 34...5 ØVRIGE JOB EGENSKABER...6 KOPIER
I dag: Digital projektering -formål. Give jer et indblik i, hvad det betyder at projektere digitalt, og hvad det kræver især med hensyn til data.
 I dag: Digital projektering -formål Give jer et indblik i, hvad det betyder at projektere digitalt, og hvad det kræver især med hensyn til data. Dagens emner Hvad er et digitalt kort? Digitale grunddata
I dag: Digital projektering -formål Give jer et indblik i, hvad det betyder at projektere digitalt, og hvad det kræver især med hensyn til data. Dagens emner Hvad er et digitalt kort? Digitale grunddata
Bilag 6. Referat M I L J Ø M I N I S T E R I E T. Hans Jacobsen, Kortkontoret, Esbjerg Kommune Mogens Lang Nielsen, Landinspektørerne Syd I/S
 Bilag 6 Referat M I L J Ø M I N I S T E R I E T Hans Jacobsen, Kortkontoret, Esbjerg Kommune Mogens Lang Nielsen, Landinspektørerne Syd I/S Mette Kjærsgaard, Matrikel- og Juraområdet, KMS KORT & MATRIKELSTYRELSEN
Bilag 6 Referat M I L J Ø M I N I S T E R I E T Hans Jacobsen, Kortkontoret, Esbjerg Kommune Mogens Lang Nielsen, Landinspektørerne Syd I/S Mette Kjærsgaard, Matrikel- og Juraområdet, KMS KORT & MATRIKELSTYRELSEN
Matlab script - placering af kran
 Matlab script - placering af kran 1 Til at beregne den ideelle placering af kranen hos MSK, er der gjort brug af et matlab script. Igennem dette kapitel vil opbygningen af dette script blive gennemgået.
Matlab script - placering af kran 1 Til at beregne den ideelle placering af kranen hos MSK, er der gjort brug af et matlab script. Igennem dette kapitel vil opbygningen af dette script blive gennemgået.
Specialkort med Valgdata
 Specialkort med Valgdata Søren Risbjerg Thomsen d. 25. april 2017 Introduktion I det følgende beskrives, hvordan man anvender Valgdata til at skabe specialkort, dvs. kort hvor man selv bestemmer indholdet
Specialkort med Valgdata Søren Risbjerg Thomsen d. 25. april 2017 Introduktion I det følgende beskrives, hvordan man anvender Valgdata til at skabe specialkort, dvs. kort hvor man selv bestemmer indholdet
Access version 1.5 Totalstation Opstilling Opmåling Afsætning
 Access version 1.5 Totalstation Opstilling Opmåling Afsætning Juli 2010 Per Dahl Johansen GEOTEAM A/S pdj@geoteam.dk Opstilling Opstilling af selve instrumentet Instrumentet opstilles på stativet og stilles
Access version 1.5 Totalstation Opstilling Opmåling Afsætning Juli 2010 Per Dahl Johansen GEOTEAM A/S pdj@geoteam.dk Opstilling Opstilling af selve instrumentet Instrumentet opstilles på stativet og stilles
MIA-måleblade i GeoCAD
 NOTE 1-2004 WWW.GeoCAD.dk MIA-måleblade i GeoCAD Udarbejdelse af måleblade til import fra MIA drejer sig primært om at få sat en tabel op til DSFLoversættelse, der benytter de af KMS definerede DSFL-koder.
NOTE 1-2004 WWW.GeoCAD.dk MIA-måleblade i GeoCAD Udarbejdelse af måleblade til import fra MIA drejer sig primært om at få sat en tabel op til DSFLoversættelse, der benytter de af KMS definerede DSFL-koder.
Tror du Jorden er flad? Erik Wirring Landinspektørfirmaet LE34
 Tror du Jorden er flad? Erik Wirring Landinspektørfirmaet LE34 (ew@le34.dk) https://twitter.com/flatearthorg?lang=da Verden som vi ser på den til dagligt i vores CAD system ( The Flat Earth made at
Tror du Jorden er flad? Erik Wirring Landinspektørfirmaet LE34 (ew@le34.dk) https://twitter.com/flatearthorg?lang=da Verden som vi ser på den til dagligt i vores CAD system ( The Flat Earth made at
Titel: Kombineret GNSS - GLONASS s indflydelse på præcisionen. Tema: Faglig og professionel udvikling. Synopsis:
 Titel: Kombineret GNSS - GLONASS s indflydelse på præcisionen Tema: Faglig og professionel udvikling Institut for Samfundsudvikling og Planlægning Aalborg Universitet Fibigerstræde 11-13 9220 Aalborg Øst
Titel: Kombineret GNSS - GLONASS s indflydelse på præcisionen Tema: Faglig og professionel udvikling Institut for Samfundsudvikling og Planlægning Aalborg Universitet Fibigerstræde 11-13 9220 Aalborg Øst
VIA UNIVERSITY COLLEGE. Building Tomorrow. Earthship
 VIA UNIVERSITY COLLEGE Building Tomorrow Earthship Afgangsprojekt,. Forår 2012 Landmålingsopgaver i forbindelse med etablering af Earthship hus. Her udføres situationsopmåling, nivellement, skelkonstatering
VIA UNIVERSITY COLLEGE Building Tomorrow Earthship Afgangsprojekt,. Forår 2012 Landmålingsopgaver i forbindelse med etablering af Earthship hus. Her udføres situationsopmåling, nivellement, skelkonstatering
Det tekniske kort samt 3D-model udarbejdes i referencesystemerne KP2000s og DVR90.
 Detaljeret opmåling Ballerup Centrum Gruppe 5 Jesper Nielsen & Birgitte R. Nissen Landinspektøruddannelsen 4. semester, 2. del Aalborg Universitet København, juni 2009 Forord Dette projekt er udarbejdet
Detaljeret opmåling Ballerup Centrum Gruppe 5 Jesper Nielsen & Birgitte R. Nissen Landinspektøruddannelsen 4. semester, 2. del Aalborg Universitet København, juni 2009 Forord Dette projekt er udarbejdet
Quick Guide for TopSURV RTK
 Quick Guide for TopSURV RTK GRS-1 GNSS og TopSURV v7.x Version 1.00 August 2010 1 Topcon hurtig guide til GNSS GRS-1 GPS+Glonass Modtager. GRS-1 Skrivebord, Windows mobile 6.1 Start for navigering til
Quick Guide for TopSURV RTK GRS-1 GNSS og TopSURV v7.x Version 1.00 August 2010 1 Topcon hurtig guide til GNSS GRS-1 GPS+Glonass Modtager. GRS-1 Skrivebord, Windows mobile 6.1 Start for navigering til
KONTROLOPMÅLING BØSTRUP Å
 Til Kalundborg Kommune Dokumenttype Rapport Dato Oktober 2015 KONTROLOPMÅLING BØSTRUP Å KONTROLOPMÅLING BØSTRUP Å Revision 01 Dato 22-10-2015 Udarbejdet af Michael Dalby Kristiansen Kontrolleret af Mads
Til Kalundborg Kommune Dokumenttype Rapport Dato Oktober 2015 KONTROLOPMÅLING BØSTRUP Å KONTROLOPMÅLING BØSTRUP Å Revision 01 Dato 22-10-2015 Udarbejdet af Michael Dalby Kristiansen Kontrolleret af Mads
Automatisk genkendelse af fælles- og fikspunkter
 Automatisk genkendelse af fælles- og fikspunkter Institut for Samfundsudvikling og Planlægning Landinspektøruddannelsens 10. Semester, Measurement Science Aalborg Universitet Projektgruppe L10MS-04 Søren
Automatisk genkendelse af fælles- og fikspunkter Institut for Samfundsudvikling og Planlægning Landinspektøruddannelsens 10. Semester, Measurement Science Aalborg Universitet Projektgruppe L10MS-04 Søren
Indholdsfortegnelse. Forord 7
 Indholdsfortegnelse Forord 7 1 Indledning 8 1.1 Baggrund 8 1.2 Kort som projekteringsgrundlag 8 1.3 Topografiske kort 8 1.4 Tekniske grundkort 9 1.5 Situationsplaner 10 1.6 Matrikelkortet 10 2 Landmåling
Indholdsfortegnelse Forord 7 1 Indledning 8 1.1 Baggrund 8 1.2 Kort som projekteringsgrundlag 8 1.3 Topografiske kort 8 1.4 Tekniske grundkort 9 1.5 Situationsplaner 10 1.6 Matrikelkortet 10 2 Landmåling
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester
 Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester") Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester LCG-2 Introduktion til GPS 1. Observationsteknikker og GPS-koncepter 2. Absolut positionering baseret på
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester LCG-2 Introduktion til GPS 1. Observationsteknikker og GPS-koncepter 2. Absolut positionering baseret på
Test af Netværks RTK og Enkeltstations RTK
 Test af Netværks RTK og Enkeltstations RTK Udgivet juli 2003 Test af GPSnet.dk og GPS-Referencen i Danmark Udført August 2002 Kurt Madsen og Sigvard Stampe Villadsen Indholdsfortegnelse 1 Introduktion...
Test af Netværks RTK og Enkeltstations RTK Udgivet juli 2003 Test af GPSnet.dk og GPS-Referencen i Danmark Udført August 2002 Kurt Madsen og Sigvard Stampe Villadsen Indholdsfortegnelse 1 Introduktion...
Vejledning i brug af TGO til import/eksport af data til vejafsætning/opmåling
 Vejledning i brug af TGO til import/eksport af data til vejafsætning/opmåling Indledning Denne vejledning tager udgangspunkt i to måder at arbejde med veje på. Fælles for de to måder er, at der skal defineres
Vejledning i brug af TGO til import/eksport af data til vejafsætning/opmåling Indledning Denne vejledning tager udgangspunkt i to måder at arbejde med veje på. Fælles for de to måder er, at der skal defineres
Ændringer i opsætning af GeoCAD-tabeller ved indførelsen af MIA3 og minimaks
 NOTE 2-2008 WWW.GeoCAD.dk Ændringer i opsætning af GeoCAD-tabeller ved indførelsen af MIA3 og minimaks Indførelsen af minimaks ved Kort- & Matrikelstyrelsen den 10. september 2008 vil medføre en række
NOTE 2-2008 WWW.GeoCAD.dk Ændringer i opsætning af GeoCAD-tabeller ved indførelsen af MIA3 og minimaks Indførelsen af minimaks ved Kort- & Matrikelstyrelsen den 10. september 2008 vil medføre en række
Landmaling. en introduktion. Landmåling en introduktion. Landmåling en introduktion. Nyt Teknisk Forlag. Jørgen Ullvit og Lars Fredensborg Matthiesen
 Er en indføring i landmåling, og er primært tiltænkt studerende på uddannelserne til bygningskonstruktør, byggetekniker og kort- og landmålingstekniker. Den vil uden tvivl også kunne finde anvendelse på
Er en indføring i landmåling, og er primært tiltænkt studerende på uddannelserne til bygningskonstruktør, byggetekniker og kort- og landmålingstekniker. Den vil uden tvivl også kunne finde anvendelse på
Kontrolopmåling 2012 af Øvre Suså
 Rekvirent Næstved Kommune Att. Palle Myssen Teknik- og miljøforvaltningen Rådmandshaven 20 4700 Næstved Rådgiver Orbicon Ringstedvej 20 4000 Roskilde Telefon 46 30 03 10 E-mail sgsc@orbicon.dk Sag 3691200001-02
Rekvirent Næstved Kommune Att. Palle Myssen Teknik- og miljøforvaltningen Rådmandshaven 20 4700 Næstved Rådgiver Orbicon Ringstedvej 20 4000 Roskilde Telefon 46 30 03 10 E-mail sgsc@orbicon.dk Sag 3691200001-02
Nordkystens Fremtid. Forundersøgelser. Topografisk survey GRIBSKOV KOMMUNE
 Nordkystens Fremtid Forundersøgelser Topografisk survey GRIBSKOV KOMMUNE 12. FEBRUAR 2018 Gribskov Kommune 12. februar 2018 www.niras.dk Indhold 1 Indledning 3 2 Dataindsamling og databehandling 3 2.1
Nordkystens Fremtid Forundersøgelser Topografisk survey GRIBSKOV KOMMUNE 12. FEBRUAR 2018 Gribskov Kommune 12. februar 2018 www.niras.dk Indhold 1 Indledning 3 2 Dataindsamling og databehandling 3 2.1
Endelig tilpasning af Færø geoiden til GPS og nivellement/vandstand: FOGEOID2011
 Endelig tilpasning af Færø geoiden til GPS og nivellement/vandstand: FOGEOID2011 Rene Forsberg Geodynamikafdelingen, DTU-Space 3 Okt / 17 Okt 2011 Dette notat giver baggrund for den endelige tilpasning
Endelig tilpasning af Færø geoiden til GPS og nivellement/vandstand: FOGEOID2011 Rene Forsberg Geodynamikafdelingen, DTU-Space 3 Okt / 17 Okt 2011 Dette notat giver baggrund for den endelige tilpasning
Opmålingsrapport Vendebæk Ringsted Kommune maj Ringsted Kommune. Vendebæk - opmålingsrapport
 Ringsted Kommune Vendebæk - opmålingsrapport Maj 2017 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER... 7 3.1 Stationskontrol... 8
Ringsted Kommune Vendebæk - opmålingsrapport Maj 2017 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER... 7 3.1 Stationskontrol... 8
Kalundborg Kommune Kontrolopmåling Rekvirent. Rådgiver. Kalundborg Kommune Plan Byg og Miljø Højvangen Svebølle
 Rekvirent Kalundborg Kommune Plan Byg og Miljø Højvangen 9 4470 Svebølle att. Michael Tranekjær Jensen Rådgiver Orbicon Leif Hansen A/S Ringstedvej 4000 Roskilde Telefon 46 30 03 10 E-mail fanm@orbicon.dk
Rekvirent Kalundborg Kommune Plan Byg og Miljø Højvangen 9 4470 Svebølle att. Michael Tranekjær Jensen Rådgiver Orbicon Leif Hansen A/S Ringstedvej 4000 Roskilde Telefon 46 30 03 10 E-mail fanm@orbicon.dk
Landmåling og kortlægning
 Landmåling og kortlægning Landinspektøruddannelsens 5. semester 2007 Gruppe 3 Institut for Samfundsudvikling og planlægning Aalborg Universitet Fibigerstræde 11-13 9220 Aalborg Øst Tlf: 96358080 http:land.aau.dk
Landmåling og kortlægning Landinspektøruddannelsens 5. semester 2007 Gruppe 3 Institut for Samfundsudvikling og planlægning Aalborg Universitet Fibigerstræde 11-13 9220 Aalborg Øst Tlf: 96358080 http:land.aau.dk
Ekspertgruppen for afklaring af tekniske problemstillinger ved at etablere og implementere en ny kortprojektion.
 Ekspertgruppen for afklaring af tekniske problemstillinger ved at etablere og implementere en ny kortprojektion. Erik Wirring, LE34 Peter Cederholm, AAU Henrik Vad Jensen, Vejdirektoratet Per Knudsen,
Ekspertgruppen for afklaring af tekniske problemstillinger ved at etablere og implementere en ny kortprojektion. Erik Wirring, LE34 Peter Cederholm, AAU Henrik Vad Jensen, Vejdirektoratet Per Knudsen,
Matematiske hjælpemidler. Koordinater. 2.1 De mange bredder.
 2. Matematiske hjælpemidler. Koordinater. 2.1 De mange bredder. 2.1 I Figur 1.1 i kapitel 1 er der vist et ideelt Kartesiske eller Euklidiske koordinatsystem, med koordinater ( X, Y, Z) = ( X 1, X 2, X
2. Matematiske hjælpemidler. Koordinater. 2.1 De mange bredder. 2.1 I Figur 1.1 i kapitel 1 er der vist et ideelt Kartesiske eller Euklidiske koordinatsystem, med koordinater ( X, Y, Z) = ( X 1, X 2, X
Vejledning vedr. Landmålingsprogrammet ScanObs
 ver. 26.01.2009 WWW.GeoCAD.dk vedr. Landmålingsprogrammet ScanObs Denne vejledning beskriver et nyt GeoCAD-program, der kan benyttes til udjævning af landmålingsobservationer. Programmet benytter et specielt
ver. 26.01.2009 WWW.GeoCAD.dk vedr. Landmålingsprogrammet ScanObs Denne vejledning beskriver et nyt GeoCAD-program, der kan benyttes til udjævning af landmålingsobservationer. Programmet benytter et specielt
Kontrolopmåling 2012. Rekvirent. Rådgiver. Faxe Kommune Att. Orbicon Ringstedvej 20 4000 Roskilde Telefon 46 30 03 10 E-mail sgsc@orbicon.
 Rekvirent Faxe Kommune Att. Rådgiver Orbicon Ringstedvej 20 4000 Roskilde Telefon 46 30 03 10 E-mail sgsc@orbicon.dk Sag 3691200053-03 Projektleder SGSC Kvalitetssikring SGSC Revisionsnr. 1.0 Godkendt
Rekvirent Faxe Kommune Att. Rådgiver Orbicon Ringstedvej 20 4000 Roskilde Telefon 46 30 03 10 E-mail sgsc@orbicon.dk Sag 3691200053-03 Projektleder SGSC Kvalitetssikring SGSC Revisionsnr. 1.0 Godkendt
Vægte motiverende eksempel. Landmålingens fejlteori - Lektion4 - Vægte og Fordeling af slutfejl. Vægtet model. Vægtrelationen
 Vægte motiverende eksempel Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@mathaaudk Institut for Matematiske Fag Aalborg Universitet Højdeforskellen mellem punkterne P
Vægte motiverende eksempel Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@mathaaudk Institut for Matematiske Fag Aalborg Universitet Højdeforskellen mellem punkterne P
Følgende er en detaljeret beskrivelse af webapplikationen Valdemar, hvordan den er bygget op og hvordan den bruges.
 Danmarks fikspunktsregister Valdemar. Vejledning Følgende er en detaljeret beskrivelse af webapplikationen Valdemar, hvordan den er bygget op og hvordan den bruges. Hvis du er ny som bruger af applikationen,
Danmarks fikspunktsregister Valdemar. Vejledning Følgende er en detaljeret beskrivelse af webapplikationen Valdemar, hvordan den er bygget op og hvordan den bruges. Hvis du er ny som bruger af applikationen,
Laserscanning - nøjagtighed ved sammenknytning
 Laserscanning - nøjagtighed ved sammenknytning Landinspektøruddannelsen Afgangsprojekt 2005 Aalborg Universitet Aalborg Universitet Landinspektøruddannelsen 10. semester Titel: Laserscanning nøjagtighed
Laserscanning - nøjagtighed ved sammenknytning Landinspektøruddannelsen Afgangsprojekt 2005 Aalborg Universitet Aalborg Universitet Landinspektøruddannelsen 10. semester Titel: Laserscanning nøjagtighed
AAU Landinspektøruddannelsen
 AAU Landinspektøruddannelsen Universal Mercator Projektion Mads Hvolby, Nellemann & Bjørnkjær 2003 UTM Projektion Indhold Forord Generelt UTM-Projektiionen UTM-Nettet Specifikationer for UTM-Projektionen
AAU Landinspektøruddannelsen Universal Mercator Projektion Mads Hvolby, Nellemann & Bjørnkjær 2003 UTM Projektion Indhold Forord Generelt UTM-Projektiionen UTM-Nettet Specifikationer for UTM-Projektionen
Brugervejledning ACU/TSCe + Trimble 5800 GPS
 Brugervejledning ACU/TSCe + Trimble 5800 GPS Juni 2004 af Henrik Lennartz-Johansen 1. Hovedmenu 2. Opstart 3. Opmåling 4. Afsætning Punkter Linier Bilag 1: Opsætning - Opsætning fravalg af optisk totalstation
Brugervejledning ACU/TSCe + Trimble 5800 GPS Juni 2004 af Henrik Lennartz-Johansen 1. Hovedmenu 2. Opstart 3. Opmåling 4. Afsætning Punkter Linier Bilag 1: Opsætning - Opsætning fravalg af optisk totalstation
Instruks for indmåling og datalevering samt føring af indmålingsskitser
 Kolding, den 29. april 2015 Instruks for indmåling og datalevering samt føring af indmålingsskitser 0. Instruksens formål og målgruppe Formålet med denne instruks er at være en kortfattet kravsbeskrivelse
Kolding, den 29. april 2015 Instruks for indmåling og datalevering samt føring af indmålingsskitser 0. Instruksens formål og målgruppe Formålet med denne instruks er at være en kortfattet kravsbeskrivelse
i x-aksens retning, så fås ). Forskriften for g fås altså ved i forskriften for f at udskifte alle forekomster af x med x x 0
. Forskriften for g fås altså ved i forskriften for f at udskifte alle forekomster af x med x x 0") BAndengradspolynomier Et polynomium er en funktion på formen f ( ) = an + an + a+ a, hvor ai R kaldes polynomiets koefficienter. Graden af et polynomium er lig med den højeste potens af, for hvilket den
BAndengradspolynomier Et polynomium er en funktion på formen f ( ) = an + an + a+ a, hvor ai R kaldes polynomiets koefficienter. Graden af et polynomium er lig med den højeste potens af, for hvilket den
DFF-EDB GNSS-Professionel
 DFF-EDB GNSS-Service - Professionel VELKOMMEN til informationer og vejledninger omkring DFF-EDB s GNSS-Service. De enkelte kapitler er farvemarkeret efter forskellig grupper af informationer. På hvert
DFF-EDB GNSS-Service - Professionel VELKOMMEN til informationer og vejledninger omkring DFF-EDB s GNSS-Service. De enkelte kapitler er farvemarkeret efter forskellig grupper af informationer. På hvert
Opmålingsrapport øvre Kværkeby Bæk Ringsted Kommune august Ringsted Kommune. Øvre Kværkeby Bæk opmålingsrapport
 Ringsted Kommune Øvre Kværkeby Bæk opmålingsrapport August 2016 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER... 7 3.1 Stationskontrol...
Ringsted Kommune Øvre Kværkeby Bæk opmålingsrapport August 2016 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER... 7 3.1 Stationskontrol...
Måling af turbulent strømning
 Måling af turbulent strømning Formål Formålet med at måle hastighedsprofiler og fluktuationer i en turbulent strømning er at opnå et tilstrækkeligt kalibreringsgrundlag til modellering af turbulent strømning
Måling af turbulent strømning Formål Formålet med at måle hastighedsprofiler og fluktuationer i en turbulent strømning er at opnå et tilstrækkeligt kalibreringsgrundlag til modellering af turbulent strømning
Opmålingsrapport Fjellebroløbet Ringsted Kommune april Ringsted Kommune. Fjellebroløbet - opmålingsrapport
 Ringsted Kommune Fjellebroløbet - opmålingsrapport April 2016 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 6 2.1 Generelt... 6 2.2 Arbejdsbeskrivelse... 6 2.3 Bemærkninger... 7 3. RESULTATER...
Ringsted Kommune Fjellebroløbet - opmålingsrapport April 2016 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 6 2.1 Generelt... 6 2.2 Arbejdsbeskrivelse... 6 2.3 Bemærkninger... 7 3. RESULTATER...
25-10-2011 1 af 49. Manual til ACU og Trimble 5600
 25-10-2011 1 af 49 Manual til ACU og Trimble 5600 25-10-2011 2 af 49 Manual til måling med Trimble ACU-controller (Ver. 10,72) 1: Opstart 2: Opmåling 3: Afsætning Punkter Linier 4: Robotfunktion 5: Satsmåling
25-10-2011 1 af 49 Manual til ACU og Trimble 5600 25-10-2011 2 af 49 Manual til måling med Trimble ACU-controller (Ver. 10,72) 1: Opstart 2: Opmåling 3: Afsætning Punkter Linier 4: Robotfunktion 5: Satsmåling
Andengradsligninger i to og tre variable
 enote 0 enote 0 Andengradsligninger i to og tre variable I denne enote vil vi igen beskæftige os med andengradspolynomierne i to og tre variable som også er behandlet og undersøgt med forskellige teknikker
enote 0 enote 0 Andengradsligninger i to og tre variable I denne enote vil vi igen beskæftige os med andengradspolynomierne i to og tre variable som også er behandlet og undersøgt med forskellige teknikker
Foreløbig udgave af læringsmål til: Kapitel 1 Regn med store tal Fælles Mål Læringsmål Forslag til tegn på læring
 Foreløbig udgave af læringsmål til: Kapitel 1 Regn med store tal Fælles Mål Læringsmål Forslag til tegn på læring udføre beregninger med de fire regningsarter inden for naturlige tal, herunder beregninger
Foreløbig udgave af læringsmål til: Kapitel 1 Regn med store tal Fælles Mål Læringsmål Forslag til tegn på læring udføre beregninger med de fire regningsarter inden for naturlige tal, herunder beregninger
Københavns Universitet. Opmålingsrapport - Amager, Nordfyn og Odense Pedersen, Jørn Bjarke Torp; Kroon, Aart. Publication date: 2010
 university of copenhagen Københavns Universitet Opmålingsrapport - Amager, Nordfyn og Odense Pedersen, Jørn Bjarke Torp; Kroon, Aart Publication date: 2010 Document Version Peer-review version Citation
university of copenhagen Københavns Universitet Opmålingsrapport - Amager, Nordfyn og Odense Pedersen, Jørn Bjarke Torp; Kroon, Aart Publication date: 2010 Document Version Peer-review version Citation
Opmålingsrapport Kværkeby Bæk Ringsted Kommune juni Ringsted Kommune. Kværkeby Bæk opmålingsrapport og hydrauliske beregninger
 Ringsted Kommune Kværkeby Bæk opmålingsrapport og hydrauliske beregninger Juni 2016 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER...
Ringsted Kommune Kværkeby Bæk opmålingsrapport og hydrauliske beregninger Juni 2016 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER...
Kortprojektioner L mm Referencesystemer. Ellipsoider og geoider. Ombecifring. Helmerttransformation.
 Kortprojektioner L4 2016 6.mm Referencesystemer. Ellipsoider og geoider. Ombecifring. Helmerttransformation. Lisbeth Fajstrup Institut for Matematiske Fag Aalborg Universitet L4 maj 2016 Lisbeth Fajstrup
Kortprojektioner L4 2016 6.mm Referencesystemer. Ellipsoider og geoider. Ombecifring. Helmerttransformation. Lisbeth Fajstrup Institut for Matematiske Fag Aalborg Universitet L4 maj 2016 Lisbeth Fajstrup
Kortprojektioner L mm Referencesystemer. Ellipsoider og geoider. Ombecifring. Helmerttransformation.
 Kortprojektioner L4 2017 6.mm Referencesystemer. Ellipsoider og geoider. Ombecifring. Helmerttransformation. Lisbeth Fajstrup & Iver Ottosen Institut for Matematiske Fag Aalborg Universitet L4 maj 2017
Kortprojektioner L4 2017 6.mm Referencesystemer. Ellipsoider og geoider. Ombecifring. Helmerttransformation. Lisbeth Fajstrup & Iver Ottosen Institut for Matematiske Fag Aalborg Universitet L4 maj 2017
Kortlægning og opmåling ved udbygning af Motorring 3 i København
 Kortlægning og opmåling ved udbygning af Motorring 3 i København Af Landinspektør Torben Weinkouff Rasmussen, Vejdirektoratet, Anlægsområdet twr@vd.dk Udbygning af en eksisterende motorvej i bymæssig område
Kortlægning og opmåling ved udbygning af Motorring 3 i København Af Landinspektør Torben Weinkouff Rasmussen, Vejdirektoratet, Anlægsområdet twr@vd.dk Udbygning af en eksisterende motorvej i bymæssig område
SmartWorx Viva/System 1200 Unleveled Setup
 er en applikation til Viva og SmartWorx System 1200, som muliggør beregning af fri opstilling og efterfølgende opmåling og afsætning med Leica totalstationer i tiltede koordinatsystemer og i et ustabilt
er en applikation til Viva og SmartWorx System 1200, som muliggør beregning af fri opstilling og efterfølgende opmåling og afsætning med Leica totalstationer i tiltede koordinatsystemer og i et ustabilt
Nærføring mellem banen Nykøbing F-Rødby og 132 kv kabelanlægget Radsted-Rødsand 2
 Dette dokument beskriver en nærføringssag med de forskellige aktiviteter, der er foretaget. En dyberegående teori omkring formler og tilnærmelser, som er anvendt kan studeres i Nærføringsudvalgets håndbog
Dette dokument beskriver en nærføringssag med de forskellige aktiviteter, der er foretaget. En dyberegående teori omkring formler og tilnærmelser, som er anvendt kan studeres i Nærføringsudvalgets håndbog
Analyse af måledata II
 Analyse af måledata II Usikkerhedsberegning og grafisk repræsentation af måleusikkerhed Af Michael Brix Pedersen, Birkerød Gymnasium Forfatteren gennemgår grundlæggende begreber om måleusikkerhed på fysiske
Analyse af måledata II Usikkerhedsberegning og grafisk repræsentation af måleusikkerhed Af Michael Brix Pedersen, Birkerød Gymnasium Forfatteren gennemgår grundlæggende begreber om måleusikkerhed på fysiske
Landmåler, en forberedelse. Af: Patrick B. og Jacob G.
 Landmåler, en forberedelse Af: Patrick B. og Jacob G. TEKNISK-MERKANTIL HØJSKOLE TITELBLAD RAPPORTTITEL: Landmåler, en forberedelse VEJLEDER: Jørgen Ullvit FORFATTER: DATO/UNDERSKRIFT: 12-06-2013 STUDIENUMMER:
Landmåler, en forberedelse Af: Patrick B. og Jacob G. TEKNISK-MERKANTIL HØJSKOLE TITELBLAD RAPPORTTITEL: Landmåler, en forberedelse VEJLEDER: Jørgen Ullvit FORFATTER: DATO/UNDERSKRIFT: 12-06-2013 STUDIENUMMER:
Projekt 9.5 Racefordomme i USA og Simpsons paradoks (B og A)
") Projekt 9.5 Racefordomme i USA og Simpsons paradoks (B og A) (Data er hentet fra M. Radelet, "Racial characteristics and imposition of death penalty", American Sociological Review, 46 (1981), pp 918-927
Projekt 9.5 Racefordomme i USA og Simpsons paradoks (B og A) (Data er hentet fra M. Radelet, "Racial characteristics and imposition of death penalty", American Sociological Review, 46 (1981), pp 918-927
Opmålingsrapport Frøsmose Å Ringsted Kommune juni Ringsted Kommune. Frøsmose Å - opmålingsrapport
 Ringsted Kommune Frøsmose Å - opmålingsrapport Juni 2016 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER... 7 3.1 Stationskontrol st.
Ringsted Kommune Frøsmose Å - opmålingsrapport Juni 2016 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER... 7 3.1 Stationskontrol st.
Referencelaboratoriet for måling af emissioner til luften
 Referencelaboratoriet for måling af emissioner til luften Rapport nr.: 77 Titel Hvordan skal forekomsten af outliers på lugtmålinger vurderes? Undertitel - Forfatter(e) Arne Oxbøl Arbejdet udført, år 2015
Referencelaboratoriet for måling af emissioner til luften Rapport nr.: 77 Titel Hvordan skal forekomsten af outliers på lugtmålinger vurderes? Undertitel - Forfatter(e) Arne Oxbøl Arbejdet udført, år 2015
Projekt 1 Spørgeskemaanalyse af Bedst på Nettet
 Projekt 1 Spørgeskemaanalyse af Bedst på Nettet D.29/2 2012 Udarbejdet af: Katrine Ahle Warming Nielsen Jannie Jeppesen Schmøde Sara Lorenzen A) Kritik af spørgeskema Set ud fra en kritisk vinkel af spørgeskemaet
Projekt 1 Spørgeskemaanalyse af Bedst på Nettet D.29/2 2012 Udarbejdet af: Katrine Ahle Warming Nielsen Jannie Jeppesen Schmøde Sara Lorenzen A) Kritik af spørgeskema Set ud fra en kritisk vinkel af spørgeskemaet
Skrevet af stud. geom. Martin Hedegaard, Aalborg Universitet, virksomhedspraktikant
 Laserscanning af Boy Skrevet af stud. geom. Martin Hedegaard, Aalborg Universitet, virksomhedspraktikant hos AAKJAER Landinspektører. Kunstværket Boy blev skabt af den australske kunstner Ron Muecks i
Laserscanning af Boy Skrevet af stud. geom. Martin Hedegaard, Aalborg Universitet, virksomhedspraktikant hos AAKJAER Landinspektører. Kunstværket Boy blev skabt af den australske kunstner Ron Muecks i
METODEBESKRIVELSE, VISUALISERINGSFORSLAG 1, 2 & 3,
 Bilag til miljøvurdering af Forslag til Lokalplan 05.01.L05 og Forslag til Kommuneplantillæg 11 METODEBESKRIVELSE, VISUALISERINGSFORSLAG 1, 2 & 3, 0 ALTERNATIV SAMT SIMULERINGER FOR HAVVANDSSTIGNINGER
Bilag til miljøvurdering af Forslag til Lokalplan 05.01.L05 og Forslag til Kommuneplantillæg 11 METODEBESKRIVELSE, VISUALISERINGSFORSLAG 1, 2 & 3, 0 ALTERNATIV SAMT SIMULERINGER FOR HAVVANDSSTIGNINGER
Færdigheds- og vidensområder
 Klasse: Mars 6./7. Skoleår: 16/17 Eleverne arbejder med bogsystemet format, hhv. 6. og 7. klasse. Da der er et stort spring i emnerne i mellem disse trin er årsplanen udformet ud fra Format 7, hvortil
Klasse: Mars 6./7. Skoleår: 16/17 Eleverne arbejder med bogsystemet format, hhv. 6. og 7. klasse. Da der er et stort spring i emnerne i mellem disse trin er årsplanen udformet ud fra Format 7, hvortil
RENTES REGNING SIMULATION LANDMÅLING MÅLSCORE I HÅNDBO . K R I S T I A N S E N KUGLE G Y L D E N D A L
 SIMULATION 4 2 RENTES REGNING F I NMED N H REGNEARK. K R I S T I A N S E N KUGLE 5 LANDMÅLING 3 MÅLSCORE I HÅNDBO G Y L D E N D A L Faglige mål: Anvende simple geometriske modeller og løse simple geometriske
SIMULATION 4 2 RENTES REGNING F I NMED N H REGNEARK. K R I S T I A N S E N KUGLE 5 LANDMÅLING 3 MÅLSCORE I HÅNDBO G Y L D E N D A L Faglige mål: Anvende simple geometriske modeller og løse simple geometriske
Analyse af en lineær regression med lav R 2 -værdi
 Analyse af en lineær regression med lav R 2 -værdi Denne gennemgang omhandler figur 13 i Regn med biologi. Man kan sagtens lave beregninger på egne data. Forsøgsmæssigt kræver det bare en tommestok tapet
Analyse af en lineær regression med lav R 2 -værdi Denne gennemgang omhandler figur 13 i Regn med biologi. Man kan sagtens lave beregninger på egne data. Forsøgsmæssigt kræver det bare en tommestok tapet
Excel regneark. I dette kapitel skal I arbejde med noget af det, Excel regneark kan bruges til. INTRO EXCEL REGNEARK
 Excel regneark Et regneark er et computerprogram, der bl.a. kan regne, tegne grafer og lave diagrammer. Regnearket kan bruges i mange forskellige sammenhænge, når I arbejder med matematik. Det kan gøre
Excel regneark Et regneark er et computerprogram, der bl.a. kan regne, tegne grafer og lave diagrammer. Regnearket kan bruges i mange forskellige sammenhænge, når I arbejder med matematik. Det kan gøre
Fynsgade Silkeborg Tlf maj 2009
 Q/Holm SE Nr. 10 47 53 41 Fynsgade 4 8600 Silkeborg Tlf. 86 80 54 03 21 41 83 46 tfh@qholm.dk 12. maj 2009 Holbæk Kommune Projekt: Kontrolopmåling af Åmose Å Fra Skellingsted Bro st. 17. 462 Til Bromølle
Q/Holm SE Nr. 10 47 53 41 Fynsgade 4 8600 Silkeborg Tlf. 86 80 54 03 21 41 83 46 tfh@qholm.dk 12. maj 2009 Holbæk Kommune Projekt: Kontrolopmåling af Åmose Å Fra Skellingsted Bro st. 17. 462 Til Bromølle
Arbejdet på kuglens massemidtpunkt, langs x-aksen, er lig med den resulterende kraft gange strækningen:
 Forsøgsopstilling: En kugle ligger mellem to skinner, og ruller ned af den. Vi måler ved hjælp af sensorer kuglens hastighed og tid ved forskellige afstand på rampen. Vi måler kuglens radius (R), radius
Forsøgsopstilling: En kugle ligger mellem to skinner, og ruller ned af den. Vi måler ved hjælp af sensorer kuglens hastighed og tid ved forskellige afstand på rampen. Vi måler kuglens radius (R), radius
Emne Tema Materiale r - - - - - aktiviteter
 Fag: Matematik Hold: 24 Lærer: TON Undervisningsmål Læringsmål 9 klasse 32-34 Introforløb: række tests, som viser eleverne faglighed og læringsstil. Faglige aktiviteter Emne Tema Materiale r IT-inddragelse
Fag: Matematik Hold: 24 Lærer: TON Undervisningsmål Læringsmål 9 klasse 32-34 Introforløb: række tests, som viser eleverne faglighed og læringsstil. Faglige aktiviteter Emne Tema Materiale r IT-inddragelse
Mikro-kursus i statistik 1. del. 24-11-2002 Mikrokursus i biostatistik 1
 Mikro-kursus i statistik 1. del 24-11-2002 Mikrokursus i biostatistik 1 Hvad er statistik? Det systematiske studium af tilfældighedernes spil!dyrkes af biostatistikere Anvendes som redskab til vurdering
Mikro-kursus i statistik 1. del 24-11-2002 Mikrokursus i biostatistik 1 Hvad er statistik? Det systematiske studium af tilfældighedernes spil!dyrkes af biostatistikere Anvendes som redskab til vurdering
5. JULI Kontrolopmåling og regulativkontrol Vandløb: Kølle Å. AGROHYDROLOGERNE APS CVR nr Markstien 2 DK-4640 Faxe
 5. JULI 2019 Kontrolopmåling og regulativkontrol Vandløb: AGROHYDROLOGERNE APS CVR nr. 35027246 Markstien 2 DK-4640 Faxe Udarbejdet for: Vandløbsmedarbejder Frej Faurschou Hastrup Holbæk Kommune Vækst
5. JULI 2019 Kontrolopmåling og regulativkontrol Vandløb: AGROHYDROLOGERNE APS CVR nr. 35027246 Markstien 2 DK-4640 Faxe Udarbejdet for: Vandløbsmedarbejder Frej Faurschou Hastrup Holbæk Kommune Vækst
Opmålingsrapport Ågårdsløbet Ringsted Kommune maj Ringsted Kommune. Ågårdsløbet - opmålingsrapport
 Ringsted Kommune Ågårdsløbet - opmålingsrapport Maj 2017 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER... 7 3.1 Stationskontrol...
Ringsted Kommune Ågårdsløbet - opmålingsrapport Maj 2017 1 Indholdsfortegnelse 1. INDLEDNING... 3 2. OPMÅLING... 5 2.1 Generelt... 5 2.2 Arbejdsbeskrivelse... 5 3. RESULTATER... 7 3.1 Stationskontrol...