Differentialligninger af første orden
|
|
|
- Bertha Kristensen
- 8 år siden
- Visninger:
Transkript
1 Differentialligninger af første orden Preben Alsholm Februar 2006 Basale begreber. Eksistens og entydighed. En differentialligning af første orden er en ligning, der sammenknytter differentialkvotienten af en funktion med funktionen selv og den uafhængige variable. Eksempel Hver af ligningerne x (t)+2x(t)=5sint e t x (t)+7x(t) 2 =3t+5 x (t)=4x(t) x (t)=3x(t) x(t) er en differentialligning af første orden. Den ubekendte i en differentialligning er en funktion, der i alle fire eksempler hedder x. Den uafhængige variable er t. Ofte underforstås den uafhængige variableix(t)ogx (t),sådifferentialligningerneistedetskrivessåledes x +2x=5sint e t x +7x 2 =3t+5 x =4x x =3x x Istedetforx benyttesmegetofte dt såledesateksempelvisdensidstedifferentialligningskrives på formen dt =3x x Iallefiredifferentialligningerovenforkanx (t)isoleres,jafaktiskerdetalleredegjortide to sidste. Vi skal altid forudsætte, at dette kan lade sig gøre. Hermed kan en differentialligning af første orden skrives på formen x =f(t,x) () Her er f en reel funktion af 2 variable defineret i en mængde i(t, x)-planen. Differentialligningen ()kanskriveslidtmereudførligtpåformenx (t)=f(t,x(t)).

2 Eksempel2 Fordefireligningerovenforfindervi,atfunktionenf i()ergivetvedhenholdsvis f(t,x)= 2x+5sint f(t,x)=e t( 7x 2 +3t+5 ) f(t,x)=4x f(t,x)=3x x Definition 3 Differentialligningen() kaldes autonom, hvis f(t, x) faktisk ikke afhænger af t. Viser,atdetosidstedifferentialligningeriEksempel2erautonome.Detoførsteerikke. Definition 4 Ved en løsning til differentialligningen() forstås en differentiabel funktion φ defineretpået intervali,så φ (t)=f(t,φ(t)) for alle t I.Ved den fuldstændige løsning til() forstås en formel for samtlige løsninger. Eksempel5 Differentialligningen x +2x=5sint har som en af sine løsninger funktionen φ givetvedφ(t)= cost+2sintforallet R.Atbevisedennepåstandbestårblotiaterstattexi differentialligningen med φ, og dernæst kontrollere, at vi opnår en identitet, dvs. en ligning opfyldt foralletietinterval.vedindsættelseivenstresidenafdifferentialligningenx +2x=5sintfås d dt ( cost+2sint)+2( cost+2sint)=(sint+2cost)+2( cost+2sint) hvilketnetoper5sint,altsåligmedhøjresidenidifferentialligningen.hermedervist,atφ(t)= cost+2sinterløsningtildifferentialligningenx +2x=5sintforallet R.Senereblivervi i stand til at vise, at differentialligningens fuldstændige løsning er givet ved x(t)= cost+2sint+ce 2t (2) hvor t R og hvor C er en reel konstant. Betydningen afdette udsagn er,at for enhver værdi afkonstantenc i(2)opnåsenløsning,ogforenhverløsningfindesenkonstantc,såløsningen kanskrivespåformen(2).mankaldercforenarbitrærkonstant.medc=0opnåsdenløsning vi betragtede i begyndelsen af eksemplet. Eksempel6 Differentialligningenx =2tx 2 harsom3afsineløsningerfunktionerne φ (t)= 4 t 2 defineretfort ], 2[ φ 2 (t)= 4 t 2 defineretfort ] 2,2[ φ 3 (t)= 4 t 2 defineretfort ]2, [ Bemærkaltså,atselvomregneforskrifternefor φ,φ 2 ogφ 3 erdensamme,såregnesde3løsninger for forskellige, idet de er definerede på forskellige intervaller. Verificeringen af påstanden erdensammeforalle3,såviudførerdenkunfordenførste: φ (t)= d dt4 t 2 = (4 t 2 ) 2 ( 2t)=2t (4 t 2 ) 2 =2t φ (t) 2 faktiskgyldignårblott ±2. 2
 forstås en formel for samtlige løsninger. Eksempel5 Differentialligningen x +2x=5sint har som en af sine løsninger funktionen φ givetvedφ(t)= cost+2sintforallet R.")
3 Huskpå,atφ (t)erhældningenfortangententilgrafenforφipunktet(t,φ(t)).udsagnet φ (t) = f(t,φ(t)) siger derfor, at hældningen for tangenten til løsningen kan beregnes udfra kendskab til den øjeblikkelige position(t,φ(t)). At have givet en differentialligning dt =x = f(t,x)ietområdeaf(t,x)-planeneraltsåathavegivetethældningsfelt. Mankansige,atløsningafdifferentialligningenx =f(t,x)beståribestemmelseafkurver, deriethvertpunkt(t,x)hardenrigtigehældningf(t,x). x(t) t 0.5 Figur.Hældningsfeltetforx =t 2 +x 2 meddenløsning,deropfylderx(0)= 0.4 Definition 7 Ved begyndelsesværdiproblemet for differentialligningen() forstås bestemmelsen afdenellerdeløsningertil(),derogsåopfylderenbegyndelsesbetingelseafformenx(t 0 )=x 0. Eksempel8 Vilvibestemmedenløsningtildifferentialligningenx +2x=5sint,deropfylder begyndelsesbetingelsen x(0) = 2, så finder vi først den fuldstændige løsning, som i dette tilfælde er(2).idenneindsættervit=0: x(0)= cos0+2sin0+ce 0 = +C Dax(0)=2fåsC=3.Densøgteløsningerhermed: x(t)= cost+2sint+3e 2t Et presserende spørgsmål er nu, om begyndelsesværdiproblemet for differentialligningen() overhovedetharnogenløsning,ogigivetfaldomderermereendén.svareter,athvisfunktionen f i differentialligningen () er tilstrækkelig "pæn", så har begyndelsesværdiproblemet for () præcis én løsning. At sige, at en funktion er pæn, er jo ikke særligt præcist. Man vil forstå, hvorfor vi siger detpå denmåde, nårvi nu for god ordens skyldbringer to præcise sætninger herom: Sætning9 Eksistenssætning.LadDværeenåbendelmængdeafR 2 oglad(t 0,x 0 ) D.Antag, atf erenkontinuertfunktiondefineretpåd.såharbegyndelsesværdiproblemetx(t 0 )=x 0 for differentialligningen dt =f(t,x)mindsténløsning. 3
beståribestemmelseafkurver, deriethvertpunkt(t,x)hardenrigtigehældningf(t,x). x(t) 0.5 0.5 0 0.5 t 0.5 Figur.")
4 Bemærkning 0 Vi beklager, at der optræder begrebet kontinuitet af funktion af 2 variable, et begreb, som læseren på dette tidspunkt ikke formodes at have kendskab til. Da læseren dog har kendskab til kontinuitetsbegrebet for funktion af én variabel, kan man håbe, at det indtryk efterlades, at næsten alle begyndelsesværdiproblemer for differentialligninger af første orden har mindst én løsning. I afsnittet om separable differentialligninger gives et eksempel på en differentialligning, der opfylder betingelserne i eksistenssætningen, men som har mere end én løsning gående gennem et givet punkt(faktisk uendeligt mange). De differentialligninger vi skal møde opfylder dog næsten alle betingelserne i den næste sætning: Sætning Eksistens- og entydighedssætning. Lad D være en åben delmængde af R 2. Lad f væreenkontinuertfunktiondefineretpåd,ogantag,atf harenkontinuertpartielafledetmht. x i D. Lad (t 0,x 0 ) D. Så har begyndelsesværdiproblemet x(t 0 )=x 0 for differentialligningen dt =f(t,x)netopénløsning. Bemærkning 2 Det er i eksistens- og entydighedssætningen underforstået, at der tales om maksimale løsninger. En løsning kaldes maksimal, hvis dens definitionsinterval ikke kan udvides til et større interval. Eksempelvis er hver af de i Eksempel 6 givne tre løsninger maksimale. 2 Løsningsmetoder for specielle klasser af differentialligninger I gennem de godt 300 år man har arbejdet med differentialligninger har man forsøgt at finde løsningsmetoder for differentialligninger. Man ønsker meget gerne formeludtryk for løsningerne. Der findes da også en mængde metoder, der hver for sig kan klare en klasse af differentialligninger. Men der findes ikke nogen enkelt metode, der kan bruges i alle tilfælde. Tværtimod er situationen den, at for langt de fleste differentialligninger har man ikke andet at ty til end eksistens- og entydighedssætningen. Dvs. det viser sig umuligt at bestemme en formel for den løsning, som man dog véd findes. En lignende situation møder vi ved bestemmelsen af integraler. Eksempelvis er funktionen f : t /(t+lnt) jo kontinuert på intervallet [,2] og derfor eksisterer det bestemte integral 2 t+lnt dt Skalviudregneintegraletpåsædvanligmåde,måvihavefatienstamfunktiontilf.Ensådaner imidlertid ikke lige til at finde! Faktisk kan Maple heller ikke. Det er muligt, at en stamfunktion til f slet ikke kan udtrykkes ved allerede kendte funktioner. Vi er dermed overladt til en numerisk bestemmelse af integralet. Bruger vi en numerisk metode finder vi 2 t+lnt dt= med 0 betydende cifre. Faktisk er integrationseksemplet ikke helt ved siden af. Bestemmelsen af en stamfunktion til f kan betragtes som et spørgsmål om at løse differentialligningen x (t) = f(t), altså i vores tilfælde løse differentialligningen x = t+lnt Vi må altså forvente, at skulle bruge numeriske metoder ved bestemmelsen af løsninger til mange af de differentialligninger, som vi møder i anvendelserne. 4

5 Vi skal i de næste to afsnit betragte to vigtige klasser af differentialligninger for hvilke der kan gives løsningsmetoder i den forstand, at løsning kan reduceres til stamfunktionsbestemmelse. Metodernes endelige succes afhænger dermed af muligheden af at finde stamfunktioner til visse funktioner. 2. Separable differentialligninger En separabel differentialligning er en differentialligning, der kan skrives på formen dt =h(t)g(x) (3) hvorhøjresidenaltsåkanskrivessometproduktaftofaktorer,hvordeneneikkeindeholderx ogdenandenikkeindeholdert(udengennemx(t)). Eksempel 3 Differentialligningerne dt =2t( x)2 dt = x( x) +t 2 er begge separable. Vi løser dem senere i dette afsnit. Løsning af separable differentialligninger er jo pensum i gymnasiet, så vi forudsætter en vis erfaring med løsningen af sådanne. Her følger dog en noget voldsomt udseende sætning, der siger, hvordan løsningerne kan findes. Sætning 4 Betragt differentialligningen(3), hvor h er kontinuert på det åbne interval I og g kontinuert på det åbne interval J. Så gælder:. Lad φ være en funktion, der på intervallet I opfylder g(φ(t)) 0 for alle t I. Så er x=φ(t)løsningtildifferentialligningen(3)påintervalleti,hvisogkunhvisx=φ(t)på intervallet I er løsning til ligningen forenellerandenkonstantk. g(x) = h(t)dt+k (4) 2. Den konstante funktion x = φ(t) = x 0, t I, er en løsning til (3), hvis og kun hvis g(x 0 )=0(forudsatathikkeeridentisklignuliI). 3. Hvis begyndelsesværdiproblemet for (3) har entydigt bestemte løsninger gennem ethvert punktii J,såbestårdenfuldstændigeløsningtil(3)afdeløsninger,derfindesvedseparation af de variable(altså de løsninger, der implicit er givet ved(4)) samt af eventuelle konstante løsninger. Bevis.Vitagerdetredeleirækkefølge:. La=φ(t)væreenløsningtildifferentialligningen(3)påintervalletI medg(φ(t)) 0 forallet I.Såharvi φ (t)=g(φ(t))h(t) 5
).")
6 forallet I.Veddivisionmedg(φ(t))fås φ (t) g(φ(t)) =h(t) Vedubestemtintegrationmht.tfås,atderfindesenkonstantk,så φ (t) g(φ(t)) dt= h(t)dt+k Iintegraletpåvenstresideindførervisubstitutionenx=φ(t).Vifinderså=φ (t)dt, hvormed vi har g(x) = h(t)dt+k hvilket er (4). Antag omvendt, at x = φ(t) er en løsning til ligningen (4) på intervallet I medg(φ(t)) 0 foralle t I foreneller andenværdi afkonstantenk.vikanskrive (4) på formen G(x) = H(t)+k, hvor G(x) er en stamfunktion til g(x) på et interval J på hvilket g(x) 0, og som indeholder værdimængden for φ(t),t I, og hvor H er en stamfunktion til h på I. Da dermed φ(t) = G (H(t)), er φ differentiabel på I, og vi har G (φ(t))φ (t) = H φ(t) (t), dvs. g(φ(t)) = h(t) for alle t I. Altså gælder også φ (t)=g(φ(t))h(t),dvs.atφpåi opfylder(3). 2. Hvisg(x 0 )=0,såerx=φ(t)=x 0,t I,klartløsningtil(3).Hvisomvendtx=f(t)= x 0,t I,erløsningtil(3),såerenteng(x 0 )=0ellerh(t)=0forallet I.Hvisderfor hikkeeridentisklignulii,såmåg(x 0 )værelignul. 3. Følgerumiddelbartaf.og2. Sætning5 LadIogJværeåbneintervaller.LadhværekontinuertpåIogladgværedifferentiabelpåJ medkontinuertafledetg,såharbegyndelsesværdiproblemet hvort 0 I ogx 0 J præcisénløsning. dt =h(t)g(x), x(t 0)=x 0 Bevis. Resultatet følger umiddelbart af eksistens- og entydighedssætningen. Bemærkning 6 Vedseparationafdevariableopnåssombeskrevetenligning(4)mellemtog x. Denne ligning definerer løsningen x implicit som en funktion af t. Ligningen er ofte temmelig vanskelig at løse, selv hvis de to integraler kan udregnes! Undertiden er det nødvendigt at løse den ved hjælp af numeriske metoder. I så fald kunne det være en fordel i stedet at løse selve differentialligningen numerisk. Bemærkning 7 I de tilfælde, hvor det er lykkedes at løse (4) mht. x, er det ofte svært at bestemme det interval, på hvilket det fundne funktionsudtryk løser differentialligningen. Ofte afhænger dette definitionsinterval af konstanten k. 6
 på formen G(x) = H(t)+k, hvor G(x) er en stamfunktion til g(x) på et interval J på hvilket g(x) 0, og som indeholder værdimængden for φ(t),t I, og hvor H er en stamfunktion til h på I.")
7 Eksempel 8 For differentialligningen dt =2t(x )2 (5) ønskes den fuldstændige løsning bestemt. Desuden ønskes fundet den løsning, der opfylder begyndelsesbetingelsenx(0)= 2. Differentialligningenerseparabel.Dah(t)=2terkontinuertpåRogdag(x)=(x ) 2 åbenbart er differentiabel med kontinuert differentialkvotient g (x)=2x 2 på R, går der igennem ethvert punkt i planen R 2 netop én løsning. Vi undersøger først, om differentialligningen har konstante løsninger. Vi skal da løse ligningen g(x) = 0, dvs. (x ) 2 = 0. Denne ligning har åbenbart løsningen. Altså har differentialligningen den konstante løsning x =. Alle andre løsninger er voksende for t >0 og aftagende for t <0, idet jo x (t)=2t(x(t) ) 2 åbenbart harsammefortegnsomt. Vi bestemmer nu formeludtryk for de løsninger, der ikke er konstante. Disse løsninger findes ved separation (x ) 2 = 2tdt+C hvor C er en arbitrær konstant. Ved integration fås x =t2 +C Man vil nu sige, at differentialligningen er løst, men at løsningen er givet på implicit form. Manvilnormaltgernehaveløsningenpåeksplicitform,dvs.atmandirekteharenformel,der fortællerhva(t)erligmed.viskalaltsånuisolerex.vifinder x= t 2 +C (6) Denfuldstændigeløsningbeståraltsåaf(6)ogdenkonstanteløsningx=. Denløsning,deropfylderbegyndelsesbetingelsenx(0)= 2 findesvedindsættelseaft=0i(6): 2 =x(0)= C såc=2.løsningeneraltsåx(t)= / ( t 2 +2 ) = ( t 2 + ) / ( t 2 +2 ).Løsningenerdefineret påheler. 7
 = 0, dvs. (x ) 2 = 0. Denne ligning har åbenbart løsningen.")
8 2.5 x(t) t 0.5 Figur2.Hældningsfeltetforx =2t(x ) 2 sammenmed7løsninger. Øvelse 9 Deløsningertil(5),deropfylderbegyndelsesbetingelsex(0)=x 0 me 0 >erikke defineret på hele R. Definitionsintervallet for en løsning skal naturligvis indeholde den t-værdi for hvilken begyndelsesværdien er givet, i dette tilfælde altså t = 0. Find definitionsintervallet for den løsning, der opfylder begyndelsesbetingelsen x(0) = 2. Eksempel 20 For differentialligningen dt = x( x) +t 2 ønskesdenfuldstændigeløsningbestemt.differentialligningenerseparabel.dah(t)=/ ( +t 2) er kontinuert på R og da g(x) = x( x) åbenbart er differentiabel med kontinuert differentialkvotient g (x)= 2x på R,går der igennemethvert punkt iplanen R 2 netop én løsning. Vi undersøger først, om differentialligningen har konstante løsninger. Vi skal da løse ligningen g(x)=0, dvs. x( x)=0. Denne ligning har åbenbart løsningerne 0 og. Altså har differentialligningen de to konstante løsninger x = 0 og x =. Vi kan allerede nu sige en hel del om de andre løsningers forløb. Opfylder en løsning x(t) uligheden x(t 0 ) > ( område ) på et tidspunktt 0, såvil den altidhavegjortdet ogvil vedblivemedatgøredet.løsningen kan jo ikke krydse den konstante løsning x = på grund af entydighed af løsninger. Det samme kan siges om en løsning, der opfylder 0<x(t 0 )<( område 2 ) og om en løsning, der opfylder x(t 0 )<0( område3 ).Vikanenddaudfradifferentialligningenafgøremonotoniforholdenefor løsningerne i de 3 områder. I område er x (t)=x(t)( x(t))/ ( +t 2) <0, da x(t)>. Altså er løsningerne i område aftagende. Det samme er løsningerne i område 3, mens løsningerne i område 2 er voksende. Vi bestemmer nu formeludtryk for de løsninger, der ligger i de tre ovennævnte områder. Disse løsninger findes ved separation x( x) = +t 2dt+C hvoraf ln x ln x =arctant+c 8

9 Her er C R en integrationskonstant. Ved sammenskrivning af de to logaritmer fås ln x x =arctant+c hvoreftervifinder x x =exp(arctant+c)=ec e arctant Numerisktegnet kan fjernes mod, at der sættes ± på højresiden: x x =±ec e arctant =Ke arctant hvor vi har sat K = ±e C. Bemærk, at K nødvendigvis må være forskellig fra nul. Vi skal nu løse ligningen x x =u=kearctant Vi finder: Altsåharvi x x =u x=(x )u=xu u xu x=u x= u u x(t)= Kearctant Ke arctant = K K e arctant hvork R\{0}.Hermedharvialtsåfundetenformelfordeløsninger,derbefindersigidetre områder adskilt af de konstante løsninger. Den fuldstændige løsning til differentialligningen består da af disse samt de to konstante løsninger, x=0 og x=. Den første af de konstante løsninger kan inkorporeres i den generelle formelvedalligevelattilladek=0. Hvis begyndelsesbetingelsen x(0) = 2 er givet, finder vi ved indsættelse konstanten K til 2. Altså fås løsningen 2 x(t)= 2 e arctant Løsningens definitionsinterval findes ved at forlange () at nævneren 2 e arctant 0 og (2) att=0er med iintervallet, da det er for dennet-værdi,atbegyndelsesværdiener opgivet.da 2 e arctant =0 t= tan(ln2)fåsdefinitionsintervalletforvoresløsningtil] tan(ln2), [. 9
u=xu u xu x=u x= u u x(t)= Kearctant Ke arctant = K K e arctant hvork R\{0}.")
10 4 3 x(t) t 2 Figur3.Hældningsfeltetforx = x( x) +t 2 sammenmed6løsninger. Eksempel2 Som et eksempel på, at der kan gå to løsninger gennem samme punkt tager vi differentialligningen dt =3x2 3 (7) Vi ser, at x = 0 er en konstant løsning. Ved separation af de variable findes løsningerne x = f(t)=(t+k) 3.Løsningsmetodenkræverf(t)=(t+k) 3 0,mendetsesveddirekteindsættelse i differentialligningen (7), at x=f(t)=(t+k) 3 er løsning for alle t R. Gennem (0,0) går nu foruden den konstante løsning x = 0 også løsningen x = t 3. I virkeligheden er det endnu værre, idet man ved sammenstykning af den konstante løsning med løsningen x = (t+k) 3 i punktett= kkankonstruereuendeligtmangeløsninger,derallegårgennem(0,0).ladnemlig k 0 k 2,ogladf væredenfunktion,derergivetvedfølgendeforskrift (t k ) 3 for t k f(t)= 0 for k <t<k 2 (t k 2 ) 3 for t k 2 såerf løsningtil(7)pår,ogdensgrafgårgennem(0,0).hvisvitilladerk = ogk 2 =, så giver ovenstående forskrift faktisk samtlige løsninger, der går gennem (0, 0). Bemærk, at g(x)=3x 2/3 ikkeerdifferentiabelforx=0(jvnf.bemærkningovenfor). 0
=(t+k) 3 0,mendetsesveddirekteindsættelse i differentialligningen (7), at x=f(t)=(t+k) 3 er løsning for alle t R.")
11 t Figur4.Løsningenmedk =,k 2 =2ogløsningenmedk =k 2 = Lineære differentialligninger af.orden En differentialligning af første orden, der kan skrives på formen a(t)x +b(t)x=c(t) kaldes en lineær differentialligning. På ethvert interval I, hvor a(t) 0, for alle t I, kan ligningen normeres ved division med a(t). Herved opnår differentialligningen følgende form x +p(t)x=q(t), t I Viforudsætteridetfølgende,atbådepogqerkontinuertepåetintervalI. Sætning22 Ladpogq værekontinuertefunktioner defineret på intervallet I.Såer den fuldstændige løsning til x +p(t)x=q(t) (8) givet ved formlen x(t)=e P(t) e P(t) q(t)dt+ce P(t) (9) hvorp erenvilkårligtvalgtstamfunktiontilp,oghvorc Rerenarbitrærkonstant. Bemærkning 23 Vi ser, at enhver løsning til den lineære differentialligning(8) er defineret på hele I. Dette er ofte ikke tilfældet for ikke-lineære differentialligninger. Formlen (9) kaldes ofte for Panserformlen. Bevis.DaperkontinuertpåI,harpenstamfunktionpådetteinterval.LadP væreensådan. Da e P(t) > 0 for alle t I, har differentialligningen (8) de samme løsninger som følgende differentialligning x (t)e P(t) +p(t)e P(t) x(t)=e P(t) q(t) Men venstre side heraf er differentialkvotienten af produktet e P(t) x(t). Dvs. ovenstående kan skrives på formen d ( ) e P(t) x(t) =e P(t) q(t) dt
x=q(t), t I Viforudsætteridetfølgende,atbådepogqerkontinuertepåetintervalI.")
12 Denne differentialligning er imidlertid ensbetydende med, at e P(t) x(t) er en stamfunktion til e P(t) q(t),dvs.ensbetydendemedeksistensenafenkonstantc R,så e P(t) x(t)= e P(t) q(t)dt+c Meddetubestemteintegralbetegnerviherenvilkårligtvalgtstamfunktiontile P(t) q(t).denne sidste ligning er åbenbart ækvivalent med formlen(9). Eksempel 24 Vi vil finde den fuldstændige løsning til differentialligningen x (t)+2x(t)=5sint Ligningen er åbenbart lineær. Den er allerede normeret. Vi bruger Panserformlen(9). Idet p(t) = 2fåsP(t)= 2dt=2t,så x(t)=e 2t e 2t 5sintdt+Ce 2t hvor C er en arbitrær konstant. Ved udregning af integralet fås x(t)=e 2t( 2e 2t sint e 2t cost ) +Ce 2t =2sint cost+ce 2t gældende for alle t R. Vi bemærker, at for store værdier af t ligner alle løsningerne den der svarertilc=0,hvilketogsåfremgåraffigurennedenfor. 4 x(t) t 2 4 Figur5.Hældningsfeltetforx +2x=5sintsammenmed5løsninger. Mest af hensyn til den senere behandling af lineære differentialligninger af højere orden viser vi en generel sætning om strukturen af den fuldstændige løsning til den lineære differentialligning af første orden. Sætning 25 Den fuldstændige løsning til differentialligningen(8) er lig med summen af en partikulærløsning,x p,tilligningenogdenfuldstændigeløsning,x hom,tildentilsvarendehomogene ligning x +p(t)x=0 (0) altsåx=x p +x hom. 2
. Idet p(t) = 2fåsP(t)= 2dt=2t,så x(t)=e 2t e 2t 5sintdt+Ce 2t hvor C er en arbitrær konstant.")
13 Bevis. Vi giver to beviser.. Den fuldstændige løsning til (8) er givet ved Panserformlen (9). Når C = 0 i (9) fås en løsning. Den betegner vi med x p. Det er en partikulær løsning. Formlen (9) gælder selvfølgelig også for det specielle tilfælde, at q(t) = 0 for alle t I. Men så fås den fuldstændigeløsningtildenhomogeneligningtilx hom =Ce P(t).Sætningenfølgernuved atudnyttedenpåvistefortolkningafdetoledi(9). 2. DettebevisudnytterikkePanserformlen(9).Antag,atx p erenløsningtil(8)ogatx h er enløsningtil(0).såerx=x p +x h løsningtil(8),idet (x p +x h ) +p(t)(x p +x h )=x p+x h+p(t)x p +p(t)x h = ( x p+p(t)x p ) +(x h +p(t)x h )=q(t)+0=q(t) Hvisomvendtx ogx 2 beggeerløsningertil(8),såerx=x x 2 løsningtil(0),idet (x x 2 ) +p(t)(x x 2 )=x x 2+p(t)x p(t)x 2 =(x +p(t)x ) (x 2+p(t)x 2 )=q(t) qt0=0 Heraf følger sætningen. Eksempel 26 Differentialligningen tx +2x=te t betragtes for t > 0. Ligningen er åbenbart lineær. Vi normerer først ligningen: x + 2 t x=e t Panserformlens P er givet ved P(t) = 2 t dt = 2lnt, så vi finder, at ep(t) = e 2lnt = t 2 og e P(t) =t 2.Hermederdenfuldstændigeløsninggivetved x(t)=t 2 t 2 e t dt+ct 2 =t 2( t 2 e t 2te t 2e t) +Ct 2 = (+ 2t + 2t ) 2 e t + C t 2 hvorc R.Vikanskrivedenfuldstændigeløsningpåformen x(t)= C ( t 2 +2t+2 ) e t t 2 For C <2 gælder åbenbart, at x(t), og for C >2 gælder,at x(t) for t 0. Hvis C=2erdetikkepåforhåndklart,hvordanx(t)opførersigfort 0.Viharet" 0 0 -problem,på hvilket vi kan bruge l Hospitals regel: (2t+2)e t + ( t 2 +2t+2 ) e t 2t = t2 e t 2t = te t 2 0 fort 0.Detsammegælderaltsåforx(t). 3
,idet (x p +x h ) +p(t)(x p +x h )=x p+x h+p(t)x p +p(t)x h = ( x p+p(t)x p ) +(x h +p(t)x h )=q(t)+0=q(t) Hvisomvendtx ogx 2 beggeerløsningertil(8),såerx=x x 2")
14 0.4 x(t) t Figur6.Hældningsfeltetfortx +2x=te t sammenmed5løsninger. 3 Numerisk løsning af differentialligninger: Eulers metode Da numerisk løsning af differentialligninger i mange tilfælde er en nødvendighed, vil vi her kort behandle en simpel metode til numerisk løsning af et begyndelsesværdiproblem for en differentialligning af første orden. Vi gør det for give en idé om hvad man mener med en numerisk løsning. Vi ønsker at finde en tilnærmet(med et finere ord: approksimativ) løsning af begyndelsesværdiproblemet x (t)=f(t,x(t)), x(t 0 )=x 0 En tilnærmet eller approksimativ løsning betegnes ofte som en numerisk løsning, når resultatet ikke er givet ved en formel, men foreligger som en tabel af konkrete talværdier eller som en procedure,derforenhvergivenkonkrettalværdiaftkanberegnex(t).sombrugther,harordet numerisk intetatgøremedbrugeniudtrykketnumeriskværdiafettal,somi x. Eulers metode er en numerisk metode. Den er opkaldt efter den schweitziske matematiker Leonhard Euler(707-83), der måske er den mest produktive matematiker, der nogensinde har levet.detteskalmandogikkeladesigskræmmeaf.metodenerganskesimpel. Vibegynderidetopgivnepunkt(t 0,x 0 ).Løsningenstangenthældningtilt=t 0 erx (t 0 )= f(t 0,x 0 ).Gårviderforetlilleskridtaflængdenhtilhøjre,erdennyeeksaktex-værditætpå denx-værdi,vifårvedatgålangstangenten.gårvilangstangentenfårvix-værdien Den tilsvarende t-værdi er x =x 0 +hf(t 0,x 0 ) t =t 0 +h Vistårnuipunktet(t,x ).Dettepunktliggerformodentliglidtvedsidenafdetkorrektepunkt, menerdetbedstevihar.idettepunkterløsningenshældningx (t )=f(t,x ).Vigårlangs dennyetangentett-skridtpåh,ogfinderdax-værdien x 2 =x +hf(t,x ) 4
 løsning af begyndelsesværdiproblemet x (t)=f(t,x(t)), x(t 0 )=x 0 En tilnærmet eller approksimativ løsning betegnes ofte som en")
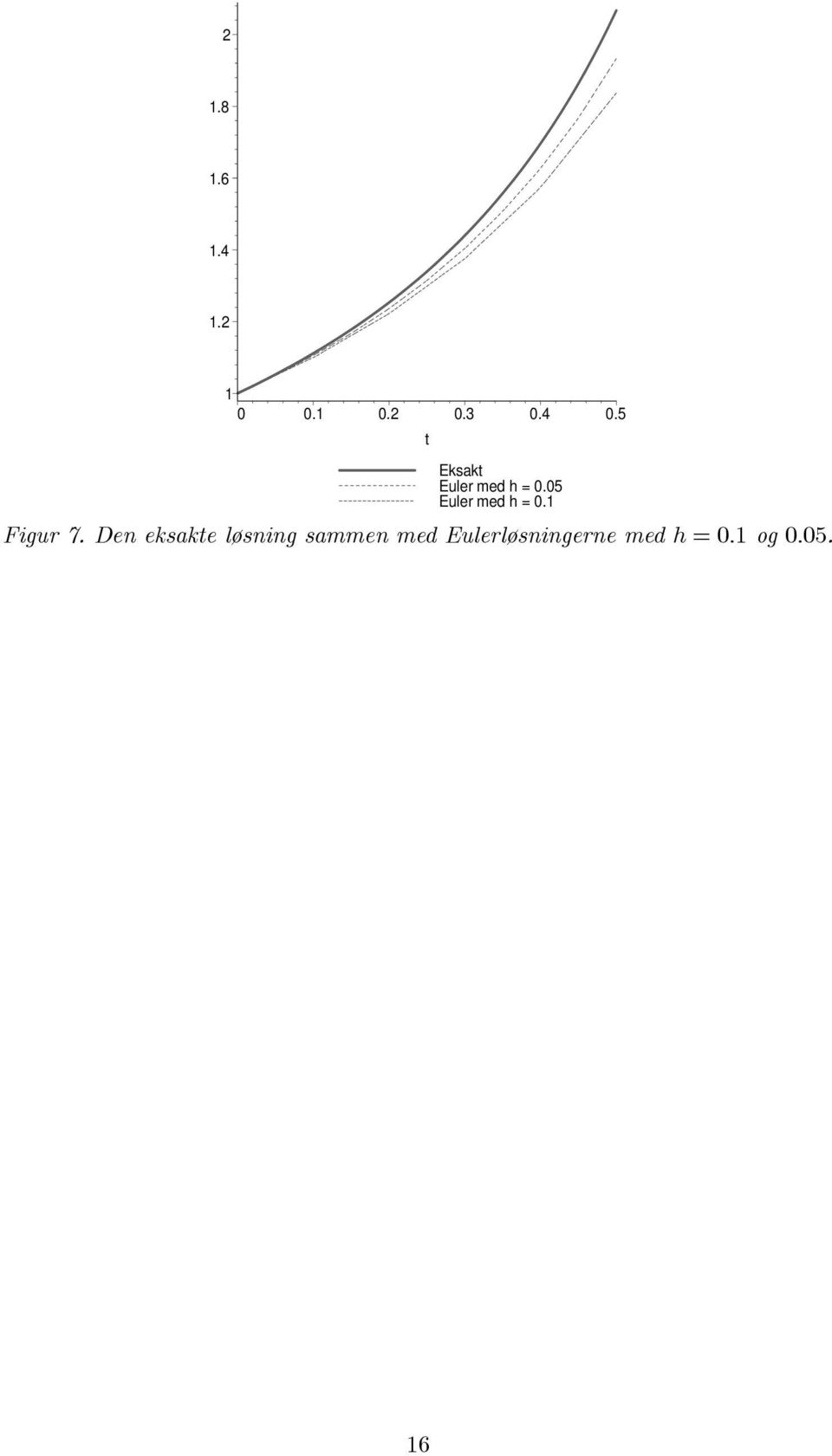
15 svarende til t-værdien Således fortsættes. Vi finder en række punkter der hænger sammen på følgende måde t 2 =t +h (t 0,x 0 ),(t,x ),(t 2,x 2 ),...,(t n,x n ),... x n+ =x n +hf(t n,x n ) t n+ =t n +h forn=0,,2,3,... Detkanvises,atdenfejl,derbegåsvedetenkeltskridterca.proportionalmedh 2.Dentotale fejl ved beregningen af x(b), hvor b er sluttids-punktet, bliver hermed omtrent proportional med h=h.dermedereulersmetodeenførsteordensmetode. Eksempel 27 Som eksempel tager vi begyndelsesværdiproblemet x =t 2 +x 2 x(0)= Vitagerh=0..Viharåbenbartt 0 =0,x 0 =ogf(t,x)=t 2 +x 2.Såvifinderførst Dernæst finder vi x =x 0 +hf(t 0,x 0 )=+0. f(0,)=. t =t 0 +h=0. x 2 =x +hf(t,x )=.+0. f(0.,.)=.222 t 2 =t +h=0.2 Gårvietskridtmere,findervi Hermed har vi tabellen x 3 =x 2 +hf(t 2,x 2 )= f(0.2,.222)=.3753 t 3 =t 2 +h=0.3 t x Hvis vi halverer skridtlængden, dvs. tager h = 0.05, så fås tabellen t x hvor vi kun har medtaget x-værdier svarende til samme t-værdier som før. Halveres igen (h = 0.025) fås: t x I dette eksempel kan den eksakte løsning findes, idet den kan udtrykkes ved såkaldte Besselfunktioner. Men indeholder éns repertoire af funktioner ikke Besselfunktionerne, så kan den eksakte løsning ikke angives. Maple kender Besselfunktionerne og kan finde den eksakte løsning. Den ser kompliceret ud, men løsningen giver følgende tabel(med 5 betydende cifre): t x
= Vitagerh=0..Viharåbenbartt 0 =0,x 0 =ogf(t,x)=t 2 +x 2.Såvifinderførst Dernæst finder vi x =x 0 +hf(t 0,x 0 )=+0. f(0,)=.")
16 t Eksakt Euler med h = 0.05 Euler med h = 0. Figur7.DeneksakteløsningsammenmedEulerløsningernemedh=0.og
Førsteordens lineære differentialligninger
 enote 16 1 enote 16 Førsteordens lineære differentialligninger I denne enote gives først en kort introduktion til differentialligninger i almindelighed, hvorefter hovedemnet er en særlig type af differentialligninger,
enote 16 1 enote 16 Førsteordens lineære differentialligninger I denne enote gives først en kort introduktion til differentialligninger i almindelighed, hvorefter hovedemnet er en særlig type af differentialligninger,
Lineære differentialligningers karakter og lineære 1. ordens differentialligninger
 enote 11 1 enote 11 Lineære differentialligningers karakter og lineære 1. ordens differentialligninger I denne note introduceres lineære differentialligninger, som er en speciel (og bekvem) form for differentialligninger.
enote 11 1 enote 11 Lineære differentialligningers karakter og lineære 1. ordens differentialligninger I denne note introduceres lineære differentialligninger, som er en speciel (og bekvem) form for differentialligninger.
DesignMat Lineære differentialligninger I
 DesignMat Lineære differentialligninger I Preben Alsholm Uge Forår 0 1 Lineære differentialligninger af første orden 1.1 Normeret lineær differentialligning Normeret lineær differentialligning En differentialligning,
DesignMat Lineære differentialligninger I Preben Alsholm Uge Forår 0 1 Lineære differentialligninger af første orden 1.1 Normeret lineær differentialligning Normeret lineær differentialligning En differentialligning,
DesignMat Lineære differentialligninger I
 DesignMat Lineære differentialligninger I Preben Alsholm Uge 9 Forår 2010 1 Lineære differentialligninger af første orden 1.1 Normeret lineær differentialligning Normeret lineær differentialligning En
DesignMat Lineære differentialligninger I Preben Alsholm Uge 9 Forår 2010 1 Lineære differentialligninger af første orden 1.1 Normeret lineær differentialligning Normeret lineær differentialligning En
Matematisk modellering og numeriske metoder
 Matematisk modellering og numeriske metoder Morten Grud Rasmussen 5. september 2016 1 Ordinære differentialligninger ODE er 1.1 ODE er helt grundlæggende Definition 1.1 (Ordinære differentialligninger).
Matematisk modellering og numeriske metoder Morten Grud Rasmussen 5. september 2016 1 Ordinære differentialligninger ODE er 1.1 ODE er helt grundlæggende Definition 1.1 (Ordinære differentialligninger).
Matematisk modellering og numeriske metoder. Lektion 1
 Matematisk modellering og numeriske metoder Lektion 1 Morten Grud Rasmussen 4. september, 2013 1 Ordinære differentialligninger ODE er 1.1 ODE er helt grundlæggende Definition 1.1 (Ordinære differentialligninger).
Matematisk modellering og numeriske metoder Lektion 1 Morten Grud Rasmussen 4. september, 2013 1 Ordinære differentialligninger ODE er 1.1 ODE er helt grundlæggende Definition 1.1 (Ordinære differentialligninger).
Differentialligninger. Ib Michelsen
 Differentialligninger Ib Michelsen Ikast 203 2 Indholdsfortegnelse Indholdsfortegnelse Indholdsfortegnelse...2 Ligninger og løsninger...3 Indledning...3 Lineære differentialligninger af første orden...3
Differentialligninger Ib Michelsen Ikast 203 2 Indholdsfortegnelse Indholdsfortegnelse Indholdsfortegnelse...2 Ligninger og løsninger...3 Indledning...3 Lineære differentialligninger af første orden...3
Introduktion til Laplace transformen (Noter skrevet af Nikolaj Hess-Nielsen sidst revideret marts 2013)
") Introduktion til Laplace transformen (oter skrevet af ikolaj Hess-ielsen sidst revideret marts 23) Integration handler ikke kun om arealer. Tværtimod er integration basis for mange af de vigtigste værktøjer
Introduktion til Laplace transformen (oter skrevet af ikolaj Hess-ielsen sidst revideret marts 23) Integration handler ikke kun om arealer. Tværtimod er integration basis for mange af de vigtigste værktøjer
Mat H /05 Note 2 10/11-04 Gerd Grubb
 Mat H 1 2004/05 Note 2 10/11-04 Gerd Grubb Nødvendige og tilstrækkelige betingelser for ekstremum, konkave og konvekse funktioner. Fremstillingen i Kapitel 13.1 2 af Sydsæters bog [MA1] suppleres her med
Mat H 1 2004/05 Note 2 10/11-04 Gerd Grubb Nødvendige og tilstrækkelige betingelser for ekstremum, konkave og konvekse funktioner. Fremstillingen i Kapitel 13.1 2 af Sydsæters bog [MA1] suppleres her med
Numeriske metoder - til løsning af differentialligninger - fra borgeleo.dk
 Numeriske metoder - til løsning af differentialligninger - fra borgeleo.dk Eksakte løsninger: fuldstændig løsning og partikulær løsning Mange differentialligninger kan løses eksakt. Fx kan differentialligningen
Numeriske metoder - til løsning af differentialligninger - fra borgeleo.dk Eksakte løsninger: fuldstændig løsning og partikulær løsning Mange differentialligninger kan løses eksakt. Fx kan differentialligningen
Projekt 4.9 Bernouillis differentialligning
 Projekt 4.9 Bernouillis differentialligning (Dette projekt dækker læreplanens krav om supplerende stof vedr. differentialligningsmodeller. Projektet hænger godt sammen med projekt 4.0: Fiskerimodeller,
Projekt 4.9 Bernouillis differentialligning (Dette projekt dækker læreplanens krav om supplerende stof vedr. differentialligningsmodeller. Projektet hænger godt sammen med projekt 4.0: Fiskerimodeller,
Projekt 4.6 Løsning af differentialligninger ved separation af de variable
 Projekt 4.6 Løsning af differentialligninger ved separation af de variable Differentialligninger af tpen d hx () hvor hx ()er en kontinuert funktion, er som nævnt blot et stamfunktionsproblem. De løses
Projekt 4.6 Løsning af differentialligninger ved separation af de variable Differentialligninger af tpen d hx () hvor hx ()er en kontinuert funktion, er som nævnt blot et stamfunktionsproblem. De løses
Matematik A. Højere teknisk eksamen. Forberedelsesmateriale. htx112-mat/a-26082011
 Matematik A Højere teknisk eksamen Forberedelsesmateriale htx112-mat/a-26082011 Fredag den 26. august 2011 Forord Forberedelsesmateriale til prøverne i matematik A Der er afsat 10 timer på 2 dage til
Matematik A Højere teknisk eksamen Forberedelsesmateriale htx112-mat/a-26082011 Fredag den 26. august 2011 Forord Forberedelsesmateriale til prøverne i matematik A Der er afsat 10 timer på 2 dage til
Taylorudvikling I. 1 Taylorpolynomier. Preben Alsholm 3. november Definition af Taylorpolynomium
 Taylorudvikling I Preben Alsholm 3. november 008 Taylorpolynomier. Definition af Taylorpolynomium Definition af Taylorpolynomium Givet en funktion f : I R! R og et udviklingspunkt x 0 I. Find et polynomium
Taylorudvikling I Preben Alsholm 3. november 008 Taylorpolynomier. Definition af Taylorpolynomium Definition af Taylorpolynomium Givet en funktion f : I R! R og et udviklingspunkt x 0 I. Find et polynomium
MM501 forelæsningsslides
 MM501 forelæsningsslides uge 40, 2010 Produceret af Hans J. Munkholm bearbejdet af JC 1 Separabel 1. ordens differentialligning En generel 1. ordens differentialligning har formen s.445-8 dx Eksempler
MM501 forelæsningsslides uge 40, 2010 Produceret af Hans J. Munkholm bearbejdet af JC 1 Separabel 1. ordens differentialligning En generel 1. ordens differentialligning har formen s.445-8 dx Eksempler
Eksamen i Calculus. 14. juni f (x, y, z) = 1 + x 2 + y 2. x 2 + y 2 1 Hele rummet uden z aksen
 = 1 + x 2 + y 2. x 2 + y 2 1 Hele rummet uden z aksen") Eksamen i Calculus Første Studieår ved Det Tekniske Fakultet for IT og Design, Det Sundhedsvidenskabelige Fakultet samt Det Ingeniør- og Naturvidenskabelige Fakultet 14. juni 019 Opgave 1 (6 point) En
Eksamen i Calculus Første Studieår ved Det Tekniske Fakultet for IT og Design, Det Sundhedsvidenskabelige Fakultet samt Det Ingeniør- og Naturvidenskabelige Fakultet 14. juni 019 Opgave 1 (6 point) En
af koblede differentialligninger (se Apostol Bind II, s 229ff) 3. En n te ordens differentialligning
 3. En n te ordens differentialligning") EKSISTENS- OG ENTYDIGHEDSSÆTNINGEN Vi vil nu bevise eksistens- og entydighedssætningen for ordinære differentialligninger. For overskuelighedens skyld vil vi indskrænke os til at undersøge een 1. ordens
EKSISTENS- OG ENTYDIGHEDSSÆTNINGEN Vi vil nu bevise eksistens- og entydighedssætningen for ordinære differentialligninger. For overskuelighedens skyld vil vi indskrænke os til at undersøge een 1. ordens
MM501/MM503 forelæsningsslides
 MM501/MM503 forelæsningsslides uge 50, 2009 Produceret af Hans J. Munkholm 1 Separabel 1. ordens differentialligning En generel 1. ordens differentialligning har formen dx Eksempler = et udtryk, der indeholder
MM501/MM503 forelæsningsslides uge 50, 2009 Produceret af Hans J. Munkholm 1 Separabel 1. ordens differentialligning En generel 1. ordens differentialligning har formen dx Eksempler = et udtryk, der indeholder
Den homogene ligning. Vi betragter den n te ordens, homogene, lineære differentialligning. d n y dt n. an 1 + any = 0 (1.2) dt. + a1 d n 1 y dt n 1
 dt. + a1 d n 1 y dt n 1") 1/7 Den homogene ligning Vi betragter den n te ordens, homogene, lineære differentialligning a 0 d n y dt n + a1 d n 1 y dt n 1 hvor a 0,..., a n R og a 0 0. Vi skriver ligningen på kort form som + + dy
1/7 Den homogene ligning Vi betragter den n te ordens, homogene, lineære differentialligning a 0 d n y dt n + a1 d n 1 y dt n 1 hvor a 0,..., a n R og a 0 0. Vi skriver ligningen på kort form som + + dy
PeterSørensen.dk : Differentiation
 PeterSørensen.dk : Differentiation Betydningen af ordet differentialkvotient...2 Sekant...2 Differentiable funktioner...3 Bestemmelse af differentialkvotient i praksis ved opgaveløsning...3 Regneregler:...3
PeterSørensen.dk : Differentiation Betydningen af ordet differentialkvotient...2 Sekant...2 Differentiable funktioner...3 Bestemmelse af differentialkvotient i praksis ved opgaveløsning...3 Regneregler:...3
Lokalt ekstremum DiploMat 01905
 Lokalt ekstremum DiploMat 0905 Preben Alsholm Institut for Matematik, DTU 6. oktober 00 De nition Et stationært punkt for en funktion af ere variable f vil i disse noter blive kaldt et egentligt saddelpunkt,
Lokalt ekstremum DiploMat 0905 Preben Alsholm Institut for Matematik, DTU 6. oktober 00 De nition Et stationært punkt for en funktion af ere variable f vil i disse noter blive kaldt et egentligt saddelpunkt,
Matematisk modellering og numeriske metoder. Lektion 5
 Matematisk modellering og numeriske metoder Lektion 5 Morten Grud Rasmussen 19. september, 2013 1 Euler-Cauchy-ligninger [Bogens afsnit 2.5, side 71] 1.1 De tre typer af Euler-Cauchy-ligninger Efter at
Matematisk modellering og numeriske metoder Lektion 5 Morten Grud Rasmussen 19. september, 2013 1 Euler-Cauchy-ligninger [Bogens afsnit 2.5, side 71] 1.1 De tre typer af Euler-Cauchy-ligninger Efter at
Løsninger til eksamensopgaver på A-niveau 2019 ( ) ( )
 ( )") Løsninger til eksamensopgaver på A-niveau 019 1. maj 019: Delprøven UDEN hjælpemidler 1. maj 019 opgave 1: Man kan godt benytte substitutionsmetoden, lige store koefficienters metode eller determinantmetoden,
Løsninger til eksamensopgaver på A-niveau 019 1. maj 019: Delprøven UDEN hjælpemidler 1. maj 019 opgave 1: Man kan godt benytte substitutionsmetoden, lige store koefficienters metode eller determinantmetoden,
Taylor s approksimationsformler for funktioner af én variabel
 enote 17 1 enote 17 Taylor s approksimationsformler for funktioner af én variabel I enote 14 og enote 16 er det vist hvordan funktioner af én og to variable kan approksimeres med førstegradspolynomier
enote 17 1 enote 17 Taylor s approksimationsformler for funktioner af én variabel I enote 14 og enote 16 er det vist hvordan funktioner af én og to variable kan approksimeres med førstegradspolynomier
DesignMat Uge 1 Repetition af forårets stof
 DesignMat Uge 1 Repetition af forårets stof Preben Alsholm Efterår 008 01 Lineært ligningssystem Lineært ligningssystem Et lineært ligningssystem: a 11 x 1 + a 1 x + + a 1n x n = b 1 a 1 x 1 + a x + +
DesignMat Uge 1 Repetition af forårets stof Preben Alsholm Efterår 008 01 Lineært ligningssystem Lineært ligningssystem Et lineært ligningssystem: a 11 x 1 + a 1 x + + a 1n x n = b 1 a 1 x 1 + a x + +
Lektion 8 Differentialligninger
 Lektion 8 Differentialligninger Implicit differentiation Differentialligninger Separable differentialligninger 0.5 Implicit differentiation 0.4 0.2 0.2 0.4 0.6 0.8 0 0.5 y Vi kan finde måske løse ligningen.5
Lektion 8 Differentialligninger Implicit differentiation Differentialligninger Separable differentialligninger 0.5 Implicit differentiation 0.4 0.2 0.2 0.4 0.6 0.8 0 0.5 y Vi kan finde måske løse ligningen.5
Introduktion til differentialregning 1. Jens Siegstad og Annegrethe Bak
 Introduktion til differentialregning 1 Jens Siegstad og Annegrete Bak 16. juli 2008 1 Indledning I denne note vil vi kort introduktion til differentilregning, idet vi skal bruge teorien i et emne, Matematisk
Introduktion til differentialregning 1 Jens Siegstad og Annegrete Bak 16. juli 2008 1 Indledning I denne note vil vi kort introduktion til differentilregning, idet vi skal bruge teorien i et emne, Matematisk
Noter om Komplekse Vektorrum, Funktionsrum og Differentialligninger LinAlg 2004/05-Version af 16. Dec.
 Noter om Komplekse Vektorrum, Funktionsrum og Differentialligninger LinAlg 2004/05-Version af 16. Dec. 1 Komplekse vektorrum I defininitionen af vektorrum i Afsnit 4.1 i Niels Vigand Pedersen Lineær Algebra
Noter om Komplekse Vektorrum, Funktionsrum og Differentialligninger LinAlg 2004/05-Version af 16. Dec. 1 Komplekse vektorrum I defininitionen af vektorrum i Afsnit 4.1 i Niels Vigand Pedersen Lineær Algebra
Besvarelser til Calculus Ordinær Eksamen Juni 2019
 Besvarelser til Calculus Ordinær Eksamen - 14. Juni 2019 Mikkel Findinge Bemærk, at der kan være sneget sig fejl ind. Kontakt mig endelig, hvis du skulle falde over en sådan. Dette dokument har udelukkende
Besvarelser til Calculus Ordinær Eksamen - 14. Juni 2019 Mikkel Findinge Bemærk, at der kan være sneget sig fejl ind. Kontakt mig endelig, hvis du skulle falde over en sådan. Dette dokument har udelukkende
Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5
![Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5](/thumbs/58/42578746.jpg "Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5") Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5 Nøgleord og begreber Vækstmodel Bevægelsesligninger Retningsfelt Eulers metode Separable ligninger Logistisk ligning Eksponentiel vækst Begyndelsesværdiproblem Calculus
Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.5 Nøgleord og begreber Vækstmodel Bevægelsesligninger Retningsfelt Eulers metode Separable ligninger Logistisk ligning Eksponentiel vækst Begyndelsesværdiproblem Calculus
Differentialregning. Ib Michelsen
 Differentialregning Ib Michelsen Ikast 2012 Forsidebilledet Tredjegradspolynomium i blåt med rød tangent Version: 0.02 (18-09-12) Denne side er (~ 2) Indholdsfortegnelse Introduktion...5 Definition af
Differentialregning Ib Michelsen Ikast 2012 Forsidebilledet Tredjegradspolynomium i blåt med rød tangent Version: 0.02 (18-09-12) Denne side er (~ 2) Indholdsfortegnelse Introduktion...5 Definition af
Indhold. Litteratur 11
 Indhold Forord ii 00-sættet 1 Opgave 1....................................... 1 Spørgsmål (a).................................. 1 Spørgsmål (b).................................. 1 Spørgsmål (c)..................................
Indhold Forord ii 00-sættet 1 Opgave 1....................................... 1 Spørgsmål (a).................................. 1 Spørgsmål (b).................................. 1 Spørgsmål (c)..................................
Mike Vandal Auerbach. Differentialregning (2) (1)
 (1)") Mike Vandal Auerbach Differentialregning f () www.mathematicus.dk Differentialregning. udgave, 208 Disse noter er skrevet til matematikundervisningen på stx A- og B-niveau efter gymnasiereformen 207. Noterne
Mike Vandal Auerbach Differentialregning f () www.mathematicus.dk Differentialregning. udgave, 208 Disse noter er skrevet til matematikundervisningen på stx A- og B-niveau efter gymnasiereformen 207. Noterne
Eksamen i Calculus. 14. juni f (x, y, z) = 1 + x 2 + y 2. Hele rummet uden z aksen
 = 1 + x 2 + y 2. Hele rummet uden z aksen") Eksamen i Calculus Første Studieår ved Det Tekniske Fakultet for IT og Design, Det Sundhedsvidenskabelige Fakultet samt Det Ingeniør- og Naturvidenskabelige Fakultet 14. juni 019 Opgave 1 (6 point) En
Eksamen i Calculus Første Studieår ved Det Tekniske Fakultet for IT og Design, Det Sundhedsvidenskabelige Fakultet samt Det Ingeniør- og Naturvidenskabelige Fakultet 14. juni 019 Opgave 1 (6 point) En
DesignMat Uge 1 Gensyn med forårets stof
 DesignMat Uge 1 Gensyn med forårets stof Preben Alsholm Efterår 2010 1 Hovedpunkter fra forårets pensum 11 Taylorpolynomium Taylorpolynomium Det n te Taylorpolynomium for f med udviklingspunkt x 0 : P
DesignMat Uge 1 Gensyn med forårets stof Preben Alsholm Efterår 2010 1 Hovedpunkter fra forårets pensum 11 Taylorpolynomium Taylorpolynomium Det n te Taylorpolynomium for f med udviklingspunkt x 0 : P
Eksamen i Calculus. 14. juni f (x, y, z) = 1 + x 2 + y 2. x 2 + y 2 1 Hele rummet uden z aksen
 = 1 + x 2 + y 2. x 2 + y 2 1 Hele rummet uden z aksen") Eksamen i Calculus Første Studieår ved Det Tekniske Fakultet for IT og Design, Det Sundhedsvidenskabelige Fakultet samt Det Ingeniør- og Naturvidenskabelige Fakultet 14. juni 19 Opgave 1 (6 point) En funktion
Eksamen i Calculus Første Studieår ved Det Tekniske Fakultet for IT og Design, Det Sundhedsvidenskabelige Fakultet samt Det Ingeniør- og Naturvidenskabelige Fakultet 14. juni 19 Opgave 1 (6 point) En funktion
Lektion ordens lineære differentialligninger
 Lektion 11 1. ordens lineære differentialligninger Lineære differentialligninger Lineære differentialligninger af 1. orden 1. homogene 2. inhomogene Lineære differentialligninger af 1. orden med konstante
Lektion 11 1. ordens lineære differentialligninger Lineære differentialligninger Lineære differentialligninger af 1. orden 1. homogene 2. inhomogene Lineære differentialligninger af 1. orden med konstante
Pointen med Differentiation
 Pointen med Differentiation Frank Nasser 20. april 2011 c 2008-2011. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Bemærk:
Pointen med Differentiation Frank Nasser 20. april 2011 c 2008-2011. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Bemærk:
Eksponentielle sammenhænge
 Eksponentielle sammenhænge 0 1 2 3 4 5 6 7 8 9 10 11 12 13 Indholdsfortegnelse Variabel-sammenhænge... 1 1. Hvad er en eksponentiel sammenhæng?... 2 2. Forklaring med ord af eksponentiel vækst... 2, 6
Eksponentielle sammenhænge 0 1 2 3 4 5 6 7 8 9 10 11 12 13 Indholdsfortegnelse Variabel-sammenhænge... 1 1. Hvad er en eksponentiel sammenhæng?... 2 2. Forklaring med ord af eksponentiel vækst... 2, 6
Newton-Raphsons metode
 Newton-Raphsons metode af John V. Petersen Indhold Indledning: Numerisk analyse og Newton-Raphsons metode... 2 Udlede Newtons iterations formel... 2 Sætning 1 Newtons metode... 4 Eksempel 1 konvergens...
Newton-Raphsons metode af John V. Petersen Indhold Indledning: Numerisk analyse og Newton-Raphsons metode... 2 Udlede Newtons iterations formel... 2 Sætning 1 Newtons metode... 4 Eksempel 1 konvergens...
Modulpakke 3: Lineære Ligningssystemer
 Chapter 4 Modulpakke 3: Lineære Ligningssystemer 4. Homogene systemer I teknikken møder man meget ofte modeller der leder til systemer af koblede differentialligninger. Et eksempel på et sådant system
Chapter 4 Modulpakke 3: Lineære Ligningssystemer 4. Homogene systemer I teknikken møder man meget ofte modeller der leder til systemer af koblede differentialligninger. Et eksempel på et sådant system
Taylor s approksimationsformler for funktioner af én variabel
 enote 4 1 enote 4 Taylor s approksimationsformler for funktioner af én variabel I enote 19 og enote 21 er det vist hvordan funktioner af én og to variable kan approksimeres med førstegradspolynomier i
enote 4 1 enote 4 Taylor s approksimationsformler for funktioner af én variabel I enote 19 og enote 21 er det vist hvordan funktioner af én og to variable kan approksimeres med førstegradspolynomier i
Lineære 1. ordens differentialligningssystemer
 enote enote Lineære ordens differentialligningssystemer Denne enote beskriver ordens differentialligningssystemer og viser, hvordan de kan løses enoten er i forlængelse af enote, der beskriver lineære
enote enote Lineære ordens differentialligningssystemer Denne enote beskriver ordens differentialligningssystemer og viser, hvordan de kan løses enoten er i forlængelse af enote, der beskriver lineære
Lineære 2. ordens differentialligninger med konstante koefficienter
 enote 13 1 enote 13 Lineære 2. ordens differentialligninger med konstante koefficienter I forlængelse af enote 11 og enote 12 om differentialligninger, kommer nu denne enote omkring 2. ordens differentialligninger.
enote 13 1 enote 13 Lineære 2. ordens differentialligninger med konstante koefficienter I forlængelse af enote 11 og enote 12 om differentialligninger, kommer nu denne enote omkring 2. ordens differentialligninger.
Besvarelser til Calculus Ordinær Eksamen Juni 2018
 Besvarelser til Calculus Ordinær Eksamen - 5. Juni 08 Mikkel Findinge Bemærk, at der kan være sneget sig fejl ind. Kontakt mig endelig, hvis du skulle falde over en sådan. Dette dokument har udelukkende
Besvarelser til Calculus Ordinær Eksamen - 5. Juni 08 Mikkel Findinge Bemærk, at der kan være sneget sig fejl ind. Kontakt mig endelig, hvis du skulle falde over en sådan. Dette dokument har udelukkende
Numerisk løsning af differentialligninger
 KU-LIFE; Matemati og modeller 009 Numeris løsning af differentialligninger Thomas Vils Pedersen 1 Numerise metoder Ved numeris analyse forstås tilnærmet, talmæssig løsning af problemer, som ie, eller un
KU-LIFE; Matemati og modeller 009 Numeris løsning af differentialligninger Thomas Vils Pedersen 1 Numerise metoder Ved numeris analyse forstås tilnærmet, talmæssig løsning af problemer, som ie, eller un
DESIGNMAT FORÅR 2012: UGESEDDEL Forberedelse Læs alle opgaverne fra tidligere ugesedler, og læg særlig mærke til dem du har spørgsmål til.
 DESIGNMAT FORÅR 2012: UGESEDDEL 13 INSTITUT FOR MATEMATIK 1. Forberedelse Læs alle opgaverne fra tidligere ugesedler, og læg særlig mærke til dem du har spørgsmål til. 2. Aktiviteter mandag 13 17 2.1.
DESIGNMAT FORÅR 2012: UGESEDDEL 13 INSTITUT FOR MATEMATIK 1. Forberedelse Læs alle opgaverne fra tidligere ugesedler, og læg særlig mærke til dem du har spørgsmål til. 2. Aktiviteter mandag 13 17 2.1.
Eksamen i Mat F, april 2006
 Eksamen i Mat F, april 26 Opgave Lad F være et vektorfelt, givet i retvinklede koordinater som: Udregn F og F: F x F = F x i + F y j + F z k = F y = z 2 F z xz y 2 F = F x + F y + F z = + + x. F = F z
Eksamen i Mat F, april 26 Opgave Lad F være et vektorfelt, givet i retvinklede koordinater som: Udregn F og F: F x F = F x i + F y j + F z k = F y = z 2 F z xz y 2 F = F x + F y + F z = + + x. F = F z
Vektorfelter langs kurver
 enote 25 1 enote 25 Vektorfelter langs kurver I enote 24 dyrkes de indledende overvejelser om vektorfelter. I denne enote vil vi se på vektorfelternes værdier langs kurver og benytte metoder fra enote
enote 25 1 enote 25 Vektorfelter langs kurver I enote 24 dyrkes de indledende overvejelser om vektorfelter. I denne enote vil vi se på vektorfelternes værdier langs kurver og benytte metoder fra enote
MATEMATIK B. Videooversigt
 MATEMATIK B Videooversigt 2. grads ligninger.... 2 CAS værktøj... 3 Differentialregning... 3 Eksamen... 5 Funktionsbegrebet... 5 Integralregning... 5 Statistik... 6 Vilkårlige trekanter... 7 71 videoer.
MATEMATIK B Videooversigt 2. grads ligninger.... 2 CAS værktøj... 3 Differentialregning... 3 Eksamen... 5 Funktionsbegrebet... 5 Integralregning... 5 Statistik... 6 Vilkårlige trekanter... 7 71 videoer.
MM501 forelæsningsslides
 MM501 forelæsningsslides uge 35-del 1, 2010 Redigeret af Jessica Carter efter udgave af Hans J. Munkholm 1 Nogle talmængder s. 4 N = {1,2,3, } omtales som de naturlige tal eller de positive heltal. Z =
MM501 forelæsningsslides uge 35-del 1, 2010 Redigeret af Jessica Carter efter udgave af Hans J. Munkholm 1 Nogle talmængder s. 4 N = {1,2,3, } omtales som de naturlige tal eller de positive heltal. Z =
Nøgleord og begreber. Definition 15.1 Den lineære 1. ordens differentialligning er
 Oversigt [S] 7.3, 7.4, 7.5, 7.6; [LA] 15, 16, 17 Nøgleord og begreber 1. ordens lineær ligning Løsningsmetode August 2002, opgave 7 1. ordens lineært system Løsning ved egenvektor Lille opgave Stor opgave
Oversigt [S] 7.3, 7.4, 7.5, 7.6; [LA] 15, 16, 17 Nøgleord og begreber 1. ordens lineær ligning Løsningsmetode August 2002, opgave 7 1. ordens lineært system Løsning ved egenvektor Lille opgave Stor opgave
Ang. skriftlig matematik B på hf
 Peter Sørensen: 02-04-2012 Ang. skriftlig matematik B på hf Til skriftlig eksamen i matematik B på hf skal man ikke kunne hele pensum. Pensum til skriftlig eksamen kan defineres ved, at opgaverne i opgavehæftet
Peter Sørensen: 02-04-2012 Ang. skriftlig matematik B på hf Til skriftlig eksamen i matematik B på hf skal man ikke kunne hele pensum. Pensum til skriftlig eksamen kan defineres ved, at opgaverne i opgavehæftet
En differentiabel funktion hvis afledte ikke er kontinuert Søren Knudby
 24 En differentiabel funktion hvis afledte ikke er kontinuert Søren Knudby Det er velkendt for de fleste, at differentiabilitet af en reel funktion f medfører kontinuitet af f, mens det modsatte ikke gælder
24 En differentiabel funktion hvis afledte ikke er kontinuert Søren Knudby Det er velkendt for de fleste, at differentiabilitet af en reel funktion f medfører kontinuitet af f, mens det modsatte ikke gælder
Oversigt [S] 7.3, 7.4, 7.5, 7.6; [LA] 15, 16, 17
![Oversigt [S] 7.3, 7.4, 7.5, 7.6; [LA] 15, 16, 17](/thumbs/62/47131431.jpg "Oversigt [S] 7.3, 7.4, 7.5, 7.6; [LA] 15, 16, 17") Oversigt [S] 7.3, 7.4, 7.5, 7.6; [LA] 15, 16, 17 Nøgleord og begreber 1. ordens lineær ligning Løsningsmetode August 2002, opgave 7 1. ordens lineært system Løsning ved egenvektor Lille opgave Stor opgave
Oversigt [S] 7.3, 7.4, 7.5, 7.6; [LA] 15, 16, 17 Nøgleord og begreber 1. ordens lineær ligning Løsningsmetode August 2002, opgave 7 1. ordens lineært system Løsning ved egenvektor Lille opgave Stor opgave
Nøgleord og begreber Eksistens og entydighed Retningsfelt Eulers metode Hastighedsfelt Stabilitet
 Oversigt [S] 7.2, 7.5, 7.6; [LA] 17, 18 Nøgleord og begreber Eksistens og entydighed Retningsfelt Eulers metode Hastighedsfelt Stabilitet Calculus 2-2004 Uge 49.2-1 Ligning og løsning [LA] 17 Generel ligning
Oversigt [S] 7.2, 7.5, 7.6; [LA] 17, 18 Nøgleord og begreber Eksistens og entydighed Retningsfelt Eulers metode Hastighedsfelt Stabilitet Calculus 2-2004 Uge 49.2-1 Ligning og løsning [LA] 17 Generel ligning
Løsninger til eksamensopgaver på A-niveau 2016
 Løsninger til eksamensopgaver på A-niveau 2016 24. maj 2016: Delprøven UDEN hjælpemidler Opgave 1: Da trekanterne er ensvinklede, er forholdene mellem korresponderende linjestykker i de to trekanter det
Løsninger til eksamensopgaver på A-niveau 2016 24. maj 2016: Delprøven UDEN hjælpemidler Opgave 1: Da trekanterne er ensvinklede, er forholdene mellem korresponderende linjestykker i de to trekanter det
MM501 forelæsningsslides
 MM50 forelæsningsslides uge 36, 2009 Produceret af Hans J. Munkholm Nogle talmængder s. 3 N = {, 2, 3, } omtales som de naturlige tal eller de positive heltal. Z = {0, ±, ±2, ±3, } omtales som de hele
MM50 forelæsningsslides uge 36, 2009 Produceret af Hans J. Munkholm Nogle talmængder s. 3 N = {, 2, 3, } omtales som de naturlige tal eller de positive heltal. Z = {0, ±, ±2, ±3, } omtales som de hele
Prøveeksamen i Calculus
 Prøveeksamen i Calculus Første Studieår ved Det Teknisk-Naturvidenskabelige Fakultet og Det Sundhedsvidenskabelige Fakultet Marts 6 Dette eksamenssæt består af 9 nummererede sider med 4 afkrydsningsopgaver.
Prøveeksamen i Calculus Første Studieår ved Det Teknisk-Naturvidenskabelige Fakultet og Det Sundhedsvidenskabelige Fakultet Marts 6 Dette eksamenssæt består af 9 nummererede sider med 4 afkrydsningsopgaver.
Pointen med Funktioner
 Pointen med Funktioner Frank Nasser 0. april 0 c 0080. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Bemærk: Dette er en
Pointen med Funktioner Frank Nasser 0. april 0 c 0080. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Bemærk: Dette er en
Højere Teknisk Eksamen maj 2008. Matematik A. Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING. Undervisningsministeriet
 Højere Teknisk Eksamen maj 2008 HTX081-MAA Matematik A Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING Undervisningsministeriet Fra onsdag den 28. maj til torsdag den 29. maj 2008 Forord
Højere Teknisk Eksamen maj 2008 HTX081-MAA Matematik A Forberedelsesmateriale til 5 timers skriftlig prøve NY ORDNING Undervisningsministeriet Fra onsdag den 28. maj til torsdag den 29. maj 2008 Forord
Fri vækstmodel t tid og P (t) kvantitet. dp dt = kp Løsninger P (t) = Ce kt C fastlægges ved en begyndelsesværdi. Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.
![Fri vækstmodel t tid og P (t) kvantitet. dp dt = kp Løsninger P (t) = Ce kt C fastlægges ved en begyndelsesværdi. Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.](/thumbs/56/38544107.jpg "Fri vækstmodel t tid og P (t) kvantitet. dp dt = kp Løsninger P (t) = Ce kt C fastlægges ved en begyndelsesværdi. Oversigt [S] 7.1, 7.2, 7.3, 7.4, 7.") Oversigt [S] 7., 7.2, 7.3, 7.4, 7.5 Nøgleord og begreber Vækstmodel Bevægelsesligninger Retningsfelt Separable ligninger Logistisk ligning Eksponentiel vækst Begyndelsesværdiproblem Calculus - 2006 Uge
Oversigt [S] 7., 7.2, 7.3, 7.4, 7.5 Nøgleord og begreber Vækstmodel Bevægelsesligninger Retningsfelt Separable ligninger Logistisk ligning Eksponentiel vækst Begyndelsesværdiproblem Calculus - 2006 Uge
DOK-facitliste DOK. DOK-facitliste 1
 -facitliste 1 -facitliste Listens numre refererer til samlingen af supplerede -opgaver (de gamle eksamensopgaver. På listen står næsten kun facitter, og ikke tilstrækkelige svar på opgaverne. [Korrigeret
-facitliste 1 -facitliste Listens numre refererer til samlingen af supplerede -opgaver (de gamle eksamensopgaver. På listen står næsten kun facitter, og ikke tilstrækkelige svar på opgaverne. [Korrigeret
DIFFERENTIALLIGNINGER
 Preben Alsholm DIFFERENTIALLIGNINGER I KEMI OG ØKOLOGI Danmarks Ingeniørakademi, Kemiafdelingen, 1993. FORORD Denne bog er skrevet for studerende med interesse for matematisk ræsonnement. Den kvalitative
Preben Alsholm DIFFERENTIALLIGNINGER I KEMI OG ØKOLOGI Danmarks Ingeniørakademi, Kemiafdelingen, 1993. FORORD Denne bog er skrevet for studerende med interesse for matematisk ræsonnement. Den kvalitative
Gamle eksamensopgaver (DOK)
") EO 1 Gamle eksamensopgaver ) Opgave 1. sommer 1994, opgave 1) a) Find den fuldstændige løsning til differentialligningen x 6x + 9x =. b) Find den fuldstændige løsning til differentialligningen Opgave 2.
EO 1 Gamle eksamensopgaver ) Opgave 1. sommer 1994, opgave 1) a) Find den fuldstændige løsning til differentialligningen x 6x + 9x =. b) Find den fuldstændige løsning til differentialligningen Opgave 2.
matx.dk Enkle modeller
 matx.dk Enkle modeller Dennis Pipenbring 28. juni 2011 Indhold 1 Indledning 4 2 Funktionsbegrebet 4 3 Lineære funktioner 8 3.1 Bestemmelse af funktionsværdien................. 9 3.2 Grafen for en lineær
matx.dk Enkle modeller Dennis Pipenbring 28. juni 2011 Indhold 1 Indledning 4 2 Funktionsbegrebet 4 3 Lineære funktioner 8 3.1 Bestemmelse af funktionsværdien................. 9 3.2 Grafen for en lineær
To find the English version of the exam, please read from the other end! Eksamen i Calculus
 To find the English version of the exam, please read from the other end! Se venligst bort fra den engelske version på bagsiden hvis du følger denne danske version af prøven. Eksamen i Calculus Første Studieår
To find the English version of the exam, please read from the other end! Se venligst bort fra den engelske version på bagsiden hvis du følger denne danske version af prøven. Eksamen i Calculus Første Studieår
Oversigt [S] 7.2, 7.5, 7.6; [LA] 18, 19
![Oversigt [S] 7.2, 7.5, 7.6; [LA] 18, 19](/thumbs/63/49989105.jpg "Oversigt [S] 7.2, 7.5, 7.6; [LA] 18, 19") Oversigt [S] 7.2, 7.5, 7.6; [LA] 18, 19 Nøgleord og begreber Eksistens og entydighed Elementære funktioner Eksponential af matrix Retningsfelt Eulers metode Hastighedsfelt for system Eulers metode for
Oversigt [S] 7.2, 7.5, 7.6; [LA] 18, 19 Nøgleord og begreber Eksistens og entydighed Elementære funktioner Eksponential af matrix Retningsfelt Eulers metode Hastighedsfelt for system Eulers metode for
Oversigt [S] 7.3, 7.4, 7.5, 7.6; [DL] 1, 2
![Oversigt [S] 7.3, 7.4, 7.5, 7.6; [DL] 1, 2](/thumbs/82/86922880.jpg "Oversigt [S] 7.3, 7.4, 7.5, 7.6; [DL] 1, 2") Oversigt [S] 7.3, 7.4, 7.5, 7.6; [DL] 1, 2 Her skal du lære om Separable ligninger Logistisk ligning og eksponentiel vækst 1. ordens lineær ligning August 2002, opgave 7 Rovdyr-Byttedyr system 1. ordens
Oversigt [S] 7.3, 7.4, 7.5, 7.6; [DL] 1, 2 Her skal du lære om Separable ligninger Logistisk ligning og eksponentiel vækst 1. ordens lineær ligning August 2002, opgave 7 Rovdyr-Byttedyr system 1. ordens
Noter til Perspektiver i Matematikken
 Noter til Perspektiver i Matematikken Henrik Stetkær 25. august 2003 1 Indledning I dette kursus (Perspektiver i Matematikken) skal vi studere de hele tal og deres egenskaber. Vi lader Z betegne mængden
Noter til Perspektiver i Matematikken Henrik Stetkær 25. august 2003 1 Indledning I dette kursus (Perspektiver i Matematikken) skal vi studere de hele tal og deres egenskaber. Vi lader Z betegne mængden
Projekt 2.2 Omvendt funktion og differentiation af omvendt funktion
 ISBN 978877664974 Projekter: Kapitel. Projekt. Omvendt funktion og differentiation af omvendt funktion Projekt. Omvendt funktion og differentiation af omvendt funktion Vi har i Bbogens kapitel 4 afsnit
ISBN 978877664974 Projekter: Kapitel. Projekt. Omvendt funktion og differentiation af omvendt funktion Projekt. Omvendt funktion og differentiation af omvendt funktion Vi har i Bbogens kapitel 4 afsnit
Analyse 1, Prøve 2 Besvarelse
 Københavns Universitet Prøve ved Det naturvidenskabelige Fakultet maj Analyse, Prøve Besvarelse Opgave (3%) (a) (%) Bestem mængden af x R for hvilke rækken ( + (x) n ) er konvergent og angiv sumfunktionen
Københavns Universitet Prøve ved Det naturvidenskabelige Fakultet maj Analyse, Prøve Besvarelse Opgave (3%) (a) (%) Bestem mængden af x R for hvilke rækken ( + (x) n ) er konvergent og angiv sumfunktionen
MATEMATIK 11 Eksamensopgaver Juni 1995 Juni 2001, 4. fjerdedel
 Juni 2000 MATEMATIK 11 Eksamensopgaver Juni 1995 Juni 2001, 4. fjerdedel Opgave 1. (a) Find den fuldstændige løsning til differentialligningen y 8y + 16y = 0. (b) Find den fuldstændige løsning til differentialligningen
Juni 2000 MATEMATIK 11 Eksamensopgaver Juni 1995 Juni 2001, 4. fjerdedel Opgave 1. (a) Find den fuldstændige løsning til differentialligningen y 8y + 16y = 0. (b) Find den fuldstændige løsning til differentialligningen
Hans J. Munkholm: En besvarelse af
 Hans J. Munkholm: En besvarelse af Projekt for MM501, Lineære differentialligninger November-december 2009 Nummererede formler fra opgaveformuleringen Her samles alle opgavens differentialligninger og
Hans J. Munkholm: En besvarelse af Projekt for MM501, Lineære differentialligninger November-december 2009 Nummererede formler fra opgaveformuleringen Her samles alle opgavens differentialligninger og
Funktionsterminologi
 Funktionsterminologi Frank Villa 17. januar 2014 Dette dokument er en del af MatBog.dk 2008-2012. IT Teaching Tools. ISBN-13: 978-87-92775-00-9. Se yderligere betingelser for brug her. Indhold 1 Introduktion
Funktionsterminologi Frank Villa 17. januar 2014 Dette dokument er en del af MatBog.dk 2008-2012. IT Teaching Tools. ISBN-13: 978-87-92775-00-9. Se yderligere betingelser for brug her. Indhold 1 Introduktion
Differentialligninger med TI-Interactive!
 Differentialligninger med TI-Interactive! Jan Leffers (2008) Indholdsfortegnelse Indholdsfortegnelse...3 1. ordens differentialligninger... 4 Den fuldstændige løsning... 4 Løsning med bibetingelse...4
Differentialligninger med TI-Interactive! Jan Leffers (2008) Indholdsfortegnelse Indholdsfortegnelse...3 1. ordens differentialligninger... 4 Den fuldstændige løsning... 4 Løsning med bibetingelse...4
Eksamen i Mat F, april 2006
 Eksamen i Mat F, april 26 Opgave 1 Lad F være et vektorfelt, givet i retvinklede koordinater som: F x x F = F x i + F y j + F z k = F y = 2z F z y Udregn F og F: F = F x + F y + F z = 1 + +. F = F z F
Eksamen i Mat F, april 26 Opgave 1 Lad F være et vektorfelt, givet i retvinklede koordinater som: F x x F = F x i + F y j + F z k = F y = 2z F z y Udregn F og F: F = F x + F y + F z = 1 + +. F = F z F
Nøgleord og begreber Eksistens og entydighed Retningsfelt Eulers metode Hastighedsfelt Stabilitet
 Oversigt [S] 7.2, 7.5, 7.6; [LA] 17, 18 Nøgleord og begreber Eksistens og entydighed Retningsfelt Eulers metode Hastighedsfelt Stabilitet Calculus 2-2005 Uge 49.2-1 Ligning og løsning [LA] 17 Generel ligning
Oversigt [S] 7.2, 7.5, 7.6; [LA] 17, 18 Nøgleord og begreber Eksistens og entydighed Retningsfelt Eulers metode Hastighedsfelt Stabilitet Calculus 2-2005 Uge 49.2-1 Ligning og løsning [LA] 17 Generel ligning
MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver i matematik, 2012 Differentialligninger
 MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver i matematik, 2012 Differentialligninger 2016 MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver
MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver i matematik, 2012 Differentialligninger 2016 MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver
Differentiation af sammensatte funktioner
 1/7 Differentiation af sammensatte funktioner - Fra www.borgeleo.dk En sammensat funktion af den variable x er en funktion, vor x først indsættes i den såkaldte indre funktion. Resultatet fra den indre
1/7 Differentiation af sammensatte funktioner - Fra www.borgeleo.dk En sammensat funktion af den variable x er en funktion, vor x først indsættes i den såkaldte indre funktion. Resultatet fra den indre
Lotka-Volterra modellen
 Lotka-Volterra modellen G4-105 Matematik Aalborg Universitet 20. december 2016 School of Engineering and Science Fredrik Bajers Vej 7G 9220 Aalborg Øst www.ses.aau.dk Titel: Lotka-Volterra modellen Tema:
Lotka-Volterra modellen G4-105 Matematik Aalborg Universitet 20. december 2016 School of Engineering and Science Fredrik Bajers Vej 7G 9220 Aalborg Øst www.ses.aau.dk Titel: Lotka-Volterra modellen Tema:
Funktion af flere variable
 Funktion af flere variable Preben Alsolm 24. april 2008 1 Funktion af flere variable 1.1 Differentiabilitet for funktion af én variabel Differentiabilitet for funktion af én variabel f kaldes differentiabel
Funktion af flere variable Preben Alsolm 24. april 2008 1 Funktion af flere variable 1.1 Differentiabilitet for funktion af én variabel Differentiabilitet for funktion af én variabel f kaldes differentiabel
Mujtaba og Farid Integralregning 06-08-2011
 Indholdsfortegnelse Integral regning:... 2 Ubestemt integral:... 2 Integrationsprøven:... 3 1) Integration af potensfunktioner:... 3 2) Integration af sum og Differens:... 3 3) Integration ved Multiplikation
Indholdsfortegnelse Integral regning:... 2 Ubestemt integral:... 2 Integrationsprøven:... 3 1) Integration af potensfunktioner:... 3 2) Integration af sum og Differens:... 3 3) Integration ved Multiplikation
Lineære 1. ordens differentialligningssystemer
 enote 7 enote 7 Lineære ordens differentialligningssystemer Denne enote beskriver ordens differentialligningssystemer og viser, hvordan de kan løses Der bruges egenværdier og egenvektorer i løsningsproceduren,
enote 7 enote 7 Lineære ordens differentialligningssystemer Denne enote beskriver ordens differentialligningssystemer og viser, hvordan de kan løses Der bruges egenværdier og egenvektorer i løsningsproceduren,
Elementær Matematik. Mængder og udsagn
 Elementær Matematik Mængder og udsagn Ole Witt-Hansen 2011 Indhold 1. Mængder...1 1.1 Intervaller...4 2. Matematisk Logik. Udsagnslogik...5 3. Åbne udsagn...9 Mængder og Udsagn 1 1. Mængder En mængde er
Elementær Matematik Mængder og udsagn Ole Witt-Hansen 2011 Indhold 1. Mængder...1 1.1 Intervaller...4 2. Matematisk Logik. Udsagnslogik...5 3. Åbne udsagn...9 Mængder og Udsagn 1 1. Mængder En mængde er
Besvarelses forslag til Tag-hjemeksamen Vinteren 02 03
 IMFUFA Carsten Lunde Petersen Besvarelses forslag til Tag-hjemeksamen Vinteren 02 0 Hvor ikke andet er angivet er henvisninger til W.R.Wade An Introduction to analysis. Opgave a) Idet udtrykket e x2 cos
IMFUFA Carsten Lunde Petersen Besvarelses forslag til Tag-hjemeksamen Vinteren 02 0 Hvor ikke andet er angivet er henvisninger til W.R.Wade An Introduction to analysis. Opgave a) Idet udtrykket e x2 cos
Besvarelser til Calculus Ordinær eksamen - Forår - 6. Juni 2016
 Besvarelser til Calculus Ordinær eksamen - Forår - 6. Juni 16 Mikkel Findinge Bemærk, at der kan være sneget sig fejl ind. Kontakt mig endelig, hvis du skulle falde over en sådan. Dette dokument har udelukkende
Besvarelser til Calculus Ordinær eksamen - Forår - 6. Juni 16 Mikkel Findinge Bemærk, at der kan være sneget sig fejl ind. Kontakt mig endelig, hvis du skulle falde over en sådan. Dette dokument har udelukkende
Undervisningsbeskrivelse
 Undervisningsbeskrivelse Stamoplysninger til brug ved prøver til gymnasiale uddannelser Termin Som 2015 Institution VUC Vest Uddannelse Fag og niveau Lærer(e) Hold Hf/hfe Mat B Niels Johansson 14MACB11E14
Undervisningsbeskrivelse Stamoplysninger til brug ved prøver til gymnasiale uddannelser Termin Som 2015 Institution VUC Vest Uddannelse Fag og niveau Lærer(e) Hold Hf/hfe Mat B Niels Johansson 14MACB11E14
Integralregning Infinitesimalregning
 Udgave 2.1 Integralregning Infinitesimalregning Noterne gennemgår begreberne integral og stamfunktion, og anskuer dette som et redskab til bestemmelse af arealer under funktioner. Noterne er supplement
Udgave 2.1 Integralregning Infinitesimalregning Noterne gennemgår begreberne integral og stamfunktion, og anskuer dette som et redskab til bestemmelse af arealer under funktioner. Noterne er supplement
Differential- ligninger
 Differential- ligninger Et oplæg 2007 Karsten Juul Dette hæfte er tænkt brugt som et oplæg der kan gennemgås før man går i gang med en lærebogs fremstilling af emnet differentialligninger Læreren skal
Differential- ligninger Et oplæg 2007 Karsten Juul Dette hæfte er tænkt brugt som et oplæg der kan gennemgås før man går i gang med en lærebogs fremstilling af emnet differentialligninger Læreren skal
Oversigt [S] 4.5, 5.10
![Oversigt [S] 4.5, 5.10](/thumbs/20/426063.jpg "Oversigt [S] 4.5, 5.10") Oversigt [S] 4.5, 5.0 Nøgleord og begreber Ubestemte udtryk l Hospitals regel l Hospitals regel 2 Test l Hospitals regel Uegentlige integraler Test uegentlige integraler Uegentlige integraler 2 Test uegentlige
Oversigt [S] 4.5, 5.0 Nøgleord og begreber Ubestemte udtryk l Hospitals regel l Hospitals regel 2 Test l Hospitals regel Uegentlige integraler Test uegentlige integraler Uegentlige integraler 2 Test uegentlige
Kapitel 3 Lineære sammenhænge
 Matematik C (må anvendes på Ørestad Gymnasium) Lineære sammenhænge Det sker tit, at man har flere variable, der beskriver en situation, og at der en sammenhæng mellem de variable. Enhver formel er faktisk
Matematik C (må anvendes på Ørestad Gymnasium) Lineære sammenhænge Det sker tit, at man har flere variable, der beskriver en situation, og at der en sammenhæng mellem de variable. Enhver formel er faktisk
[PJ] QuickGuide.dfw QuickGuide
![[PJ] QuickGuide.dfw QuickGuide](/thumbs/62/47343789.jpg "[PJ] QuickGuide.dfw QuickGuide") [PJ] QuickGuide.dfw 07-04-003 QuickGuide Derives resultater Husk at Derive angiver decimalbrøker uden at forhøje sidste ciffer. Så når du udregner fx /3 får du 0.66666 og ikke 0.66667. Du kan altså ikke
[PJ] QuickGuide.dfw 07-04-003 QuickGuide Derives resultater Husk at Derive angiver decimalbrøker uden at forhøje sidste ciffer. Så når du udregner fx /3 får du 0.66666 og ikke 0.66667. Du kan altså ikke
Euklids algoritme og kædebrøker
 Euklids algoritme og kædebrøker Michael Knudsen I denne note vil vi med Z, Q og R betegne mængden af henholdsvis de hele, de rationale og de reelle tal. Altså er { m } Z = {..., 2,, 0,, 2,...} og Q = n
Euklids algoritme og kædebrøker Michael Knudsen I denne note vil vi med Z, Q og R betegne mængden af henholdsvis de hele, de rationale og de reelle tal. Altså er { m } Z = {..., 2,, 0,, 2,...} og Q = n
MATEMATIK A-NIVEAU. Kapitel 1
 MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver i matematik, 01 Kapitel 1 016 MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver i matematik 01
MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver i matematik, 01 Kapitel 1 016 MATEMATIK A-NIVEAU Vejledende eksempler på eksamensopgaver og eksamensopgaver i matematik 01
Matematisk modellering og numeriske metoder. Lektion 11
 Matematisk modellering og numeriske metoder Lektion 11 Morten Grud Rasmussen 17. oktober, 2013 1 Partielle differentialligninger 1.1 D Alemberts løsning af bølgeligningen [Bogens sektion 12.4 på side 553]
Matematisk modellering og numeriske metoder Lektion 11 Morten Grud Rasmussen 17. oktober, 2013 1 Partielle differentialligninger 1.1 D Alemberts løsning af bølgeligningen [Bogens sektion 12.4 på side 553]
Matematisk modellering og numeriske metoder. Lektion 10
 Matematisk modellering og numeriske metoder Lektion 10 Morten Grud Rasmussen 2. november 2016 1 Partielle differentialligninger 1.1 Det grundlæggende om PDE er Definition 1.1 Partielle differentialligninger
Matematisk modellering og numeriske metoder Lektion 10 Morten Grud Rasmussen 2. november 2016 1 Partielle differentialligninger 1.1 Det grundlæggende om PDE er Definition 1.1 Partielle differentialligninger
[FUNKTIONER] Hvornår kan vi kalde en sammenhæng en funktion, og hvilke egenskaber har disse i givet fald. Vers. 2.0
![[FUNKTIONER] Hvornår kan vi kalde en sammenhæng en funktion, og hvilke egenskaber har disse i givet fald. Vers. 2.0](/thumbs/48/24857099.jpg "[FUNKTIONER] Hvornår kan vi kalde en sammenhæng en funktion, og hvilke egenskaber har disse i givet fald. Vers. 2.0") MaB Sct. Knud Gymnasium, Henrik S. Hansen % [FUNKTIONER] Hvornår kan vi kalde en sammenhæng en funktion, og hvilke egenskaber har disse i givet fald. Vers..0 Indhold Funktioner... Entydighed... Injektiv...
MaB Sct. Knud Gymnasium, Henrik S. Hansen % [FUNKTIONER] Hvornår kan vi kalde en sammenhæng en funktion, og hvilke egenskaber har disse i givet fald. Vers..0 Indhold Funktioner... Entydighed... Injektiv...
Funktionsterminologi
 Funktionsterminologi Frank Nasser 12. april 2011 c 2008-2011. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Bemærk: Dette
Funktionsterminologi Frank Nasser 12. april 2011 c 2008-2011. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Bemærk: Dette
Formler, ligninger, funktioner og grafer
 Formler, ligninger, funktioner og grafer Omskrivning af formler, funktioner og ligninger... 1 Grafisk løsning af ligningssystemer... 1 To ligninger med to ubekendte beregning af løsninger... 15 Formler,
Formler, ligninger, funktioner og grafer Omskrivning af formler, funktioner og ligninger... 1 Grafisk løsning af ligningssystemer... 1 To ligninger med to ubekendte beregning af løsninger... 15 Formler,