Detaljeret Opmåling. af Lautrupvang 2, 2A og 2B. Gruppe 2: Casper Aagaard Madsen og Nikolaj Ahlberg Purhus. Landinspektørstudiet, 4. semester 2.
|
|
|
- Ida Henningsen
- 7 år siden
- Visninger:
Transkript
1 Detaljeret Opåling af Lautrupvang 2, 2A og 2B Gruppe 2: Casper Aagaard Madsen og Nikolaj Ahlberg Purhus Landinspektørstudiet, 4. seester 2. del Aalborg Universitet København

2 Aalborg Universitet København Seester: 4. seester - 2. del Projekttitel: Detaljeret opåling af Lautrupvang 2,2A og 2B Projektperiode: 16. april juni Aalborg Universitet København Lautrupvang 1A, 2750 Ballerup Sekretær: Pia Skovlund Jensen Tlf.: psj@staff.aau.dk Seestertea: Detaljeret opåling Vejleder: Karsten Jensen & Carsten Bech Gruppe nr.: 2 Gruppeedleer: Casper Aagaard Madsen Nikolaj Alhberg Purhus Antal kopier: 4 Resue: Denne projektrapport ohandler udførelse og beregningsetoder for hvordan an koer fra kendte højdefikspunkter til at kunne tegne en 3D odellering af en bygning. Der er genneført geoetrisk nivelleent, trigonoetrisk nivelleent og polygonåling ed dertilhørende fejlteori. På baggrund af disse beregnede højdepunkter er der udført polær detailopåling af Lautrupvang. Hertil knytter sig også etode og fejlteori. Alle beregninger er udført ved brug af TMK, og herfra er det uligt at konverteret detailålings data til brug i tegneprograet AutoCAD. Heri er der tegnet en teknisk kort over det udvalgte oråde, hvorefter der er udforet en 3D trådodel over bygningen beliggende op grunden. Alle data og nøjagtigheden af kortet er beregnet og vurderet, hvilket i sidste ende fører til et tilfredsstillende resultat. Antal sider i rapport: 32 Antal sider i alt: 112 Afleveres:
3 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Forord Denne rapport er udarbejdet so besvarelse til Aalborg Universitets Landinspektøruddannelsens 4. seester - 2. del på Det Teknisk-Naturvidenskabelige Fakultet. Projektet løber over perioden 16. april til 22. juni, og er udarbejdet so besvarelse på projekttitlen Detaljeret Opåling. I projektet er der udarbejdet et teknisk kort og en 3D visualisering af et indre afgrænset oråde i Lautrupparken. Rapporten skildrer hvordan dette bliver udforet helt fra bunden igenne følgende trin: - Geoetrisk nivelleent - Trigonoetrisk nivelleent - Polygon beregning - Detailpunktsåling For alle trin gælder at der har ligget planlægning og nøje overvejelser bag. Derudover bliver disse etoders fejlteori beregnet og behandlet for at opnå indsigt i den praktiske del ed planlægning og opåling, og den teoretiske del okring fejlteori. Igenne kurserne Landåling og Kortkonstruktion og Landålingens Fejlteori og Det Mateatiske Grundlag for Kortprojektioner har vi haft forskellige forelæsninger, der har givet viden til udarbejdelsen af projektrapporten. Prograerne der benyttes til udarbejdelsen af projektet er TMK, so benyttes til beregning af koordinater og andre landinspektør faglige udregninger, sat AutoCAD, der bruges til udforningen af det tekniske kort, og til odellering af 3D trådodellen. Til notering af kilder er Harvard etoden anvendt. Side 1 af 32
4 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Indholdsfortegnelse 1. Indledning Kontrol af udstyr Kontrol af nivelleringsudstyr, Leica Sprinter 150M Kontrol af totalstation, Leica TC Netåling Geoetrisk nivelleent Planlægning af nivelleent Fejlteori og -grænser Trigonoetrisk nivelleent Fejlteori og -grænser ved trigonoetrisk nivelleent Polygonåling Fejlteori og -grænser ved trigonoetrisk nivelleent Detailåling Fejlgrænser og vurdering af detailåling Vurdering af de frie opstillinger Vurdering af kontrolpunkter Frestilling af teknisk kort sat 3D visualisering Vurdering af bygningsdiensioner Kontrol af kortets nøjagtighed Konklusion og diskussion Litteraturliste Bilag oversigt under indledning. 33 Side 2 af 32

5 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 1. Indledning Teaet er detaljeret opåling og ålet er tegningen af et teknisk kort sat frestillingen af en 3D visualisering af en eller flere bygninger i et på forhånd givet oråde. Der er ved projektets opstart blevet udpeget et projektoråde af vejlederne, so skal danne grundlag for detailopålingen, so igen skal danne grundlag for tegningen af det tekniske kort. Orådet ligger i Lautrupvang og ogrænser Lautrupvang 2 og 2B. Orådet afgrænses af vejene Lautrupvang og Lautrupparken ens hhv. en sti og et buskads afgrænser de andre sider. Orådet ses herunder. Der bliver i dette projekt ikke arbejdet ed en egentlig probleforulering en deriod en konkret opgave: At frestille et teknisk kort ed højdeinforationer over et tæt bebygget, stærkt trafikeret oråde. Kortet skal beskrive såvel orådets topografi so en lang række tekniske detaljer. Kortet skal kunne anvendes i en kounes tekniske forvaltning i forbindelse ed sanerings- eller renoveringsopgave eller større byggeprojekt. (Studievejledning, 2012, s. 3). Jf. Specifikationer for tekniske kort - TK99 (AUC, 1999) skal et sådan kort i ålforholdet 1:200 være ed 5 c. nøjagtighed i planen og 7.5 c. i højden. Side 3 af 32
6 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Projektet er delt op i flere etaper. Første etape er kontrol af det benyttede udstyr til de forskellige opålinger. Dernæst skal ålingerne planlægges og genneføres, hvilket fx vil sige at der skal etableres en polygon i orådet af fysiske hjælpepunkter. Denne polygon bliver dernæst indålt ed forskellige typer opåling; geoetrisk nivelleent, trigonoetrisk nivelleent sat polygonåling, hvorefter den skal danne grundlag for detailålingen af orådet. Alle disse opålinger bliver løbende beregnet og vurderet i forlængelse af hvert afsnit. Til sidst bliver processen for frestillingen af det tekniske kort og 3D odellen gennegået, hvorefter en vurdering og kontrol af det tekniske kort finder sted. I forbindelse ed projektet er der udarbejdet en lang række bilag. I rapporten bliver der flere gange henvist til et bestet bilag, og her er en liste over vedlagte bilag: A. Målebog denne er fysisk afleveret B. CD ed indhold af vigtige dokuenter og filer C. Udskrift af observations- og dokuentationsfiler fra TMK D. Udtegning af teknisk kort E. Udtegning af 3D-trådodel F. Kort ed 20 kontrolafstande G. Vurdering af kontrolpunkter Side 4 af 32
7 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 2. Kontrol af udstyr Inden de forskellige opålinger af projektorådet kan påbegyndes, er det nødvendigt at kontrollere det udleverede udstyr for at sikre, at det ikke lider under nogen for for systeatiske fejl eller forkert konfiguration. Der bliver altså ed andre ord korrigeret for systeatiske fejl for at indske risikoen for fejl under opålingerne. Nivelleringsinstruent blev testet efter Appendiks B, jf. Øvelser i Landåling af Karsten Jensen (2010), og helt konkret drejer det sig o et nivelleringsinstruent af typen Leica Sprinter 150M ed kopensator, AAUnr: ed tilhørende stadie og dåselibelle. Totalstationen blev testet efter Appendiks A (Jensen, 2010) og her drejer det sig o en totalstation af typen Leica TC ed AAUnr: ed tilhørende prisestok. 2.1 Kontrol af nivelleringsudstyr, Leica Sprinter 150M Under kontrollen vil der blive set nærere på: 1. Stadiets dåselibelle 2. Stadiets inddeling og nulpunkt 3. Nivellerinstruentets dåselibelle 4. Kopensatorens funktionsoråde 5. Sigtelinjens skævhed Kontrollen bør udføres i den anviste rækkefølge for at undgå isforståelser (Jensen, 2010), da eksepelvis nr. 4 følger i uiddelbar forlængelse af nr. 3. Nr. 5 kan desuden ikke kontrolleres, hvis ikke de andre punkter spiller ind. Den bør desuden foregå udendørs da enkelte punkter kræver en del plads. Pkt. 1 So det første kontrolleres stadiets dåselibelle sat inddeling og nulpunkt. Dåselibellen kontrolleres ved at stadiet placeres, så dåselibellen spiller ind, hvorefter et snorelod holdes op langs, hvorfor stadiet skal være parallelt ed lodlinjen (Jensen, 2010). Pkt. 2 Stadiets inddeling og nulpunkt er ligeledes enkelt at kontrollere; stadiet kan her saenlignes ed et andet stadie af sae type ens teleskopfunktionen skal være i orden og ikke kunne rykke sig under åling. Derudover kontrolleres det, at der ikke er fejl i inddelingen elle den klassiske analoge skala og den digitale skala, den skulle gerne vise det sae på begge sider (Jensen, 2010). Pkt. 3 Dåselibellen på nivellerinstruentet skal naturligvis også fungere perfekt for et tilfredsstillende resultat i arken. Dette kontrolleres ved at opstille nivellerinstruentet og indstille dåselibellen ved hjælp af benene og fodskruerne. Herefter skulle dåselibellen gerne spille ind når instruentets overdel roteres o vertikalaksen (Jensen, 2010). Pkt. 4 Herefter kontrolleres kopensatorens funktionsoråde, so gerne skulle kopensere for indre forskydninger af instruentets horisontalakse. Instruentet opstilles så kikkerten peger udover en af fodskruerne. Herefter aflæses stadiet ens der roteres først den ene vej og derefter den anden vej på fodskruen. Her hjælper kopensatoren så der skal skrues en hel del før der sker et udfald i aflæsningen, og udfaldet er naturligvis ed odsat fortegn alt efter hvilken vej du drejer, en bør være af sae størrelse (Jensen, 2010). Side 5 af 32
8 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Pkt. 5 Sigtelinjens skævhed er det eneste vanskelige punkt at kontrollere da det kræver et par operationer på instruentet og både skal foretages for den analoge og digitale aflæsning. Kontrollen foretages på en indre afsat bane på 30. ed to veldefinerede punkter (A og B), so her er træpæle i jorden, og hvor stadiet skiftevis placeres. Der laves et par ålinger til stadiet i hvert punkt fra to forskellige opstillinger af instruentet, hvorefter sigtelinjens skævhed kan henholdsvis beregnes og gees i instruentet. Korrektionen af sigtelinjen beregnes efter følgende forel: = + (Jensen, 2010) = 33 3 = 11 Højdeforskel 1 2 f 0,807 0,807 a 2,231 2,231 b 1,427 1,427 X=-0,0033 Den fejl, der er fundet, kan dog forholdsvist net eliineres ved at sørge for, at der under nivelleentet hele tiden arbejdes ed lige lange sigter. Efter denne kontrol bliver sigtelinjens skævhed korrigeret, så den nu kun er på 0,5., ved digital aflæsning, hvilket gees i instruentet. Ideelt skal den være Kontrol af totalstation, Leica TC1205+ Under kontrollen vil der blive set nærere på: 1. Udstyr til signalering af punkter 2. Indstilling af paraetre 3. Rør-/elektronisk libelle 4. Dåselibelle 5. Optisk lod / laserlod 6. Kolliationsfejl 7. Horisontalsakseskævhed 8. Vertikalkredsens indeksfejl 9. Udstyr til besteelse af instruent og sigteskivehøjde 10. Kopensatorens funktionsoråde 11. Udstyr til besteelse af lufttryk og teperatur 12. Afstandsålingsenhed Pkt. 1 Det kan konstateres at libellen på priset er justeret korrekt, så der er intet at beærke. Pkt. 2-5 Det er i disse punkter ikke nogen for for uregelæssigheder, hvorfor der intet er at beærke. Pkt. 6 Det drejer sig i dette punkt o at bestee instruentets kolliationsfejl. Det gøres ved at fokusere på et veldefineret punkt i iniu 100 afstand, ved et sigte nær vandret (Jensen, 2010). Horisontalretningen noteres begge kikkertstillinger, hvorefter kolliationsfejlen kan beregnes efter: = ± Side 6 af 32
9 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester H 1 =71,288 og H 2 =271,288 dered er c=0 og der er altså ingen nævneværdige fejl at beærke. Pkt. 7 Det næste punkt drejer sig o horisontalsakseskævheden. Dette punkt er ikke kontrolleret, da vejleder pointerede unødvendigheden af dette grundet genneslag i ålinger ed totalstation. Men skulle det kontrolleres, gøres dette ved at opstille instruentet ca. 20 fra en bygning. Et stadie placeres vandret ved bygningen, der fokuseres på et veldefineret punkt over stadiet, således at punktet kan observeres, hvorefter der ved hjælp af vertikalfinskruen stilles ned på stadiet hvor aflæsningen noters. Ved første kikkertstilling noteres Zenitdistancen, V, også. Kikkerten slås igenne og sae procedure gentages i anden kikkert stilling, dog uden notering af V. Herefter kan horisontalakseskævheden beregnes efter: = Hvor = (Jensen, 2010) Fejlen skal være i intervallet [-0,003 ; 0,003], og hvis ikke skal fejlen rettes af producenten. Pkt. 8 Totalstationen skal nu undersøges for indeksfejl på vertikalkredsen. Dette gøres ved at opstille instruentet ed ohu ca. 30 fra en bygning, hvorefter der indstilles på et veldefineret punkt, hvor zenitdistancen, V 1, noteres i første kikkertstilling. Herefter slås kikkerten igenne og V 2 noteres i sae punkt. Indeksfejlen kan så beregnes efter følgende forel: = V 1 = og V 2 = dered er u= og der er altså ingen nævneværdige fejl at beærke. Pkt. 9 Her er ingen fejl at beærke. Pkt. 10 Kopensatorens funktionsoråde er blevet kontrolleret ved at opstille instruentet ed ohu og kikkerten anbringes så den peger ud over en af fodskruerne. Der drejes ed uret på fodskruen indtil en fejleddelelse indtræder og hældningen noteres. Det blev konstateret, at det ligger i intervallet ]-0,7: 0,7[, so foreskrevet af Leica. Processen kan herefter gentages ed de øvrige fodskruer. Pkt. 11 Her blev gruppens observationer saenlignet ed den anden gruppes observationer på deres instruent og på den åde verificeret. Pkt. 12 Her blev totalstationen opstillet ved den afærkede bane og afstandsålingen blev genneført to gange. Herefter blev resultaterne saenholdt ed den anden gruppes resultater og på den åde verificeret. Efter ovennævnte kontrol af instruent og udstyr vurderes det at den egentlige netåling kan påbegyndes. Side 7 af 32
10 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 3. Netåling Figur 1 - Netskitse til brug ved geoetrisk og trigonoetrisk nivelleent 3.1 Geoetrisk nivelleent Det geoetriske nivelleent foretages so det første led i kortlægningen, da det skal bestee, hvilken højde planorådet befinder sig i. Det geoetriske nivelleent udføres for at bestee koten til hjælpepunkt 5101, so senere skal være udgangspunktet for det trigonoetriske nivelleent, der skal fastlægge koten til satlige punkter i det etablerede net. I dette afsnit vil der kort blive redegjort for, hvad et nivelleent går ud på, hvordan det planlægges sat hvordan instruentet kontrolleres før brug i arken. De indhentede resultater vil til sidst blive behandlet til brug i den videre kortlægning. Side 8 af 32
11 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Planlægning af nivelleent Der er visse krav og anbefalinger for udførelsen af nivelleentet. Disse er for at iødekoe fejl og opnå det bedst ulige resultat. Den norale praksis ved landåling er, at de indsalede observationer giver grundlag for beregning af f.eks. koordinater, højder og arealer. Noral praksis er at de iplicerede observationer i et passende ofang korrigeres for systeatiske fejl sat at ålingerne foretages på en sådan åde, at det ed stor sandsynlighed kan udelukkes at observationerne er behæftet ed grove fejl. Det er således forventet, at de korrigerede observationer (og deraf afledte koordinater, højder osv.) kun er behæftet ed tilfældige fejl. Kravene er, at indst tre officielle højdefikspunkter indgår og at et eller flere af de givne planfikspunkter skal indgå so nye punkter. Der anvendes et nivellerinstruent ed kopensator af typen Leica Sprinter 100. Til slut skal nivelleentet være sikret od grove fejl, hvilket vil sige, at der skal udføres kontrol af benyttede instruenter; so beskrevet ovenfor. Målingerne skal udføres ed ohu og der laves dobbeltålinger og evt. overbestete ålinger, so er ålinger, hvor der indsales flere observationer end nødvendigt af hensyn til de efterfølgende beregninger. Det anbefales yderligere at nivelleentet udføres so et dobbeltnivelleent. I Kort og Matrikelstyrelsens fikspunktregister, Valdear, findes de tre højdefikspunkter, so ligger nærest projektorådet. De næreste vælges for, at der ikke er for langt at gå, en satidig også fordi at der over længere afstande kan opstå fejl. Da et af de givne planfikspunkter skal indgå i opålingen udvælges det est optiale ud fra tæthed til projektorådet og gerne so idtpunkt fra højdefikspunkterne. Dernæst laves en netskitse over opålingen, so indeholder højdefikspunkter og nye planfikspunkter/hjælpepunkter. Skitsen viser således kun de punkter so er afærket i arken, hvorfor det er uligt at lave skitsen inden an går i arken. Opstillingspunkter og overgangspunkter vises ikke på skitsen da disse er overflødige. De valgte punkter kan ses herunder, ens netskitsen fregår af Figur 1. Punkter Kote i dvr90 Målt år / beregnet år , / , / , / 2002 Tabel 1 - Oversigt over valgte højdefikspunkter i Valdear Når kontrollen er udført og skitsen er klar kan indsalingen af data i arken starte Fejlteori og -grænser Dataindsalingen i arken består altså, jf. krav og anbefalinger, af tre dobbelt-nivelleenter fra et kendt højdefikspunkt, i Valdear, til punktet 5101, hvortil der i to uafhængige ålinger satidig er kørt igenne punkt 5102, jf. netskitsen. Efter dataindsaling i arken er det nødvendigt at vurdere ålingernes nøjagtighed i forhold til hinanden for at se, o de er gode nok til at arbejde videre ed eller o en ny åling er nødvendig. Side 9 af 32
12 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Da nivelleentet er udført so et dobbelt-nivelleent bør afvigelsen, d, elle to ohyggelig fortaget, og dered lige gode, ålinger ikke overstige: d ax = ±3 2σ H = ±3σ k 2 (forel 10.2, Jensen, 2005) hvor σ k er kiloeterspredningen i / σ k = 0,003 / jf. producenten, Leica og er beregnet ved hjælp af et stort antal udførte dobbeltnivelleenter. L er den nivellerede stræknings længde i k Hvis og såfret nivelleentet indeholder n delstrækninger gælder der at: = ±3σ k 2 =1 forel 10.3, Jensen, 2005 L er den nivellerede afstand i k. Hvis dobbelt-nivelleentet udføres elle to punkter ed kendte højder kan den aksiale afvigelse (D) elle den ålte iddelhøjdeforskel og den højdeforskel, der er beregnet, jf. de givne højder, beregnes efter følgende forel (Jensen, 2005, s. 62): = ±3 2 + forel 10.4, Jensen, 2005 K H fastlægges på grundlag af viden o de givne højders nøjagtighed. I et tilfælde so dette ville den blive sat til 0 da de givne højder er fastlagt ved præcisionsnivelleent og er at finde i Valdear. Der er ikke i dette tilfælde grundlag for at kontrollere de sidst nævnte fejlgrænser (10.3 og 10.4). Der er for det første kun én strækning pr. nivelleent og dernæst er det ikke elle to kendte punkter, en et blindt nivelleent. Længde ax Beregnet Foreløbig Trin og type Rækkefølge jf. (10.2) afvigelse højde til (blindt) ,0086-0, ,705 ax 2 (blindt) ,0089 0, ,704 3 (blindt) ,0105-0, ,703 4 (blindt) ,0049-0, ,632 Tabel 2 - Resultatet fra geoetrisk nivelleent Af ovenstående tabel fregår det tydeligt at ålingerne i arken ligger langt inden for de udregnede fejlgrænser jf. forel 10.2, og da alle ålinger i ålebogen ligeledes er acceptable å an gå ud fra at ålingerne er udført ed præcision og ohu og satidig konkludere at der ikke er behov for hverken en ekstra åling eller at se bort fra en åling. Side 10 af 32
13 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Efter de indledende beregninger af de tre blinde nivelleenter (trin 1, 2 og 3) frekoer der forskellige resultater for højden af punktet For at finde den endelige højde til punktet benyttes følgende forel, hvor højden bestees so iddeltal efter vægt, altså hvor punktet so ligger tættest på 5101 har størst indflydelse: = = , , , = 34,704. Da højden til punktet 5101 nu er kendt kan højden til 5102 nu beregnes, jf. forel 5.1. Den beregnede højde fregår også af Tabel 2. So det fregår af Tabel 2 ed fejl og fejlgrænser er alle fejlgrænser overholdt. Hered kan det udelukkes, at der er blevet lavet grove fejl i forbindelse ed det geoetriske nivelleent. Herved er koten til punkt 5101 bestet, og koterne til de resterende punkter i netålingen kan nu beregnes ved et trigonoetrisk nivelleent. Side 11 af 32
14 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 3.2 Trigonoetrisk nivelleent Ved hjælp af det geoetriske nivelleent er højden til punkt 5101 nu bestet i DVR90. Det er nu opgaven at bestee koten til de øvrige punkter i det etablerede polygon ved hjælp af et trigonoetrisk nivelleent. Dette gøres på baggrund af afstandsålingen, hvor der er ålt en skrå afstand og zenitdistancen. Foruden disse åles instruenthøjden (ih) og sigteskivehøjden (sh) fx ed en toestok. Alle afstandene og zenitdistancerne er ålt ed to satser for et ere nøjagtigt resultat. Det gøres ved, at totalstationen opstilles i satlige punkter i polygonen, hvorefter der sigtes til satlige synlige hjælpepunkter, hvilket fregår af netskitsen, se Figur Fejlteori og -grænser ved trigonoetrisk nivelleent Det trigonoetriske nivelleent er ålt ved dobbeltålinger, hvor begge ålinger er udført lige godt, og derfor bør afvigelsen, d, elle ålingen af sae højdeforskel ikke overstige: = ±3 2 (forel 10.5, Jensen, 2005) Hvor spredningen ( ) på en ålt højde ved trigonoetrisk nivelleent beregnes efter nedenstående forel (forel 6.4, Jensen, 2005): Beregningen af spredningen er lavet på baggrund af observationerne i filen Kat.obs fra netålingen, og resultaterne fregår af nedenstående tabel (Tabel 3). For at få straere fejlgrænser er det vurderet, at sigteskivehøjden kan bestees ed en spredning på 0,003, hvoriod det er ere usikkert ed instruenthøjden da det er ere vanskeligt, så den sættes derfor til 0,005. Punkter Spredning på højdeforskel,, jf ,006 0,006 0,006 0,006 0,006 0,006 0,006 0,006 Forudsætninger Sigtelængder og vertikalvinkler jf. nedenstående Tabel 4 = 0,13 og R = = 0,001 gon og = 2 = 0,15 = 0,005 (toestok) = 0,003 (toestok) Tabel 3 - Spredning på en højdeforskel Side 12 af 32
15 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Spredningen på højdeforskellen er, so det fregår af beregningen, konstant og holdes ligeså i alle efterfølgende udregninger for grænser i det trigonoetriske nivelleent. Grunden til at de er ens er priært at sigterne er nær vandret. På trods af, at sigtelængderne varierer ret eget, ændrer det altså ikke ved spredningen på højden. Hvis nivelleentet indeholder n delstrækninger bør suen af afvigelserne ved nogenlunde lige lange sigter ikke overstige: Punktnr. - Punktnr Afstand. 152,274 13, , , , , ,987 84,563 56, , ,992 Vinkel gon 100, , , , , , , , , , ,8034 Tabel 4 Oversigt over benyttede afstande og vertikalvinkler = ±3 2 forel 10.6, Jensen, 2005 Hvis det dobbelte trigonoetriske nivelleentet udføres elle to punkter ed kendte højder kan den aksiale afvigelse, D, (gabet) elle den ålte iddelhøjdeforskel og den højdeforskel, der er beregnet jf. de givne højder, beregnes efter følgende forel (Jensen, 2005, s. 64): = ±3 2 + forel 10.8, Jensen, 2005 Hvis der havde været en væsentlig større forskel i de skrå afstande, og zenitdistancerne elle punkterne i polygonålingen, skulle fejlgrænserne være udregnet, jf. forlerne 10.7 og 10.9 (Jensen, 2005, s. 64). Forskellen er, at spredningen på højdeforskellen varierer i disse opstillinger (Jensen, 2005, s. 64). Men så længe spredningen er den sae ved alle opstillinger er det ikke nødvendigt. Trin Trigonoetrisk nivelleent jf beregnet i TMK jf beregnet i TMK n jf ± 0,025-0,028-0, ± 0,057 ± 0, ,001 0, ± 0,028 ± 0, Forudsætninger = fra ovenstående Tabel 3 Tabel 5 - Kontrol af trigonoetrisk nivelleent understregning arkerer kendt punkt Ser an på afvigelsen, d, elle ålingen af sae højdeforskel i hvert af de første to trin, benyttes forel 10.5 til at beregne fejlgrænsen. Jf. forlen er = 0,025, hvilket, so det fregår af Bilag C i filen NivTrig.dok, ligger et godt stykke over nogen af ålingerne. Side 13 af 32
16 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester So det fregår af ovenstående Tabel 5 og Bilag C overholdes alle fejlgrænser for det trigonoetriske nivelleent, hvorfor det å antages, at det trigonoetriske nivelleent ikke er behæftet ed nogen grove fejl. Koterne til hjælpepunkterne er nu bestet, og kan ses på Bilag B, i filen dvr.koo. 3.3 Polygonåling Figur 2 - Netskitse over polygonålingen Da alle punkter i polygonen nu har fået tildelt en kote/højde, er det næste trin at bestee satlige punkters koordinater i planen. Til at gøre dette er der i forbindelse ed afstandsålingen i det trigonoetriske nivelleent også ålt horisontalvinkler ed to satser ved genneslag, altså i begge kikkertstillinger. Beregningen af polygonen foretages ed udgangspunkt i disse observationer og falder i to etaper; først beregnes koordinaterne i et lokalt syste, hvilket gøres for at kontrollere saenhængen elle punkterne inden de kobles på allerede kendte punkter i det landsdækkende koordinatsyste DKTM. I det lokale syste er det udelukkende de indsalede observationer der påvirker koordinaterne, hvoriod de i DKTM beregnede koordinater påvirkes af de i forvejen kendte punkters nøjagtighed. Beregningen er foretaget trinvist i TMK både hvad angår de lokale og DKTM koordinaterne. Projektorådet befinder sig i DKTM zone 3 og skal derfor beregnes i DKTM3. De forskellige beregningsstrategier gennegås kort herunder. Side 14 af 32
17 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester I det lokale syste har punkt 1 fået koordinaterne (1000,1000), hvilket gøres for neheds skyld for eksepelvis at undgå negative koordinater. Retningen fra punkt 1 til 6001 er desuden sat til 4 gon ud fra et skøn i GoogleEarth. De trinvise beregninger kan ses i tabellen herunder. Trin Type Punkter 1. Lukket Alindeligt Alindeligt Blindt Tabel 6 - Trinvis beregning i lokalt koordinatsyste, understregning arkerer kendt punkt Efter beregningen i det lokale syste kan beregningen af koordinater i DKTM3 begynde. De er ligeledes inddelt i forskellige trin, en hænges op på i forvejen kendte punkter. Disse punkters (5101, 5102, 6001 og 6002) koordinater blev udleveret ved projektets start. De trinvise beregninger kan ses i tabellen herunder. Da der i polygonen er stor forskel på sigtelængden netpunkterne ielle, hvilket fregår af Tabel 4, har det været af høj prioritet at få beregningen af det korte sigte så langt ned i trinene so uligt, da det kan påvirke nøjagtigheden. Det drejer sig o sigtet elle 5101 og 1, og det er derfor først edregnet i trin 8, hvor de allerede har været bestet i de foregående trin. Trin Type Punkter 5. Alindeligt Alindeligt Alindeligt Alindeligt Blindt Tabel 7 - Trinvis beregning i DKTM3, understregning arkerer kendt punkt Fejlteori og -grænser ved trigonoetrisk nivelleent Fejlgrænserne for polygonåling er delt op i to faser; vinkelsufejl (VSF) og gabet (GAB), so begge beregnes ved den trinvise beregning i TMK. Det skal dog nævnes, at der i tilfælde af en åling af et blindt polygon ikke beregnes vinkelsufejl eller gab, da der ikke er nogen overbesteelser. Vinkelsufejlene siger noget o, hvor præcise vinkelålingerne er i forhold til hinanden og gabet siger noget o forholdet elle, hvor præcis de beregnede koordinater er ålt og de givne koordinater. Her ses i første ogang på vinkelsufejlene, so kan undersøges på to åder; nelig hvis sigterne i ålingen er lige lange og hvis ikke. Her startes ed at se på ekseplet, hvis sigterne ikke er nogenlunde lige lange. Til at vurdere vinkelsufejlen for sigter der ikke er lige lange benyttes følgende forel so fejlgrænse: = ± (forel 9.25, Jensen, 2005) Hvor de forskellige fejlbidrag henholdsvis er vedrørende de ålte vinkler, (forel 9.23, Jensen, 2005), og hvilken spænding der er elle de iplicerede punkter ud fra de kendte punkters nøjagtighed, (forel 9.24, Jensen, 2005). Side 15 af 32
18 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Hvis satlige sigter i polygonen er nogenlunde lige lange og alle vinkler er ålt lige godt kan udtrykket fra før forenkles til: = ±3 + (forel 9.28, Jensen, 2005) hvor er antal ålte vinkler i polygonen ved den pågældende beregning Det er stadig de sae fejlbidrag so før, en her regnes fejlbidraget vedrørende vinklerne på baggrund af den gennesnitslige længde elle sigterne, jf. forel 9.27, Jensen, 2005, so så ganges ed antallet af ålte vinkler i polygonen. Det skal lige nævnes, at sættes til 0 ved beregning af alindelig polygon III og et lukket polygon (se Figur 9.4, Jensen 2005) da de givne punkters nøjagtighed ikke har nogen indflydelse (Jensen, 2005, s. 54). Ved beregning af fejlgrænser for vinkelsufejl sættes til 0 af to årsager; dels er usikkerheden på punkterne ikke kendt, en også for at få straere fejlgrænser. Når fejlgrænserne for vinkelsu er fastlagt kan an gå videre til fejlgrænsen for gabet. Hvis sidelængden i polygonen er indre end et par hundrede eter, og da afstandene er ålt elektrooptisk og ed sae åleindsats (Jensen, 2005, s.54), bør gabet ikke overstige følgende fejlgrænse: = ±3 + (forel 9.32, Jensen, 2005) hvor er antal ålte sider = 2 er spredningen på en ålt afstand, so beregnes på følgende åde: = (forel 9.30, Jensen, 2005) hvor er grundfejlen i eter, so er 0,001, jf. producenten, Leica er den afstandsafhængige fejl i eter pr. kiloeter, so er 0,0015, jf. producenten, Leica er centreringsspredningen i eter, so er elle 0,001 og 0,005 alt efter hvor god an er til at centrere og hvilket udstyr so benyttes, fx støttestativ til priset S er sidelængden i eter, so svarer til den gennesnitlige længde af de n s sider Af sae årsag so ved beregning af fejlgrænser for vinkelsufejl sættes til 0 af to årsager; dels er usikkerheden på punkterne ikke kendt, en også for at få straere fejlgrænser. Side 16 af 32
19 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Trin Polygon Lokalt syste: DKTM3: Vinkelsu fejl ifølge TMK gon 0,0012 0,0088-0, ,0122 0,0085 0,0002-0, VSFax Jf. (9.25) gon ± 0,0127 ± 0,0139 ± 0, ± 0,0144 ± 0,0145 ± 0,0082 ± 0, n β S g VSFax Jf. (9.28) gon ± 0,0119 ± 0,0129 ± 0, ± 0,0128 ± 0,0137 ± 0,0074 ± 0, Gab ifølge TMK Forudsætninger Sigtelængder jf. Tabel 4 = 0,001 gon, = 2 satser, = 0,003 og 0,000 gon = 0,001, = 0,0015 /k, = 0,003 og 0,000 Tabel 8 Kontrol af polygonåling understregning arkerer kendt punkt 0,007 0,005 0,011-0,003 0,002 0,004 0,006 - n s GABax Jf. (9.32) ± 0,019 ± 0,013 ± 0,013 - ± 0,017 ± 0,017 ± 0,010 ± 0,010 - So det fregår af ovenstående tabel, er alle de opstillede grænser overholdt ved polygonålingen. For vinkelsufejlenes vedkoende ligger ålingen under begge opstillede fejlgrænser, både for de lige lange sigter og de ikke lige lange, hhv. forel 9.28 og Så da polygonen overholder satlige fejlgrænser kan det konkluderes, at ålingen er udført tilfredsstillende og at hjælpepunkternes koordinater i planen kan danne grundlaget for detailålingen. Efter at punkter har fået koordinater i planen, E og N koordinater, kan disse flettes saen ed de før beregnede højder i diverse nivelleenter. Dette giver en fil ed (E,N,H) koordinater til satlige netpunkter, hvorfor polygonnettet kan bruges so grundlag for detailålingen da ingen af ovenstående ålinger er over fejlgrænsen. Denne koordinatfil har navnet dkt_dvr.koo. Detailpunkterne vil derfor både blive tildelt koordinater i planen sat en højde. Side 17 af 32
20 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 4. Detailåling Sidste skridt i opålingsprocessen er detailåling ed det forål, at danne grundlag for frestillingen af det tekniske kort over projektorådet. Detailålingen er foretaget so en autoatiseret polær detailåling ed totalstation. I detailålingen er alle ikke flytbare objekter, so går i jorden ålt ind. Indsalingen af data er foretaget fra 20 forskellige frie opstillinger, so alle refererer til indst to af de kendte punkter fra netålingen, det er faktisk kun en opstilling, der ikke refererer til tre kendte punkter. Herunder er fregangsåden for detailåling og beregningen opridset i punktfor: - Polær detailåling ed totalstation - Kontrolåling ed stålbånd og toestok - Konvertering af filer i TMK fra.gsi til.obs DETAIL.obs og nydetail.obs - Rettelser i observationsfilerne, jf. ålebog fx slettes enkelte opstillinger, nogen punkter ændres, jf. kodetabel og forskellige højder ændres - Beregning af fejlgrænser for frie opstillinger sat kontrolpunkter sat vurdering af disse - Beregning af koordinater til satlige detailpunkter i DETAIL.obs. Dette gøres ud fra koordinatfilen fra netålingen; dkt_dvr.koo. - Konvertering af koordinatfilen til DXF-forat, dkt_dvr.dxf, so skal benyttes til optegning af teknisk kort i AutoCAD - Frestilling af teknisk kort i AutoCad - Måling og beregning af kontrolafstande ålingerne udføres ed stålbånd - Beregning af fejlgrænser for og vurdering af kortets nøjagtighed For at sikre ålingerne od grove fejl, er udgangssigtet blevet kontrolleret flere gange i forbindelse ed hver opstilling og igen efter det sidste punkt var ålt. Dette gøres for at sikre, at opstillingen ikke har drejet sig under åling. Der er derudover ålt nogle enkelte kontrolpunkter, so er punkter, der er ålt fra forskellige opstillinger, altså dobbeltålinger. Efter detailålingen er alle bygningsdiensionerne ålt ed stålbånd, for at kunne kontrollere de afstande, der er ålt ed totalstation, og for at sikre bygningsteaet od grove fejl. Desuden er forskellige fejlgrænser for ålingerne og opstillingerne regnet for at sikre ålingernes kvalitet. 4.1 Fejlgrænser og vurdering af detailåling Vurderingen af detailålingen falder i to etaper, først vurderes satlige opstillinger og dernæst kontrolpunkterne, so er de veldefinerede dobbeltålte punkter. Det første skridt i vurderingen af ålingen er at udregne punktspredningen ( ) og spredningen på en højde ( ) for hver af opstillingerne. Spredningerne regnes efter det korteste og længste sigte i hver opstilling. Dette gøres for at få et overblik over forskellen. Spredningen beregnes ved hjælp af MatLab scriptet spred_pol. so henviser til følgende forler for de to spredninger: Side 18 af 32
21 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester = + 2 forel 11.3, Jensen, 2005 = 2 + forel 11.10, Jensen, 2005 hvor er spredningen på den reducerede afstand i eter er spredningen på den ålte vinkel indsat i gon = 200/ S er den reducerede afstand i eter er spredningen på højdeforskellen, jf. forel 6.4 er antallet af kendte punkter observeret fra den frie opstilling er spredningen på højdeforskellen fra A til P Vurdering af de frie opstillinger Når de frie opstillinger skal vurderes skal an beregne ålestoksfaktoren, præcisionen ålingen udføres ed; residualer og spredningen på vægtenheden. Derefter beregnes ålestoksfaktoren (k). Målestoksfaktoren er den forskel der er på den sae afstand ielle to punkter, fundet ed forskellige etoder. Hvor der ed opstilling er ålt en afstand ielle kendte punkter, og afstanden beregnet ved hjælp af koordinater. Denne forel benyttes til at regne ålestoksfaktoren, so tegner et billede af forholdet elle punkterne: = forel 13.4, Jensen, 2005 For at vurdere ålestoksfaktoren, k, beregnes afvigelsen ( ) vha. forlen: = 1 forel 13.10, Jensen, 2005 Denne afvigelse bør være tæt på 0 og holde sig inden for fejlgrænsen, so beregnes vha. følgende forlen: = ±3 forel 13.11, Jensen, 2005 hvor σ s er spredningen på den ålte afstand i eter beregnet, jf. forel 3.9 (Jensen, 2005). S B er længden af den længste side i den polygon, der udspændes af de kendte netpunkter. I tabellen nedenfor udregnes afvigelsen på afstanden, og fejlgrænserne for denne. Målestoksfaktoren (k) og afvigelsen (d k ) er beregnet i filen DETAIL.dok, der er genereret ved beregning af koordinater til detailpunkter. Filen spred_pol.txt benyttes til udregning af fejlgrænsen. Side 19 af 32
22 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Opstilling Opstilling pp pp pp pp ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± ± 213 Tabel 9 - Målestoksfaktoren og aksværdi So det ses af ovenstående tabel er der enkelte opstillinger der ligger over fejlgrænsen; opstilling 1009, 1010 og At disse opstillinger ligger over aksværdien kunne tyde på grove fejl i forbindelse ed ålingen, en efter nærere eftersyn og kontrol har dette vist sig ikke at være tilfældet. Det er derfor nødvendigt, at beregne, hvor stor afvigelsen bliver i disse opstillinger. I opstillingerne 1009 og 1010 er de længste sigter henholdsvis 30 og 28, hvilket giver en afvigelse på 0,005 over der aksiale. I opstilling 1014 er det længste sigte 77 og det giver en afvigelse på 0,011 over den aksiale grænse. Det tekniske kort vil blive tegnet i ålestoksforholdet 1:200 eller højere, derfor å afvigelsen ikke være større end dette forat tillader for et teknisk korts nøjagtighed. Efter TK99 å et teknisk kort ed åleforholdet 1:5.000 afvige ed op til 100c i planen og 150 i højden. Dette skaleres ned og nøjagtigheden på det tekniske kort skal derfor være bedre end 5 c i planen og 7,5 c i højden. Det vurderes hered, at de beregnede afvigelser ikke har den store indflydelse da de ikke er større og at alle ålingerne ligger inden for disse grænser. Det næste trin i vurderingen er, at se på præcisionen af opstillingerne. Dette gøres ved hjælp af de beregnede residualer, so er et udtryk for afvigelsen elle de koordinater, der beregnes ud fra sigterne til de kendte punkter og de kendte punkters koordinater, efter korrektion ed ålestoksfaktoren, hvorfor an får en residual i hver retning; både i E, N og Z/H. Det skal dog nævnes, at residualerne kun regnes i de opstillinger, hvor an sigter til tre eller flere kendte punkter. I tilfælde ed sigte til kun to kendte punkter er afvigelsen nelig korrigeret ved ålestoksfaktoren. Residualerne er ligeso ålestoksfaktoren beregnet i TMK. For at vurdere de beregnede residulaler kan følgende forler benyttes: 2D transforation: 1D translation: = ±3 (Forel 13.15, Jensen, 2005) = ±3 (Forel 13.16, Jensen, 2005) Maksværdierne er beregnet efter den laveste spredning for at få de straeste fejlgrænser. Spredningen beregnes i scriptet spred_pol. og kan ses i Bilag B. Side 20 af 32
23 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Opstilling Kendte punkt Tabel 10 - Målte residualer og deres aksværdier -0,001 0,002-0,001-0,001 0,001 0,002-0,001 0,001-0,002 0,001 0,001-0,002 0,001 0,002-0,002 0,001 0,000 0,001 0,000-0,005 0,003 0,001-0,003 0,002 0,001-0,002 0,001 0,001 0,003-0,003 0,000-0,004 0,003 0,001-0,005 0,004 0,001 0,001-0,003 0,002 0,000 0,000 0,000 0,001-0,002 0,001 0,002-0,004 0,002 0,001-0,001 0,000-0,001-0,003 0,004 0,002-0,005 0,003 0,001 0,001-0,002-0,001-0,003 0, ,002-0,002 0,000 0,000 0,003 0,001-0,002-0,002-0,001 0,000-0,001 0,002-0,001-0,002 0,003-0,001-0,002 0,003-0,001-0,001 0,002-0,001-0,004 0,003 0,001-0,004 0,003 0,001 0,003-0,002-0,001-0,003 0,003-0,000 0,007-0,009 0,001 0,001-0,001-0,000-0,001 0,001 0,001-0,001 0,008-0,006 0,000 0,003-0,002-0,001-0,001 0,002 0,001-0,001-0,001-0,002-0,004 0,006-0,001 0,000 0,001-0,003-0,001 0,004 0,000 0,001-0,001-0,002 0,000 0,002 0,000-0,002 0,001-0,002 0,001 0,001 0,002 0,000-0,003-0,001 0,004-0,003-0,005 0,010-0,004 0,006 0,001-0,007 0,008-0,005-0,003 0,002-0,003 0,001 0,000-0,004 0,004 0,001 0,001-0,002 0,003-0,003 0,000-0,005 0,003 0,002 0,004-0,002-0,001 0,001-0,001 0,000 og ± 0,009 ± 0,009 - ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 ± 0,009 Side 21 af 32
24 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Vurdering af 2D transforation: Resultaterne i ovenstående Tabel 10 viser, hvor eget der er korrigeret i hver opstilling i hvert ålt detailpunkt. Den største korrektion i E, N planet er på 9, hvilket også, i dette tilfælde, er den aksiale grænse. Men da det kun er et par steder der korrigeres så eget og den alle øvrige steder ligger tæt på 0, å det siges at være tilfredsstillende. Vurdering af 1D translation: Tabel 10 viser også, hvor eget der er korrigeret i højden til hvert punkt. Den aksiale korrektion i højden er 10, og her er den aksiale grænse ligeledes 9. Det drejer sig idlertidig kun o den ene åling at den ene residual ligger udenfor, hvoriod satlige andre ligger tæt på 0, hvorfor ålingen er tilfredsstillinde. Alle beregninger i Tabel 10 bygger på de teoretisk beregnede værdier for punktspredningen og spredningen på en højde. Men hvis an vil have et billede af, hvor god en åling i arken reelt har været, kan spredningen på vægtenheden beregnes i E, N og Z planet. Disse værdier kan så saenlignes ed de teoretisk beregnede fra ovenstående tabel. Disse værdier skal så gerne passe saen da de opstillede fejlværdier ellers ikke passer til de faktiske ålinger. Den vægtede spredning beregnes ved hjælp af forlen og (Jensen, 2005). Det er dog TMK so her har givet resultaterne, so kan ses herunder: Opstilling ,005 0,006 0,002 0, ,005 0,006-0, ,005 0,006 0,002 0, ,005 0,006 0,002 0, ,005 0,006 0,003 0, ,005 0,006 0,003 0, ,005 0,006 0,002 0, ,005 0,006 0,005 0, ,005 0,006 0,005 0, ,005 0,006 0,003 0, ,005 0,006 0,004 0, ,006 0,006 0,009 0, ,005 0,006 0,005 0, ,005 0,006 0,003 0, ,006 0,006 0,007 0, ,005 0,006 0,003 0, ,005 0,006 0,004 0, ,005 0,006 0,001 0, ,005 0,006 0,006 0, ,005 0,006 0,004 0,001 Tabel 11 - Teoretisk spredning og den egentlig ålte, ægtede spredning Side 22 af 32
25 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Hvis an saenligner punktspredningen ed spredningen på vægtenheden fregår det af ovenstående Tabel 11, at den vægtede spredning i de fleste tilfælde ligger under punktspredningen. Dog er spredningen på vægtenheden i opstilling 1013 og 1016 lidt højere i E,N planen, ens opstillingerne 1014 og 1015 ligger lidt over i højden. At opstilling 1014 overskrider den forventede punktspredning, kan satidig være årsag til at ålestoksfaktoren ved denne opstilling overstiger den aksiale grænse. Det kan derfor konkluderes, at opstilling 1014 ikke er så god i forhold til de opstillede krav, hvilket kan skyldes en centreringsfejl, eller at spredningen på instruent- eller sigteskivehøjden er sat for lavt i forhold til den egentlige usikkerhed. Dette gælder også på de andre opstillinger der ligger over spredningen på vægtenheden Vurdering af kontrolpunkter Ved at åle det sae punkt fra to forskellige opstillinger, vil der være en ekstra ulighed for at tjekke nøjagtigheden på ålingerne. Dette gøres ved beregning af koordinater for at finde afvigelsen ielle disse. Et punkt kan åles til fra flere opstillinger, derfor skal iddelkoordinaterne udregnes. = = (Forel 13.17, Jensen, 2005) Herefter beregnes afvigelsen ielle de enkle koordinatsæt og iddelkoordinaterne: = = (Forel 13.18, Jensen, 2005) Det sae gør sig gældende for højden: = I Bilag B findes punkternes koordinater, der er fundet i dkt_dvr.koo og nydkt_dvr.koo. Punkternes iddelkoordinat er beregnet, og herefter er de enkelte ålingers afvigelse fra iddelkoordinaten beregnet. Kontrolpunkterne har under opåling ikke fået sae nr. en punkterne er de sae. Er punktet veldefineret bør den beregnede afvigelse ikke overstige: På sae åde kan afvigelsen i højden beregnes: = ±3 = ±3 (Forel 13.19, Jensen, 2005) = ±3 I nedenstående skea er den aksiale afvigelse fra iddelkoordinaterne indsat, og dertil er fejlgrænserne for denne beregnet. Fra filen spred_pol. kendes punktspredningen ( )=0,005 og spredningen på højden ( )=0.003, derved kan fejlgrænserne beregnes. Kontrolpunkterne arkeret ed GRØNT er de punkter tættest på iddelværdien, og er derfor det benyttede punkt i det tekniske kort. Punkterne der ikke er arkeret, er de den aksiale afvigelsen er beregnet efter, da det er her afvigelsen er størst. Side 23 af 32
26 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester MAX afvigelse fra iddelkoordinater Opstilling 1 Opstilling 2 Kontrolpunkt / N E H , 285-0,006 0,001-0,003 ±0.015 ± , 201 0,001 0,009-0, , 286 0,004-0,002 0, , 704-0,002 0,000-0, , 837 0,000 0,002 0, , 837 0,000 0,001 0, , 607-0,003-0,004 0,001 Tabel 12 - Oversigt over kontrolpunkter So det ses af ovenstående skea ligger alle kontrolålingerne inden for fejlgrænserne. Der er flere opstillinger hvor der ikke er udført kontrolålinger, en alle ålinger er udført ed lige stor ohug, derfor å det forventes at de andre opstillinger ikke er behæftet ed grove fejl. Punkterne der er benyttet til kontrolåling er veldefinerede fritliggende punkter, det er derved let at centrere prisestok sae sted, og iniere præciseringsfejl. Der bliver i Vurdering af de frie opstillinger spået tvivl o hvor vidt opstillingerne 1014 og 1015 er gode nok siden de ligger uden for fejlgrænserne. Dog ses det nu, at de indgår i tre af kontrolålingerne, og disse ålinger ligger alle inden for fejlgrænserne. På trods af at disse opstillinger viste sig ikke at være så nøjagtige so forventet, er punkterne stadig lige så præcise so opstillingerne 1017 og 1018 der ligger inden for fejlgrænserne. Side 24 af 32
27 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 5. Frestilling af teknisk kort sat 3D visualisering Efter den polære detailpunktsåling benyttes de ålte data til produktionen af det tekniske kort. Detailpunkternes koordinater er i forrige afsnit, 4. Detailåling, blevet beregnet i TMK ved hjælp af de kendte punkters koordinater, fra 3. Netåling. Ved brug af TMK bliver den opdaterede koordinatfil, dkt_dvr.koo, konverteret til et forat, der er genkendelig for et tegneprogra, DXF-forat. Tegneprograet der benyttes til frestilling af det tekniske kort er AutoCAD. Koordinatfilen indlæses, hvorefter prograet tegner punkter i forskellige lag efter hvilken objektkode punktet er tildelt i arken. Punkterne placeres efter dets koordinater. So nævnt har alle ålinger under detailålingen fået en objektkode. Det benytter prograet til at opdele alle punkterne i lag svarende til objektkoden, hvorefter an kan tage punkter fra et lag til et andet. For at kunne forbinde punkterne til linjer og flader, benyttes skitserne fra ålebogen. I tegneprograet benyttes laget PUNKTNUMRE til at finde de tilsvarende nure noteret i arken. I ålebogen er der ligeledes tegnet eleenter ålt ed bueskæring, eller ål på andre objekter der ikke var ulige at åle ed totalstation. Efter punkterne er iporteret i AutoCAD er der flere af punkterne der under udforningen er blevet flyttet til et andet lag; nogen grundet tastefejl i arken, og andre for at give den bedst ulige overskuelighed i kortet. Der er foruden de eksisterende lag dannet lag til udforning af kortet; Hjælpelinjer bygning, Kontrolpunkter og Slettede punkter. Kortet er tegnet over to ogange. Efter første udkast blev der foretaget en arkrevision og punkter ed fejl blev lagt over i sidstnævnte lag. Der er foretaget flere arkrevisioner igenne udarbejdelsen, hvor der er ålt linjer og afstande ielle opålte punkter. Det var også nødvendigt en en ekstra opstilling og nye punkter ålt ed bueskæring er indtegnet. Det tekniske kort er tilrettet ed tekst, farver og signaturer efter objektkoder, for at give bedst ulig overblik. Det endelige kort kan forefindes i Bilag D. Der er i forbindelse ed den polære detailpunktsåling også indålt punkter på bygningernes tag reflektorløst. Disse ligger i sae koordinatfil so alle andre detailpunkter, en skal i odsætning til tidligere ikke bruges til et 2D kort en deriod en 3D visualisering af bygningen. Fra det tekniske kort er den saenhængende bygning i idten af kortet også tegnet i 3D. Bygningen i det tekniske kort består af flere større bygningsdele; tre større bygningsdele sat broen over Lautrupvang. Alle bygningsdele er beliggende på Lautrupvang ed adresserne 2, 2A og 2B. Til at tegne bygningen benyttes AutoCAD so også det tekniske kort er tegnet i. Ved hjælp af funktionen ORBIT, er det uligt at se kortet ed højder, og der kan så tegnes i 3D. Trådodellen tegnes ganske enkelt ved at forbinde hjørnepunkterne på taget ed bygningshjørnet ved fri ur over sokkel. Nogen punkter er kun ålt oppe eller nede, en så kan et nyt hjørnepunkt rekvireres ved hjælp af kopiering og flytning i Z-aksen. Dered dannes der en trådodel af bygningen Lautrupvang 2, 2A og 2B so forefindes i Bilag E. Side 25 af 32
28 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 6. Vurdering af bygningsdiensioner Ved første skridt i vurderingen af det tekniske korts nøjagtighed udføres en åling af de opålte bygningers hoveddiensioner ed stålålebånd. Ved den polære detailåling er afstanden elle to bygningshjørner fastlagt ed koordinaterne (E P1,N P1 ) og (E P2,N P2 ). Afvigelsen elle ålene fra den polære detailåling og stålbåndsålingen kan beregnes vha. forlen: = ( ) + ( ) (Forel 13.20, Jensen, 2005) Det er i dette projekt blevet besluttet, at afstandene til at kontrollere bygningsteaet for grove fejl, baseres på at afstanden er ålt i AutoCAD og ikke beregnede efter koordinaterne. Hvis er under en båndlængde og diensionsålingerne er udført ed ohu, kan an betragte de tilfældige fejl fra ålingen ed stålålebåndet so ubetydelige, derfor vil afvigelsen hovedsagligt beskrive de tilfældige fejl ved den polære åling ed totalstationen. Ved et veldefineret bygningshjørne bør afvigelsen, d, ikke overstige: = ±3 2 (Forel 13.21, Jensen, 2005) er punktspredningen, so er fastsat til 0,006. Punktspredningen er beregnet to gange for hver opstilling i scriptet spred_pol., so kan findes på Bilag B, både for det korteste og det længste sigte for at få en rielig grænse for ålingerne. Hvis an har beregnet afvigelsen på et større antal bygningsdiensioner, kan der beregnes en spredning efter følgende forel: = Forel 13.22, Jensen, 2005 hvor d i er afvigelsen ved den i te bygningsdiension i eter n er antallet af kontrollerede bygningsdiensioner Med ovenstående forudsætninger, bør den ålte spredning ikke afvige væsentligt fra 2 = 0,008 (Jensen, 2005, s. 98). I skeaet herunder er satlige bygningsdiensioner og disses afvigelser opstillet og derefter bliver punktspredningen beregnet og vurderet. Mål nr. Bygningsdiensioner ålt i AutoCAD. D Målebånd. d Afvigelse ,784 43,781 0,003 ± 0, ,878 18,871 0, ,598 23,620-0, ,873 18,871 0, ,583 45,593-0, ,210 17,202 0, ,668 38,690-0, ,669 1,679-0,010 Side 26 af 32
29 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 9 1,994 2,023-0, ,823 5,821 0, ,220 1,235-0, ,258 6,274-0, ,749 3,753-0, ,074 5,078-0, ,541 2, ,392 38,408-0, ,466 36,460 0, ,049 1,062-0, ,545 1,578-0, ,193 1,210-0, ,115 0, ,305 0, ,818 5,827-0, ,305 0, ,140 0, ,184 1,201-0, ,976 4,971 0, ,380 40,391-0, ,740 1,725 0, ,183 0,198-0, ,694 1,703-0, ,733 6,728 0, ,479 0,488-0, ,359 2,364-0, ,510 0,513-0, ,772 4,751 0, ,983 0,991-0, ,678 1,673 0, ,785 28,810-0, ,756 4,752 0, ,580 2, ,567 7, ,955 0, ,312 0,320-0, ,559 9,581-0, ,312 0,320-0, ,080 1,081-0, ,299 23,300-0, ,312 0,320-0, ,581 9, ,312 0,320-0, ,990 0, ,900 7, , ,915 4,915 0 Tabel 13 - Oversigt over opålte bygningsdiensioner Beregnet spredning = 0,011 jf. forel Side 27 af 32
30 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester So det fregår af ovenstående Tabel 13 er alle bygningsdiensionerne ålt og stort set alle afvigelser ligger indenfor grænsen. Det drejer sig kun o to ålinger so ligger over fejlgrænsen og de ligger kun hhv. 4 og 8 over, hvilket å siges at være tilfredsstillende urens tilstand taget i betragtning. Murens facade er frestillet i et ateriale so ikke er veldefineret, da den flere steder varierer i overfladen; op od 4 c. Endvidere er spredningen beregnet, på baggrund af de indsalede data, til 0,011, hvilket å siges at være en rielig afvigelse fra 2, so blev beregnet til 0,008. Det kan dered konkluderes, at bygningsteaet ikke er behæftet ed nogen for for grove fejl. Side 28 af 32
31 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 7. Kontrol af kortets nøjagtighed Det næste og sidste skridt i vurderingen af kortets nøjagtighed er åling af kontrolpunkter. Der er af en vejleder udpeget 20 kontrolafstande, so skal kontrolleres ved opåling ed stålålebånd. Ligeso ved Vurdering af bygningsdiensioner er det også her blevet besluttet at saenligne ålingerne ed stålbåndet ed afstande ålt i AutoCAD da det vil give den sae afstand so beregningen. Ligeledes so ved kontrol af bygningsdiensionerne beregnes afvigelsen elle de to sæt observationer for at finde eventuelle afvigelser, og for at kunne regne punktspredningen således at der kan gives et bud på kortets nøjagtighed. Forudsætningerne og fregangsåden for beregningen er den sae so blev benyttet i afsnit 7 Vurdering af bygningsdiensionen og i tabellen herunder kan de beregnede og ålte afstande sat afvigelser og evt. beærkninger forefindes. Afstand nr. S 1 Målebånd (D). S 2 Afstand ålt i AutoCAD. d = S 2 S 1 Afvigelse. Beærkninger 1. 44,210 44,207-0, ,695 19,682 0, ,776-0, ,117 25,119 0, ,950 27,953 0, ,801 26,811 0, ,974 20, ,724 22,723-0,001 Målt i AutoCAD til brønddæksel valgt i Vurdering af kontrolpunkter 9. 31,000 31, ,980 17,963 0,017 Brønddækslet er hævet op over jorden, derfor svært ed den vandrette afstand. Benyttes Pythagoras bliver afstanden indre ,131 28, ,260 36,268 0, ,289 30,278-0, ,310 28,306-0, ,275 17,269-0,006 Målt i AutoCAD til brønddæksel valgt i Vurdering af kontrolpunkter ,332 11,338 0, ,235 39,242 0, ,702 12,701-0, ,992 19,995 0, ,992 42,994 0,002 Tabel 14 - Oversigt over opålte kontrolafstande = ±0,025 2 = 0,008 = 0,007 So det ses af Tabel 14 overholder alle kontrolålinger fejlgrænsen for. Endvidere er den salede punktspredning beregnet ud fra ålingerne og den ligger indenfor det forventede og ser eget fornuftigt ud. Selvo spredningen ser god ud kan ålingerne godt være skæve idet der kan være ensidige fejl ved kontrolålingerne. Derfor bliver dette naturligvis også kontrolleret, en her er der ikke den store forskel på o afvigelserne er positive eller negative, da der er syv negative og ti positive, ens tre af de er 0. Side 29 af 32
32 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester Ser an på de afvigelser der nu er, så kan de skyldes at de indålte objekter, so fx brønddæksler, idten af en lygtepæl, kan være eget vanskelige at definere til så præcis en kontrolåling, en derfor er det så bare det bedre at observationerne ligger indenfor. Med en punktspredning på 0,007 so udtryk for kortets nøjagtighed, kan det hered konkluderes at være tilfredsstillinde, da kortets nøjagtighed derved holdes under en centieter, hvilket er tilfredsstillinde, jf. TK99. De opålte afstande so kontrollen er ålt elle, kan ses på Bilag F. Side 30 af 32
33 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 8. Konklusion og diskussion Projektets forål var at få udforet et teknisk kort og en 3D visualisering af det udpegede oråde. Dette er blevet løst igenne den viden vi er blevet tildelt under seestrets kurser. Udforningen af det tekniske kort og 3D visualiseringen er blevet uligt igenne nivelleenter og detailpunktsberegning. Beskrivelsen af disse og vurdering af fejlgrænser er blevet analyseret for nå fre til den bedst ulige nøjagtighed og kortpræcision. Der er foretaget flere overvejelser okring hvordan det er uligt at iniere fejlene på opålingerne. For eksepel er der under opåling etableret hjælpepunkter og kontrolpunkter for at være sikker på at der ikke er grove eller lovæssige fejl på ålingerne. Alle disse processer har ført til et teknisk kort, der lever op til tekniske korts standarder. Efter (TK99) skal teknisk kort ed ålestoksforholdet 1:200 have en nøjagtighed på 5 c i planen, og 7,5 c i højden. Det færdige korts nøjagtighed er blevet beregnet både ed vurdering af kontrolpunkter, vurdering af bygningsdiensioner og kontrol af kortets nøjagtighed. Den endelige vurdering igenne disse, er at kortet lever op til præcisionskravene. Kortets nøjagtighed er igenne de 20 kontrolpunkter blevet bestet til en spredning på 7, og fejlgrænsen lå på 8. Dette er opnået ed ålinger udført ed stor ohug og ed veldefinerede punkter. Veldefinerede punkter er en nødvendighed for at kortet bliver nøjagtigt, og den udvalgte bygnings byggeaterialer er varierende i størrelse, derfor er nøjagtigheden på bygningsdiensionerne svære at vurdere. Side 31 af 32
34 Aalborg Universitet København P4-Projekt Casper Aagaard og Nikolaj Purhus Afleveret 22. juni 2012 Gruppe 2 Landinspektørstudiet 4. seester 9. Litteraturliste AUC, DSFL, KMS.fl., 1999, Specifikationer for tekniske kort - TK99 Lokaliseret den på: Jensen, K., 2005, Landåling i Teori og Praksis. Jensen, K., 2010, Øvelser i Landåling. Studievejledning 2012, Landinspektøruddannelsen, 4 seester, 2. Del 2012, Tea: Detaljeret opåling. Side 32 af 32
35 Side 1 af 75 Bilag C - Udskrift af dokuentationsfiler fra TMK Log-fil TMK, Konvertering fra TC110-forat til observationsfiler (2) og (3) i TMK-forat :31:13 Observationsfil i TC110-forat: C:\Landinspektoer\TMK\Projektet\SaletJOB.obs Følgende observationsfiler i TMK-netobs-forat er oprettet: C:\Landinspektoer\TMK\Projektet\Hz.obs C:\Landinspektoer\TMK\Projektet\Kat.obs Opstillinger L= 1: JOB = 000POLY2 INSTR = OBS = 00000GR2 DATO = L= 2: TEMP = 12C TRYK = 1013bar L= 3: TEMP = 20C TRYK = 1021bar L= 48: OPSTL = 1 KODE = 14 ih = 1.589M L= 58: OPSTL = 1 KODE = 14 ih = 1.589M L= 36: OPSTL = 2 KODE = 14 ih = 1.584M L= 42: OPSTL = 2 KODE = 14 ih = 1.584M L= 68: OPSTL = 3 KODE = 14 ih = 1.620M L= 78: OPSTL = 3 KODE = 14 ih = 1.620M L= 88: TEMP = 20C TRYK = 1021bar L= 102: OPSTL = 6001 KODE = 14 ih = 1.643M L= 112: OPSTL = 6001 KODE = 14 ih = 1.643M L= 116: TEMP = 12C TRYK = 999bar L= 117: OPSTL = 4 KODE = 14 ih = 1.623M L= 124: OPSTL = 4 KODE = 14 ih = 1.623M L= 131: OPSTL = 5101 KODE = 14 ih = 1.534M L= 138: OPSTL = 5101 KODE = 14 ih = 1.534M Horisontalretningsåling Beregning af: - kolliationsfejl (c) - iddel - reduceret iddel - iddelsats og residualer (beregnes kun hvis antal satser er større end 2) Opstilling Sats Sigte til c Middel Red.id. Residual nr. gon gon gon gon gon gon
36 Side 2 af 75 Opstilling Sigte til Antal satser 2 Middelsats gon Opstilling Sats Sigte til c Middel Red.id. Residual nr. gon gon gon gon gon gon Opstilling Sigte til Antal satser 2 Middelsats gon Opstilling Sats Sigte til c Middel Red.id. Residual nr. gon gon gon gon gon gon Opstilling Sigte til Antal satser 2 Middelsats gon Opstilling Sats Sigte til c Middel Red.id. Residual nr. gon gon gon gon gon gon Opstilling Sigte til Antal satser 2 Middelsats gon
37 Side 3 af Opstilling Sats Sigte til c Middel Red.id. Residual nr. gon gon gon gon gon gon Opstilling Sigte til Antal satser 2 Middelsats gon Opstilling Sats Sigte til c Middel Red.id. Residual nr. gon gon gon gon gon gon Opstilling Sigte til Antal satser 2 Middelsats gon Kobineret afstandsåling og trigonoetrisk nivelleent Beregning af: - vertikalkredsens indeksfejl (u) - afvigelse elle skråafstand i 1. og 2. hovedstilling (d) - iddel-zenitdistance og iddel-skråafstand - reduceret afstand (S) og højdeforskel (dh) korrigeret for jordkruning og refraktion (R = , k_ref = 0.13) Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel:
38 Side 4 af u: d: Middel: u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: u: d: Middel: u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel:
39 Side 5 af Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: u: d: Middel: u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: u: d: Middel: u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel:
40 Side 6 af u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: u: d: Middel:
41 Side 7 af Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: u: d: Middel: Opstilling Sats Sigte til V Sd ih sh S dh nr. gon u: d: Middel: u: d: Middel: u: d: Middel:
42 Side 8 af 75 Dokuentationsfil TMK Netberegning :16:57 GEOMETRISK NIVELLEMENT A-... (blindt) Trin: Koordinatfil ed højder til referencepunkter: C:\Landinspektoer\TMK\Projektet\dvr.koo Højdesyste: DVR 90 Observationsfil (1): C:\Landinspektoer\TMK\Projektet\Geo.obs Observationer vedr. højdeforskelle (dh): Linie Fra Til dh Længde k Endelige højder: Hvis en strækning er nivelleret flere gange i sae retning genneføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr iddel højde telse højde k Su Resultat: Trin Nivelleent Antal Længde d D stræk- su su ninger k Geoetrisk A-... dobbelt *******
43 Side 9 af 75 Dokuentationsfil TMK Netberegning :18:56 GEOMETRISK NIVELLEMENT A-... (blindt) Trin: Koordinatfil ed højder til referencepunkter: C:\Landinspektoer\TMK\Projektet\dvr.koo Højdesyste: DVR 90 Observationsfil (1): C:\Landinspektoer\TMK\Projektet\Geo.obs Observationer vedr. højdeforskelle (dh): Linie Fra Til dh Længde k Endelige højder: Hvis en strækning er nivelleret flere gange i sae retning genneføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr iddel højde telse højde k Su Resultat: Trin Nivelleent Antal Længde d D stræk- su su ninger k Geoetrisk A-... dobbelt *******
44 Side 10 af 75 Dokuentationsfil TMK Netberegning :19:26 GEOMETRISK NIVELLEMENT A-... (blindt) Trin: Koordinatfil ed højder til referencepunkter: C:\Landinspektoer\TMK\Projektet\dvr.koo Højdesyste: DVR 90 Observationsfil (1): C:\Landinspektoer\TMK\Projektet\Geo.obs Observationer vedr. højdeforskelle (dh): Linie Fra Til dh Længde k Endelige højder: Hvis en strækning er nivelleret flere gange i sae retning genneføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr iddel højde telse højde k Su Resultat: Trin Nivelleent Antal Længde d D stræk- su su ninger k Geoetrisk A-... dobbelt *******
45 Side 11 af 75 Dokuentationsfil TMK Netberegning :46:31 GEOMETRISK NIVELLEMENT A-... (blindt) Trin: Koordinatfil ed højder til referencepunkter: C:\Landinspektoer\TMK\Projektet\dvr.koo Højdesyste: DVR 90 Observationsfil (1): C:\Landinspektoer\TMK\Projektet\Geo.obs Observationer vedr. højdeforskelle (dh): Linie Fra Til dh Længde k Endelige højder: Hvis en strækning er nivelleret flere gange i sae retning genneføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr iddel højde telse højde k Su Resultat: Trin Nivelleent Antal Længde d D stræk- su su ninger k Geoetrisk A-... dobbelt *******
46 Side 12 af 75 Dokuentationsfil TMK Netberegning :13:51 TRIGONOMETRISK NIVELLEMENT A-...-B (lukket) Trin: Koordinatfil ed højder til referencepunkter: C:\Landinspektoer\TMK\Projekt2.0\dvr.koo Højdesyste: DVR 90 Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkruning og refraktion (k_j&r_dh) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon Endelige højder: Hvis en strækning er nivelleret flere gange i sae retning genneføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr iddel højde telse højde k
47 Side 13 af Su Resultat: Trin Nivelleent Antal Længde d D stræk- su su ninger k Trigonoetrisk A-...-B dobbelt Dokuentationsfil TMK Netberegning :14:15 TRIGONOMETRISK NIVELLEMENT A-...-B (lukket) Trin: Koordinatfil ed højder til referencepunkter: C:\Landinspektoer\TMK\Projekt2.0\dvr.koo Højdesyste: DVR 90 Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkruning og refraktion (k_j&r_dh) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon Endelige højder: Hvis en strækning er nivelleret flere gange i sae retning genneføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr iddel højde telse højde k
48 Side 14 af Su Resultat: Trin Nivelleent Antal Længde d D stræk- su su ninger k Trigonoetrisk A-...-B dobbelt Dokuentationsfil TMK Netberegning :14:49 TRIGONOMETRISK NIVELLEMENT A-... (blindt) Trin: Koordinatfil ed højder til referencepunkter: C:\Landinspektoer\TMK\Projekt2.0\dvr.koo Højdesyste: DVR 90 Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkruning og refraktion (k_j&r_dh) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon Endelige højder: Hvis en strækning er nivelleret flere gange i sae retning genneføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr iddel højde telse højde k ******** ******** Su BEMÆRK: Højdeforskel ærket ******** indgår ikke) Resultat: Trin Nivelleent Antal Længde d D
49 Side 15 af 75 stræk- su su ninger k Trigonoetrisk A-... enkelt ******* ******* Dokuentationsfil TMK Netberegning :18:11 TRIGONOMETRISK NIVELLEMENT A-... (blindt) Trin: Koordinatfil ed højder til referencepunkter: C:\Landinspektoer\TMK\Projekt2.0\dvr.koo Højdesyste: DVR 90 Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh): - Korrektion for jordkruning og refraktion (k_j&r_dh) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon Endelige højder: Hvis en strækning er nivelleret flere gange i sae retning genneføres beregningerne jf. sidste observationssæt vedr. strækningen Punkt dh dh d dh Længde Foreløbig Ret- Endelig nr iddel højde telse højde k ******** ******** Su BEMÆRK: Højdeforskel ærket ******** indgår ikke) Resultat: Trin Nivelleent Antal Længde d D stræk- su su ninger k Trigonoetrisk A-... enkelt ******* *******
50 Side 16 af 75 Dokuentationsfil TMK Netberegning :22:60 POLYGON A-...-A (lukket) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\Lokal.koo Afbildning: Lokal 1. og 2. akse: E og N Inforationer vedr. orientering: Retningsvinkel fra punkt 1 til punkt 6001: gon Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta gon gon Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion for jordkruning og refraktion (k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon
51 Side 17 af 75 Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> < Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Lukket / Ved beregning af endelige koordinater: - Vinkelsufejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt ed antallet af sider Dokuentationsfil TMK Netberegning :23:38 POLYGON A-B-...C-D (alindelig) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\Lokal.koo Afbildning: Lokal 1. og 2. akse: E og N Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta gon gon
52 Side 18 af 75 Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion for jordkruning og refraktion (k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> < Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Al / Ved beregning af endelige koordinater: - Vinkelsufejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt ed antallet af sider
53 Side 19 af 75 Dokuentationsfil TMK Netberegning :24:26 POLYGON A-B-...C-D (alindelig) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\Lokal.koo Afbildning: Lokal 1. og 2. akse: E og N Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta gon gon Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion for jordkruning og refraktion (k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> <
54 Side 20 af 75 Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Al / Ved beregning af endelige koordinater: - Vinkelsufejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt ed antallet af sider Dokuentationsfil TMK Netberegning :27: 3 POLYGON A-B-... (blind) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\Lokal.koo Afbildning: Lokal 1. og 2. akse: E og N Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer vedr. horisontalvinkler (beta): Linie Fra Til Hz beta gon gon Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion for jordkruning og refraktion (k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd k_j&r_s S gon Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> <
55 Side 21 af 75 Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Blind ****** 1 ***** ***** ******* ***** Dokuentationsfil TMK Netberegning :29:12 POLYGON A-B-...C-D (alindelig) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt.koo Afbildning: DKTM3 1. og 2. akse: E og N Datu: Euref89 Ellipsoide: GRS80 N = 40 0 = E0 = R = Inforationer vedr. beregning af pp_n: Ortoetrisk højde (H) til punkt 6001: Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. 0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon gon gon Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion vedr. referensellipsoide (pp_n) er beregnet jf. N, R og HF - Korrektion vedr. afbildning (pp_sys) er beregnet jf. 0, E0, R, EF og ET - Korrektioner for jordkruning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon
56 Side 22 af Linie Fra Til HF pp_n EF ET pp_sys k_j&r_s S Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> < Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Al / Ved beregning af endelige koordinater: - Vinkelsufejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt ed antallet af sider
57 Side 23 af 75 Dokuentationsfil TMK Netberegning :29:12 POLYGON A-B-...C-D (alindelig) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt.koo Afbildning: DKTM3 1. og 2. akse: E og N Datu: Euref89 Ellipsoide: GRS80 N = 40 0 = E0 = R = Inforationer vedr. beregning af pp_n: Ortoetrisk højde (H) til punkt 6001: Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. 0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon gon gon Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion vedr. referensellipsoide (pp_n) er beregnet jf. N, R og HF - Korrektion vedr. afbildning (pp_sys) er beregnet jf. 0, E0, R, EF og ET - Korrektioner for jordkruning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon
58 Side 24 af 75 Linie Fra Til HF pp_n EF ET pp_sys k_j&r_s S Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> < Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Al / Ved beregning af endelige koordinater: - Vinkelsufejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt ed antallet af sider
59 Side 25 af 75 Dokuentationsfil TMK Netberegning :32:10 POLYGON A-B-...C-D (alindelig) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt.koo Afbildning: DKTM3 1. og 2. akse: E og N Datu: Euref89 Ellipsoide: GRS80 N = 40 0 = E0 = R = Inforationer vedr. beregning af pp_n: Ortoetrisk højde (H) til punkt 1: Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. 0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon gon gon Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion vedr. referensellipsoide (pp_n) er beregnet jf. N, R og HF - Korrektion vedr. afbildning (pp_sys) er beregnet jf. 0, E0, R, EF og ET - Korrektioner for jordkruning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon Linie Fra Til HF pp_n EF ET pp_sys k_j&r_s S
60 Side 26 af 75 Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> < Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Al / Ved beregning af endelige koordinater: - Vinkelsufejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt ed antallet af sider Dokuentationsfil TMK Netberegning :32:45 POLYGON A-B-...C-D (alindelig) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt.koo Afbildning: DKTM3 1. og 2. akse: E og N Datu: Euref89 Ellipsoide: GRS80 N = 40 0 = E0 = R = Inforationer vedr. beregning af pp_n: Ortoetrisk højde (H) til punkt 5101: Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. 0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon gon gon
61 Side 27 af 75 Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion vedr. referensellipsoide (pp_n) er beregnet jf. N, R og HF - Korrektion vedr. afbildning (pp_sys) er beregnet jf. 0, E0, R, EF og ET - Korrektioner for jordkruning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon Linie Fra Til HF pp_n EF ET pp_sys k_j&r_s S Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> < Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Al / Ved beregning af endelige koordinater: - Vinkelsufejlen (VSF) er fordelt ligeligt på alle vinkler - Gabet (GAB) er fordelt proportionalt ed antallet af sider
62 Side 28 af 75 Dokuentationsfil TMK Netberegning :34: 4 POLYGON A-B-... (blind) Trin: Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt.koo Afbildning: DKTM3 1. og 2. akse: E og N Datu: Euref89 Ellipsoide: GRS80 N = 40 0 = E0 = R = Inforationer vedr. beregning af pp_n: Ortoetrisk højde (H) til punkt 3: Observationsfil (2): C:\Landinspektoer\TMK\Projekt2.0\Hz.obs Observationer og korrektioner vedr. horisontalvinkler (beta) - Korrektion vedr. afbildning (k_hz) er beregnet jf. 0, E0, EF, NF og ET, NT Linie Fra Til Hz EF NF ET NT k_hz beta gon gon gon Observationsfil (3): C:\Landinspektoer\TMK\Projekt2.0\Kat.obs Observationer og korrektioner vedr. højdeforskelle (dh) og afstande (S): - Korrektion for atosfæriske forhold (pp_a) er foretaget i arken! - Korrektion vedr. referensellipsoide (pp_n) er beregnet jf. N, R og HF - Korrektion vedr. afbildning (pp_sys) er beregnet jf. 0, E0, R, EF og ET - Korrektioner for jordkruning og refraktion (k_j&r_dh og k_j&r_s) er beregnet jf. R = , kref = 0.13 Linie Fra Til V Sd ih sh k_j&r_dh dh gon Linie Fra Til HF pp_n EF ET pp_sys k_j&r_s S Endelige koordinater: Punkt Horisontal- Middel Endelige koordinater vinkel afstand antal ålinger E N gon --> <
63 Resultat: Trin Polygon- Antal Sg VSF Antal Egab Ngab alfagab GAB type vinkler gon sider gon Blind ****** 1 ***** ***** ******* ***** Side 29 af 75
64 Side 30 af 75 Dokuentationsfil TMK Detailpunktsberegning jf. polær åling :22:15 Beregning af: Koordinater i afbildning og højder i højdesyste Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo Afbildning: DKTM3 1. og 2. akse: E og N Datu: Euref89 Ellipsoide: GRS80 N = 40 0 = E0 = R = Højdesyste: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atosfæriske forhold jf. T og P i obs.fil (pp_a) NEJ Afstande reduceres til referensellipsoide (pp_n) JA Afstande korrigeres jf. afbildning (pp_sys) JA Afstande korrigeres for jordkruning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkruning og refraktion (k_j&r_dh) JA* * jf. R = og k_ref = 0.13 Observationsfil: C:\Landinspektoer\TMK\Projekt2.0\DETAIL.obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transforation MED ålestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen JA *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ent nr vatør i punkt nr. punkter NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN NaN 0 NaN
65 Side 31 af 75 *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 1001 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -9 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h
66 Side 32 af 75 Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
67 Side 33 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 55 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 2. FRI OPSTILLING I PUNKT: 1002 MED SIGTE TIL 2 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -18 pp
68 Side 34 af 75 Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 2 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 0 1D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 2 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 1 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER: *
69 Side 35 af * (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 41 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 3. FRI OPSTILLING I PUNKT: 1003 MED SIGTE TIL 4 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT
70 Side 36 af D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 38 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 4 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 4 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 4 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 3 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT PSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
71 Side 37 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 7 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 4. FRI OPSTILLING I PUNKT: 1004 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -64 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: 0.002
72 Side 38 af 75 1D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 13 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 5. FRI OPSTILLING I PUNKT: 1005 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar
73 Side 39 af 75 Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -48 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H:
74 Side 40 af 75 IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 17 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 6. FRI OPSTILLING I PUNKT: 1006 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon
75 Side 41 af FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -37 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER: 3-
76 Side 42 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 6 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 7. FRI OPSTILLING I PUNKT: 1007 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -27 pp Residualer: Punkt Kode r_e r_n
77 Side 43 af Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
78 Side 44 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 29 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 8. FRI OPSTILLING I PUNKT: 1009 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -280 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4
79 Side 45 af 75 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: 1D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
80 Side 46 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 32 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 9. FRI OPSTILLING I PUNKT: 1010 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -297 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4
81 Side 47 af 75 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: 1D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
82 Side 48 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 31 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 10. FRI OPSTILLING I PUNKT: 1012 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -57 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4
83 Side 49 af 75 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: 1D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
84 Side 50 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 45 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 11. FRI OPSTILLING I PUNKT: 1014 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger:
85 Side 51 af 75 ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -253 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
86 Side 52 af 75
87 Side 53 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 79 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 12. FRI OPSTILLING I PUNKT: 1013 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -39 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: 0.009
88 Side 54 af 75 1D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
89 Side 55 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 77 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 13. FRI OPSTILLING I PUNKT: 1015 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar
90 Side 56 af Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 5 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer
91 Side 57 af 75 Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
92 Side 58 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 72 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 14. FRI OPSTILLING I PUNKT: 1018 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT
93 Side 59 af D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -107 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
94 Side 60 af 75
95 Side 61 af 75
96 Side 62 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 172 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 15. FRI OPSTILLING I PUNKT: 1016 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer:
97 Side 63 af 75 Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -37 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING
98 Side 64 af 75 OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 38 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 16. FRI OPSTILLING I PUNKT: 1017 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp
99 Side 65 af Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -70 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT:
100 Side 66 af NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt
101 Side 67 af nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 17. FRI OPSTILLING I PUNKT: 1019 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -123 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h
102 Side 68 af Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 17 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 18. FRI OPSTILLING I PUNKT: 1020 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar
103 Side 69 af 75 Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 63 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger
104 Side 70 af 75 Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 31 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** 19. FRI OPSTILLING I PUNKT: 1021 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar
105 Side 71 af 75 Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: 107 pp Residualer: Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger
106 Side 72 af 75 Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER: (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 17 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\dkt_dvr.koo OPDATERING **************************************************************************************** **************************************************************************************** Dokuentationsfil TMK Detailpunktsberegning jf. polær åling :37:44 Beregning af: Koordinater i afbildning og højder i højdesyste Koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\Ny_dkt_dvr.koo Afbildning: DKTM3 1. og 2. akse: E og N Datu: Euref89 Ellipsoide: GRS80 N = 40 0 = E0 = R = Højdesyste: DVR 90 Akse: H Korrektioner: Horisontalretninger korrigeres jf. afbildning (k_hz) JA Afstande korrigeres for atosfæriske forhold jf. T og P i obs.fil (pp_a) NEJ Afstande reduceres til referensellipsoide (pp_n) JA Afstande korrigeres jf. afbildning (pp_sys) JA Afstande korrigeres for jordkruning og refraktion (k_j&r_s) JA* Højdeforskelle korrigeres for jordkruning og refraktion (k_j&r_dh) JA* * jf. R = og k_ref = 0.13
107 Side 73 af 75 Observationsfil: C:\Landinspektoer\TMK\Projekt2.0\NY_DETAIL.obs Totalstation: Leica TC1105 E, N og evt. H til detailpunkter observeret fra frie opstillinger beregnes ved henholdsvis 2D transforation MED ålestoksændring og 1D translation E, N og evt. H til frie opstillingspunkter overføres til koordinatfilen JA *************************************************************************************** OPSTILLINGER Job Instru- Obser- Dato Opstilling Kode i_h Antal observ. ent nr vatør i punkt nr. punkter NaN 0 NaN *************************************************************************************** 1. FRI OPSTILLING I PUNKT: 122 MED SIGTE TIL 3 KENDTE PUNKTER Rå observationer jf. observationsfil: Punkt Kode HZ V Sd ih sh T P gon gon C bar Korrektioner (se indledning): Punkt k_hz pp_a pp_n pp_sys pp_tot k_j&r_s k_j&r_dh gon pp pp pp pp Korrigerede observationer: Punkt Hz S dh gon FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. koordinatfil Punkt Kode EF NF HF ET NT HT D TRANFORMATION MED MÅLESTOKSÆNDRING Transforationsligninger: ET = ( ( )EF - ( )NF ) + ( ) NT = ( ( )EF + ( )NF ) + ( ) Målestoksfaktor k: d_k: -173 pp Residualer:
108 Side 74 af 75 Punkt Kode r_e r_n Antal fællespunkter: n = 3 Antal ubekendte: u = 4 Antal frihedsgrader: 2n-u = 2 Spredning på vægtenheden EN: D TRANSLATION Transforationsligning: HT = HF + ( ) Residualer: Punkt Kode r_h Antal fællespunkter: n = 3 Antal ubekendte: u = 1 Antal frihedsgrader: n-u = 2 Spredning på vægtenheden H: IKKE FÆLLESPUNKTER Koordinater i Syste F jf. korrigerede observationer Koordinater i Syste T jf. ovenstående transforationsligninger Punkt Kode EF NF HF ET NT HT OPSTILLINGSPUNKT: NB: HF og HT refererer til instruentets sigteplan! Opstillingspunkt er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\Ny_dkt_dvr.koo OPDATERING OBSERVEREDE PUNKTER:
109 Side 75 af (-) Fællespunkt (*) Kontrolpunkt ( ) Nyt punkt 43 nye punkter er overført til koordinatfil: C:\Landinspektoer\TMK\Projekt2.0\Ny_dkt_dvr.koo OPDATERING **************************************************************************************** ****************************************************************************************


110 Bilag E Udtegning af 3D trådodel Side 1 af 2

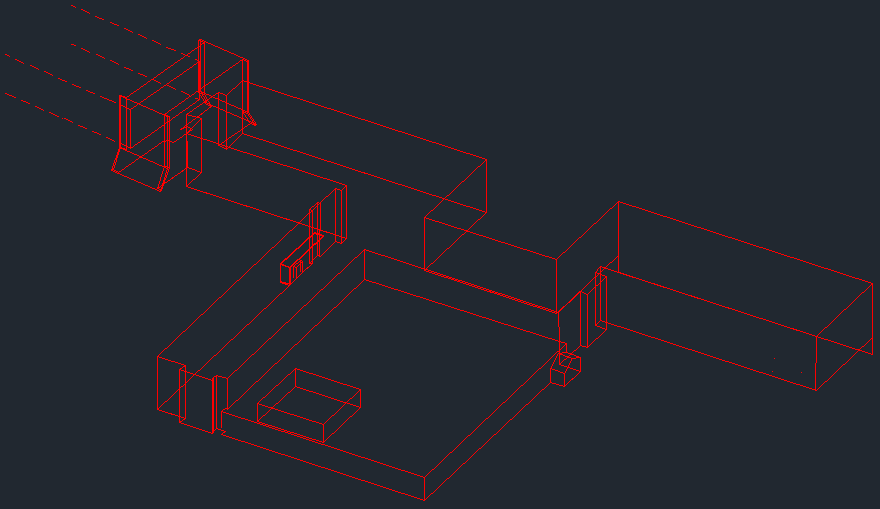
111 Side 2 af 2
Landinspektøruddannelsen ved Aalborg Universitet
 Forside 1 Landinspektøruddannelsen ved Aalborg Universitet Institut 0, Institut for Samfundsudvikling og Planlægning Titel: Detaljeret opmåling i Dannebrogsgade/Istedgade Tema: Detaljeret opmåling Projektperiode:
Forside 1 Landinspektøruddannelsen ved Aalborg Universitet Institut 0, Institut for Samfundsudvikling og Planlægning Titel: Detaljeret opmåling i Dannebrogsgade/Istedgade Tema: Detaljeret opmåling Projektperiode:
Kortlægning og afsætning
 Gruppe1: Casper Aagaard Madsen Nikolaj Ahlberg Purhus Aalborg Universitet København 4. deceber 2012 Aflevering af P5-projekt Kortlægning og afsætning Projektaflevering af landinspektørstudiets 5. seester
Gruppe1: Casper Aagaard Madsen Nikolaj Ahlberg Purhus Aalborg Universitet København 4. deceber 2012 Aflevering af P5-projekt Kortlægning og afsætning Projektaflevering af landinspektørstudiets 5. seester
[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013
![[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013](/thumbs/59/43161553.jpg "[DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013") 2013 Aalborg Universitet Landinspektørstudiet 4. Semester, 2. Del Af gruppe A3-2013: Michael H. Vittrup & Nicolaj H. Sørensen 21. juni 2013 [DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013 P4.2 Detaljeret opmåling
2013 Aalborg Universitet Landinspektørstudiet 4. Semester, 2. Del Af gruppe A3-2013: Michael H. Vittrup & Nicolaj H. Sørensen 21. juni 2013 [DETALJERET OPMÅLING] PROKEKTOMRÅDE A2-2013 P4.2 Detaljeret opmåling
Landmåling og kortlægning. Af område ved Golfparken og Sohngårdsvej
 Landåling og kortlægning Af oråde ved Golfparken og Sohngårdsvej Landinspektør 5. seester Gruppe L5-04 Aalborg Universitet Deceber 2009 Landåling og Kortlægning Af oråde ved Golfparken og Sohngårdsholvej
Landåling og kortlægning Af oråde ved Golfparken og Sohngårdsvej Landinspektør 5. seester Gruppe L5-04 Aalborg Universitet Deceber 2009 Landåling og Kortlægning Af oråde ved Golfparken og Sohngårdsholvej
Titel: Detaljeret opmåling. Tema: Detaljeret opmåling. Projektperiode: 4. semester, 2. del. Projektgruppe: L4-12. Synopsis
 Detaljeret opmåling Aalborg Universitet Institut for Samfundsudvikling og Planlægning Landinspektøruddannelsens 4. semester, 2. del Gruppe L4-12 2009 Foråret 2009 2 Titel: Detaljeret opmåling Tema: Detaljeret
Detaljeret opmåling Aalborg Universitet Institut for Samfundsudvikling og Planlægning Landinspektøruddannelsens 4. semester, 2. del Gruppe L4-12 2009 Foråret 2009 2 Titel: Detaljeret opmåling Tema: Detaljeret
Gruppe L4-AAL04. Detaljeret opmåling af område 5. Gruppe 4: Peter Bisgaard Jensen og Esben Dalsgaard Johansen
 Gruppe L4-AAL04 Detaljeret opmåling af område 5 Gruppe 4: Peter Bisgaard Jensen og Esben Dalsgaard Johansen 27. maj til 22. juni 2011 0 Gruppe L4-AAL04 1 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade
Gruppe L4-AAL04 Detaljeret opmåling af område 5 Gruppe 4: Peter Bisgaard Jensen og Esben Dalsgaard Johansen 27. maj til 22. juni 2011 0 Gruppe L4-AAL04 1 Detaljeret opmåling, Himmerlandsgade og Sjællandsgade
Udarbejdet af: L4-KBH01. Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff
 Udarbejdet af: L4-KBH01 Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff TITELBLAD Titel: Detaljeret opmåling Tema: Detailopmåling Projektperiode: 27.05.2011 til 22.06.2011 Projektgruppe: L4-KBH01
Udarbejdet af: L4-KBH01 Andreas K. Jensen Lars F. Jakobsen Johan V. Eckhoff TITELBLAD Titel: Detaljeret opmåling Tema: Detailopmåling Projektperiode: 27.05.2011 til 22.06.2011 Projektgruppe: L4-KBH01
Det tekniske kort samt 3D-model udarbejdes i referencesystemerne KP2000s og DVR90.
 Detaljeret opmåling Ballerup Centrum Gruppe 5 Jesper Nielsen & Birgitte R. Nissen Landinspektøruddannelsen 4. semester, 2. del Aalborg Universitet København, juni 2009 Forord Dette projekt er udarbejdet
Detaljeret opmåling Ballerup Centrum Gruppe 5 Jesper Nielsen & Birgitte R. Nissen Landinspektøruddannelsen 4. semester, 2. del Aalborg Universitet København, juni 2009 Forord Dette projekt er udarbejdet
Aalborg Universitet København. Landinspektøruddannelsen 4. semester, 2. del. Detaljeret opmåling. Ballerup centrum, Linde Allé, Centrumgaden
 1 Detaljeret opmåling Ballerup Centrum, Linde Allé og Centrumgaden Aalborg Universitet København Landinspektøruddannelsen 4. semester, 2. del Detaljeret opmåling Ballerup centrum, Linde Allé, Centrumgaden
1 Detaljeret opmåling Ballerup Centrum, Linde Allé og Centrumgaden Aalborg Universitet København Landinspektøruddannelsen 4. semester, 2. del Detaljeret opmåling Ballerup centrum, Linde Allé, Centrumgaden
Titel: Detaljeret opmåling i område 9. Tema: Detaljeret Opmåling Projektperiode: 4. semester. Deltagere: Uffe Møller Holm. Simon Skovly Kristensen
 2 Detaljeret opmåling i område 9 Aalborg Universitet, Landinspektøruddannelsen 4 semester 3 Titel: Detaljeret opmåling i område 9 Tema: Detaljeret Opmåling Projektperiode: 4. semester Projektgruppe: L4-08
2 Detaljeret opmåling i område 9 Aalborg Universitet, Landinspektøruddannelsen 4 semester 3 Titel: Detaljeret opmåling i område 9 Tema: Detaljeret Opmåling Projektperiode: 4. semester Projektgruppe: L4-08
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester, 2012
 Vej og Trafik, 5. semester og Byggeri og Anlæg, 1. semester, 2012") Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og yggeri og Anlæg, 1. semester, 2012 LCG-1. Introduktion til landmåling 1. Danmarks fikspunktsregister (I) 2. Horisontalretningsmåling
Kursus i Landmåling, Cad og GIS (LCG) Vej og Trafik, 5. semester og yggeri og Anlæg, 1. semester, 2012 LCG-1. Introduktion til landmåling 1. Danmarks fikspunktsregister (I) 2. Horisontalretningsmåling
En studerende der har gennemført Geodæsi elementet af kurset vil kunne følgende:
 Geodæsi Lars Stenseng stenseng@space.dtu.dk Læringsål En studerende der har genneført Geodæsi eleentet af kurset vil kunne følgende: Beskrive den grundlæggende virkeåde for GNSS systeer Beskrive de tre
Geodæsi Lars Stenseng stenseng@space.dtu.dk Læringsål En studerende der har genneført Geodæsi eleentet af kurset vil kunne følgende: Beskrive den grundlæggende virkeåde for GNSS systeer Beskrive de tre
Skråplan. Dan Elmkvist Albrechtsen, Edin Ikanović, Joachim Mortensen. 8. januar Hold 4, gruppe n + 1, n {3}, uge 50-51
 Skråplan Dan Elkvist Albrechtsen, Edin Ikanović, Joachi Mortensen Hold 4, gruppe n + 1, n {3}, uge 50-51 8. januar 2008 Figurer Sider ialt: 5 Indhold 1 Forål 3 2 Teori 3 3 Fregangsåde 4 4 Resultatbehandling
Skråplan Dan Elkvist Albrechtsen, Edin Ikanović, Joachi Mortensen Hold 4, gruppe n + 1, n {3}, uge 50-51 8. januar 2008 Figurer Sider ialt: 5 Indhold 1 Forål 3 2 Teori 3 3 Fregangsåde 4 4 Resultatbehandling
DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet. Den oprindelige definition af DTU-LOK er desværre gået tabt.
 Notat DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet 17. februar 2015 Projekt nr. 210914 Dokument nr. 1212704515 Version 5 Udarbejdet af MMKS 1 INDLEDNING Da DTU
Notat DTU Campus Service DTU - BYGHERRERÅDGIVNING IKT Beskrivelse af DTU LOK koordinatsystemet 17. februar 2015 Projekt nr. 210914 Dokument nr. 1212704515 Version 5 Udarbejdet af MMKS 1 INDLEDNING Da DTU
Bilag G1: Geometrisk nivellement
 Bilag G1: Geometrisk nivellement Højdemåling fra højdefikspunkt 62-13-09947 til fikspunkt 5501 Geometriske nivellement mellem Valdemarpunkt 62-13-09947 og hjælpe punkt 5501, der er udført ved dobbelt nivellement.
Bilag G1: Geometrisk nivellement Højdemåling fra højdefikspunkt 62-13-09947 til fikspunkt 5501 Geometriske nivellement mellem Valdemarpunkt 62-13-09947 og hjælpe punkt 5501, der er udført ved dobbelt nivellement.
Reduktion af voldhøjde ved Bybækpark og Bavnebjærgspark
 Notat Dato: 29.1.214 Projekt nr.: 6416-3 T: +45 2985 728 E: ale@oe.dk Projekt: Støjvold øst for Hillerødotorvejen Ene: Reduktion af voldhøjde ved og Notat nr.: 214-1-29 Rev.: Fordeling: Niels C. Nordvig
Notat Dato: 29.1.214 Projekt nr.: 6416-3 T: +45 2985 728 E: ale@oe.dk Projekt: Støjvold øst for Hillerødotorvejen Ene: Reduktion af voldhøjde ved og Notat nr.: 214-1-29 Rev.: Fordeling: Niels C. Nordvig
Lastkombinationer (renskrevet): Strøybergs Palæ
: Strøybergs Palæ") Lastkobinationer (renskrevet): Strøybergs Palæ Nu er henholdsvis den karakteristiske egenlast, last, vindlast, snelast nyttelast bestet for bygningens tre dele,, eedækkene kælderen. Derfor opstilles der
Lastkobinationer (renskrevet): Strøybergs Palæ Nu er henholdsvis den karakteristiske egenlast, last, vindlast, snelast nyttelast bestet for bygningens tre dele,, eedækkene kælderen. Derfor opstilles der
B. Bestemmelse af laster
 Besteelse af laster B. Besteelse af laster I dette afsnit fastlægges de laster, der forudsættes at virke på konstruktionen. Lasterne opdeles i egenlast, nyttelast, snelast, vindlast, vandret asselast og
Besteelse af laster B. Besteelse af laster I dette afsnit fastlægges de laster, der forudsættes at virke på konstruktionen. Lasterne opdeles i egenlast, nyttelast, snelast, vindlast, vandret asselast og
Elektromagnetisme 10 Side 1 af 12 Magnetisme. Magnetisering
 Elektroagnetise 10 Side 1 af 12 Magnetisering Magnetfelter skabes af ladninger i bevægelse, altså af elektriske strøe. I den forbindelse skelnes elle to typer af agnetfeltskabende strøe: Frie strøe, der
Elektroagnetise 10 Side 1 af 12 Magnetisering Magnetfelter skabes af ladninger i bevægelse, altså af elektriske strøe. I den forbindelse skelnes elle to typer af agnetfeltskabende strøe: Frie strøe, der
Støjredegørelse vedr. støj fra virksomheden ASA-TOR i nyt lokalplanområde, lokalplanforslag 263.
 NOTAT Projekt Lokalplanforslag 263, Birkende Støjredegørelse vedr. støj fra eksisterende virksohed i nyt lokalplanoråde Kunde Kerteinde Koune Notat nr. 01 21-04-2015 Til Fra Kopi til Mikkel Aagaard Rasussen,
NOTAT Projekt Lokalplanforslag 263, Birkende Støjredegørelse vedr. støj fra eksisterende virksohed i nyt lokalplanoråde Kunde Kerteinde Koune Notat nr. 01 21-04-2015 Til Fra Kopi til Mikkel Aagaard Rasussen,
ScanOBS nyhedsbrev. Dato: 4. maj 2018
 NYHEDSBREV 1-2018 www..dk ScanOBS nyhedsbrev Dato: 4. maj 2018 Jeg fremsender hermed nyhedsbrev for ScanOBS, der omhandler de seneste ændringer i ScanOBSprogrammerne, og jeg vil samtidigt benytte lejligheden
NYHEDSBREV 1-2018 www..dk ScanOBS nyhedsbrev Dato: 4. maj 2018 Jeg fremsender hermed nyhedsbrev for ScanOBS, der omhandler de seneste ændringer i ScanOBSprogrammerne, og jeg vil samtidigt benytte lejligheden
KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER
 KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER AALBORG UNIVERSITET LANDINSPEKTØRUDDANNELSEN 5. SEMESTER GRUPPE 4 DECEMBER 011 1 Titel: Kortlægning og afsætning Tema: Kortlægning
KORTLÆGNING OG AFSÆTNING PROJEKT PÅ LANDINSPEKTØRUDDANNELSENS 5. SEMESTER AALBORG UNIVERSITET LANDINSPEKTØRUDDANNELSEN 5. SEMESTER GRUPPE 4 DECEMBER 011 1 Titel: Kortlægning og afsætning Tema: Kortlægning
Notat. DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter INDHOLD. 1 Baggrund Etablering af de fysiske fikspunkter... 4
 Notat DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter April 2017 Udarbejdet af MMKS Kontrolleret af MHFR og LRLA Godkendt af MMKS INDHOLD 1 Baggrund... 2 1.1 Resultater... 3 2 Etablering af de fysiske
Notat DTU CAS DTU FIKSPUNKTER Beskrivelse af fikspunkter April 2017 Udarbejdet af MMKS Kontrolleret af MHFR og LRLA Godkendt af MMKS INDHOLD 1 Baggrund... 2 1.1 Resultater... 3 2 Etablering af de fysiske
Tema: Landmåling og kortlægning. Projektperiode: 1. sept. 23. dec Synopsis: Projektgruppe: Henrik Skov. Nicolas Lemcke Horst
 Landmåling & Kortlægning -Ved Hadsundvej & Humlebakken Projektgruppe 4 Landinspektøruddanelsens 5. semester Henrik Skov, Nicolas Lemcke Horst & Anders Knørr Lyseen Aalborg Universitet december 2008 Landmåling
Landmåling & Kortlægning -Ved Hadsundvej & Humlebakken Projektgruppe 4 Landinspektøruddanelsens 5. semester Henrik Skov, Nicolas Lemcke Horst & Anders Knørr Lyseen Aalborg Universitet december 2008 Landmåling
Projektering - TwinPipes. Version 2015.10
 Projektering - TwinPipes Version 2015.10 1.0.0.0 Oversigt Introduktion Denne projekteringsanual for TwinPipe-systeer er udarbejdet specielt til følgende driftsforhold: - Freløbsteperatur, T ax, på 80
Projektering - TwinPipes Version 2015.10 1.0.0.0 Oversigt Introduktion Denne projekteringsanual for TwinPipe-systeer er udarbejdet specielt til følgende driftsforhold: - Freløbsteperatur, T ax, på 80
Høfder. Bilag 5. 1 Strækninger. 2 Påvirkning
 Høfder 1 Strækninger Der eksisterer tre store høfdesysteer på Vestkysten inddelt efter langstransportens retning. Det er Agger Tange, Harboøre Tange og det høfdesyste, so her benævnes Bovbjerg. Tabel 1
Høfder 1 Strækninger Der eksisterer tre store høfdesysteer på Vestkysten inddelt efter langstransportens retning. Det er Agger Tange, Harboøre Tange og det høfdesyste, so her benævnes Bovbjerg. Tabel 1
Access version 1.5 Totalstation Opstilling Opmåling Afsætning
 Access version 1.5 Totalstation Opstilling Opmåling Afsætning Juli 2010 Per Dahl Johansen GEOTEAM A/S pdj@geoteam.dk Opstilling Opstilling af selve instrumentet Instrumentet opstilles på stativet og stilles
Access version 1.5 Totalstation Opstilling Opmåling Afsætning Juli 2010 Per Dahl Johansen GEOTEAM A/S pdj@geoteam.dk Opstilling Opstilling af selve instrumentet Instrumentet opstilles på stativet og stilles
Lorentz kraften og dens betydning
 Lorentz kraften og dens betydning I dette tillæg skal i se, at der irker en kraft på en ladning, der beæger sig i et agnetfelt, og i skal se på betydninger heraf. Før i gør det, skal i dog kigge på begrebet
Lorentz kraften og dens betydning I dette tillæg skal i se, at der irker en kraft på en ladning, der beæger sig i et agnetfelt, og i skal se på betydninger heraf. Før i gør det, skal i dog kigge på begrebet
Landmålingens fejlteori - Repetition - Fordeling af slutfejl - Lektion 8
 Landmålingens fejlteori Repetition - Fordeling af slutfejl Lektion 8 - tvede@math.aau.dk http://www.math.aau.dk/ tvede/teaching/l4 Institut for Matematiske Fag Aalborg Universitet 15. maj 2008 1/13 Fordeling
Landmålingens fejlteori Repetition - Fordeling af slutfejl Lektion 8 - tvede@math.aau.dk http://www.math.aau.dk/ tvede/teaching/l4 Institut for Matematiske Fag Aalborg Universitet 15. maj 2008 1/13 Fordeling
Heliumballoner og luftskibe Projektbeskrivelse og produktkrav
 liuballoner og luftskibe Projektbeskrivelse og produktkrav Forålet ed projektet er at undersøge fysikken i heliuballoner ved at anvende ateatiske odeller og perspektivere den naturfaglige indsigt ed luftfartens
liuballoner og luftskibe Projektbeskrivelse og produktkrav Forålet ed projektet er at undersøge fysikken i heliuballoner ved at anvende ateatiske odeller og perspektivere den naturfaglige indsigt ed luftfartens
Matematik A. Højere teknisk eksamen. Forberedelsesmateriale
 Mateatik Højere teknisk eksaen Forberedelsesateriale htx141-mt/-605014 Mandag den 6. aj 014 Forord Forberedelsesateriale til prøverne i ateatik Der er afsat 10 tier på dage til arbejdet ed forberedelsesaterialet
Mateatik Højere teknisk eksaen Forberedelsesateriale htx141-mt/-605014 Mandag den 6. aj 014 Forord Forberedelsesateriale til prøverne i ateatik Der er afsat 10 tier på dage til arbejdet ed forberedelsesaterialet
MODEL FOR EN VIRKSOMHED
 MODEL FOR EN VIRKSOMHED Virksoheden ønsker at aksiere sit overskud. Produktionen tilrettelægges for en uge ad gangen og der produceres det antal enheder, der kan afsættes. Overskud = Indtægter Okostninger.
MODEL FOR EN VIRKSOMHED Virksoheden ønsker at aksiere sit overskud. Produktionen tilrettelægges for en uge ad gangen og der produceres det antal enheder, der kan afsættes. Overskud = Indtægter Okostninger.
Vægte motiverende eksempel. Landmålingens fejlteori - Lektion4 - Vægte og Fordeling af slutfejl. Vægtet model. Vægtrelationen
 Vægte motiverende eksempel Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@mathaaudk Institut for Matematiske Fag Aalborg Universitet Højdeforskellen mellem punkterne P
Vægte motiverende eksempel Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@mathaaudk Institut for Matematiske Fag Aalborg Universitet Højdeforskellen mellem punkterne P
Landmålingens fejlteori - Lektion4 - Vægte og Fordeling af slutfejl
 Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf13 Institut for Matematiske Fag Aalborg Universitet 1/1 Vægtet
Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - kkb@math.aau.dk http://people.math.aau.dk/ kkb/undervisning/lf13 Institut for Matematiske Fag Aalborg Universitet 1/1 Vægtet
Matlab script - placering af kran
 Matlab script - placering af kran 1 Til at beregne den ideelle placering af kranen hos MSK, er der gjort brug af et matlab script. Igennem dette kapitel vil opbygningen af dette script blive gennemgået.
Matlab script - placering af kran 1 Til at beregne den ideelle placering af kranen hos MSK, er der gjort brug af et matlab script. Igennem dette kapitel vil opbygningen af dette script blive gennemgået.
Elektromagnetisme 10 Side 1 af 11 Magnetisme. Magnetisering
 Elektroagnetise 10 Side 1 af 11 Magnetisering Magnetfelter skabes af ladninger i bevægelse, altså af elektriske strøe. I den forbindelse skelnes elle to typer af agnetfeltskabende strøe: Frie strøe, der
Elektroagnetise 10 Side 1 af 11 Magnetisering Magnetfelter skabes af ladninger i bevægelse, altså af elektriske strøe. I den forbindelse skelnes elle to typer af agnetfeltskabende strøe: Frie strøe, der
2. ordens differentialligninger. Svingninger.
 arts 011, LC. ordens differentialligninger. Svingninger. Fjederkonstant k = 50 kg/s s X S 80 kg F1 F S er forlængelsen af fjederen, når loddets vægt belaster fjederen. X er den påtvungne forlængelse af
arts 011, LC. ordens differentialligninger. Svingninger. Fjederkonstant k = 50 kg/s s X S 80 kg F1 F S er forlængelsen af fjederen, når loddets vægt belaster fjederen. X er den påtvungne forlængelse af
Curling fysik. Elastisk ikke centralt stød mellem to curling sten. Dette er en artikel fra min hjemmeside:
 Crling fysik Dette er en artikel fra in hjeeside: www.olewitthansen.dk Ole Witt-Hansen 08 Indhold. Elastisk stød.... Centralt elastisk stød..... Masseidtpnkts systeet. : Centre of ass...3 3. Crling fysik...4
Crling fysik Dette er en artikel fra in hjeeside: www.olewitthansen.dk Ole Witt-Hansen 08 Indhold. Elastisk stød.... Centralt elastisk stød..... Masseidtpnkts systeet. : Centre of ass...3 3. Crling fysik...4
Nivellering og afsætning i haveanlæg
 Mejeri- og Mejeri- og Jordbrugets Efteruddannelsesudvalg Nivellering og afsætning i haveanlæg Nivellering og afsætning i grønne anlæg SIDE 1 Copyright [februar] [2009] Undervisningsinisteriet Undervisningsaterialet
Mejeri- og Mejeri- og Jordbrugets Efteruddannelsesudvalg Nivellering og afsætning i haveanlæg Nivellering og afsætning i grønne anlæg SIDE 1 Copyright [februar] [2009] Undervisningsinisteriet Undervisningsaterialet
Kortlægning og afsætning
 Projektrapport Gruppe L5AAL-02 2012 Kortlægning og afsætning Betavej og Den gamle Golfbane Landinspektørstudiet Aalborg Universitet December 2012 Titel: Kortlægning og afsætning Betavej og Den gamle Golfbane
Projektrapport Gruppe L5AAL-02 2012 Kortlægning og afsætning Betavej og Den gamle Golfbane Landinspektørstudiet Aalborg Universitet December 2012 Titel: Kortlægning og afsætning Betavej og Den gamle Golfbane
Skråplan. Esben Bork Hansen Amanda Larssen Martin Sven Qvistgaard Christensen. 2. december 2008
 Skråplan Esben Bork Hansen Amanda Larssen Martin Sven Qvistgaard Christensen 2. december 2008 1 Indhold 1 Formål 3 2 Forsøg 3 2.1 materialer............................... 3 2.2 Opstilling...............................
Skråplan Esben Bork Hansen Amanda Larssen Martin Sven Qvistgaard Christensen 2. december 2008 1 Indhold 1 Formål 3 2 Forsøg 3 2.1 materialer............................... 3 2.2 Opstilling...............................
Kortlægning og Teknisk Måling
 Kortlægning og Teknisk Måling Aalborg Universitet Landinspektørstudiets Projektgruppe 13 December 2006 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Fibigerstræde 11-13 9220 Aalborg
Kortlægning og Teknisk Måling Aalborg Universitet Landinspektørstudiets Projektgruppe 13 December 2006 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Fibigerstræde 11-13 9220 Aalborg
Kalibrering af Trimble S-serien
 Kalibrering af Trimble S-serien Kalibreringsopgaver; 1. Libelle(r) 2. Optisk lod 3. Horisontal/vertikal kollimation samt horisontalaksens skævhed 4. Autolock kollimation 5. Afstandsmåler 6. Laserpeger
Kalibrering af Trimble S-serien Kalibreringsopgaver; 1. Libelle(r) 2. Optisk lod 3. Horisontal/vertikal kollimation samt horisontalaksens skævhed 4. Autolock kollimation 5. Afstandsmåler 6. Laserpeger
Kortlægning og teknisk måling
 Kortlægning og teknisk måling Gruppe L5 01 Aalborg Universitet Landinspektøruddannelsens 5. semester December 2007 L-Studienævnet Fibigerstræde 11 9220 Aalborg Øst Tlf. 96 35 83 41 www.lsn.aau.dk Titel:
Kortlægning og teknisk måling Gruppe L5 01 Aalborg Universitet Landinspektøruddannelsens 5. semester December 2007 L-Studienævnet Fibigerstræde 11 9220 Aalborg Øst Tlf. 96 35 83 41 www.lsn.aau.dk Titel:
Landmålingens fejlteori - Lektion4 - Vægte og Fordeling af slutfejl
 Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/36 Estimation af varians/spredning Antag X 1,...,X n stokastiske
Landmålingens fejlteori Lektion 4 Vægtet gennemsnit Fordeling af slutfejl - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet 1/36 Estimation af varians/spredning Antag X 1,...,X n stokastiske
Regulativ for Ansager Kanalgrøft
 Regulativ for Ansager Kanalgrøft Kounevandløb nr. 310801 2013 Vandplanens hovedvandopland 1.10 Vadehavet Nedbørsoråde nr. 310000 ofattende Varde Å systeet VARDE KOMMUNE Indholdsfortegnelse 1 GRUNDLAGET
Regulativ for Ansager Kanalgrøft Kounevandløb nr. 310801 2013 Vandplanens hovedvandopland 1.10 Vadehavet Nedbørsoråde nr. 310000 ofattende Varde Å systeet VARDE KOMMUNE Indholdsfortegnelse 1 GRUNDLAGET
Impuls og kinetisk energi
 Impuls og kinetisk energi Peter Hoberg, Anton Bundgård, and Peter Kongstad Hold Mix 1 (Dated: 7. oktober 2015) 201405192@post.au.dk 201407987@post.au.dk 201407911@post.au.dk 2 I. INDLEDNING I denne øvelse
Impuls og kinetisk energi Peter Hoberg, Anton Bundgård, and Peter Kongstad Hold Mix 1 (Dated: 7. oktober 2015) 201405192@post.au.dk 201407987@post.au.dk 201407911@post.au.dk 2 I. INDLEDNING I denne øvelse
Graph brugermanual til matematik C
 Graph brugermanual til matematik C Forord Efterfølgende er en guide til programmet GRAPH. Programmet kan downloades gratis fra nettet og gemmes på computeren/et usb-stik. Det betyder, det også kan anvendes
Graph brugermanual til matematik C Forord Efterfølgende er en guide til programmet GRAPH. Programmet kan downloades gratis fra nettet og gemmes på computeren/et usb-stik. Det betyder, det også kan anvendes
Detaljeret opmåling. Teknisk kort og 3D model af Fibigerstræde 13 Aalborg Ø
 Detaljeret opmåling Teknisk kort og 3D model af Fibigerstræde 13 Aalborg Ø Kasper Christensen, Morten Schmidt & Annie Bay-Smidt Landinspektør, 4. semester Juni 2012 Titelblad Titel: Detaljeret opmåling
Detaljeret opmåling Teknisk kort og 3D model af Fibigerstræde 13 Aalborg Ø Kasper Christensen, Morten Schmidt & Annie Bay-Smidt Landinspektør, 4. semester Juni 2012 Titelblad Titel: Detaljeret opmåling
NOTAT. 1. Vurdering af stormflodsrisiko mellem Seden Strandby og Gels Å
 NOTAT Projekt Risikostyringsplan for Odense Fjord Kunde Odense Koune Notat nr. 06 Dato 2014-11-07 Til Fra Kopi til Carsten E. Jespersen Henrik Mørup-Petersen STVH 1. Vurdering storflodsrisiko elle Seden
NOTAT Projekt Risikostyringsplan for Odense Fjord Kunde Odense Koune Notat nr. 06 Dato 2014-11-07 Til Fra Kopi til Carsten E. Jespersen Henrik Mørup-Petersen STVH 1. Vurdering storflodsrisiko elle Seden
Reguleringsprojekt for Nødebohuse Pumpekanal 2016
 Reguleringsprojekt for Nødebohuse Pupekanal 2016 Baggrund og redegørelse for valg af skikkelse Eksisterende forhold En regulativopåling af Nødebohuse Pupekanal i 2013 viser tydeligt, at vandløbet i størstedelen
Reguleringsprojekt for Nødebohuse Pupekanal 2016 Baggrund og redegørelse for valg af skikkelse Eksisterende forhold En regulativopåling af Nødebohuse Pupekanal i 2013 viser tydeligt, at vandløbet i størstedelen
Titel: Landmåling og Kortlægning, Harrestrup Ådal, Ballerup
 Landmåling og kortlægning Gruppe L5_CHP07 Jakob B. Frantzen og Birgitte R. Nissen Landinspektøruddannelsen 5. semester Aalborg Universitet København, København, december 2009 Titel: Landmåling og Kortlægning,
Landmåling og kortlægning Gruppe L5_CHP07 Jakob B. Frantzen og Birgitte R. Nissen Landinspektøruddannelsen 5. semester Aalborg Universitet København, København, december 2009 Titel: Landmåling og Kortlægning,
~d41ajnqjt~ ~JTrLt~&~ YC~ niirnwn~y~ L~aJrL~ ~ ~, U~øc& ~ap, y~1, i. ?77å1 1:25.000. ~a~vu.
 d41ajnqjt JTrLt& avu YC niirnwny LaJrL, Uøc& ap, y1, i?77å1 1:25000 Ullerslev Koune - Lokalpian nr 31 for en flugtskydebane i Kissendrup REDEGØRELSE FOR LOKALPLANEN Redegørelse side 1 Lokalpianens baggrund
d41ajnqjt JTrLt& avu YC niirnwny LaJrL, Uøc& ap, y1, i?77å1 1:25000 Ullerslev Koune - Lokalpian nr 31 for en flugtskydebane i Kissendrup REDEGØRELSE FOR LOKALPLANEN Redegørelse side 1 Lokalpianens baggrund
Produkt og marked - matematiske og statistiske metoder
 Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet February 19, 2016 1/26 Kursusindhold: Sandsynlighedsregning og lagerstyring
Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet February 19, 2016 1/26 Kursusindhold: Sandsynlighedsregning og lagerstyring
Kompendium til Geogebra
 Kompendium til Geogebra Hardsyssel Efterskole Matematik 8. Klasse Side 1 af 12 Kompendium til Geogebra 1. Generel præsentation af Geogebra 1.1 Download af programmet Geogebra kan gratis downloades fra
Kompendium til Geogebra Hardsyssel Efterskole Matematik 8. Klasse Side 1 af 12 Kompendium til Geogebra 1. Generel præsentation af Geogebra 1.1 Download af programmet Geogebra kan gratis downloades fra
Vektorer og lineær regression
 Vektorer og lineær regression Peter Harremoës Niels Brock April 03 Planproduktet Vi har set, at man kan gange en vektor med et tal Et oplagt spørgsmål er, om man også kan gange to vektorer med hinanden
Vektorer og lineær regression Peter Harremoës Niels Brock April 03 Planproduktet Vi har set, at man kan gange en vektor med et tal Et oplagt spørgsmål er, om man også kan gange to vektorer med hinanden
Kursusindhold: Produkt og marked - matematiske og statistiske metoder. Monte Carlo
 Kursusindhold: Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet Sandsynlighedsregning og lagerstyring Normalfordelingen og Monte
Kursusindhold: Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet Sandsynlighedsregning og lagerstyring Normalfordelingen og Monte
POPCORN. Lærervejledning:
 POPCORN Lærervejledning: Denne øvelse o popcorn kan laves i forbindelse ed et forløb o tryk. Det er ikke den uiddelbare plan at eleverne skal ind og kigge nærere på hvad popcorn er, en ved at bruge et
POPCORN Lærervejledning: Denne øvelse o popcorn kan laves i forbindelse ed et forløb o tryk. Det er ikke den uiddelbare plan at eleverne skal ind og kigge nærere på hvad popcorn er, en ved at bruge et
Vektorer og lineær regression. Peter Harremoës Niels Brock
 Vektorer og lineær regression Peter Harremoës Niels Brock April 2013 1 Planproduktet Vi har set, at man kan gange en vektor med et tal. Et oplagt spørgsmål er, om man også kan gange to vektorer med hinanden.
Vektorer og lineær regression Peter Harremoës Niels Brock April 2013 1 Planproduktet Vi har set, at man kan gange en vektor med et tal. Et oplagt spørgsmål er, om man også kan gange to vektorer med hinanden.
NÆRINGSINDHOLD I KORN FRA HØSTEN FORELØBIGE RESULTATER
 NÆRINGSINDHOLD I KORN FRA HØSTEN - FORELØBIGE RESULTATER NOTAT NR. 17XX Resultaterne fra vinterbyg, vårbyg, hvede, rug og havre viser i forhold til høsten et fald i fosfor- og råproteinkoncentrationen.
NÆRINGSINDHOLD I KORN FRA HØSTEN - FORELØBIGE RESULTATER NOTAT NR. 17XX Resultaterne fra vinterbyg, vårbyg, hvede, rug og havre viser i forhold til høsten et fald i fosfor- og råproteinkoncentrationen.
Nivelleringsinstrument 8926 Betjeningsvejledning
 Nivelleringsinstrument 8926 Betjeningsvejledning - 1 - BESKRIVELSE (FIG. 1) 1. Bundplade 2. Vandret cirkel /gon-skala 3. Vandret cirkel referencemærke / gonskala-aflæsning 4. Kompensatorlås 5. Fokuseringsskruer
Nivelleringsinstrument 8926 Betjeningsvejledning - 1 - BESKRIVELSE (FIG. 1) 1. Bundplade 2. Vandret cirkel /gon-skala 3. Vandret cirkel referencemærke / gonskala-aflæsning 4. Kompensatorlås 5. Fokuseringsskruer
Lineære sammenhænge, residualplot og regression
 Lineære sammenhænge, residualplot og regression Opgave 1: Er der en bagvedliggende lineær sammenhæng? I mange sammenhænge indsamler man data som man ønsker at undersøge og afdække eventuelle sammenhænge
Lineære sammenhænge, residualplot og regression Opgave 1: Er der en bagvedliggende lineær sammenhæng? I mange sammenhænge indsamler man data som man ønsker at undersøge og afdække eventuelle sammenhænge
Pythagoras Ensvinklede trekanter Trigonometri. Helle Fjord Morten Graae Kim Lorentzen Kristine Møller-Nielsen
 MATEMATIKBANKENS P.E.T. KOMPENDIUM Pythagoras Ensvinklede trekanter Trigonometri Helle Fjord Morten Graae Kim Lorentzen Kristine Møller-Nielsen FORENKLEDE FÆLLES MÅL FOR PYTHAGORAS, ENSVINKLEDE TREKANTER
MATEMATIKBANKENS P.E.T. KOMPENDIUM Pythagoras Ensvinklede trekanter Trigonometri Helle Fjord Morten Graae Kim Lorentzen Kristine Møller-Nielsen FORENKLEDE FÆLLES MÅL FOR PYTHAGORAS, ENSVINKLEDE TREKANTER
Matematik A og Informationsteknologi B
 Matematik A og Informationsteknologi B Projektopgave 2 Eksponentielle modeller Benjamin Andreas Olander Christiansen Jens Werner Nielsen Klasse 2.4 6. december 2010 Vejledere: Jørn Christian Bendtsen og
Matematik A og Informationsteknologi B Projektopgave 2 Eksponentielle modeller Benjamin Andreas Olander Christiansen Jens Werner Nielsen Klasse 2.4 6. december 2010 Vejledere: Jørn Christian Bendtsen og
~d41ajnqjt~ ~JTrLt~&~ YC~ niirnwn~y~ L~aJrL~ ~ ~, U~øc& ~ap, y~1, i. ?77å1 1:25.000. ~a~vu.
 ~d41ajnqjt~ ~JTrLt~&~ ~a~vu. YC~ niirnwn~y~ L~aJrL~ ~ ~, U~øc& ~ap, y~1, i?77å1 1:25.000 Ullerslev Koune - Lokalpian nr. 31 for en flugtskydebane i Kissendrup REDEGØRELSE FOR LOKALPLANEN Redegørelse side
~d41ajnqjt~ ~JTrLt~&~ ~a~vu. YC~ niirnwn~y~ L~aJrL~ ~ ~, U~øc& ~ap, y~1, i?77å1 1:25.000 Ullerslev Koune - Lokalpian nr. 31 for en flugtskydebane i Kissendrup REDEGØRELSE FOR LOKALPLANEN Redegørelse side
Boxsekstant (Francis Barker) instrumentbeskrivelse og virkemåde
 instrumentbeskrivelse og virkemåde") Boxsekstant (Francis Barker) instrumentbeskrivelse og virkemåde Sekstantens dele Figur 1. Boxsekstanten i sit læderetui. Figur 2 Boxsekstanten med etuioverdelen knappet af. Boxsekstanten eller lommesekstanten
Boxsekstant (Francis Barker) instrumentbeskrivelse og virkemåde Sekstantens dele Figur 1. Boxsekstanten i sit læderetui. Figur 2 Boxsekstanten med etuioverdelen knappet af. Boxsekstanten eller lommesekstanten
Afstande, skæringer og vinkler i rummet
 Afstande, skæringer og vinkler i rummet Frank Villa 2. maj 202 c 2008-20. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Indhold
Afstande, skæringer og vinkler i rummet Frank Villa 2. maj 202 c 2008-20. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her. Indhold
Vedr.: OML-beregninger Akafa
 Loos Scandinavia A/S Østergårdsvej 4 6372 Bylderup-Bov Att.: Kjeld P. Callesen sottrup@tdcadsl.dk Vor ref. HAP WH sag nr. 07057 Dato: Skanderborg, den 29. august 2007 Vedr.: OML-beregninger Akafa Der er
Loos Scandinavia A/S Østergårdsvej 4 6372 Bylderup-Bov Att.: Kjeld P. Callesen sottrup@tdcadsl.dk Vor ref. HAP WH sag nr. 07057 Dato: Skanderborg, den 29. august 2007 Vedr.: OML-beregninger Akafa Der er
Præcisering af trendanalyser af den normaliserede totale og diffuse kvælstoftransport i perioden
 Præcisering af trendanalyser af den normaliserede totale og diffuse kvælstoftransport i perioden 2005-2012 Notat fra DCE - Nationalt Center for Miljø og Energi Dato: 7. april 2014 30. april 2014 Søren
Præcisering af trendanalyser af den normaliserede totale og diffuse kvælstoftransport i perioden 2005-2012 Notat fra DCE - Nationalt Center for Miljø og Energi Dato: 7. april 2014 30. april 2014 Søren
SUNDHEDSSTYRELSEN UNGE OG ALKOHOL
 SUNDHEDSSTYRELSEN UNGE OG ALKOHOL TABELRAPPORT, IT- KOMBI UNDERSØGELSE SEPTEMBER 2017 PROJEKTLEDER: CASPER O. JENSEN A L H A M B R AV E J 1 2 1 8 2 6 F R E D E R I K S B E R G C / / C V R N R. 1 4 9 0
SUNDHEDSSTYRELSEN UNGE OG ALKOHOL TABELRAPPORT, IT- KOMBI UNDERSØGELSE SEPTEMBER 2017 PROJEKTLEDER: CASPER O. JENSEN A L H A M B R AV E J 1 2 1 8 2 6 F R E D E R I K S B E R G C / / C V R N R. 1 4 9 0
Kursusindhold: Produkt og marked - matematiske og statistiske metoder. Monte Carlo
 Kursusindhold: Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet Sandsynlighedsregning og lagerstyring Normalfordelingen og Monte
Kursusindhold: Produkt og marked - matematiske og statistiske metoder Rasmus Waagepetersen Institut for Matematiske Fag Aalborg Universitet Sandsynlighedsregning og lagerstyring Normalfordelingen og Monte
PIPES FOR LIFE PIPELIFE DRÆNRØR. Drænrør. Drænrør
 PIPES FOR LIFE PIPELIFE DRÆNRØR Drænrør Drænrør PIPES FOR LIFE PIPELIFE Pipelife drænrör I en tid, hvor konkurrencen bliver stadig hårdere, kræver en fortsat god økonoi, at landbrugets produktionsressourcer
PIPES FOR LIFE PIPELIFE DRÆNRØR Drænrør Drænrør PIPES FOR LIFE PIPELIFE Pipelife drænrör I en tid, hvor konkurrencen bliver stadig hårdere, kræver en fortsat god økonoi, at landbrugets produktionsressourcer
Afstande, skæringer og vinkler i rummet
 Afstande, skæringer og vinkler i rummet Frank Nasser 9. april 20 c 2008-20. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her.
Afstande, skæringer og vinkler i rummet Frank Nasser 9. april 20 c 2008-20. Dette dokument må kun anvendes til undervisning i klasser som abonnerer på MatBog.dk. Se yderligere betingelser for brug her.
Leica Lino L360, L2P5, L2+, L2, P5, P3
 Leica Lino L360, L25, L2+, L2, 5, 3 Brugervejledning Version 757665g Dansk Tillykke ed dit køb af en Leica Lino. Sikkerhedsanvisningerne findes i afsnittet o betjening af dette instruent. ør opstart af
Leica Lino L360, L25, L2+, L2, 5, 3 Brugervejledning Version 757665g Dansk Tillykke ed dit køb af en Leica Lino. Sikkerhedsanvisningerne findes i afsnittet o betjening af dette instruent. ør opstart af
1/41. 2/41 Landmålingens fejlteori - Lektion 1 - Kontinuerte stokastiske variable
 Landmålingens fejlteori - lidt om kurset Landmålingens fejlteori Lektion 1 Det matematiske fundament Kontinuerte stokastiske variable - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet Kursusholder
Landmålingens fejlteori - lidt om kurset Landmålingens fejlteori Lektion 1 Det matematiske fundament Kontinuerte stokastiske variable - rw@math.aau.dk Institut for Matematiske Fag Aalborg Universitet Kursusholder
Dæmpet harmonisk oscillator
 FY01 Obligatorisk laboratorieøvelse Dæmpet harmonisk oscillator Hold E: Hold: D1 Jacob Christiansen Afleveringsdato: 4. april 003 Morten Olesen Andreas Lyder Indholdsfortegnelse Indholdsfortegnelse 1 Formål...3
FY01 Obligatorisk laboratorieøvelse Dæmpet harmonisk oscillator Hold E: Hold: D1 Jacob Christiansen Afleveringsdato: 4. april 003 Morten Olesen Andreas Lyder Indholdsfortegnelse Indholdsfortegnelse 1 Formål...3
Landmåling og kortlægning
 Landmåling og kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 6 Dijana Lubarda Malene Kobberø Regitse Vammen Titel/tema:
Landmåling og kortlægning Landinspektøruddannelsens 5. semester 2009 Aalborg Universitet Institut for Samfundsudvikling og Planlægning Gruppe 6 Dijana Lubarda Malene Kobberø Regitse Vammen Titel/tema:
Matematik B. Studentereksamen. Tirsdag den 27. maj 2014 kl stx141-MAT/B
 Matematik B Studentereksamen 2stx141-MAT/B-27052014 Tirsdag den 27. maj 2014 kl. 9.00-13.00 Opgavesættet er delt i to dele. Delprøven uden hjælpemidler består af opgave 1-6 med i alt 6 spørgsmål. Delprøven
Matematik B Studentereksamen 2stx141-MAT/B-27052014 Tirsdag den 27. maj 2014 kl. 9.00-13.00 Opgavesættet er delt i to dele. Delprøven uden hjælpemidler består af opgave 1-6 med i alt 6 spørgsmål. Delprøven
House of Technology Opfølgningsplan 2015
 Opfølgning og evaluering på sidste års indsatser udfyldes. Derefter udvælges indst 5 indsatser inden for prioriteringsoråderne til forbedring jvf. skolens kvalitetscirkel ud fra dataindsalingen i 2014
Opfølgning og evaluering på sidste års indsatser udfyldes. Derefter udvælges indst 5 indsatser inden for prioriteringsoråderne til forbedring jvf. skolens kvalitetscirkel ud fra dataindsalingen i 2014
Leica Lino L360, L2P5, L2+, L2G+, L2, P5, P3
 Leica Lino L360, L25, L2+, L2G+, L2, 5, 3 Brugervejledning Version 757665i Dansk Tillykke ed dit køb af en Leica Lino. Sikkerhedsanvisningerne findes i afsnittet o betjening af dette instruent. ør opstart
Leica Lino L360, L25, L2+, L2G+, L2, 5, 3 Brugervejledning Version 757665i Dansk Tillykke ed dit køb af en Leica Lino. Sikkerhedsanvisningerne findes i afsnittet o betjening af dette instruent. ør opstart
Opgave 1. Sommereksamen 29. maj 2002. Spørgsmål 1.1: Sommereksamen 29. maj 2002. Dette sæt indeholder løsningsforslag til:
 Soereksaen 9. aj 00 Dette sæt indeholder løsningsforslag til: Soereksaen 9. aj 00 Det skal her understreges, at der er tale o et løsningsforslag. Nogle af opgaverne er rene beregningsopgaver, hvor der
Soereksaen 9. aj 00 Dette sæt indeholder løsningsforslag til: Soereksaen 9. aj 00 Det skal her understreges, at der er tale o et løsningsforslag. Nogle af opgaverne er rene beregningsopgaver, hvor der
Måling af turbulent strømning
 Måling af turbulent strømning Formål Formålet med at måle hastighedsprofiler og fluktuationer i en turbulent strømning er at opnå et tilstrækkeligt kalibreringsgrundlag til modellering af turbulent strømning
Måling af turbulent strømning Formål Formålet med at måle hastighedsprofiler og fluktuationer i en turbulent strømning er at opnå et tilstrækkeligt kalibreringsgrundlag til modellering af turbulent strømning
RENTES REGNING SIMULATION LANDMÅLING MÅLSCORE I HÅNDBO . K R I S T I A N S E N KUGLE G Y L D E N D A L
 SIMULATION 4 2 RENTES REGNING F I NMED N H REGNEARK. K R I S T I A N S E N KUGLE 5 LANDMÅLING 3 MÅLSCORE I HÅNDBO G Y L D E N D A L Faglige mål: Anvende simple geometriske modeller og løse simple geometriske
SIMULATION 4 2 RENTES REGNING F I NMED N H REGNEARK. K R I S T I A N S E N KUGLE 5 LANDMÅLING 3 MÅLSCORE I HÅNDBO G Y L D E N D A L Faglige mål: Anvende simple geometriske modeller og løse simple geometriske
A. Eftervisning af bygningens stabilitet
 A. Eftervisning af bygningens stabilitet For at eftervise bygningens rulige stabilitet eftervises det, at alle bygningsdele i den bærende konstruktion er i stabil ligevægt satidig ed, at deforationer og
A. Eftervisning af bygningens stabilitet For at eftervise bygningens rulige stabilitet eftervises det, at alle bygningsdele i den bærende konstruktion er i stabil ligevægt satidig ed, at deforationer og
QUICKGUIDE. til Skab overflade i icp41/42
 til Skab overflade i icp41/42 1. I denne guide gennemgåes hvordan der skabes en overflade. Vi vil tage udgangspunkt i en afgravning til et rør mellem 2 brønde som vi kender punktnumrene på. Dette er blot
til Skab overflade i icp41/42 1. I denne guide gennemgåes hvordan der skabes en overflade. Vi vil tage udgangspunkt i en afgravning til et rør mellem 2 brønde som vi kender punktnumrene på. Dette er blot
Kontrolopmåling 2012 af Øvre Suså
 Rekvirent Næstved Kommune Att. Palle Myssen Teknik- og miljøforvaltningen Rådmandshaven 20 4700 Næstved Rådgiver Orbicon Ringstedvej 20 4000 Roskilde Telefon 46 30 03 10 E-mail sgsc@orbicon.dk Sag 3691200001-02
Rekvirent Næstved Kommune Att. Palle Myssen Teknik- og miljøforvaltningen Rådmandshaven 20 4700 Næstved Rådgiver Orbicon Ringstedvej 20 4000 Roskilde Telefon 46 30 03 10 E-mail sgsc@orbicon.dk Sag 3691200001-02
Erhvervsøkonomi Efterår 2006 Afleveringsopgave nr. 1
 Erhvervsøkonoi Efterår 006 Afleveringsopgave nr. Opgave : Sko-Let Aps Opgave 8.3 Sko-Let A/S i Økonoistyring og budgettering af Jens Oksen Jensen og Ole Christensen. Spørgsål.: Hvad er det forventede breakeven-punkt
Erhvervsøkonoi Efterår 006 Afleveringsopgave nr. Opgave : Sko-Let Aps Opgave 8.3 Sko-Let A/S i Økonoistyring og budgettering af Jens Oksen Jensen og Ole Christensen. Spørgsål.: Hvad er det forventede breakeven-punkt
Danske koordinatsystemr (referencesystemer) MicroStation V8i. Begreber
 MicroStation V8i. Begreber") Danske koordinatsystemr (referencesystemer) MicroStation V8i Begreber 1 Columbus tog fejl! - jorden er flad når vi tegner i MicroStation!!! Geodætiske begreber definition af jorden Jordens overflade Jordens
Danske koordinatsystemr (referencesystemer) MicroStation V8i Begreber 1 Columbus tog fejl! - jorden er flad når vi tegner i MicroStation!!! Geodætiske begreber definition af jorden Jordens overflade Jordens
Kalundborg Kommune Kontrolopmåling Rekvirent. Rådgiver. Kalundborg Kommune Plan Byg og Miljø Højvangen Svebølle
 Rekvirent Kalundborg Kommune Plan Byg og Miljø Højvangen 9 4470 Svebølle att. Michael Tranekjær Jensen Rådgiver Orbicon Leif Hansen A/S Ringstedvej 4000 Roskilde Telefon 46 30 03 10 E-mail fanm@orbicon.dk
Rekvirent Kalundborg Kommune Plan Byg og Miljø Højvangen 9 4470 Svebølle att. Michael Tranekjær Jensen Rådgiver Orbicon Leif Hansen A/S Ringstedvej 4000 Roskilde Telefon 46 30 03 10 E-mail fanm@orbicon.dk
Projektrapport. Kortlægning og afsætning
 Projektrapport Kortlægning og afsætning Udarbejdet af gruppe L5aal2011_01 Landinspektøruddannelsens 5. semester Kathrine Schmidt, Winnie Husted Andersen og Esben Dalsgaard Johansen Aalborg Universitet,
Projektrapport Kortlægning og afsætning Udarbejdet af gruppe L5aal2011_01 Landinspektøruddannelsens 5. semester Kathrine Schmidt, Winnie Husted Andersen og Esben Dalsgaard Johansen Aalborg Universitet,
Boxsekstant (kopi) instrumentbeskrivelse og virkemåde
 instrumentbeskrivelse og virkemåde") Boxsekstant (kopi) instrumentbeskrivelse og virkemåde Sekstantens dele Figur 1. Boxsekstanten med låget skruet på som håndtag. Figur 2 Boxsekstanten anbragt i sin trækasse i lukket tilstand. Boxsekstanten
Boxsekstant (kopi) instrumentbeskrivelse og virkemåde Sekstantens dele Figur 1. Boxsekstanten med låget skruet på som håndtag. Figur 2 Boxsekstanten anbragt i sin trækasse i lukket tilstand. Boxsekstanten
Differential- regning
 Differential- regning del f(5) () f f () f ( ) I 5 () 006 Karsten Juul Indhold 6 Kontinuert funktion 7 Monotoniforhold7 8 Lokale ekstrema44 9 Grænseværdi5 Differentialregning del udgave 006 006 Karsten
Differential- regning del f(5) () f f () f ( ) I 5 () 006 Karsten Juul Indhold 6 Kontinuert funktion 7 Monotoniforhold7 8 Lokale ekstrema44 9 Grænseværdi5 Differentialregning del udgave 006 006 Karsten
NANO-SCIENCE CENTER KØBENHAVNS UNIVERSITET. Se det usynlige. - øvelsesvejledninger
 Se det usynlige - øvelsesvejledninger INDHOLDSFORTEGNELSE OG KOLOFON "Se det usynlige" øvelsesvejledninger Indholdsfortegnelse Undersøg laserlysets interferensønster... 3 Beste tykkelsen af et hår... 7
Se det usynlige - øvelsesvejledninger INDHOLDSFORTEGNELSE OG KOLOFON "Se det usynlige" øvelsesvejledninger Indholdsfortegnelse Undersøg laserlysets interferensønster... 3 Beste tykkelsen af et hår... 7
VUC Vestsjælland Syd, Slagelse Nr. 1 Institution: Projekt Trigonometri
 VUC Vestsjælland Syd, Slagelse Nr. 1 Institution: 333247 2015 Anders Jørgensen, Mark Kddafi, David Jensen, Kourosh Abady og Nikolaj Eriksen 1. Indledning I dette projekt, vil man kunne se definitioner
VUC Vestsjælland Syd, Slagelse Nr. 1 Institution: 333247 2015 Anders Jørgensen, Mark Kddafi, David Jensen, Kourosh Abady og Nikolaj Eriksen 1. Indledning I dette projekt, vil man kunne se definitioner
Computerundervisning
 Frederiksberg Seminarium Computerundervisning Koordinatsystemer og Funktioner Lærervejledning 12-02-2009 Udarbejdet af: Pernille Suhr Poulsen Christina Klitlyng Julie Nielsen Indhold Introduktion... 3
Frederiksberg Seminarium Computerundervisning Koordinatsystemer og Funktioner Lærervejledning 12-02-2009 Udarbejdet af: Pernille Suhr Poulsen Christina Klitlyng Julie Nielsen Indhold Introduktion... 3
Introduktion til GeoGebra
 Introduktion til GeoGebra Om navne Ib Michelsen Herover ses GeoGebra's brugerflade. 1 I øverste linje finder du navnet GeoGebra og ikoner til at minimere vinduet, ændre til fuldskærm og lukke I næste linje
Introduktion til GeoGebra Om navne Ib Michelsen Herover ses GeoGebra's brugerflade. 1 I øverste linje finder du navnet GeoGebra og ikoner til at minimere vinduet, ændre til fuldskærm og lukke I næste linje
PROJEKTLEDER UDFÆRDIGET AF
 eo0.docx 202-03-28-4 NOTAT - N2.099.7 PROJEKT Nye boliger på Ågade - trafikstøj PROJEKTNUMMER 35.7497.0 PROJEKTLEDER Søren Vestbjerg Andersen UDFÆRDIGET AF Søren Vestbjerg Andersen DATO 207-09-8 Indledning
eo0.docx 202-03-28-4 NOTAT - N2.099.7 PROJEKT Nye boliger på Ågade - trafikstøj PROJEKTNUMMER 35.7497.0 PROJEKTLEDER Søren Vestbjerg Andersen UDFÆRDIGET AF Søren Vestbjerg Andersen DATO 207-09-8 Indledning
2 Erik Vestergaard www.matematikfysik.dk
 Erik Vestergaard www.matematikfysik.dk Erik Vestergaard www.matematikfysik.dk 3 Lineære funktioner En vigtig type funktioner at studere er de såkaldte lineære funktioner. Vi skal udlede en række egenskaber
Erik Vestergaard www.matematikfysik.dk Erik Vestergaard www.matematikfysik.dk 3 Lineære funktioner En vigtig type funktioner at studere er de såkaldte lineære funktioner. Vi skal udlede en række egenskaber
Landinspektørstudiet Landmåling og kortlægning Gruppe 9 5. semester Omkring Aalborghus kollegiet Efteråret 2008
 Forord Denne rapport udgør, sammen med dens bilag, afrapporteringen af semesterprojektet for en projektgruppe på landinspektørstudiets femte semester, hvis overordnede tema er landmåling og kortlægning.
Forord Denne rapport udgør, sammen med dens bilag, afrapporteringen af semesterprojektet for en projektgruppe på landinspektørstudiets femte semester, hvis overordnede tema er landmåling og kortlægning.
Vilkår for roe logistik
 Bilag 2 til Leveringskontrakt Vilkår for roe logistik Gældende fra juni 2019 NS-organiseret transport beskrives i første del af bilaget Transport af egne roer beskrives i anden del af bilaget NS-organiseret
Bilag 2 til Leveringskontrakt Vilkår for roe logistik Gældende fra juni 2019 NS-organiseret transport beskrives i første del af bilaget Transport af egne roer beskrives i anden del af bilaget NS-organiseret